JP6183799B2 - 車両制御システム - Google Patents
車両制御システム Download PDFInfo
- Publication number
- JP6183799B2 JP6183799B2 JP2013126114A JP2013126114A JP6183799B2 JP 6183799 B2 JP6183799 B2 JP 6183799B2 JP 2013126114 A JP2013126114 A JP 2013126114A JP 2013126114 A JP2013126114 A JP 2013126114A JP 6183799 B2 JP6183799 B2 JP 6183799B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- road
- control
- relative angle
- control system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 claims description 22
- 230000007423 decrease Effects 0.000 claims description 5
- 230000003111 delayed effect Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 description 58
- 230000008569 process Effects 0.000 description 55
- 230000000087 stabilizing effect Effects 0.000 description 32
- 238000011156 evaluation Methods 0.000 description 25
- 238000010586 diagram Methods 0.000 description 19
- 238000001514 detection method Methods 0.000 description 15
- 230000033228 biological regulation Effects 0.000 description 8
- 230000006641 stabilisation Effects 0.000 description 8
- 238000011105 stabilization Methods 0.000 description 8
- 238000003384 imaging method Methods 0.000 description 5
- 230000001629 suppression Effects 0.000 description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000009987 spinning Methods 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000006116 polymerization reaction Methods 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- NCGICGYLBXGBGN-UHFFFAOYSA-N 3-morpholin-4-yl-1-oxa-3-azonia-2-azanidacyclopent-3-en-5-imine;hydrochloride Chemical compound Cl.[N-]1OC(=N)C=[N+]1N1CCOCC1 NCGICGYLBXGBGN-UHFFFAOYSA-N 0.000 description 1
- 241000196324 Embryophyta Species 0.000 description 1
- 239000010426 asphalt Substances 0.000 description 1
- 239000011384 asphalt concrete Substances 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
- B60T8/17552—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve responsive to the tire sideslip angle or the vehicle body slip angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/103—Side slip angle of vehicle body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/114—Yaw movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2260/00—Interaction of vehicle brake system with other systems
- B60T2260/02—Active Steering, Steer-by-Wire
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
- B60W2710/202—Steering torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/20—Sideslip angle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Description
図1は、実施例1の車両制御システムを表す概略構成図である。
実施例1の車両は、走行環境認識システム1、電動パワーステアリング2、油圧ブレーキユニット3、ブレーキブースタ4、ステアリングホイール5、左前輪6、右前輪7、左後輪8、右後輪9、電子制御ユニット10および車両運動検出センサ11を備える。
走行環境認識システム1は、自車両の車室内前方かつ上方のバックミラー付近であって略中央位置に取り付けられたステレオカメラ310a,310bを用い、自車両の前方を撮像して走行環境のデータを作成する。
ブレーキブースタ4は、ブレーキペダルによって作動するマスタシリンダ内のピストンに対し、運転者のブレーキ踏力を倍力してピストンストローク力を電気的にアシストする倍力装置である。ブレーキブースタ4によって倍力された力によってマスタシリンダ圧が発生し、油圧ブレーキユニット3へ出力する。尚、電気的にアシストする構成に限らず、エンジンの負圧を用いた負圧ブースタであってもよく特に限定しない。
電子制御ユニット10は、車両運動検出センサ11の各検出値に基づいて、走行環境認識システム1、電動パワーステアリング2、油圧ブレーキユニット3を制御する。電子制御ユニット10は、走行環境認識システム1の撮像画像から認識した道路における走行路を規定する走行路規定線と自車両の進行方向とが交差している場合には、電動パワーステアリング2及び/又は油圧ブレーキユニット3を駆動し、車両にヨーモーメント及び/又は減速度を付与して車両の進行方向と車線とが平行となるように車両姿勢スタビライジング制御を行う。ここで、「走行路規定線」とは、センターラインや、白線を認識している場合には車線境界線であり、ガードレールを認識している場合にはガードレールが設置されている位置を結ぶ線であり、土手道路の平らな部分と斜面部分との境界を示す線等である(以下、単に路端とも称す。)。尚、車両姿勢スタビライジング制御の詳細については後述する。
油圧ブレーキユニット3は、運転者のブレーキ操作力によって駆動される場合には、左右前輪6,7および左右後輪8,9にそれぞれ等しい制動力を作用させる。一方、車両姿勢スタビライジング制御では、左右前輪6,7および左右後輪8,9の制動力に差を付けて左右制動力を発生させることで車両にヨーモーメントを付与する。
図2は、実施例1の電子制御ユニット10の制御ブロック図である。電子制御ユニット10は、逸脱傾向算出部20と車両姿勢スタビライジング制御部21とを備える。逸脱傾向算出部20は、車両の走行車線からの逸脱傾向を算出し、車両姿勢スタビライジング制御部21は、逸脱傾向算出部20によって車両の走行車線からの逸脱傾向を検出したとき電動パワーステアリング2及び/又は油圧ブレーキユニット3を駆動し、車両に対してヨーモーメント及び/又は減速度を付与して逸脱傾向を抑制する。車両姿勢スタビライジング制御部21は、自車両から進行方向に延びる進行方向仮想線と、この進行方向仮想線と走行路規定線とが交差する位置における走行路規定線の接線方向である仮想走行路規定線とによって生じる角度(以下、なす角θと記載する。)と、自車両の旋回状態とに基づいて自車両が走行路規定線と平行となるように制御する。
逸脱傾向算出部20は、走行路規定線認識部22と、車両現在位置認識部23と、交差時間算出部24と、仮想走行路規定線算出部25と、作動要否判定部26とを有する。
車両現在位置認識部23は、自車両の進行方向前方の車両端部である車両現在位置を認識すると共に、車両現在位置から自車両の進行方向に向けて進行方向仮想線を認識する。この進行方向前方の車両端部は、自車両の略中央位置を車両現在位置としてもよいし、自車両進行方向が右側の走行路規定線と交差する場合は自車両前方の右側位置を、左側の走行路規定線と交差する場合は自車両前方の左側位置を車両現在位置としてもよいし、実際の車両端部位置よりも余裕を持って設定した位置を車両現在位置としてもよく、特に限定しない。
交差時間算出部24は、自車両が、現在の車速で、車両現在位置から進行方向仮想線と走行路規定線との交差位置に到達するまでの時間である交差時間を演算する。
仮想走行路規定線算出部25は、走行路規定線と進行方向仮想線との交差位置における走行路規定線の接線方向の線である仮想走行路規定線を算出する。仮想走行路規定線は、自車両の進行方向において複数交差する場合には、自車両からもっとも近い位置で交差した点における接線方向を算出する。
作動要否判定部26は、交差時間に基づいて、車両姿勢スタビライジング制御の作動要否、つまり、車両姿勢スタビライジング制御の制御介入をすべきか否かを判定する。具体的には、交差時間が予め設定された所定時間以上か否かを判断し、所定時間以上であれば、安全性が確保されており、特に制御介入する必要はなく、車両姿勢スタビライジング制御が不要と判定する。一方、交差時間が所定時間未満の場合は車両姿勢スタビライジング制御が必要と判定する。
車両姿勢スタビライジング制御部21は、作動要否判定部26により車両姿勢スタビライジング制御が必要と判定された場合には車両姿勢スタビライジング制御を実行し、不要と判定された場合には車両姿勢スタビライジング制御を実行しない。
次に、走行路規定線の認識にかかる詳細について説明する。図3は実施例1の走行環境認識システムの構成を表すブロック図である。走行環境認識システム1は、撮像手段として一対のカメラ310a及び310bから構成されたステレオカメラ310が備えられ、車両周囲の環境を認識する。実施例1の場合は、車両中心から車幅方向に同一距離だけ離れた位置にそれぞれのカメラが設置されている。このとき、カメラは3つ以上備えていても良い。尚、実施例1では、走行環境認識システム1においてカメラの撮像画像を処理する構成について説明するが、画像処理等を他のコントローラで行っても良い。
Z=(B×f)/δ
走行環境認識システム1には、撮像画像を記憶するRAM320と、演算処理を行うCPU330と、データを記憶するデータROM340と、認識処理プログラムが記憶されたプログラムROM350とを有する。また、ステレオカメラ310は車室内のルームミラー部に取り付けられ、自車両前方の様子を所定の俯角、取り付け位置で撮像するように構成されている。ステレオカメラ310により撮像された自車両前方の画像(以下、撮像画像と記載する。)は、RAM32に取り込まれ、自車両前方の車線及び立体物を検出すると共に、道路形状を推定する。
ステップ201では、左側に配置されたカメラ310aの画像の入力処理を行う。
ステップ202では、右側に配置されたカメラ310bの画像の入力処理を行う。
ステップ203では、撮像された対応点の算出処理を行う。
ステップ204では、算出された対応点までの距離算出処理を行う。
ステップ205では、距離情報の出力処理を行う。
ステップ206では、画像入力信号の有無を判断し、画像入力信号がある場合にはステップ201に戻って本フローを繰り返し、画像入力信号が無い場合には演算処理を終了して待機する。
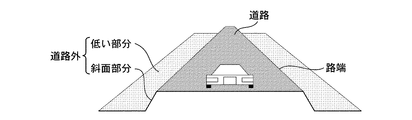
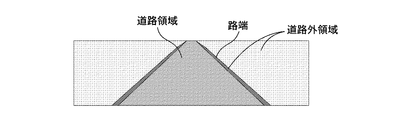
ここで、道路外(自車両が走行している道路の両脇等)が路面より低くなっている場合における画像処理について説明する。図5は急峻な斜面部分を有する土手道路を模式的に示す概略図である。この土手道路は、道路が断面略台形状の上辺部分に形成され、道路と道路外の領域との間には、斜面部分が形成され、その更に外側に低い部分が存在している場合を示す。以下、道路のことを路面とも記載する。図6は急峻な斜面部分を有する土手道路を自車両から撮像した際の映像を模式的に示す撮像画像である。この撮像画像では、走行路規定線である路端と道路外(道路面より低くなっている領域)とは隣接して撮影される。この道路の場合、斜面の角度がステレオカメラ310の俯角より大きな角度を持つ(急峻な斜面)ため死角(撮影されない部分)が生じ、画面上においては斜面部分が撮影されず、路端と低い部分とが隣接して撮像される。そこで、画面上で道路領域とそれ以外の低い部分を表す領域とを検出し、両者の領域の画面上における境界のうち、道路側を実際の道路端として抽出することで、実際の道路環境に合致した検出を行う。
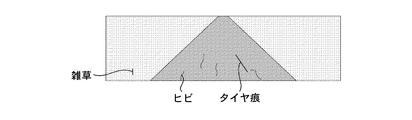
道路や道路外の領域が視覚的に完全に均質である場合、二つのカメラで撮像されたそれぞれの画像内において、同一の領域である箇所を抽出するということが困難となる。図7は実際の道路を撮像した際に同時に撮影される特徴点を表す概略図である。図7に示すように、実際の道路では、舗装に用いられるアスファルトコンクリートの粒や、路面表示、舗装の継ぎ目、舗装に入ったヒビ、走行車両によるタイヤ痕、舗装路でない場合であっても轍といった視覚的に特徴的な部分が随所に存在する。また、道路より低い領域においても、雑草などの視覚的に特徴的な部分が随所に存在する。すなわち、車両の走行に供するために舗装や整地などの処理を施した路面と、そのような処置を行っていない路面より低い域とでは視覚的に差異があり、その境界部分が視覚的に特徴的と成る可能性が高い。
路面形状はステレオカメラ310により撮像された自車両前方の画像から道路標示の他路面に存在するアスファルトの細かいヒビやタイヤ痕といった画面上の特徴的な部分を抽出し、二つのカメラの撮像画像における画面上での位置ずれにより当該部分の距離を計測する。しかしながら、このような特徴的部分は路面の全体に満遍なく存在するとは限らず、また、存在したとしても常時検出可能か否かは不明である。同様に、路面より低い領域においても、その領域の各所で特徴的な部分が常に検出可能とは限らない。よって、更なる精度の向上を図る必要がある。そこで、得られた距離データをデータROM340内に蓄積し、次回以降のタイミングで撮影された画像により得られるデータとの重合を行う。
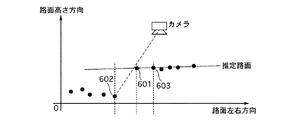
図9は土手道路を撮像して認識した結果を道路横断方向で表す模式図である。この場合、斜面部分が急峻であり、カメラの死角に存在しているため、撮像画像内には映らず、映像内では道路部分と道路より低い部分が直接接しているように見えている。しかしながら、画面上では隣接している道路の端部の点601と道路外の点602は、実際には図9に示すように隣接しておらず、若干離れた位置に存在していることが分かる。したがって、路端の点を点602の位置として出力することは不正確となるため、点601を路端の点として出力する。
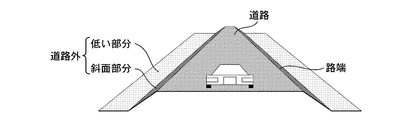
図10は緩やかな斜面部分を有する土手道路を模式的に示す概略図である。この土手道路は、道路が断面略台形状の上辺部分に形成され、道路と道路外の領域との間には、斜面部分が形成され、その更に外側に低い部分が存在している場合を示す。図11は緩やかな斜面部分を有する土手道路を自車両から撮像した際の映像を模式的に示す撮像画像である。この撮像画像では、路端と斜面部分とが隣接して撮影され、斜面部分と道路外(道路面より低くなっている領域)とが隣接して撮影される。この道路の場合、斜面の角度がステレオカメラ310の俯角より小さな角度を持つ(緩やかな斜面)ため死角(撮影されない部分)は生じない。
尚、道路と道路外との間が緩やかな勾配で接続されている場合においては、この勾配部をステレオカメラ310で撮像することができ、その距離情報を取得することができる。これにより、この勾配部分は車両の通行に適さない斜面部分であることが検出可能であり、この勾配部分と道路部分との境界を道路境界(すなわち路端)とみなすことができる。
また、例えば、断崖絶壁の道路である場合や、道路下領域のコントラストがあいまいである場合など、道路より低い領域の高さが著しく低く、この領域を検出することができない場合であっても、道路外であると認識できることに変わりは無い。
道路より低い領域の存在を抽出し、これを道路外と判断する場合、道路上に水溜りが生じ、これに反射する虚像を検出する場合、見かけ上、この虚像は路面より下に位置することから、水溜り領域が路面より低い領域であると誤認識するおそれがある。ここで、水溜りに写る虚像には、実像とは異なる特徴を持つことから、これを実際に路面より低い領域とは区別して排除する。具体的には、以下のような特徴が挙げられる。
a)虚像は遠方の物体が写り込んでいるため、画面上では虚像が存在する領域より遠方に虚像の見かけ上の距離より近傍となる路面領域が存在する。
b)水面が完全な平面でないことにより虚像は大きく歪んでいる場合があり、その結果水溜り領域の距離がばらつく
c)水面が安定しない場合、時間経過により虚像の見かけ上の位置が変化する
d)路上物体と路面(水面)を挟んで対象となる位置に物体が存在するように見える
e)走行車両の虚像である場合、路面より低い領域にあるにもかかわらず移動する
といった実像では起こる可能性の極めて低い特徴を有する。こうした特徴を検出することで、実像ではない、すなわち虚像であると判断できる。
図13は、実施例1の電子制御ユニット10で実行される車両姿勢スタビライジング制御要否判断処理を示すフローチャートである。この処理は、車両の走行中、例えば、10ms程度の演算周期で繰り返し実行される。
ステップS1では、車両姿勢スタビライジング制御部21において、車両運動検出センサ11から受信した車両の速度、前後加速度、横加速度、ヨーレイト、操舵角、操舵トルクなどの検出値を読み込む。
ステップS2では、走行路規定線認識部22において、走行環境認識システム1から受信した自車両前方の撮像画像から走行路規定線位置を認識する。
ステップS3では、車両現在位置認識部23において、自車両の進行方向前方の車両端部である車両現在位置を認識する。
ステップS5では、作動要否判定部26において、交差時間が所定時間未満か否かを判定し、所定時間未満の場合にはステップS6へ進み、所定時間以上の場合には処理を終了する。交差時間が所定時間よりも長いときは、実際に運転者が車両前方の走行路規定線に沿って操舵する場面よりも手前で制御量を与えてしまうと、運転者に違和感となるからである。
ステップS6では、車両姿勢スタビライジング制御部21において、ヨーモーメント制御量に基づく電動パワーステアリング2及び/又は油圧ブレーキユニット3を駆動してヨーモーメント及び/又は減速度を車両に付与し、車両姿勢スタビライジング制御を実行する。
次に、車両姿勢スタビライジング制御処理の詳細について説明する。図14は自車両が走行路規定線に向かって旋回している場合を表す概略図である。図14は、直進路を走行中に自車両が走行路規定線に向かう方向に旋回している状態を示す。自車両のヨーレイトdφ/dtの符合は、右旋回状態を正、左旋回状態を負、走行路規定線と平行な状態を0と定義する。このとき、図14に示す場合におけるヨーレイトdφ/dtとなす角θとの関係を見ると、ヨーレイトdφ/dtは左旋回であるから負に変化し、θは正に変化するため、ヨーレイトdφ/dtとθの符合は不一致となる。
(dφ/dt)=V/r
以上から
1/r=(dφ/dt)/V
と表される。ここで、(1/r)は曲率であり、車速によらず旋回状態を表すことができる値であるため、なす角θと同様に扱える。
Ho(t)=A{(dφ/dt)/V}(t)−Bθ(t)
ここで、A,Bは定数である。
この評価関数Ho(t)は、自車両が走行している旋回状態[A{(dφ/dt)/V}(t)]と、実際の走行路規定線の状態との差分に応じて付与すべきヨーモーメント制御量を表す。右旋回中に評価関数Ho(t)が正で大きな値を示す場合は、左旋回ヨーモーメントを付与する必要があることから、左側輪に制動力を付与する、もしくは左側に旋回しやすくするような操舵トルク制御を行えばよい。一方、左旋回中に評価関数Ho(t)が負で絶対値が大きな値を示す場合は、右旋回ヨーモーメントを付与する必要があることから、右側輪に制動力を付与する、もしくは右側に旋回しやすくするような操舵トルク制御を行えばよい。
ステップS101では、自車両の進行方向と走行路規定線とのなす角θを演算する。
ステップS102では、自車両のヨーレイト(dφ/dt)を演算する。このヨーレイトは車両運動検出センサ11により検出されたヨーレイトセンサ値でもよいし、車両運動モデルに基づいて車速や操舵角から演算してもよく、特に限定しない。
ステップS104では、評価関数Ho(t)が正か否かを判断し、正の場合はステップS105へ進み、0以下の場合はステップS108へ進む。
ステップS105では、評価関数Ho(t)が予め設定された不感帯を表す所定値δより大きいか否かを判断し、大きいときはステップS106へ進み、δ未満のときはステップS107へ進む。
ステップS106では、制御量H(t)を評価関数Ho(t)から所定値δを差し引いた値に設定する。図18は評価関数Ho(t)と所定値δとの関係を表す概略図である。評価関数Ho(t)が所定値δを超えた分の値が制御量H(t)として演算される。
ステップS107では、制御量H(t)を0にセットする。
ステップS108では、評価関数Ho(t)にマイナスを掛けた値(評価関数Ho(t)は負の値であり、マイナスを掛けると正値となる。)が所定値δより大きいか否かを判断し、大きいときはステップS109へ進み、δ未満のときはステップS110へ進む。
ステップS109では、制御量H(t)を評価関数Ho(t)に所定値δを加算した値に設定する。
ステップS110では、制御量H(t)を0にセットする。
ステップS112では、右旋回を抑制する必要があると判断できるため、右側輪基本制御量TRを0に設定し、左側輪基本制御量TLをH(t)に設定する。
ステップS113では、左旋回を抑制する必要があると判断できるため、右側輪基本制御量をH(t)に設定し、左側輪基本制御量TLを0に設定する。
ステップS114では、以下の関係式に基づいて各輪制動トルクを算出する。
右前輪制動トルクTFR=TR×α
右後輪制動トルクTRR=TR−TFR
左前輪制動トルクTFL=TL×α
左後輪制動トルクTRL=TL−TFL
ただし、αは定数であり、前後ブレーキ配分に基づいて設定される値である。
右前輪ホイルシリンダ液圧PFR=K×TFR
左前輪ホイルシリンダ液圧PFL=K×TFL
右後輪ホイルシリンダ液圧PRR=L×TRR
左後輪ホイルシリンダ液圧PRL=L×TRL
ただし、K,Lは定数であり、トルクを液圧に変換する変換定数である。
ステップS122では、ステアリングホイールに手が添えられているか否かを判断し、添えられていると判断した場合はステップS125に進み、手放し状態と判断した場合はステップS123に進む。手が添えられているか否かは、例えばトルクセンサの共振周波数成分によりステアリングホイールのイナーシャを分析することで確認してもよいし、ステアリングホイールにタッチセンサ等を設けて手が添えられていることの判断を行ってもよい。
次に、ステップS121において通常走行状態か否かを判断する際に用いるスピンフラグの設定処理について説明する。このスピン判断は、先行車両と自車両との関係に基づいてスピン状態を判定するものである。
図22は実施例1のスピン状態判断処理を表すフローチャートである。
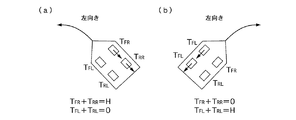
ステップS201では、自車両と先行車両との間の距離Lと、先行車両の中心と自車両の進行方向仮想線からの距離Dをステレオカメラ310の撮像画像に基づいて算出する。図23は自車両と先行車両との位置関係を表す概略図である。図23に示すように、実施例1では、自車両の前方位置略中央部と、先行車両の後方位置略中央部との間の距離をLとして算出し、自車両の進行方向仮想線と先行車両の後方位置略中央部との間の距離をDとして算出する。尚、自車両の位置として前方に限らず重心位置等を用いてもよいし、先行車両の位置も後方位置に限らず重心位置や旋回中心と推定される位置等を用いてもよく、特に限定しない。
ステップS203では、自車両と先行車両との関係に基づく相対角γを下記式より算出する(図23参照)。
γ=sin-1(D/L)
ステップS204では、参考にならない先行車両との関係であるため、γ=0にセットする。
ステップS205では、ウインカーがONか否かを判断し、ONの場合は車線変更する場合であると考えられ、運転者の意図により先行者との相対的な関係を変更している状態であるため、ステップS206に進んで相対角γを0にセットし、ウインカーがOFFの場合はステップS207に進む。
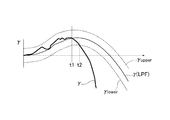
ステップS208では、γ(LPF)にΔγを加算してスピン判断閾値の上限値γupperを算出し、γ(LPF)からΔγを減算してスピン判断閾値の下限値γlowerを算出する。
ステップS209では、相対角γがスピン判断閾値の範囲内(γlower以上、γupper以下)か否かを判断し、この範囲内の場合はステップS210に進んでスピンフラグをOFFとする。一方、γがスピン判断閾値の範囲を超えた場合はスピンが発生したと判断してステップS211に進み、スピンフラグをONとする。
ステップS301では、スピンフラグがONか否かを判断し、ONの場合はスピンが発生していると判断してステップS302へ進み、スピンフラグがOFFの場合は本制御フローを終了する。
ステップS302では、右旋回状態か否かを判断し、右旋回状態であればステップS303へ進み、左旋回状態であればステップS304へ進む。
ステップS303では、右旋回状態であることから、左側に操舵をすることでカウンターステアを当てやすくするために、左操舵アシストトルクを通常のアシストトルクに比べて大きくし、右操舵アシストトルクを通常のアシストトルクに比べて小さくする。これにより、運転者がカウンターステアを当てやすい状態を実現することで、車両安定性を確保する。ここで、「カウンターステアを当てる」とは、車両のヨー運動を抑制するために旋回方向とは反対側に所定の操舵角を付与することを意味する(ヨーモーメント制御に相当)。
ステップS304では、左旋回状態であることから、右側に操舵をすることでカウンターステアを当てやすくするために、右操舵アシストトルクを通常のアシストトルクに比べて大きくし、左操舵アシストトルクを通常のアシストトルクに比べて小さくする。これにより、運転者がカウンターステアを当てやすい状態を実現することで、車両安定性を確保する。
(1)自車両と先行車両との距離Lと、自車両から進行方向に延びる進行方向仮想線から先行車両までの距離Dとに基づいて、先行車両と自車両との相対角γを演算するステップS203(相対角演算部)と、
相対角γに所定の遅れをもって出力された遅れ相対角であるγ(LPF)に基づいてスピン判断閾値γupper及びγlowerを設定するステップS208(スピン判断閾値設定部)と、
相対角γがスピン判断閾値を越えたときは、相対角γとγ(LPF)との偏差が減少するようにヨーモーメントを制御するスピン抑制制御処理(ヨーモーメント制御部)と、
を備えたことを特徴とする車両制御システム。
よって、ゆっくりとスピンするような場合であっても、スピン状態を認識できるため、確実にヨーモーメント制御を開始することができ、車両挙動の安定性を確保できる。また、先行車両との関係に基づいて相対角を算出するため、走行路規定線の形状等によらず安定した値に基づいてスピン状態を判断できる。
電動パワーステアリング2は、スピンフラグがONのときは、相対角γとγ(LPF)との偏差が減少する側へのアシストトルクを通常のアシストトルク(所定アシストトルク)より大きく制御し、上記偏差が増大する側へのアシストトルクを通常のアシストトルク(所定アシストトルク)より小さく制御することを特徴とする車両制御システム。
これにより、運転者の操舵操作を許容しつつ、より先行車両の動きに沿った、言い換えると、走行路規定線に平行となるような操舵状態に誘導することができ、運転者に違和感を与えることなく安全性を確保できる。尚、実施例1では電動パワーステアリング2を備えた構成を示したが、ステアバイワイヤシステムを搭載した車両にあっては、反力モータの制御によって操舵反力トルクを制御し、カウンターステアを当てやすい状態へ誘導してもよい。
よって、車両前方の距離や前方障害物を立体的に把握することができ、ヨーレイトセンサ等の車両運動を直接検出するセンサでは検知が困難なゆっくりとしたスピン状態であっても、画像認識に基づいてスピン状態を検出できるため、安全性の高い制御が実現できる。
次に、実施例2について説明する。基本的な構成は実施例1と同じであるため、異なる点について説明する。実施例1では、車両姿勢スタビライジング制御を行う中で、低車速領域にあっては、ブレーキ制御によるヨーモーメント制御は行わず、主に効果的に機能するステアリング制御によってスピン発生時のスピン抑制制御処理を行った。これに対し、実施例2では、車両姿勢スタビライジング制御とは別に、油圧ブレーキユニット3に供えられた車両挙動制御を用い、スピン発生時のスピン抑制制御を行う点が異なる。
ステップS501では、スピンフラグがONか否かを判断し、ONと判断した場合はスピンが発生していると判断してステップS502へ進み、それ以外の場合はステップS503へ進む。
ステップS502では、VDC制御開始閾値を小さな値に補正する。
ステップS503では、VDC制御開始閾値をリセットし、当初の値に戻す。
(5)実ヨーレイト(車両運動状態)と目標ヨーレイト(目標車両運動状態)との差が制御開始閾値以上のときは、目標ヨーレイトとなるように各輪の制動力を制御してヨーモーメント制御を行うVDC(車両運動制御部)を有し、
ステップS505に示すように、相対角γがスピン判断閾値を越えたときは、VDCの制御開始閾値が小さくなるように補正するステップS502(制御開始閾値補正部)を備えたことを特徴とする車両制御システム。
よって、ゆっくりとスピンするような場合であっても、スピン状態を認識できるため、積極的にVDCによる車両挙動制御を実行でき、車両挙動の安定性を確保できる。
2 電動パワーステアリング
3 油圧ブレーキユニット
4 ブレーキブースタ
5 ステアリングホイール
10 電子制御ユニット
11 車両運動検出センサ
20 逸脱傾向算出部
21 車両姿勢スタビライジング制御部
22 走行路規定線認識部
24 交差時間算出部
25 仮想走行路規定線算出部
26 作動要否判定部
310 ステレオカメラ
Claims (5)
- 自車両の正面方向に延びる進行方向仮想線と、先行車両と自車両とを結ぶ線とのなす角である相対角を演算する相対角演算部と、
前記相対角に所定の遅れをもって出力された遅れ相対角に基づいてスピン判断閾値を設定するスピン判断閾値設定部と、
前記相対角が前記スピン判断閾値を越えたときは、前記相対角と前記遅れ相対角との偏差が減少するようにヨーモーメントを制御するヨーモーメント制御部と、
を備えたことを特徴とする車両制御システム。 - 請求項1に記載の車両制御システムにおいて、
運転者の操舵トルクに所定アシストトルクを付与するアシストトルク制御部を有し、
前記ヨーモーメント制御部は、前記相対角が前記スピン判断閾値を越えたときは、前記偏差が減少する側へのアシストトルクを前記所定アシストトルクより大きく制御し、前記偏差が増大する側へのアシストトルクを前記所定アシストトルクより小さく制御することを特徴とする車両制御システム。 - 請求項1または2記載の車両制御システムにおいて、
車両運動状態と目標車両運動状態との差が制御開始閾値以上のときは、目標ヨーレイトとなるように各輪の制動力を制御してヨーモーメント制御を行う車両運動制御部を有し、
前記ヨーモーメント制御部は、前記相対角が前記スピン判断閾値を越えたときは、前記制御開始閾値が小さくなるように補正する制御開始閾値補正部と、
を備えたことを特徴とする車両制御システム。 - 請求項1ないし3いずれか一つに記載の車両制御システムにおいて、
前記スピン判断閾値設定部は、前記相対角にローパスフィルタを通過させたフィルタ値に所定値を加算もしくは減算した値をスピン判断閾値として設定することを特徴とする車両制御システム。 - 請求項1ないし4いずれか一つに記載の車両制御システムにおいて、
前記相対角演算部は、複数のカメラが同一の対象物を撮影したときに発生する視差を利用して距離を計測するステレオカメラであることを特徴とする車両制御システム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013126114A JP6183799B2 (ja) | 2013-06-14 | 2013-06-14 | 車両制御システム |
| DE112014002816.9T DE112014002816B4 (de) | 2013-06-14 | 2014-06-03 | Fahrzeugsteuersystem |
| US14/896,747 US9969384B2 (en) | 2013-06-14 | 2014-06-03 | Vehicle control system |
| PCT/JP2014/064676 WO2014199868A1 (ja) | 2013-06-14 | 2014-06-03 | 車両制御システム |
| KR1020157032162A KR101812863B1 (ko) | 2013-06-14 | 2014-06-03 | 차량 제어 시스템 |
| CN201480031879.4A CN105263776B (zh) | 2013-06-14 | 2014-06-03 | 车辆控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013126114A JP6183799B2 (ja) | 2013-06-14 | 2013-06-14 | 車両制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015000655A JP2015000655A (ja) | 2015-01-05 |
| JP6183799B2 true JP6183799B2 (ja) | 2017-08-23 |
Family
ID=52022166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013126114A Active JP6183799B2 (ja) | 2013-06-14 | 2013-06-14 | 車両制御システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9969384B2 (ja) |
| JP (1) | JP6183799B2 (ja) |
| KR (1) | KR101812863B1 (ja) |
| CN (1) | CN105263776B (ja) |
| DE (1) | DE112014002816B4 (ja) |
| WO (1) | WO2014199868A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2627262C2 (ru) * | 2013-06-28 | 2017-08-04 | Ниссан Мотор Ко., Лтд. | Устройство управления рулением |
| US10000124B2 (en) * | 2015-11-04 | 2018-06-19 | Zoox, Inc. | Independent steering, power, torque control and transfer in vehicles |
| US9802661B1 (en) | 2015-11-04 | 2017-10-31 | Zoox, Inc. | Quadrant configuration of robotic vehicles |
| JP6109998B1 (ja) * | 2016-03-07 | 2017-04-05 | 先進モビリティ株式会社 | 車両位置認識システム |
| KR102638977B1 (ko) | 2016-12-15 | 2024-02-22 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| CN110177729B (zh) * | 2017-01-20 | 2021-06-08 | 三菱电机株式会社 | 自动转向控制装置及自动转向控制方法 |
| JP6927630B2 (ja) * | 2017-03-21 | 2021-09-01 | 株式会社Ihiエアロスペース | 凹型障害物検出装置と方法 |
| DE102017206535B4 (de) | 2017-04-18 | 2019-06-27 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Betreiben eines Kraftfahrzeugs mit einem Lenksystem und einem Bremssystem sowie ein Kraftfahrzeug |
| US10407014B2 (en) * | 2017-05-10 | 2019-09-10 | Ford Global Technologies, Llc | Vehicle underride impact detection systems and methods |
| EP3413082B1 (en) * | 2017-06-09 | 2020-01-01 | Veoneer Sweden AB | A vehicle system for detection of oncoming vehicles |
| JP6944125B2 (ja) * | 2017-11-17 | 2021-10-06 | トヨタ自動車株式会社 | 車両の挙動制御装置 |
| EP3540710A1 (en) * | 2018-03-14 | 2019-09-18 | Honda Research Institute Europe GmbH | Method for assisting operation of an ego-vehicle, method for assisting other traffic participants and corresponding assistance systems and vehicles |
| JP7147546B2 (ja) * | 2018-12-25 | 2022-10-05 | トヨタ自動車株式会社 | 車両のスリップ角推定装置 |
| CN111523471B (zh) * | 2020-04-23 | 2023-08-04 | 阿波罗智联(北京)科技有限公司 | 车辆所在车道的确定方法、装置、设备以及存储介质 |
| JP7409266B2 (ja) * | 2020-09-08 | 2024-01-09 | トヨタ自動車株式会社 | 轍判定装置、轍判定方法、プログラム |
| CN114248831A (zh) * | 2020-09-25 | 2022-03-29 | 本田技研工业株式会社 | 电动转向装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3913295B2 (ja) * | 1996-09-30 | 2007-05-09 | 本田技研工業株式会社 | 自動追従システム |
| JP3316813B2 (ja) * | 1997-09-13 | 2002-08-19 | 本田技研工業株式会社 | 車両用操舵装置 |
| JP3997837B2 (ja) * | 2002-05-27 | 2007-10-24 | 株式会社デンソー | 車載レーダ装置、プログラム |
| JP2004345460A (ja) | 2003-05-21 | 2004-12-09 | Koyo Seiko Co Ltd | 自動操舵システム |
| JP2005112007A (ja) * | 2003-10-02 | 2005-04-28 | Toyoda Mach Works Ltd | 車両の統合制御装置 |
| JP2005178622A (ja) * | 2003-12-19 | 2005-07-07 | Denso Corp | 車両用安全制御装置 |
| JP4375161B2 (ja) * | 2004-08-18 | 2009-12-02 | 株式会社豊田中央研究所 | 車両安定化制御装置 |
| JP4229051B2 (ja) * | 2004-11-26 | 2009-02-25 | 日産自動車株式会社 | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| CN100486845C (zh) * | 2004-12-27 | 2009-05-13 | 日产自动车株式会社 | 车道偏离防止系统 |
| DE102005042989B3 (de) | 2005-05-31 | 2006-08-24 | Daimlerchrysler Ag | Verfahren zur Erkennung eines bevorstehenden Unfalls aufgrund eines Schleudervorgangs bei einem vorausfahrenden Fahrzeug |
| JP4648283B2 (ja) * | 2006-10-12 | 2011-03-09 | 本田技研工業株式会社 | 車両制御装置 |
| JP5297722B2 (ja) | 2008-08-28 | 2013-09-25 | ライオン株式会社 | 歯ブラシ用毛材の製造方法、歯ブラシ用毛材、歯ブラシ |
| JP2010076539A (ja) * | 2008-09-25 | 2010-04-08 | Fuji Heavy Ind Ltd | 車両逸脱防止装置 |
| WO2010050344A1 (ja) * | 2008-10-28 | 2010-05-06 | 株式会社アドヴィックス | 車両の走行制御装置 |
| JP5349078B2 (ja) * | 2009-02-27 | 2013-11-20 | アルパイン株式会社 | 前方車両横移動警告装置 |
| JP5595078B2 (ja) * | 2010-03-16 | 2014-09-24 | ダイハツ工業株式会社 | 運転支援装置 |
| JP5672971B2 (ja) * | 2010-10-29 | 2015-02-18 | 株式会社アドヴィックス | 車両運動制御装置 |
| JP5429234B2 (ja) * | 2011-03-23 | 2014-02-26 | トヨタ自動車株式会社 | 車両用情報処理装置 |
| JP2012224316A (ja) * | 2011-04-22 | 2012-11-15 | Mitsubishi Motors Corp | 走行制御装置 |
| JP2013126114A (ja) | 2011-12-14 | 2013-06-24 | Samsung Yokohama Research Institute Co Ltd | ステレオ画像処理方法及びステレオ画像処理装置 |
-
2013
- 2013-06-14 JP JP2013126114A patent/JP6183799B2/ja active Active
-
2014
- 2014-06-03 DE DE112014002816.9T patent/DE112014002816B4/de active Active
- 2014-06-03 CN CN201480031879.4A patent/CN105263776B/zh active Active
- 2014-06-03 US US14/896,747 patent/US9969384B2/en active Active
- 2014-06-03 WO PCT/JP2014/064676 patent/WO2014199868A1/ja active Application Filing
- 2014-06-03 KR KR1020157032162A patent/KR101812863B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| DE112014002816B4 (de) | 2022-06-02 |
| WO2014199868A1 (ja) | 2014-12-18 |
| US9969384B2 (en) | 2018-05-15 |
| JP2015000655A (ja) | 2015-01-05 |
| CN105263776B (zh) | 2018-09-11 |
| KR20150140806A (ko) | 2015-12-16 |
| CN105263776A (zh) | 2016-01-20 |
| US20160137195A1 (en) | 2016-05-19 |
| DE112014002816T5 (de) | 2016-03-10 |
| KR101812863B1 (ko) | 2017-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6183799B2 (ja) | 車両制御システム | |
| JP6035207B2 (ja) | 車両制御システム | |
| JP6108974B2 (ja) | 車両制御システム | |
| JP6049541B2 (ja) | 車両制御システム | |
| JP6049542B2 (ja) | 車両制御システム | |
| JP5080602B2 (ja) | 車両制御装置 | |
| JP6308186B2 (ja) | 衝突回避支援装置 | |
| JP5389002B2 (ja) | 走行環境認識装置 | |
| US10717438B2 (en) | Lane keep assist device | |
| JP5890803B2 (ja) | 車両の運転支援制御装置 | |
| JP2015189404A (ja) | 車線維持制御装置 | |
| JP5510172B2 (ja) | 車両制御装置 | |
| JP5692324B2 (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170718 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6183799 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |