JP5281102B2 - レゾルバ装置、レゾルバの角度検出装置およびその方法 - Google Patents
レゾルバ装置、レゾルバの角度検出装置およびその方法 Download PDFInfo
- Publication number
- JP5281102B2 JP5281102B2 JP2011002213A JP2011002213A JP5281102B2 JP 5281102 B2 JP5281102 B2 JP 5281102B2 JP 2011002213 A JP2011002213 A JP 2011002213A JP 2011002213 A JP2011002213 A JP 2011002213A JP 5281102 B2 JP5281102 B2 JP 5281102B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- signal
- error
- resolver
- fourier transform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
より特定的には、本発明は検出精度を高めたレゾルバの角度検出装置その方法と、および、当該角度検出装置とレゾルバとを有するレゾルバ装置に関する。
1点鎖線で包囲したレゾルバ本体7は、SIN巻線4と、このSIN巻線4と機械的に90度ずれて配設されたCOS巻線5と、ロータ巻線6とを備えている。ロータ巻線6に回転角度(または回転位置)を検出する対象、たとえば、モータの軸(図示せず)が接続される。
レゾルバは、2相励磁1出力方式と、1相励磁2出力方式とが知られている。以下、2相励磁1出力方式を例示する。
SIN巻線4とCOS巻線5にそれぞれSIN巻線電圧V1およびCOS巻線電圧V2が印加され、ロータ巻線6から回転角度検出対象の回転角度に相当する信号が検出される。すなわち、回転角度検出対象が回転するとロータ巻線6が回転し、SIN巻線4およびCOS巻線5との磁束の鎖交状態が変化する。その状態をロータ巻線6からロータ巻線電圧V3として取り出して演算処理することにより、回転角度検出対象の回転角度または位置を検出することができる。
しかしながら、レゾルバは、サーボモータなどの回転角度の検出に使用されているエンコーダと比較すると、検出誤差が大きく検出精度が低いという欠点を有する。そのため、検出誤差を補正することが行われている。
直線CV1が誤差がない実際の正確な角度を示し、直線CV1の上下に変動している曲線CV2が検出誤差を含む実際の検出角度を示す。
レゾルバの検出誤差は、図2に例示したように、個々のレゾルバについて、角度に対してその誤差の大きさと方向とが決まっている。したがって、各レゾルバについて再現性はあるものの、検出誤差に関してレゾルバの固体差が大きく、図2の曲線CV2に例示した検出誤差の波形も各レゾルバごとに異なる。したがって、検出精度を高めるため検出誤差を補正する処理もレゾルバ個々に行っていた。
図3はそのような推定角度生成回路の回路構成を示す図である。
推定角度生成回路14Aは、テーブル番号取得部35と、誤差角度データ参照部38と、減算部37とを有する。誤差角度データ参照部38はROM38aを有する。
事前に、各レゾルバについて、図2に例示したように、実際の角度と検出角度とを求めて検出誤差を検出し(算出し)、検出した誤差の波形信号をROM38aにテーブルとして格納しておく。実際に検出誤差を補正して角度を算出するとき、レゾルバのロータ巻線6から検出した角度検出信号S11(V3)からテーブル番号取得部35においてROM38aに格納された誤差の波形信号を読み出すためのアドレス信号S35を生成し、誤差角度データ参照部38がアドレス信号S35に基づいてROM38aから対応する誤差角度データS36を読みだす。さらに、減算部37において、角度検出信号S11から誤差角度データS36を減じて角度検出信号S11の補正を行う。
このように補正した角度を、たとえば、位置フィードバック制御系または速度フィードバック系の角度検出信号として利用する。
特に、実際の使用においては、レゾルバと角度検出装置とが1対1に対応していなければならないという制限があり、そのような角度検出装置を用いてレゾルバ個々にそのような作業を行う必要があり、このような手法は汎用のサーボモータ、サーボアンプへの適用には向いていないという不具合がある。
1相励磁2出力方式のレゾルバの(S−sin)信号と、(S−cos)信号と、励磁信号(sinωt)とを入力してA/D変換し、A/D変換した(S−sin)信号と(S−cos)信号とをデジタル的に乗算して乗算結果SA1と、A/D変換した励磁信号(sinωt)にcosωtを乗じて乗算結果SB1を求める処理を、サンプリング数n回だけ反復する。同様に、cos信号にsinωtを乗じて乗算結果CA2、CB2を求める。SA1とSB1との絶対値からsinθの絶対値を求め、CA2とCB2との絶対値からcosθの絶対値を求め、sinθとcosθとのtan−θを求めてtan− テーブルから、デジタル角度θを求める。
イナーシャを用いて回転の変動のない状態で実角度と検出角度から検出誤差を測定することは補正の精度を高める上で利点がある。しかしながら、回転位置の測定の対象となるモータは、たとえば、ロボットや搬送機に取り付けられた状態で電源が投入されて回転する場合が多く、現実には、そのようなイナーシャをモータなどに取り付けることは困難な場合が多い。
本発明は、個々のレゾルバの検出誤差を正確に補正可能な方法と装置、および、レゾルバ装置を提供する。
本発明のレゾルバの角度検出装置における検出誤差の補正方法の基本的な技術思想について述べる。
図4は図2に図解した誤差成分のみを取り出したグラフである。横軸は実角度を示し、縦軸は検出誤差を含む検出角度を示す。
レゾルバにおける検出誤差の要因は、レゾルバ内の巻線のアンバランスや巻線の相互干渉によって発生したものであるから、その成分は再現性があり、個々のレゾルバについて限られた成分に集中する。そのような成分を抽出する方法として、検出角度信号について周波数分析を行う。たとえば、周波数分析として、フーリエ変換を行う。
レゾルバ固有の検出誤差成分は限られた成分に集中するから、主要次数成分で複製(復元)した信号波形は殆ど、そのレゾルバの誤差の実際の波形と一致する。
このことから、本願発明者は、たとえば、誤差の波形信号を図3を参照して例示したROM38aなどのテーブルとして持つのではなく、回転角度検出対象の1回転の基本波に対する高調波成分の係数として持つことが可能であることを見いだした。
本発明のレゾルバの角度検出装置およびその方法はかかる知見に基づく。
a.誤差を含む角度検出信号から生成した誤差成分を含む速度信号を、好ましくは、速度信号の高周波成分を周波数変換、たとえば、フーリエ変換して複数に分割した各成分ごとの検出誤差の大きさを算出する。
b.算出した検出誤差を合成して、検出した角度信号に含まれる検出誤差を復元した誤差波形信号を生成する。
c.この誤差波形信号を用いて検出誤差を含む角度検出信号を補正する。
e.収束した各次成分の正弦波および各次成分の余弦波信号を加算して、誤差角度データを算出して推定角度誤差信号とする。
レゾルバとその角度検出装置
図6は本発明の実施の形態としてのレゾルバとその角度検出装置の構成図である。
図6において、レゾルバ本体7は、図1を参照して述べたものと同様、固定子側に機械的に90度ずれて配設されたSIN巻線4およびCOS巻線5と、回転部に配設されたロータ巻線6を有する。
2相励磁1相出力方式のレゾルバにおいては、SIN巻線4とCOS巻線5にそれぞれSIN巻線電圧S8およびCOS巻線電圧S9が印加され、ロータ巻線6から回転角度(または回転位置)検出対象(図示せず)の回転角度(または回転位置)に相当する信号S6が検出される。
他方、1相励磁2相出力方式のレゾルバにおいては、正弦波電圧がロータ巻線6に印加され、ロータ巻線6と固定子の角度θによって正弦波励磁電圧が振幅変調された電圧がSIN巻線4とCOS巻線5とに出力される。
なお、1相励磁2相出力方式のレゾルバは、角度検出器11からの角度検出信号S11の出力方法が異なる他は、下記に述べる内容と同じである。
以下、ロータ巻線6に接続される角度検出対象を、たとえば、ロボットのアームなどを駆動するモータの軸を例示して述べる。
また以下の記述においては、説明を簡単にするため、モータが1方向にのみ回転する場合を例示する。
レゾルバの角度検出装置100はまた、角度検出器11と、速度検出器12と、誤差推定器13と、推定角度生成回路14とを有する。
他方、本願明細書において、レゾルバの角度検出装置は、図6に図解したレゾルバ本体7を除く部分、すなわち、励磁カウンタ16と、第1励磁電圧発生器8と、第2励磁電圧発生器9と、受信フィルタ回路10と、角度検出器11と、速度検出器12と、誤差推定器13と、推定角度生成回路14とを含んだものを言う。
ただし、後述した記載から明らかなように、機能的には、レゾルバ本体7を駆動する、励磁カウンタ16、第1励磁電圧発生器8および第2励磁電圧発生器9をレゾルバ本体7とともに、「レゾルバ」として総称し、レゾルバの角度検出装置からは除くことができる。
励磁カウンタ16は、第1励磁電圧発生器8および第2励磁電圧発生器9においてSIN巻線電圧S8およびCOS巻線電圧S9を発生させるためのカウンタ出力パルス信号S16を生成する。
励磁カウンタ16は、レゾルバの角度検出精度(分解能)を規定する所定周波数のクロックパルスを発振するクロックパルス発振器と、そのクロックパルスを計数するカウンタを有しており、当該カウンタで計数したクロックパルスをカウンタ出力パルス信号S16として、第1励磁電圧発生器8、第2励磁電圧発生器9および角度検出器11に出力する。
第1励磁電圧発生器8および第2励磁電圧発生器9はそれぞれ、カウンタ出力パルス信号S16に基づいて、図7に例示したように、SIN巻線4およびCOS巻線5を励磁するSIN巻線電圧S8およびCOS巻線電圧S9を発生して、SIN巻線4およびCOS巻線5にそれぞれ印加する。
図7は、SIN巻線電圧S8およびCOS巻線電圧S9を図解したグラフである。
また、図7に例示した正弦波に代えて、PWM(パルス幅変調)波形とすることもできる。
たとえば、カウンタ出力パルス信号S16が印加される度に、ROMを有する第1励磁電圧発生器8はカウンタ出力パルス信号S16をsinαの角度αに相当するアドレス信号としてROMに入力し、図7に図解した波形のSIN巻線電圧S8を生成する。
同様に、カウンタ出力パルス信号S16が印加される度に、ROMを有する第2励磁電圧発生器9はカウンタ出力パルス信号S16をcosαの角度αに相当するアドレス信号としてROMに入力し、図7に図解した波形のCOS巻線電圧S9を生成する。
さらに、sinαとcosαとが位相90度ずれてはいるが、波形は同じであることを利用して、すなわち、角度を調整することにより、第1励磁電圧発生器8と第2励磁電圧発生器9とを共用することもできる。その結果、第1励磁電圧発生器8および第2励磁電圧発生器9の回路構成は一層簡単になる。
受信フィルタ回路10は、ロータ巻線6で検出したロータ巻線電圧S6に含まれる所定成分の信号、特に、励磁周波数付近の周波数成分を通過させるアナログのフィルタ回路、たとえば、アナログのローパスフィルタまたはアナログのバンドパスフィルタである。
レゾルバ本体7は雑音を含む環境に設置されたり、ロータ巻線電圧S6の伝送経路に雑音成分が存在し、受信フィルタ回路10に至るまでにロータ巻線電圧S6に雑音が重畳されている場合があるから、受信フィルタ回路10においてそのような雑音成分を除去して、励磁周波数付近の、後述する信号処理に有効な成分を抽出することが望ましい。
このように、受信フィルタ回路10は、レゾルバの角度検出装置100の構成に必須の要素ではないが、現実には上記目的を達成するため、設けることが望ましい。
角度検出器11は、受信フィルタ回路10で雑音を除去した回転角度検出対象の回転位置または角度を示すロータ巻線検出信号S10をもとに、励磁カウンタ16からのカウンタ出力パルス信号S16を用いてロータの角度(または回転位置)を検出する。
この詳細は図8を参照して後述する。
速度検出器12は、角度検出器11で検出した角度検出信号S11からロータ巻線6に接続されているモータの回転速度を検出する。
速度検出器12の詳細は図10を参照して後述する。
角度誤差推定器13は、速度検出器12で検出した回転速度信号S12と、角度検出器11で検出した角度検出信号S11とを用いてロータ巻線6で検出した検出誤差を含むロータの検出角度の内の検出誤差を推定して推定角度誤差信号S13を出力する。
角度誤差推定器13の詳細は図11を参照して後述する。
推定角度生成回路14は、角度誤差推定器13において推定した推定角度誤差信号S13を用いて角度検出器11において検出した角度検出信号S11を補正して推定角度検出信号S14を生成する。この推定角度検出信号S14は検出誤差が補正された正確な角度を示す。
推定角度生成回路14の詳細は、図15を参照して述べる。
推定角度検出信号S14が、制御対象かつ回転角度検出対象である、たとえば、ロボットのアームを駆動するモータの制御装置に、角度検出信号として出力される。
図8は角度検出器11の回路構成図である。
角度検出器11は、基準波形生成回路17と、ロータ巻線検出信号S10が入力されるコンパレータ回路18と、位相差カウント(計数)回路19と、カウンタクロック発生器20とを有し、位相差カウント回路19から角度検出信号S11を出力する。
図9は基準波形生成回路17の出力信号S17とコンパレータ回路18の出力信号とを示すグラフである。
たとえば、位相差カウント回路19は、基準波形信号S17からの立ち上がり時点からクロック信号S20を計数し、比較結果パルス信号S18の立ち上がり時点でクロック信号S20の計数を停止する。位相差カウント回路19におけるこの計数値が位相差αを示し、この位相差αが回転角度検出対象の検出すべき回転角度に相当しており、ロータ巻線6の固定子との角度θに相当する。
図10は速度検出器12の回路構成である。
速度検出器12は、1サンプリングディレイ回路23と、減算回路24とで構成されている。
速度は、位置または角度を微分する、または、位置または角度を差分することにより求めることができる。速度検出器12はこの方法により位置または角度を微分して速度を検出する。
1サンプリングディレイ回路23は角度検出信号S11を1サンプリング時間遅延する。減算回路24は、今回の角度検出信号S11と1サンプリングディレイ回路23を経由した1サンプリング遅延された前回の角度検出信号S11との差分を算出する。この差分演算により、角度検出信号S11の速度に相当する信号、すなわち、速度検出信号S12が得られる。
1サンプリングディレイ回路23における、角度検出信号S11を1サンプリング時間遅延することは、実際は、たとえば、前回の角度検出信号S11を保存しておき、今回の演算にその保存結果を利用することを意味しており、1サンプリングディレイ回路23はメモリあるいはレジスタなどで構成される。
図11は角度誤差推定器13の回路構成図である。
角度誤差推定器13は、上述した検出誤差の補正方法についての基本思想に従って、すなわち、レゾルバの角度検出誤差波形がレゾルバ固有の決められたn次成分から構成されていることを利用して、検出された誤差を含む角度信号から生成した検出誤差を含む速度信号を周波数分析、たとえば、フーリエ変換処理して複数に分割した各成分ごとの検出誤差の大きさを算出し、算出した検出誤差を合成してロータ巻線電圧S6に含まれる検出誤差を復元して、誤差波形信号を生成する。
なお、検出誤差を収束させるため、好ましくは、フーリエ変換の各成分の大きさ(スペクトル)に、ゲイン(利得)を乗じて積算する。収束した各次成分の正弦波および各次成分の余弦波を加算して、誤差角度データを算出して推定角度誤差信号とする。
生成したこの誤差波形信号が、後述する推定角度生成回路14において、ロータ巻線6および角度検出器11で検出された角度検出信号を補正するための推定角度誤差信号S13である。
角度誤差推定器13は、ハイパスフィルタ部25と、m分割角度毎速度リップルデータ作成部26と、フーリエ変換部27と、各次係数積算部28と、m分割誤差データ作成部29とを有する。
図12はハイパスフィルタ部25から出力されるAC成分速度検出信号S25と、角度検出信号S11とを示すグラフである。図12において横軸は角度を示し、縦軸はそれぞれの角度領域における信号の振幅を示す。
図12において、角度検出信号S11は、0度から360度に向かって増加し、360度に達すると0にリセットされ、再び、0度から360度に向かって増加する鋸歯状の信号として図解されている。
ハイパスフィルタ部25は、たとえば、アナログのハイパスフィルタ部25である。
なお、同じ領域で何回もサンプリングできる場合は、その平均値を用いて、精度を高めることができる。
一般的なフーリエ変換を下記の式(1−1)〜(1−4)に示す。

すなわち、フーリエ変換部27は、速度波形信号f1 ’ (k)についてのm分割角度毎速度リップルデータS26について、式(6−1)、(6−2)の演算を行う。
なお、フーリエ変換部27におけるフーリエ変換は、主要次数成分について処理すればよく、全ての周波数範囲について行う必要はない。その結果、フーリエ変換部27、および、フーリエ変換部27以降の処理回路の構成は簡単になり、信号処理時間も短縮される。
また、フーリエ変換部27におけるフーリエ変換処理としては、たとえば、乗算処理を極力減らして演算処理速度を向上させる、高速フーリエ変換(FFT)技術を適用することができる。
図13は各次係数積算部28の回路構成例を示す図である。
各次係数積算部28はフーリエ変換部27において得られた各次数を積算する。
各次係数積算部28は、利得(ゲイン)乗算器30と、加算器32と、1サンプリングディレイ回路31とを有する。
利得乗算器30は、フーリエ変換係数S27として出力されたフーリエ変換によって得られたn次成分のフーリエ変換係数に利得(ゲイン)Rgを乗ずる。
なお、利得Rgは、本実施の形態においては、検出誤差を収束させるため、1より小さな値とする。利得Rgは、ノイズやばらつきを平均化して検出誤差が収束していくように、状態に合わせて調整することが望ましい。
このようにして得られたn次の各係数の積算値を含む各次係数積算値信号S28が、m分割誤差データ作成部29に出力される。
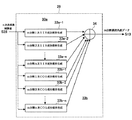
図14はm分割誤差角度データ作成部29の回路構成を示す図である。
m分割誤差角度データ作成部29は、m分割SIN成分波形生成部33aと、m分割COS成分波形生成部33bと、加算器34とを有する。
m分割SIN成分波形生成部33aは、各次係数積算部28から出力される各次係数積算値信号S28に含まれるn次成分の係数積算値に対応して設けられたn個のm分割n次SIN成分波形生成部、たとえば、m分割1次SIN成分波形生成部33a−1、m分割2次SIN成分波形生成部33a−2〜m分割n次SIN成分波形生成部33a−nを有する。
m分割COS成分波形生成部33bは、各次係数積算部28から出力される各次係数積算値信号S28に含まれるn次成分の係数積算値に対応して設けられたn個のm分割n次COS成分波形生成部、すなわち、m分割1次COS成分波形生成部33b−1、m分割2次COS成分波形生成部33b−2〜m分割n次COS成分波形生成部33b−nを有する。
m分割1次SIN成分波形生成部33a−1においては各次係数積分値信号S28に含まれる1次成分のフーリエ変換係数積算値を用いて1次のSIN成分の波形信号を生成する。
m分割2次SIN成分波形生成部33a−2においては各次係数積分値信号S28に含まれる2次成分のフーリエ変換係数積算値を用いて2次のSIN成分の波形信号を生成する。
以下同様に、m分割n次SIN成分波形生成部33a−nにおいては各次係数積分値信号S28に含まれるn次成分のフーリエ変換係数積算値を用いてn次のSIN成分の波形信号を生成する。
m分割1次COS成分波形生成部33b−1においては各次係数積分値信号S28に含まれる1次成分のフーリエ変換係数積算値を用いて1次のCOS成分の波形信号を生成する。
m分割2次COS成分波形生成部33b−2においては各次係数積分値信号S28に含まれる2次成分のフーリエ変換係数積算値を用いて2次のCOS成分の波形信号を生成する。
以下、同様に、m分割n次COS成分波形生成部33b−nにおいては各次係数積分値信号S28に含まれるn次成分のフーリエ変換係数積算値を用いてn次のCOS成分の波形信号を生成する。
図11〜図14を参照して述べた、角度検出器11で検出した角度検出信号S11と、速度検出器12で検出した回転速度信号S12とを用いて推定角度誤差信号S13を生成する角度誤差推定器13の全体動作を整理して述べる。
ハイパスフィルタ部25において検出誤差を含む速度検出信号S12のAC成分を通過させたAC成分速度検出信号S25を生成し、m分割角度毎速度リップルデータ作成部26において角度検出信号S11に基づいて検出誤差を含むAC成分速度検出信号S25をm領域に分割してm分割角度毎速度リップルデータS26を生成する。
フーリエ変換部27において、検出誤差を含むm分割角度毎速度リップルデータS26をフーリエ変換して、フーリエ変換係数S27を生成する。
各次係数積算部28がフーリエ変換係数S27に含まれる各次数のフーリエ変換係数を積分して、各次係数積算値信号S28を算出する。
m分割誤差角度データ作成部29が各次係数積算値信号S28を合成して推定角度誤差信号S13を生成する。
図15は推定角度生成回路14の回路構成を示す図である。
推定角度生成回路14は、角度検出器11から出力される検出誤差を含んでいる角度検出信号S11を、角度誤差推定器13から出力される推定角度誤差信号S13で補正して推定角度検出信号S14を生成する。
推定角度生成回路14は、テーブル番号取得部35と、誤差角度データ参照部36と、減算部37とを有する。
テーブル番号取得部35は、角度検出信号S11から誤差角度データ格納部36aに格納された推定角度誤差信号S13を読み出すためのアドレス信号S35を生成する。
誤差角度データ参照部36は、アドレス信号S35に基づいて誤差角度データ格納部36aから対応する誤差角度データS36を読みだす。
減算部37は、角度検出信号S11から誤差角度データS36を減じて角度検出信号S11を補正し、推定角度検出信号S14を生成する。なお、減算器37に代えて、加算器を用いて、角度検出信号S11に誤差角度データS36を加算して角度検出信号S11を補正することもできる。
角度誤差推定器13は比較的処理時間のかかるフーリエ変換部27を含むが、実時間で角度を検出するより前の事前処理であるので、実際に角度を補正する上で処理時間的な負担とはならない。
回転角度検出対象の角度を実時間で得るとき、図6に示した推定角度生成回路14において、上述して得られた推定角度誤差信号S13を用いて角度検出信号S11を補正するだけであるから、実時間に対応できる。すなわち、本発明の実施の形態のレゾルバの角度検出装置によれば、実時間で精度のよい角度(または回転位置)信号を提供することができる。すなわち、実時間で誤差角度データS36を生成することができ、それを用いて実時間で回転角度検出対象の角度センサとして使用することができる。
このように、本実施の形態は、特許文献1に記載された技術では得られない、実時間で精度のよい角度検出が可能である。
そのような周波数分析技術としては、たとえば、離散コサイン変換など演算時間を短縮した公知の技術を適用することができる。
1相励磁2出力方式のレゾルバ装置においては、図6において、正弦波励磁電圧がロータ巻線6に印加されて、ロータ巻線6と固定子の角度θによって正弦波励磁電圧が振幅変調された電圧が、SIN巻線4およびCOS巻線5で検出される。
1相励磁2出力方式のレゾルバにおいて、SIN巻線4およびCOS巻線5で検出された信号から、角度信号を検出する方法は、公知の方法、たとえば、特許文献1に記載された方法と同様の方法で行うことができる。
検出した角度検出信号S11から速度検出信号S12を生成する方法以下の方法および装置構成は、上述したと同じである。
そのようにして推定角度誤差信号S13を算出し、その推定角度誤差信号S13を用いて検出角度を補正することにより、1相励磁2出力方式のレゾルバについても、精度の高い角度信号を、実時間で提供することができる。
本発明の第2実施の形態について述べる。
第2実施の形態は、上述した第1実施の形態を改良したものである。
図13に図解したm分割角度毎速度リップルデータ作成部26は、角度検出器11から入力された角度検出信号S11とAC成分速度検出信号S25とを入力して、図11に例示した、0度から360度に変化する角度検出信号S11に基づいて、検出誤差成分を含むAC成分速度検出信号S25を複数領域、たとえば、m領域に分割し、分割した各領域毎のAC成分速度検出信号S25の速度リップル(変動)値を算出して、m分割角度毎速度リップルデータS26として出力する。
しかしながら、角度検出信号S11とAC成分速度検出信号S25とを用いて速度リップル値を求めると、速度リップル値が変動し、周期関数とならず、フーリエ変換部27において正確にフーリエ変換処理ができない場合が生ずることがある。
第2実施の形態はこの不具合を改善する。
図17は、図16の拡大図を示す。
第2実施の形態において、角度誤差推定器13Aは、角度検出器11で検出した角度検出信号S11を用いてロータ巻線6で検出した検出誤差を含む検出角度の内の検出誤差を推定して推定角度誤差信号S13Aを出力する。
第2実施の形態の角度誤差推定器13Aの詳細は図18を参照して述べる。
図18に図解した角度誤差推定器13Aは、m分割角度毎速度リップルデータ作成部26Aと、フーリエ変換部27Aと、各次係数積算部28と、m分割誤差データ作成部29とを有する。
図11に図解した角度誤差推定器13と対比すると、図18に図解した角度誤差推定器13Aは、ハイパスフィルタ部25を有さず、速度検出データS12を用いない。
したがって、第2実施の形態のレゾルバの角度検出装置100Aは、図19に図解したように、速度検出器12を有せず、速度検出器12から速度検出信号S12が角度誤差推定器13Aに入力されない構成となる。
図17に図解のように、位置理想値41は、角度検出信号S11のデータ1点を始点として、1サンプリング毎に進む理論パルス数41aをサンプリング毎に加算した値である。m分割角度毎速度リップルデータ作成部26Aにおいて位置理想値41を算出する。
m分割角度毎速度リップルデータ作成部26Aにおいて、位置理想値41は0以上で(m−1)以下の制限を設け、理想位置値41と角度検出信号S11との差を求めて位置誤差40を求め、さらに、位置誤差40を微分して速度リップル信号S26Aを求める。
なお、この実施の形態においては、m分割した検出位置がゼロクロスした直後の角度検出信号S11を初期値とした。
このとき、検出角度誤差波形を式(2 1)の関数f(x)とすることにより、各計数
は、式(2 2)〜(2−4)で表すことができる。
このように、フーリエ変換部27Aを上述した算出式に変更することにより、フーリエ変換処理を行う。
すなわち、フーリエ変換部27Aは、リップルデータS26Aについて、式(6−1)、(6−2)の演算を行う。
なお、フーリエ変換部27Aにおけるフーリエ変換は、主要次数成分について処理すればよく、全ての周波数範囲について行う必要はない。その結果、フーリエ変換部27、および、フーリエ変換部27以降の処理回路の構成は簡単になり、信号処理時間も短縮される。
また、フーリエ変換部27Aにおけるフーリエ変換処理としては、たとえば、乗算処理を極力減らして演算処理速度を向上させて、高速フーリエ変換(FFT)技術を適用することができる。
利得乗算器30は、フーリエ変換係数S27として出力されたフーリエ変換によって得られたn次成分のフーリエ変換係数に利得(ゲイン)Rgを乗ずる。なお、利得Rgは、本実施の形態においては、検出誤差を収束させるため、1より小さな値とする。また、利得Rgは、ノイズやばらつきを平均化して検出誤差が収束していくように、状態に合わせて調整することが望ましい。
加算器32と1サンプリングディレイ回路31とで積分回路を構成している。例えば、1サンプリングディレイ回路31は前回の値を保持しているメモリまたはレジスタとして構成され、加算器32において利得乗算器30からの今回の出力値と、1サンプリングディレイ回路31からの前回の加算器32とを加算することにより、利得乗算器30からの結果を積分する。
このようにして得られたn次の各係数の積算値を含む各次係数積算値信号S28が、m分割誤差データ作成部29に出力される。
m分割SIN成分波形生成部33aは、各次係数積算部28から出力される各次係数積算値信号S28に含まれるn次成分の係数積算値に対応して設けられたn個のm分割n次SIN成分波形生成部、たとえば、m分割1次SIN成分波形生成部33a−1、m分割2次SIN成分波形生成部33a−2〜m分割n次SIN成分波形生成部33a−nを有する。
同様に、m分割COS成分波形生成部33bは、各次係数積算部28から出力される各次係数積算値信号S28に含まれるn次成分の係数積算値に対応して設けられたn個のm分割n次COS成分波形生成部、すなわち、m分割1次COS成分波形生成部33b−1、m分割2次COS成分波形生成部33b−2〜m分割n次COS成分波形生成部33b−nを有する。
m分割1次SIN成分波形生成部33a−1においては各次係数積分値信号S28に含まれる1次成分のフーリエ変換係数積算値を用いて1次のSIN成分の波形信号を生成する。
m分割2次SIN成分波形生成部33a−2においては各次係数積分値信号S28に含まれる2次成分のフーリエ変換係数積算値を用いて2次のSIN成分の波形信号を生成する。
以下同様に、m分割n次SIN成分波形生成部33a−nにおいては各次係数積分値信号S28に含まれるn次成分のフーリエ変換係数積算値を用いてn次のSIN成分の波形信号を生成する。
m分割1次COS成分波形生成部33b−1においては各次係数積分値信号S28に含まれる1次成分のフーリエ変換係数積算値を用いて1次のCOS成分の波形信号を生成する。
m分割2次COS成分波形生成部33b−2においては各次係数積分値信号S28に含まれる2次成分のフーリエ変換係数積算値を用いて2次のCOS成分の波形信号を生成する。
以下、同様に、m分割n次COS成分波形生成部33b−nにおいては各次係数積分値信号S28に含まれるn次成分のフーリエ変換係数積算値を用いてn次のCOS成分の波形信号を生成する。
m分割角度毎速度リップルデータ作成部26Aにおいて角度検出信号S11に基づいて基準位置40に対する位置誤差を微分したm分割角度毎速度リップルデータS26Aを生成する。
フーリエ変換部27Aにおいて、m分割角度毎速度リップルデータS26Aをフーリエ変換して、フーリエ変換係数S27を生成する。
各次係数積算部28がフーリエ変換係数S27に含まれる各次数のフーリエ変換係数を積分して、各次係数積算値信号S28を算出する。
m分割誤差角度データ作成部29が各次係数積算値信号S28を合成して推定角度誤差信号S13を生成する。
角度誤差推定器13は比較的処理時間のかかるフーリエ変換部27Aを含むが、実時間で角度を検出するより前の事前処理であるので、実際に角度を補正する上で処理時間的な負担とはならない。
回転角度検出対象の角度を実時間で得るとき、推定角度生成回路14において、上述して得られた推定角度誤差信号S13を用いて角度検出信号S11を補正するだけであるから、実時間に対応できる。
このように、本発明の第2実施の形態のレゾルバの角度検出装置によれば、実時間で精度のよい角度(または回転位置)信号を提供することができる。すなわち、実時間で誤差角度データS36を生成することができ、それを用いて実時間で回転角度検出対象の角度センサとして使用することができる。
以上から、レゾルバの角度検出装置100Aを、サーボモータの角度センサとして堅牢なレゾルバを用いた場合でも、利用者が実機の運転において検出誤差を補正することが可能となる。
そのような周波数分析技術としては、たとえば、離散コサイン変換など演算時間を短縮した公知の技術を適用することができる。
したがって、本発明の上述した技術思想を適用した種々の変形態様を当業者はとることができるが、そのような変形態様も本願発明に含まれる。
4…SIN巻線、5…COS巻線、6…ロータ巻線、S6…ロータ巻線電圧
100:100A…レゾルバの角度検出装置
8…第1励磁電圧発生器、S8…SIN巻線電圧
9…第2励磁電圧発生器、S9…COS巻線電圧
10…受信フィルタ回路、
11…角度検出器、
17…基準波形生成回路、S17…基準波形信号
18…コンパレータ回路、S18…比較結果パルス信号
19…位相差カウント回路、
20…カウンタクロック発生器、S20…クロック信号
12…速度検出器12
23…1サンプリングディレイ回路、
24…減算回路、
13、13A…角度誤差推定器、S13…推定角度誤差信号、
25…ハイパスフィルタ部、
26、26A…m分割角度毎速度リップルデータ作成部、
27、27A…フーリエ変換部、S27…フーリエ変換係数
28…各次係数積算部、S28…各次係数積算値信号
30…利得(ゲイン)乗算器、
31…1サンプリングディレイ回路、
32…加算器、
29…m分割誤差角度データ作成部、S29…m分割誤差角度データ
33a…m分割SIN成分波形生成部、
33b…m分割COS成分波形生成部、
34…加算器、
14…推定角度生成回路、S14…推定角度検出信号、
35…テーブル番号取得部、
36…誤差角度データ参照部、
36a…誤差角度データテーブル、
37…減算部。
Claims (6)
- レゾルバにおいて検出された信号から角度信号を検出する角度検出器と、
前記検出された角度信号を参照して位置誤差を算出し、当該位置誤差を微分して速度誤
差信号を算出し、当該速度誤差信号を周波数分析して各周波数成分ごとの検出誤差を算出
し、算出した検出誤差を合成して推定角度誤差信号を生成する角度誤差推定器と、
前記生成した推定角度誤差信号を用いて前記検出された角度信号を補正する角度信号補
正回路と
を有する、レゾルバの角度検出装置。 - 前記角度誤差推定器は、前記周波数分析としてフーリエ変換を行う、
請求項1に記載のレゾルバの角度検出装置。 - 前記角度誤差推定器は、
位置理想値と、前記検出された角度信号を参照して位置誤差を算出し、当該位置誤差を
微分して速度誤差信号を算出して速度リップルを作成する、m分割角度毎速度データ作成
部と、
前記m分割角度毎速度データ作成部において生成されたm分割角度毎速度データについ
てフーリエ変換を行うフーリエ変換部と、
該フーリエ変換部においてフーリエ変換された結果について、各次の成分のフーリエ変
換係数を積算して各次係数積算値信号を算出する各次係数積算部と、
該各次係数積算部において算出された各次係数積算値信号を合成して前記推定角度誤差
信号を作成するm分割誤差角度データ作成部と
を有する、
請求項2に記載のレゾルバの角度検出装置。 - 前記各次係数積算部において、前記フーリエ変換係数より小さな利得を前記各次の成分
のフーリエ変換係数に乗じて、該乗じた値を積算して各次係数積算値信号を算出する、
請求項3に記載のレゾルバの角度検出装置。 - レゾルバにおいて検出された信号から角度信号を検出する工程と、
前記検出された角度信号を参照して位置誤差を算出し、当該位置誤差を微分して速度誤
差信号を算出し、当該速度誤差信号を周波数分析して各周波数成分ごとの検出誤差を算出
し、算出した検出誤差を合成して推定角度誤差信号を生成する工程と、
該生成した推定角度誤差信号を用いて前記検出された角度信号を補正する角度信号補正
工程と
を有するレゾルバの角度検出方法。 - SIN巻線と、COS巻線と、ロータ巻線とを有するレゾルバ本体と、
前記SIN巻線および前記COS巻線にそれぞれ励磁電圧を印加する励磁電圧印加部、
または、前記ロータ巻線に励磁電圧を印加する励磁電圧印加部と、
前記ロータ巻線から検出された信号、または、前記SIN巻線および前記COS巻線か
ら検出された信号から角度信号を検出する角度検出器と、
前記検出された角度信号を参照して位置誤差を算出し、当該位置誤差を微分して速度誤
差信号を算出し、当該速度誤差信号を周波数分析して各周波数成分ごとの検出誤差を算出
し、算出した検出誤差を合成して推定角度誤差信号を生成する角度誤差推定器と、
前記生成した推定角度誤差信号を用いて前記検出された角度信号を補正する角度信号補
正回路と
を有するレゾルバ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011002213A JP5281102B2 (ja) | 2011-01-07 | 2011-01-07 | レゾルバ装置、レゾルバの角度検出装置およびその方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011002213A JP5281102B2 (ja) | 2011-01-07 | 2011-01-07 | レゾルバ装置、レゾルバの角度検出装置およびその方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012145371A JP2012145371A (ja) | 2012-08-02 |
| JP5281102B2 true JP5281102B2 (ja) | 2013-09-04 |
Family
ID=46789086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011002213A Active JP5281102B2 (ja) | 2011-01-07 | 2011-01-07 | レゾルバ装置、レゾルバの角度検出装置およびその方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5281102B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2899874A1 (en) | 2014-01-27 | 2015-07-29 | Yamaha Hatsudoki Kabushiki Kaisha | Motor control device and correction data generation method in same |
| JPWO2021157000A1 (ja) * | 2020-02-06 | 2021-08-12 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015029098A1 (ja) | 2013-08-26 | 2015-03-05 | 三菱電機株式会社 | 位置検出器の角度誤差補正装置および角度誤差補正方法 |
| JP5822008B1 (ja) * | 2014-08-08 | 2015-11-24 | 日本精工株式会社 | 角度検出装置、この角度検出装置を備えるモータ、トルクセンサ、電動パワーステアリング装置及び自動車 |
| JP6595755B2 (ja) * | 2014-12-02 | 2019-10-23 | 日本電産サンキョー株式会社 | 補正テーブル作成装置、エンコーダ、及び補正テーブル作成方法 |
| WO2016117029A1 (ja) * | 2015-01-20 | 2016-07-28 | 三菱電機株式会社 | 位置検出器の角度誤差補正装置および角度誤差補正方法 |
| DE112015006001T5 (de) * | 2015-01-20 | 2017-10-26 | Mitsubishi Electric Corporation | Winkelfehlerkorrekturvorrichtung und Winkelfehlerkorrekturverfahren für einen Positionssensor |
| JP6589107B2 (ja) * | 2017-10-05 | 2019-10-16 | 有限会社ワイエスデイ | 変調波レゾルバ装置 |
| WO2020208766A1 (ja) | 2019-04-11 | 2020-10-15 | 三菱電機株式会社 | 電動機の制御装置 |
| JP7161439B2 (ja) * | 2019-04-23 | 2022-10-26 | ルネサスエレクトロニクス株式会社 | 半導体装置及びモータ制御システム |
| CN113091601B (zh) * | 2021-04-12 | 2023-03-24 | 上海大学 | 一种高速驱动电机旋变角位移测量误差测试方法 |
| US20240110777A1 (en) * | 2022-09-29 | 2024-04-04 | Allegro Microsystems, Llc | Sensor with estimated real-time parameter data |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005003672A (ja) * | 2003-05-19 | 2005-01-06 | Yaskawa Electric Corp | エンコーダ位置誤差解析装置 |
| JP5041419B2 (ja) * | 2007-12-28 | 2012-10-03 | 東芝機械株式会社 | レゾルバ装置およびレゾルバの角度検出装置とその方法 |
-
2011
- 2011-01-07 JP JP2011002213A patent/JP5281102B2/ja active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2899874A1 (en) | 2014-01-27 | 2015-07-29 | Yamaha Hatsudoki Kabushiki Kaisha | Motor control device and correction data generation method in same |
| US9507338B2 (en) | 2014-01-27 | 2016-11-29 | Yamaha Hatsudoki Kabushiki Kaisha | Motor control device and correction data generation method in same |
| TWI571043B (zh) * | 2014-01-27 | 2017-02-11 | 山葉發動機股份有限公司 | 馬達控制裝置及該裝置之修正資料製作方法 |
| JPWO2021157000A1 (ja) * | 2020-02-06 | 2021-08-12 | ||
| JP7209877B2 (ja) | 2020-02-06 | 2023-01-20 | 三菱電機株式会社 | 角度検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012145371A (ja) | 2012-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5041419B2 (ja) | レゾルバ装置およびレゾルバの角度検出装置とその方法 | |
| JP5281102B2 (ja) | レゾルバ装置、レゾルバの角度検出装置およびその方法 | |
| JP5173962B2 (ja) | レゾルバ/デジタル変換装置およびレゾルバ/デジタル変換方法 | |
| EP2209213B1 (en) | RD converter and angle detecting apparatus | |
| EP2827106B1 (en) | Angle detection device | |
| JP5802588B2 (ja) | 角度検出装置およびモータ駆動制御装置 | |
| JP6005781B2 (ja) | レゾルバ装置 | |
| JP6661267B2 (ja) | レゾルバ位置誤差を補償するための装置及び方法 | |
| JP4138899B2 (ja) | 位置検出のための位相差検出装置及び位置検出システム並びに方法 | |
| EP1804032A1 (en) | Encoder signal processor and processing method | |
| JP6272508B2 (ja) | 位置検出器の角度誤差補正装置および角度誤差補正方法 | |
| JP3372450B2 (ja) | エンコーダの出力信号処理装置 | |
| JP3893033B2 (ja) | 位置検出装置 | |
| JP2007107886A (ja) | エンコーダ誤差補正装置およびエンコーダ | |
| KR101335162B1 (ko) | 레졸버를 위한 위치 오차 보정 장치 및 보정 방법 | |
| JP2005257565A (ja) | レゾルバディジタル角度変換装置および方法ならびにプログラム | |
| JP2014202595A (ja) | 模擬レゾルバ及びレゾルバセンサ信号の作成方法 | |
| JP5865059B2 (ja) | 波形測定器 | |
| JP2009288241A (ja) | 第1の事象と第2の事象との間の時間差を求める方法 | |
| JP2009288241A6 (ja) | 第1の事象と第2の事象との間の時間差を求める方法 | |
| JP6305573B2 (ja) | 位置検出器の角度誤差補正装置および角度誤差補正方法 | |
| JP2014122885A (ja) | 角度検出装置 | |
| KR20080071508A (ko) | 진폭 검출 장치 | |
| JP3451851B2 (ja) | 回転速度検出装置 | |
| CN111699365B (zh) | 检测基于移动体的运动产生的位置变化量的方法以及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120725 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130523 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5281102 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |