JP6100552B2 - 位置検出装置 - Google Patents
位置検出装置 Download PDFInfo
- Publication number
- JP6100552B2 JP6100552B2 JP2013027663A JP2013027663A JP6100552B2 JP 6100552 B2 JP6100552 B2 JP 6100552B2 JP 2013027663 A JP2013027663 A JP 2013027663A JP 2013027663 A JP2013027663 A JP 2013027663A JP 6100552 B2 JP6100552 B2 JP 6100552B2
- Authority
- JP
- Japan
- Prior art keywords
- harmonic
- signal
- phase
- amplitude
- position detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 40
- 238000000605 extraction Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images





Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
α =a1・cosθ+a3・cos3θ
β =b1・sinθ−b3・sin3θ
a1・cos(θ(n))+a3・cos(3・θ(n) )= α(n)
b1・sin(θ(n)) −b3・sin(3・θ(n))= β(n)
a3= (α1・cos(θ2)− α2・cos(θ1))/(cos(3・θ1)・cos(θ2)− cos(3・θ2)・cos(θ1))
b3= (β1・sin(θ2)− β2・sin(θ1))/(sin(3・θ2)・sin(θ1)− sin(3・θ1)・sin(θ2))
α’(n) = α(n)−a3・cos(3・θ’)
β’(n) = β(n)+b3・sin(3・θ’)
ただし、α(n),β(n)は補正前のセンサー信号Sa,Sbのデジタル信号、θ’は、位置データ算出部3によって算出される位置データθの前回値である。このように本実施例ではセンサー信号に重畳した3次高調波歪を検出し、これらの歪を除去することができるため高精度な位置データの算出が可能となる。
A(n)=α(n)3/0.75
B(n)=β(n)3/0.75
α(n)3=(cos(θ(n))+a2・cos(2・θ(n)))3
=cos(θ(n))3
+3・a2・cos(θ(n))2・cos(2・θ(n))
+3・a22・cos(θ(n))・cos(2・θ(n))2
+a23・cos(2・θ(n))3
となる。
A(n)=α(n)・COS(2・θ’)・2
B(n)=β(n)・COS(2・θ’+π)・2
A1(n)=A1(n−1)+(A(n)−A1(n−1))/k
B1(n)=B1(n−1)+(B(n)−B1(n−1))/k
A2(n)=A2(n−1)+(A1(n)−A2(n−1))/k
B2(n)=B2(n−1)+(B1(n)−B2(n−1))/k
α’(n)=α(n)−a2・cos(2・θ)
=α(n)−a2・(cosθ2・2−1)
ここで、α(n)=cosθ+a2・cos(2・θ)なので、cosθ=α(n)−a2・cos(2・θ)となり、α(n)に比べ[a2・cos(2・θ)]が十分小さいので、cosθ≒α(n)となり、これを代入すると
α’(n)=α(n)−a2・(α(n)2・2−1)
となる。同様にして、
β’(n)=β(n)−b2・(β(n)2・2−1)
となる。
α’(n)=α(n)−a2・COS(2・θ’)
β’(n)=β(n)−b2・COS(2・θ’+π)
ただし、α(n),β(n)は低減前のセンサー信号Sa,Sbのデジタル信号、θ’は、位置データ算出部3によって算出される位置データθの前回値である。
Claims (2)
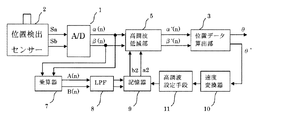
- 相対変位する2つの物体の位置に応じてセンサー信号検出部から得られる周期的なA相およびB相の2相の正弦波状のアナログ信号をそれぞれデジタル信号に変換し、前記デジタル信号から位置データを算出し、前記位置データから前記物体の位置を得る位置検出装置において、
前記デジタル信号を入力し2次高調波を抽出するための演算を行う乗算器と、
前記乗算器の出力を入力し2次のローパスフィルタ処理を行うことで前記デジタル信号の2次高調波の振幅を算出するローパスフィルタと、
前記位置データから速度算出する速度変換器と、
前記速度変換器で算出された速度が一定になった後、前記ローパスフィルタの時定数に比例した時間待ってから、記憶有効信号をONにし、前記速度変換器で算出された速度が変化した時は、記憶有効信号をOFFにする高調波設定手段と、
前記記憶有効信号がONの時のみに、ローパスフィルタの出力である2次高調波の振幅を記憶する記憶器と、
前記記憶器が記憶している2次高調波の振幅に従って前記デジタル信号の2次高調波成分を低減する高調波低減部と、
前記2次高調波成分を低減した前記デジタル信号から位置データを算出することを特徴とした高調波を低減する位置検出装置。 - 前記センサー信号検出の順番をn、前記デジタル信号をα(n),β(n)とした場合、
前記乗算器は、
A(n)=α(n)3/0.75
B(n)=β(n)3/0.75
を算出し、2次高調波の抽出値A(n)、B(n)を出力する、
ことを特徴とする請求項1に記載の2次高調波成分を低減する位置検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013027663A JP6100552B2 (ja) | 2013-02-15 | 2013-02-15 | 位置検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013027663A JP6100552B2 (ja) | 2013-02-15 | 2013-02-15 | 位置検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014157069A JP2014157069A (ja) | 2014-08-28 |
| JP6100552B2 true JP6100552B2 (ja) | 2017-03-22 |
Family
ID=51578020
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013027663A Active JP6100552B2 (ja) | 2013-02-15 | 2013-02-15 | 位置検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6100552B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016118439A (ja) * | 2014-12-19 | 2016-06-30 | オークマ株式会社 | 位置検出装置 |
| WO2016194711A1 (ja) | 2015-05-29 | 2016-12-08 | 旭化成株式会社 | 気体分離膜 |
| WO2017068684A1 (ja) * | 2015-10-22 | 2017-04-27 | 三菱電機株式会社 | 角度検出装置 |
| DE112017001147B4 (de) | 2016-03-04 | 2022-11-24 | Asahi Kasei Kabushiki Kaisha | Modul für Gastrennung, Gastrennungsverfahren und Verwendung des Gastrennungsverfahrens zur Herstellung eines Olefingases |
| CN109475823B (zh) | 2016-08-31 | 2021-06-29 | 旭化成株式会社 | 气体分离膜 |
| JP6875945B2 (ja) * | 2017-06-30 | 2021-05-26 | オークマ株式会社 | 位置データ用フィルタ |
| US11353345B2 (en) | 2019-07-22 | 2022-06-07 | Boston Dynamics, Inc. | Magnetic encoder calibration |
| CN119995623B (zh) * | 2025-01-23 | 2025-10-21 | 中国电子科技集团公司第二十九研究所 | 自适应扩展adc无杂散动态范围的方法、装置、介质及系统 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010156554A (ja) * | 2008-12-26 | 2010-07-15 | Okuma Corp | 位置検出装置 |
-
2013
- 2013-02-15 JP JP2013027663A patent/JP6100552B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014157069A (ja) | 2014-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6100552B2 (ja) | 位置検出装置 | |
| JP5041419B2 (ja) | レゾルバ装置およびレゾルバの角度検出装置とその方法 | |
| EP3401644B1 (en) | Encoder output signal correction apparatus and method | |
| JP5281102B2 (ja) | レゾルバ装置、レゾルバの角度検出装置およびその方法 | |
| JP6005781B2 (ja) | レゾルバ装置 | |
| JP5178374B2 (ja) | 検出装置 | |
| JP5173962B2 (ja) | レゾルバ/デジタル変換装置およびレゾルバ/デジタル変換方法 | |
| WO2019105133A1 (zh) | 相位偏差的补偿方法和装置 | |
| JP2014025871A (ja) | エンコーダ出力信号補正装置 | |
| US9140581B2 (en) | Position detector | |
| CN108375391A (zh) | 正余弦信号处理方法及系统 | |
| JP2009025068A (ja) | レゾルバ/デジタル変換方法およびレゾルバ/デジタル変換回路 | |
| JP2020012634A (ja) | ロータリーエンコーダ信号処理装置及びその信号処理方法 | |
| US10312837B2 (en) | Information processing apparatus, and recording medium storing computer program | |
| KR100897476B1 (ko) | 마그네틱 엔코더의 출력신호 보상장치 및 보상방법 | |
| KR102051820B1 (ko) | 비동기 리졸버 회전각 검출기 및 이의 방법 | |
| CN102809688A (zh) | 一种基于迭代傅里叶变换计算三相电压实时相位的方法 | |
| JP6688166B2 (ja) | 位置検出装置 | |
| JP2008185486A (ja) | 振幅検出装置 | |
| CN111207723B (zh) | 一种差分式圆感应同步器的解调方法 | |
| JP2016118439A (ja) | 位置検出装置 | |
| JP2019020294A (ja) | 回転角センサ−デジタルコンバータおよび回転角センサ−デジタル変換方法 | |
| JP3914818B2 (ja) | 回転角度検出装置 | |
| JP7190454B2 (ja) | 移動体の運動による位置変化量を検出する方法及び装置 | |
| CN116614045A (zh) | 永磁同步电机转子位置传感器故障补偿方法及控制系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151008 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160804 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160816 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170223 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6100552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |