JP6172967B2 - 撮像装置、及びその制御方法 - Google Patents
撮像装置、及びその制御方法 Download PDFInfo
- Publication number
- JP6172967B2 JP6172967B2 JP2013031428A JP2013031428A JP6172967B2 JP 6172967 B2 JP6172967 B2 JP 6172967B2 JP 2013031428 A JP2013031428 A JP 2013031428A JP 2013031428 A JP2013031428 A JP 2013031428A JP 6172967 B2 JP6172967 B2 JP 6172967B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- exposure
- imaging
- unit
- images
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/741—Circuitry for compensating brightness variation in the scene by increasing the dynamic range of the image compared to the dynamic range of the electronic image sensors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration by the use of more than one image, e.g. averaging, subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6811—Motion detection based on the image signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/57—Control of the dynamic range
- H04N25/58—Control of the dynamic range involving two or more exposures
- H04N25/581—Control of the dynamic range involving two or more exposures acquired simultaneously
- H04N25/583—Control of the dynamic range involving two or more exposures acquired simultaneously with different integration times
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10141—Special mode during image acquisition
- G06T2207/10144—Varying exposure
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20208—High dynamic range [HDR] image processing
Description
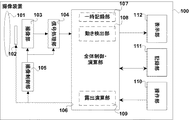
図1は、第1の実施形態に係る撮像装置100の構成を示すブロック図である。撮像装置100は、例えばデジタルカメラである。レンズ部101は、被写体からの光を撮像部103へ集光する。レンズ部101には、焦点距離変更部や、入射光を遮る遮光部等が含まれる。光量調整部102は、レンズ部101と撮像部103との間に配置され、例えば減光フィルタの挿入機構や絞り機構を含む。撮像部103は、レンズ部101と光量調整部102を通して入射した光をアナログ電気信号に変換する画素部と、アナログ電気信号をデジタル信号に変換するA/D変換回路等を含んでいる。
Diff = Σ|L2(x,y) - L1(x,y)| ・・・ 式(1)
に従って行われる。ここで、LN(x,y)は、N枚目のL画像の座標(x,y)の画素値を示す。従って、画像全体の差分Diffは、各画素の差分の総和である。
第1の実施形態では、同一面内でのHDR画像の生成が行われた。この場合、H画像及びL画像の取得タイミングの差が縮小するため、被写体に動きがある場合の画質の低下を抑制することができる。しかしながら、H画像及びL画像はそれぞれ撮像素子の異なる画素群から取得されるため、高周波の被写体に対しては、画質が低下する問題がある。そのため、動きの少ない被写体を撮影する際には、同じ画素群を用いて時間的に連続してH画像及びL画像を取得してHDR画像を生成した方が、画質の低下を抑制できる場合がある。そこで、第2の実施形態では、被写体の動きの程度に応じてHDR画像の生成の基となる画像を切り替える構成について説明する。なお、第2の実施形態において、撮像装置100の基本的な構成等は第1の実施形態と同様である(図1参照)。以下、主に第1の実施形態と異なる点について説明する。
被写体の動き検出結果に応じてHDR画像生成処理を面内で行うか面間で行うかを切り替える代わりに、各L画像の合成比率を変化させてもよい。例えば、撮像装置100は、図12に示すように、4枚のL画像を加重平均して合成することによって1枚の合成用L画像(合成画像)を生成し、これをH画像と合成してもよい。各L画像の重み係数(α、β、γ、θ)は、動き検出処理によって求められたS(動きのあるブロックの数)及びV(動きの方向)の関数である。この関数は、例えば、被写体の動きが大きいほどα及びβの値が大きくなるように設計される。
第1及び第2の実施形態では、HDR画像生成処理を面内で行う場合、複数のL画像のうちのいずれをH画像と合成してもよいものとして説明を行った。しかしながら、被写体に動きがある場合、複数のL画像はそれぞれ異なるため、どのL画像をH画像と合成するかに応じて、HDR画像の画質が変化する。そこで、第3の実施形態では、HDR画像生成処理を面内で行う場合にHDR画像の画質を向上させるように合成対象のL画像を選択する構成について説明する。なお、第3の実施形態において、撮像装置100の基本的な構成等は第1及び第2の実施形態と同様である(図1参照)。以下、主に第1及び第2の実施形態と異なる点について説明する。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (2)
- 被写体を撮像する撮像手段と、
1フレーム期間内に、前記撮像手段の第1の画素群を用いて第1の露光時間の撮像を行うことにより高露出画像を取得するとともに、前記撮像手段の第2の画素群を用いて前記第1の露光時間よりも短い露光時間の撮像を複数回行うことにより複数の低露出画像を取得する撮像制御手段と、
前記複数の低露出画像を比較することにより撮影間の被写体の動きの大きさと方向を検出する検出手段と、
前記高露出画像と、前記検出手段による検出結果に基づいて前記複数の低露出画像から選択された1の低露出画像を合成することにより、ハイダナミックレンジ(HDR)画像を生成する生成手段と、を備え、
前記生成手段は、前記検出手段によって前記撮影間の前記被写体の動きの方向が反転したことが検出された場合は、反転の前後における前記被写体の動きの大きさに応じて、合成に用いる低露出画像を選択することを特徴とする撮像装置。 - 被写体を撮像する撮像手段を備える撮像装置の制御方法であって、
前記撮像装置の撮像制御手段が、1フレーム期間内に、前記撮像手段の第1の画素群を用いて第1の露光時間の撮像を行うことにより高露出画像を取得するとともに、前記撮像手段の第2の画素群を用いて前記第1の露光時間よりも短い露光時間の撮像を複数回行うことにより複数の低露出画像を取得する撮像制御工程と、
前記撮像装置の検出手段が、前記複数の低露出画像を比較することにより撮影間の被写体の動きの大きさと方向を検出する検出工程と、
前記撮像装置の生成手段が、前記高露出画像と、前記検出手段による検出結果に基づいて前記複数の低露出画像から選択された1の低露出画像を合成することにより、ハイダイナミックレンジ(HDR)画像を生成する生成工程と、
を備え、
前記生成工程では、前記検出手段によって前記撮影間の前記被写体の動きの方向が反転したことが検出された場合は、反転の前後における前記被写体の動きの大きさに応じて、合成に用いる低露出画像を選択することを特徴とする制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013031428A JP6172967B2 (ja) | 2013-02-20 | 2013-02-20 | 撮像装置、及びその制御方法 |
| US14/175,479 US9160934B2 (en) | 2013-02-20 | 2014-02-07 | Image capturing apparatus obtaining high-exposure and low-exposure images, and method for controlling the same |
| CN201410058861.5A CN104010128B (zh) | 2013-02-20 | 2014-02-20 | 摄像设备及其控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013031428A JP6172967B2 (ja) | 2013-02-20 | 2013-02-20 | 撮像装置、及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014160987A JP2014160987A (ja) | 2014-09-04 |
| JP2014160987A5 JP2014160987A5 (ja) | 2016-03-31 |
| JP6172967B2 true JP6172967B2 (ja) | 2017-08-02 |
Family
ID=51350914
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013031428A Expired - Fee Related JP6172967B2 (ja) | 2013-02-20 | 2013-02-20 | 撮像装置、及びその制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9160934B2 (ja) |
| JP (1) | JP6172967B2 (ja) |
| CN (1) | CN104010128B (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9633426B2 (en) | 2014-05-30 | 2017-04-25 | General Electric Company | Remote visual inspection image capture system and method |
| US9936143B2 (en) | 2007-10-31 | 2018-04-03 | Google Technology Holdings LLC | Imager module with electronic shutter |
| US9392322B2 (en) | 2012-05-10 | 2016-07-12 | Google Technology Holdings LLC | Method of visually synchronizing differing camera feeds with common subject |
| JP5889247B2 (ja) * | 2013-07-02 | 2016-03-22 | キヤノン株式会社 | 画像処理装置、画像処理方法及び画像処理プログラム、並びに撮像装置 |
| KR102106537B1 (ko) * | 2013-09-27 | 2020-05-04 | 삼성전자주식회사 | 하이 다이나믹 레인지 영상 생성 방법 및, 그에 따른 장치, 그에 따른 시스템 |
| JP5904673B2 (ja) * | 2013-09-27 | 2016-04-20 | 富士フイルム株式会社 | 撮像装置及び内視鏡装置 |
| US8830367B1 (en) | 2013-10-21 | 2014-09-09 | Gopro, Inc. | Frame manipulation to reduce rolling shutter artifacts |
| JP6070599B2 (ja) * | 2014-02-18 | 2017-02-01 | ソニー株式会社 | 情報処理装置、情報処理方法、情報処理システム、および撮像装置 |
| US9357127B2 (en) * | 2014-03-18 | 2016-05-31 | Google Technology Holdings LLC | System for auto-HDR capture decision making |
| CN106134181B (zh) * | 2014-03-24 | 2019-03-01 | 富士胶片株式会社 | 摄影装置 |
| US9774779B2 (en) | 2014-05-21 | 2017-09-26 | Google Technology Holdings LLC | Enhanced image capture |
| US9571727B2 (en) | 2014-05-21 | 2017-02-14 | Google Technology Holdings LLC | Enhanced image capture |
| US9813611B2 (en) | 2014-05-21 | 2017-11-07 | Google Technology Holdings LLC | Enhanced image capture |
| US9729784B2 (en) | 2014-05-21 | 2017-08-08 | Google Technology Holdings LLC | Enhanced image capture |
| US9413947B2 (en) | 2014-07-31 | 2016-08-09 | Google Technology Holdings LLC | Capturing images of active subjects according to activity profiles |
| US9654700B2 (en) | 2014-09-16 | 2017-05-16 | Google Technology Holdings LLC | Computational camera using fusion of image sensors |
| JP6452392B2 (ja) * | 2014-11-12 | 2019-01-16 | キヤノン株式会社 | 撮像装置およびその制御方法、プログラム、並びに記憶媒体 |
| KR102277178B1 (ko) * | 2015-03-09 | 2021-07-14 | 삼성전자 주식회사 | 카메라 모듈을 포함하는 전자 장치 및 전자 장치의 이미지 처리 방법 |
| KR102368625B1 (ko) * | 2015-07-23 | 2022-03-02 | 삼성전자주식회사 | 디지털 촬영 장치 및 그 방법 |
| WO2017095549A2 (en) | 2015-10-21 | 2017-06-08 | Massachusetts Institute Of Technology | Methods and apparatus for true high dynamic range (thdr) time-delay-and-integrate (tdi) imaging |
| KR102103252B1 (ko) | 2015-12-28 | 2020-04-22 | 후아웨이 테크놀러지 컴퍼니 리미티드 | 이미지 융합 방법 및 장치, 및 단말 디바이스 |
| CN106303269A (zh) * | 2015-12-28 | 2017-01-04 | 北京智谷睿拓技术服务有限公司 | 图像采集控制方法和装置、图像采集设备 |
| FR3050596B1 (fr) * | 2016-04-26 | 2018-04-20 | New Imaging Technologies | Systeme imageur a deux capteurs |
| CN109417592B (zh) | 2016-07-01 | 2020-12-29 | 麦克赛尔株式会社 | 拍摄装置、拍摄方法及拍摄程序 |
| WO2018088061A1 (ja) * | 2016-11-08 | 2018-05-17 | ソニー株式会社 | 画像転送装置、画像転送方法、プログラム、動画像生成システム |
| JP2018182554A (ja) * | 2017-04-14 | 2018-11-15 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置および固体撮像装置の制御方法、並びに電子機器 |
| JP6755405B2 (ja) * | 2017-08-18 | 2020-09-16 | 富士フイルム株式会社 | 撮像装置、撮像装置の制御方法、及び撮像装置の制御プログラム |
| FR3078808B1 (fr) * | 2018-03-08 | 2021-07-16 | Commissariat Energie Atomique | Procede de traitement d'image inter-trame et intra-trame |
| CN108419023B (zh) * | 2018-03-26 | 2020-09-08 | 华为技术有限公司 | 一种生成高动态范围图像的方法以及相关设备 |
| JP7129264B2 (ja) | 2018-08-03 | 2022-09-01 | キヤノン株式会社 | 撮像装置 |
| CN110213503A (zh) * | 2019-06-28 | 2019-09-06 | Oppo广东移动通信有限公司 | 图像处理方法、装置、存储介质及电子设备 |
| CN110278375B (zh) * | 2019-06-28 | 2021-06-15 | Oppo广东移动通信有限公司 | 图像处理方法、装置、存储介质及电子设备 |
| EP4102819A4 (en) * | 2020-02-05 | 2023-07-26 | Panasonic Intellectual Property Management Co., Ltd. | IMAGE DEVICE AND IMAGE PROCESSING METHOD |
| JP2022188690A (ja) | 2021-06-09 | 2022-12-21 | オリンパス株式会社 | 撮像装置、画像処理装置、画像処理方法、記憶媒体 |
| US11843868B2 (en) * | 2021-07-13 | 2023-12-12 | SK Hynix Inc. | Electronic apparatus based on multiple exposure image and operating method thereof |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3074967B2 (ja) | 1992-10-27 | 2000-08-07 | 松下電器産業株式会社 | 高ダイナミックレンジ撮像・合成方法及び高ダイナミックレンジ撮像装置 |
| CN100566381C (zh) * | 2006-01-23 | 2009-12-02 | 精工爱普生株式会社 | 摄像元件及其装置、摄像方法、摄像系统及图像处理装置 |
| JP4638361B2 (ja) * | 2006-02-16 | 2011-02-23 | パナソニック株式会社 | 撮像装置 |
| JP5100066B2 (ja) * | 2006-09-06 | 2012-12-19 | パナソニック株式会社 | 撮像装置および撮像方法 |
| JP4448888B2 (ja) * | 2008-04-01 | 2010-04-14 | 富士フイルム株式会社 | 撮像装置及び撮像装置の信号処理方法 |
| JP4661922B2 (ja) * | 2008-09-03 | 2011-03-30 | ソニー株式会社 | 画像処理装置、撮像装置、固体撮像素子、画像処理方法およびプログラム |
| JP5400406B2 (ja) * | 2009-02-06 | 2014-01-29 | キヤノン株式会社 | 撮像装置 |
| JP5319347B2 (ja) * | 2009-03-17 | 2013-10-16 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP5296193B2 (ja) * | 2009-04-08 | 2013-09-25 | パナソニック株式会社 | 撮像装置、再生装置、撮像方法及び再生方法 |
| JP5458865B2 (ja) * | 2009-09-18 | 2014-04-02 | ソニー株式会社 | 画像処理装置、撮像装置、および画像処理方法、並びにプログラム |
| JP2011244309A (ja) | 2010-05-20 | 2011-12-01 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| CN103053164B (zh) * | 2010-12-16 | 2015-06-17 | 松下电器产业株式会社 | 摄像装置及图像处理装置 |
| JP2012216957A (ja) * | 2011-03-31 | 2012-11-08 | Panasonic Corp | 撮像処理装置 |
| JP2012257193A (ja) * | 2011-05-13 | 2012-12-27 | Sony Corp | 画像処理装置、撮像装置、および画像処理方法、並びにプログラム |
| JP2013038504A (ja) * | 2011-08-04 | 2013-02-21 | Sony Corp | 撮像装置、および画像処理方法、並びにプログラム |
| JP5797072B2 (ja) * | 2011-09-22 | 2015-10-21 | キヤノン株式会社 | 撮像装置及びその制御方法、並びにプログラム |
| CN202713478U (zh) * | 2012-03-26 | 2013-01-30 | 徐辰 | 成像装置 |
-
2013
- 2013-02-20 JP JP2013031428A patent/JP6172967B2/ja not_active Expired - Fee Related
-
2014
- 2014-02-07 US US14/175,479 patent/US9160934B2/en not_active Expired - Fee Related
- 2014-02-20 CN CN201410058861.5A patent/CN104010128B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014160987A (ja) | 2014-09-04 |
| US20140232929A1 (en) | 2014-08-21 |
| US9160934B2 (en) | 2015-10-13 |
| CN104010128A (zh) | 2014-08-27 |
| CN104010128B (zh) | 2017-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6172967B2 (ja) | 撮像装置、及びその制御方法 | |
| JP6159105B2 (ja) | 撮像装置及びその制御方法 | |
| JP5889323B2 (ja) | 撮像装置及び撮像装置の制御方法 | |
| US9210333B2 (en) | Image capturing apparatus for generating composite image and control method thereof | |
| JP2014154982A (ja) | 撮像装置およびその制御方法 | |
| JP5889324B2 (ja) | 撮像装置及び撮像装置の制御方法 | |
| JP2010130570A (ja) | 撮像装置及び撮像方法 | |
| JP2017108309A (ja) | 撮像装置および撮像方法 | |
| US20130071036A1 (en) | Image processing device, image processing method, and imaging device | |
| JP5199736B2 (ja) | 画像撮像装置 | |
| JP2007214892A (ja) | 撮像装置 | |
| JP2008277896A (ja) | 撮像装置および撮像方法 | |
| JP3682482B2 (ja) | 撮像装置 | |
| JP6118118B2 (ja) | 撮像装置およびその制御方法 | |
| JP2016111568A (ja) | 像ぶれ補正制御装置、撮像装置およびそれらの制御方法、プログラム | |
| JP5947625B2 (ja) | 撮像装置、及びその制御方法 | |
| JP6108854B2 (ja) | 撮像装置及びその制御方法 | |
| JP2015056758A (ja) | 撮像装置、その制御方法、及び制御プログラム | |
| JP7234015B2 (ja) | 撮像装置およびその制御方法 | |
| JP6075829B2 (ja) | 撮像装置、カメラシステム、撮像装置の制御方法、プログラム、記憶媒体 | |
| JP6990988B2 (ja) | 撮像装置及び撮像素子の制御方法 | |
| JP2011182013A (ja) | 撮像装置及び画像生成プログラム | |
| JP5772064B2 (ja) | 撮像装置及び画像生成プログラム | |
| JP2011166515A (ja) | 撮像装置 | |
| JP2021027488A (ja) | 撮像素子及びその制御方法、撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160210 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170404 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170704 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6172967 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |