JP6165877B2 - 電力変換装置および永久磁石同期電動機の制御方法 - Google Patents
電力変換装置および永久磁石同期電動機の制御方法 Download PDFInfo
- Publication number
- JP6165877B2 JP6165877B2 JP2015548928A JP2015548928A JP6165877B2 JP 6165877 B2 JP6165877 B2 JP 6165877B2 JP 2015548928 A JP2015548928 A JP 2015548928A JP 2015548928 A JP2015548928 A JP 2015548928A JP 6165877 B2 JP6165877 B2 JP 6165877B2
- Authority
- JP
- Japan
- Prior art keywords
- synchronous motor
- magnetic pole
- pole position
- permanent magnet
- power conversion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001360 synchronised effect Effects 0.000 title claims description 138
- 238000000034 method Methods 0.000 title claims description 15
- 238000006243 chemical reaction Methods 0.000 claims description 39
- 230000006870 function Effects 0.000 claims description 26
- 238000001514 detection method Methods 0.000 claims description 18
- 230000002159 abnormal effect Effects 0.000 claims description 17
- 230000005856 abnormality Effects 0.000 claims description 6
- 230000004907 flux Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 11
- 239000003990 capacitor Substances 0.000 description 4
- 238000009499 grossing Methods 0.000 description 4
- 238000001816 cooling Methods 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 229910002601 GaN Inorganic materials 0.000 description 2
- JMASRVWKEDWRBT-UHFFFAOYSA-N Gallium nitride Chemical compound [Ga]#N JMASRVWKEDWRBT-UHFFFAOYSA-N 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000013500 data storage Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- HBMJWWWQQXIZIP-UHFFFAOYSA-N silicon carbide Chemical compound [Si+]#[C-] HBMJWWWQQXIZIP-UHFFFAOYSA-N 0.000 description 2
- 229910010271 silicon carbide Inorganic materials 0.000 description 2
- 230000003313 weakening effect Effects 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/029—Restarting, e.g. after power failure
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2203/00—Indexing scheme relating to controlling arrangements characterised by the means for detecting the position of the rotor
- H02P2203/03—Determination of the rotor position, e.g. initial rotor position, during standstill or low speed operation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
Description
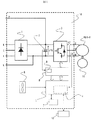
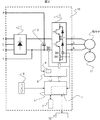
内部構成は省略するが、各種の制御データが格納された記憶部の記憶データからの情報に基づいて制御演算装置4(例えば、マイコンなど)が演算を行う。
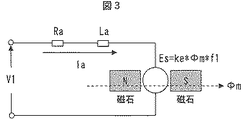
弱め界磁制御などを行わない場合、磁束Φmの方向に流れるd軸電流指令Id*=0に設定し、検出した励磁電流成分Idが常に0となるようにd軸電流制御の回路が動作する。このように制御すれば、永久磁石同期電動機に流れる電気子電流Iaは、トルク電流成分Iqとしてq軸電流制御系が動作し制御される。すなわち、永久磁石同期電動機に流れる電気子電流Iaを、モータの発生トルクに比例するトルク電流成分として動作させることができる。
Claims (15)
- 直流を交流に変換する電力変換部を備え、永久磁石を使用した同期電動機を可変速制御する電力変換装置において、
前記同期電動機に流れる電流を検出する電流検出回路と、
前記同期電動機の始動時に前記同期電動機の磁極位置を推定する推定手段と、
前記同期電動機の停止時における磁極位置を示す磁極位置推定データを格納するメモリと、を備え、
前記メモリに格納された磁極位置推定データか、前記推定手段により得られる磁極位置推定データかを選択する選択手段と、前記選択手段において選択された磁極位置推定データを用いて、前記同期電動機を駆動する制御部と、を備える電力変換装置。 - 請求項1に記載の電力変換装置において、
前記メモリは、不揮発性メモリであって、
前記電力変換装置への電源が遮断された場合に、前記同期電動機の停止時における磁極位置推定データを前記不揮発性メモリに格納することを特徴とする電力変換装置。 - 請求項1又は2に記載の電力変換装置において、
前記同期電動機の始動時に異常が発生した場合に、前記制御部は、前記推定手段により前記同期電動機の磁極位置を再推定する異常トリップ自動解除を行うか、あるいは異常トリップ表示を行い、前記電力変換装置を遮断状態とするか、のいずれかを実行することを特徴とする電力変換装置。 - 請求項1に記載の電力変換装置において、
前記電力変換装置の運転条件を設定する操作パネルを備え、
前記メモリに格納された磁極位置推定データを用いて前記同期電動機を駆動するか、前記同期電動機の始動時に前記磁極位置を推定する推定手段により前記同期電動機の磁極位置を推定することにより前記同期電動機を駆動するかを前記操作パネルで選択できることを特徴とする電力変換装置。 - 請求項1に記載の電力変換装置において、
前記電力変換装置の運転条件を設定する上位装置を備え、
前記メモリに格納された磁極位置推定データを用いて前記同期電動機を駆動するか、前記同期電動機の始動時に前記磁極位置を推定する推定手段により前記同期電動機の磁極位置を推定することにより前記同期電動機を駆動するかを前記上位装置で選択できることを特徴とする電力変換装置。 - 請求項1に記載の電力変換装置において、
前記メモリに格納された磁極位置推定データを用いて前記同期電動機を駆動するか、前記同期電動機の始動時に前記磁極位置を推定する推定手段により前記同期電動機の磁極位置を推定することにより前記同期電動機を駆動するかを選択するハードスイッチを備えたことを特徴とする電力変換装置。 - 請求項3に記載の電力変換装置において、
前記電力変換装置の運転条件を設定する操作パネルを備え、
前記同期電動機の始動時に異常が発生した場合に、前記推定手段により前記同期電動機の磁極位置を再推定する異常トリップ自動解除を行うか、あるいは異常トリップ表示を行い、前記電力変換装置を遮断状態とするか、を前記操作パネルで選択できることを特徴とする電力変換装置。 - 請求項3に記載の電力変換装置において、
前記電力変換装置の運転条件を設定する上位装置を備え、
前記同期電動機の始動時に異常が発生した場合に、前記推定手段により前記同期電動機の磁極位置を再推定する異常トリップ自動解除を行うか、あるいは異常トリップ表示を行い、前記電力変換装置を遮断状態とするか、を前記上位装置で選択できることを特徴とする電力変換装置。 - 請求項1に記載の電力変換装置において、
前記メモリから読み出した磁極位置推定データを表示する表示部を備えたことを特徴とする電力変換装置 - 請求項9に記載の電力変換装置において、
前記電力変換装置の運転条件を設定する操作パネルあるいは上位装置を備え、
前記表示部は前記操作パネルあるいは前記上位装置に設けられていることを特徴とする電力変換装置。 - 永久磁石を使用した同期電動機を可変速制御する制御方法であって、
直流を交流に変換する工程と、
前記同期電動機に流れる電流を検出する電流検出工程と、
前記同期電動機の始動時に前記同期電動機の磁極位置を推定する推定工程と、
前記同期電動機の停止時における磁極位置推定データをメモリに格納する工程と、
前記メモリに格納された磁極位置推定データを用いて前記同期電動機を駆動するか、前記推定工程により推定された前記同期電動機の磁極位置を用いて前記同期電動機を駆動するかの選択に応じて、前記同期電動機を駆動する制御工程と、を備えることを特徴とする永久磁石同期電動機の制御方法。 - 請求項11に記載の永久磁石同期電動機の制御方法において、
前記同期電動機を可変速制御する装置の電源が遮断される場合に、前記同期電動機の停止時における磁極位置推定データを不揮発性メモリに格納することを特徴とする永久磁石同期電動機の制御方法。 - 請求項11又は12に記載の永久磁石同期電動機の制御方法において、
前記永久磁石同期電動機の始動時に異常が発生した場合に、異常トリップ自動解除機能を動作させ、前記推定手段により前記同期電動機の磁極位置を再推定するか、あるいは異常トリップ自動解除機能を不動作にして、異常トリップ表示させるか、を選択して制御することを特徴とする永久磁石同期電動機の制御方法。 - 請求項11に記載の永久磁石同期電動機の制御方法において、
前記同期電動機にメカブレーキが設けられている場合は、前記メモリに格納された磁極位置推定データを用いて前記同期電動機を駆動するように制御することを特徴とする永久磁石同期電動機の制御方法。 - 請求項11に記載の永久磁石同期電動機の制御方法において、
前記同期電動機が停止後も、惰性回転または負荷により回転する場合は、前記推定工程により推定された前記同期電動機の磁極位置を用いて前記同期電動機を駆動するように制御することを特徴とする永久磁石同期電動機の制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/081463 WO2015075806A1 (ja) | 2013-11-22 | 2013-11-22 | 電力変換装置および永久磁石同期電動機の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015075806A1 JPWO2015075806A1 (ja) | 2017-03-16 |
| JP6165877B2 true JP6165877B2 (ja) | 2017-07-19 |
Family
ID=53179112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015548928A Active JP6165877B2 (ja) | 2013-11-22 | 2013-11-22 | 電力変換装置および永久磁石同期電動機の制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3073629B1 (ja) |
| JP (1) | JP6165877B2 (ja) |
| CN (1) | CN105518988B (ja) |
| WO (1) | WO2015075806A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108604854B (zh) * | 2016-06-22 | 2020-07-24 | 株式会社日立产机系统 | 电力转换装置 |
| KR101852754B1 (ko) * | 2016-10-27 | 2018-04-27 | 엘에스산전 주식회사 | 영구자석 동기전동기의 센서리스 제어 시스템 |
| US11114958B2 (en) * | 2017-09-25 | 2021-09-07 | Siemens Aktiengesellschaft | Braking method for an electric motor |
| CN109450297B (zh) * | 2018-12-19 | 2020-07-03 | 四川虹美智能科技有限公司 | 一种控制电机的方法及装置 |
| JP7169218B2 (ja) * | 2019-02-12 | 2022-11-10 | 日立Astemo株式会社 | アクチュエータ制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0787784A (ja) * | 1993-06-29 | 1995-03-31 | Fujitsu General Ltd | ブラシレスモータの制御方法およびその装置 |
| JP4111599B2 (ja) * | 1998-08-28 | 2008-07-02 | 株式会社日立製作所 | 永久磁石式同期モータの制御装置 |
| JP2002281795A (ja) * | 2001-03-23 | 2002-09-27 | Sumitomo Heavy Ind Ltd | 同期モータの再給電制御方法及び同期モータの制御装置 |
| US7602128B2 (en) * | 2003-03-03 | 2009-10-13 | Abb Ab | Device and method to configure same |
| KR100657489B1 (ko) * | 2005-03-08 | 2006-12-19 | 엘지전자 주식회사 | 센서가 부착되지 않은 모터의 기동 판정 방법 및 장치 |
| JP4876525B2 (ja) | 2005-10-18 | 2012-02-15 | パナソニック株式会社 | 同期電動機の磁極検出方法 |
| JP2007174721A (ja) * | 2005-12-19 | 2007-07-05 | Mitsubishi Heavy Ind Ltd | ブラシレスdcモータの初期回転位置検出装置及び初期回転位置検出方法 |
| JP2013021843A (ja) * | 2011-07-13 | 2013-01-31 | Fuji Electric Co Ltd | 永久磁石同期電動機の初期磁極位置調整装置 |
-
2013
- 2013-11-22 CN CN201380079224.XA patent/CN105518988B/zh active Active
- 2013-11-22 JP JP2015548928A patent/JP6165877B2/ja active Active
- 2013-11-22 EP EP13897884.6A patent/EP3073629B1/en active Active
- 2013-11-22 WO PCT/JP2013/081463 patent/WO2015075806A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP3073629A4 (en) | 2017-08-16 |
| JPWO2015075806A1 (ja) | 2017-03-16 |
| WO2015075806A1 (ja) | 2015-05-28 |
| CN105518988A (zh) | 2016-04-20 |
| EP3073629A1 (en) | 2016-09-28 |
| CN105518988B (zh) | 2018-09-11 |
| EP3073629B1 (en) | 2023-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8174219B2 (en) | Motor control unit and air conditioner having the same | |
| JP4722069B2 (ja) | 電動機駆動装置および電動機駆動方法並びに冷凍空調装置 | |
| JP4085112B2 (ja) | モータ制御方法およびモータ制御装置 | |
| JP6165877B2 (ja) | 電力変換装置および永久磁石同期電動機の制御方法 | |
| US20130257326A1 (en) | Method for operating a brushless electric motor | |
| JP5314103B2 (ja) | 永久磁石同期電動機駆動装置 | |
| CN104218852B (zh) | 马达控制装置以及具备该马达控制装置的建筑机械 | |
| US8269442B2 (en) | Method and apparatus for driving a brushless D.C. motor | |
| JP2013078200A (ja) | 同期電動機の制御装置及び制御方法 | |
| JP6463966B2 (ja) | モータ駆動装置およびモータ駆動用モジュール並びに冷凍機器 | |
| JP2005094853A (ja) | モータ制御装置 | |
| JP2010041868A (ja) | 同期電動機のロータ回転監視装置および制御システム | |
| US8729840B2 (en) | Sensorless control unit for brushless DC motor | |
| JP2006223037A (ja) | モータ制御装置とその制御方法 | |
| JP4877607B2 (ja) | インバータ装置 | |
| JP4539237B2 (ja) | インバータ装置 | |
| JP6307223B2 (ja) | 三相同期電動機の制御装置及びそれを用いた三相同期電機駆動システム、一体型電動機システム、ポンプシステム、及び圧縮機システム、並びに三相同期電動機の制御方法 | |
| JP2013123288A (ja) | 電動機の制御装置 | |
| JP2013121280A (ja) | モータ制御装置 | |
| KR102564593B1 (ko) | 모터 구동 장치 및 공기 조화기 | |
| JP2019068515A (ja) | モータ制御装置 | |
| JP2013172634A (ja) | モータ駆動装置 | |
| WO2015098154A1 (ja) | 電力変換装置および電力変換装置の制御方法 | |
| JP2008125205A (ja) | 電動機駆動装置及びそれを用いた空気調和機 | |
| CN107482965B (zh) | 同步电动机的控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161207 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170119 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170523 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170621 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6165877 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |