JP6200312B2 - 車両用電動機の制御装置 - Google Patents
車両用電動機の制御装置 Download PDFInfo
- Publication number
- JP6200312B2 JP6200312B2 JP2013265231A JP2013265231A JP6200312B2 JP 6200312 B2 JP6200312 B2 JP 6200312B2 JP 2013265231 A JP2013265231 A JP 2013265231A JP 2013265231 A JP2013265231 A JP 2013265231A JP 6200312 B2 JP6200312 B2 JP 6200312B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- vehicle
- braking
- value
- driving force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
この駆動モードは、車両Vの加速走行中などに、バッテリ7の電力を用いて第1及び第2リヤモータ41、61で力行を行い、それらの動力で左右の後輪WRL、WRRを駆動する動作モードである。この駆動モードでは、基本的に、第1及び第2リヤモータ41、61の目標トルクTROBJが互いに同じ正値に設定される。そして、目標トルクTROBJに応じた電力を第1及び第2リヤモータ41、61に供給し、ロータ43、63を正転させることによって、ワンウェイクラッチ83を係合させるとともに、油圧ブレーキ84で第1及び第2リングギヤ53、73を制動する。
この回生モードは、車両Vの減速走行中などに、車両Vの走行エネルギを用いて、第1及び第2リヤモータ41、61で、後輪WRL、WRRを制動しながら回生を行い、発電した電力をバッテリ7に充電する動作モードである。この回生モードでは、基本的に、第1及び第2リヤモータ41、61の目標トルクTROBJが互いに同じ負値に設定され、その値に応じて、第1及び第2リヤモータ41、61で回生される電力を制御するとともに、油圧ブレーキ84で第1及び第2リングギヤ53、73を制動する。
この左右逆駆動モードは、車両Vの旋回時などに、第1及び第2リヤモータ41、61の一方で力行を行うと同時に、他方で回生を行う動作モードである。この左右逆駆動モードでは、第1及び第2目標トルクTRLOBJ、TRROBJの一方が正値に、他方が負値に設定され、それらの値に応じて、一方に供給される電力及び他方で回生される電力を制御するとともに、油圧ブレーキ84で第1及び第2リングギヤ53、73を制動する。図6は、第1リヤモータ41で力行を、第2リヤモータ61で回生を行ったときの、各種の回転要素の間の回転数の関係及びトルクの釣合関係を示している。同図における各種のパラメータは、図4及び図5を参照して説明したとおりである。
NTOR=NTOR・KF+NTORZ・(1−KF) ・・・(1)
ここで、NTORZは、ねじれ分回転数NTORの前回値、KFは所定の重み係数である(0<KF<1)。
ΔN=(NMOTL−NWCONV)−NTOR ・・・(2)
式(2)から明らかなように、回転数偏差ΔNは、基本的に、ねじれ分回転数NTORと後輪回転数換算値NWCONVLとの差であり、さらにねじれ分回転数NTORを差し引くことによって、動力伝達系のねじれ分の回転数を補償したものである。
ΔTR=ΔN・KP・KTR・KVP ・・・(3)
41 第1リヤモータ(電動機)
52 第1サンギヤ(ギヤ)
53 第1リングギヤ(ギヤ)
54 2連ピニオンギヤ(ギヤ)
61 第2リヤモータ(電動機)
72 第2サンギヤ(ギヤ)
73 第2リングギヤ(ギヤ)
74 2連ピニオンギヤ(ギヤ)
101a 車輪回転数センサ(車速取得手段)
101b 車輪回転数センサ(車速取得手段)
101c 車輪回転数センサ(車速取得手段、第2回転速度パラメータ取得手段)
101d 車輪回転数センサ(車速取得手段、第2回転速度パラメータ取得手段)
102a モータ回転数センサ(第1回転速度パラメータ取得手段)
102b モータ回転数センサ(第1回転速度パラメータ取得手段)
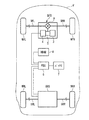
V ハイブリッド車両(車両)
WRL 左後輪(車輪)
WRR 右後輪(車輪)
NMOTL モータ回転数(第1回転速度パラメータ、基準値)
NMOTR モータ回転数(第1回転速度パラメータ、基準値)
NWRL 左後輪の車輪回転数(第2回転速度パラメータ)
NWRR 右後輪の車輪回転数(第2回転速度パラメータ)
RG ギヤ比
NWCONV 後輪回転数換算値(換算値)
NTOR ねじれ分回転数(ねじれ分相当値)
TRREQ モータ要求トルク(電動機の制駆動力、電動機の要求制駆動力)
TROBJ リヤモータの目標トルク
TR2 第2所定値(所定値)
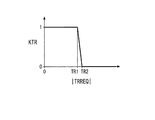
VP 車速(車両の速度)
V1 第1速度
V2 第2速度
Claims (3)
- 互いに噛み合う複数のギヤを有する動力伝達系を介して車両の車輪に機械的に連結され、前記動力伝達系を介して前記車輪を駆動又は制動する発電可能な電動機を制御する車両用電動機の制御装置であって、
前記動力伝達系よりも前記電動機側である所定の第1位置における回転速度を表す第1回転速度パラメータを取得する第1回転速度パラメータ取得手段と、
前記動力伝達系よりも前記車輪側である所定の第2位置における回転速度を表す第2回転速度パラメータを取得する第2回転速度パラメータ取得手段と、
前記取得された第1及び第2回転速度パラメータの一方を基準値とするとともに、前記複数のギヤのギヤ比に基づき、前記第1及び第2回転速度パラメータの他方を前記基準値を基準として換算した値を、換算値として算出する換算値算出手段と、
前記車輪を駆動又は制動する前記電動機の制駆動力を取得する制駆動力取得手段と、
該取得された電動機の制駆動力に基づき、前記第1位置と前記第2位置との間における前記動力伝達系のねじれ分に相当する回転速度パラメータを、ねじれ分相当値として算出するねじれ分相当値算出手段と、
前記基準値と前記算出された換算値との乖離度合、及び前記算出されたねじれ分相当値に基づいて、前記電動機を制御する電動機制御手段と、を備え、
前記電動機制御手段は、
前記車両の運転状態に基づいて、前記電動機に要求される要求制駆動力を算出する要求制駆動力算出手段と、
該算出された要求制駆動力を、前記乖離度合及び前記ねじれ分相当値に基づき、前記乖離度合が減少するように補正することによって、前記電動機の目標制駆動力を設定する補正手段と、を有し、
前記補正手段は、前記要求制駆動力の絶対値が所定値以下のときに、前記要求制駆動力の補正を実行することを特徴とする車両用電動機の制御装置。 - 互いに噛み合う複数のギヤを有する動力伝達系を介して車両の車輪に機械的に連結され、前記動力伝達系を介して前記車輪を駆動又は制動する発電可能な電動機を制御する車両用電動機の制御装置であって、
前記動力伝達系よりも前記電動機側である所定の第1位置における回転速度を表す第1回転速度パラメータを取得する第1回転速度パラメータ取得手段と、
前記動力伝達系よりも前記車輪側である所定の第2位置における回転速度を表す第2回転速度パラメータを取得する第2回転速度パラメータ取得手段と、
前記取得された第1及び第2回転速度パラメータの一方を基準値とするとともに、前記複数のギヤのギヤ比に基づき、前記第1及び第2回転速度パラメータの他方を前記基準値を基準として換算した値を、換算値として算出する換算値算出手段と、
前記車輪を駆動又は制動する前記電動機の制駆動力を取得する制駆動力取得手段と、
該取得された電動機の制駆動力に基づき、前記第1位置と前記第2位置との間における前記動力伝達系のねじれ分に相当する回転速度パラメータを、ねじれ分相当値として算出するねじれ分相当値算出手段と、
前記基準値と前記算出された換算値との乖離度合、及び前記算出されたねじれ分相当値に基づいて、前記電動機を制御する電動機制御手段と、を備え、
前記電動機制御手段は、
前記車両の運転状態に基づいて、前記電動機に要求される要求制駆動力を算出する要求制駆動力算出手段と、
該算出された要求制駆動力を、前記乖離度合及び前記ねじれ分相当値に基づき、前記乖離度合が減少するように補正することによって、前記電動機の目標制駆動力を設定する補正手段と、を有し、
前記車両の速度を取得する車速取得手段をさらに備え、
前記補正手段は、前記取得された車両の速度が所定の第1速度以上のときには、該車両の速度が高いほど、前記要求制駆動力の補正度合をより低減することを特徴とする車両用電動機の制御装置。 - 前記車両の速度が低車速状態を表す所定の第2速度以下のときに、前記補正手段による前記要求制駆動力の補正を禁止する補正禁止手段をさらに備えることを特徴とする、請求項2に記載の車両用電動機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013265231A JP6200312B2 (ja) | 2013-12-24 | 2013-12-24 | 車両用電動機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013265231A JP6200312B2 (ja) | 2013-12-24 | 2013-12-24 | 車両用電動機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015122871A JP2015122871A (ja) | 2015-07-02 |
| JP6200312B2 true JP6200312B2 (ja) | 2017-09-20 |
Family
ID=53534034
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013265231A Active JP6200312B2 (ja) | 2013-12-24 | 2013-12-24 | 車両用電動機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6200312B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11091021B2 (en) | 2016-08-24 | 2021-08-17 | Honda Motor Co., Ltd. | Power plant |
| CN109552069A (zh) * | 2018-12-24 | 2019-04-02 | 上海大郡动力控制技术有限公司 | 基于靠齿策略和主动阻尼的纯电动汽车抖动抑制方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2737065B2 (ja) * | 1991-12-13 | 1998-04-08 | 東洋電機製造株式会社 | ねじり振動抑制制御方式 |
| US6806667B1 (en) * | 2003-05-23 | 2004-10-19 | Toyota Jidosha Kabushiki Kaisha | Control unit and control method for controlling vibration of an electric vehicle |
| JP2009196533A (ja) * | 2008-02-22 | 2009-09-03 | Aisin Aw Co Ltd | 回転電機制御システム及び当該回転電機制御システムを備えた車両駆動システム |
| JP4877296B2 (ja) * | 2008-08-21 | 2012-02-15 | トヨタ自動車株式会社 | 駆動装置およびその制御装置 |
| JP5226627B2 (ja) * | 2009-07-31 | 2013-07-03 | 本田技研工業株式会社 | 車両の駆動制御装置 |
-
2013
- 2013-12-24 JP JP2013265231A patent/JP6200312B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015122871A (ja) | 2015-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6666449B2 (ja) | 動力装置 | |
| JP4548543B2 (ja) | ハイブリッド車両の駆動トルク制御装置 | |
| JP2005138743A (ja) | ハイブリッド車両の駆動力制御装置 | |
| US8512202B2 (en) | Shift controller and shift controlling method | |
| US20080302590A1 (en) | Drive system for vehicle | |
| JP2005016559A (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP6029572B2 (ja) | 車両のスリップ判定装置 | |
| JP5971330B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP4949918B2 (ja) | 車両およびその制御方法 | |
| JP6200312B2 (ja) | 車両用電動機の制御装置 | |
| JP5119987B2 (ja) | ハイブリッド車およびその制御方法 | |
| WO2013145091A1 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP2008143462A (ja) | 車両及びその制御方法 | |
| JP5824501B2 (ja) | ハイブリッド車両の制御装置 | |
| JP7284831B2 (ja) | ハイブリッドシステムの制御方法及び制御システム | |
| JP2009161132A (ja) | 車両および駆動装置並びにこれらの制御方法 | |
| JP2016168875A (ja) | 車両の制御装置 | |
| JP5792789B2 (ja) | 四輪車両のスリップ制御装置 | |
| JP6071954B2 (ja) | ハイブリッド車両の制御装置 | |
| JP7379527B2 (ja) | ハイブリッドシステム | |
| JP2009227051A (ja) | ハイブリッド車の制御装置 | |
| JP5963738B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4165475B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2016117353A (ja) | ハイブリッド車両 | |
| JP2015231797A (ja) | 動力伝達装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170706 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170822 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170825 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6200312 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |