JP6040242B2 - 自己安定型の太陽光追尾装置 - Google Patents
自己安定型の太陽光追尾装置 Download PDFInfo
- Publication number
- JP6040242B2 JP6040242B2 JP2014525517A JP2014525517A JP6040242B2 JP 6040242 B2 JP6040242 B2 JP 6040242B2 JP 2014525517 A JP2014525517 A JP 2014525517A JP 2014525517 A JP2014525517 A JP 2014525517A JP 6040242 B2 JP6040242 B2 JP 6040242B2
- Authority
- JP
- Japan
- Prior art keywords
- solar
- assemblies
- assembly
- solar tracking
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000000712 assembly Effects 0.000 claims description 50
- 238000000429 assembly Methods 0.000 claims description 50
- 238000004891 communication Methods 0.000 claims description 12
- 230000005484 gravity Effects 0.000 claims description 11
- 230000000087 stabilizing effect Effects 0.000 claims description 2
- 230000003287 optical effect Effects 0.000 description 24
- 239000004020 conductor Substances 0.000 description 8
- 238000009434 installation Methods 0.000 description 8
- 238000012423 maintenance Methods 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 240000001549 Ipomoea eriocarpa Species 0.000 description 2
- 235000005146 Ipomoea eriocarpa Nutrition 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000010079 rubber tapping Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- MARUHZGHZWCEQU-UHFFFAOYSA-N 5-phenyl-2h-tetrazole Chemical compound C1=CC=CC=C1C1=NNN=N1 MARUHZGHZWCEQU-UHFFFAOYSA-N 0.000 description 1
- JBRZTFJDHDCESZ-UHFFFAOYSA-N AsGa Chemical compound [As]#[Ga] JBRZTFJDHDCESZ-UHFFFAOYSA-N 0.000 description 1
- 241000196324 Embryophyta Species 0.000 description 1
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 1
- 229910000530 Gallium indium arsenide Inorganic materials 0.000 description 1
- 229910001335 Galvanized steel Inorganic materials 0.000 description 1
- 241001310793 Podium Species 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- HVMJUDPAXRRVQO-UHFFFAOYSA-N copper indium Chemical compound [Cu].[In] HVMJUDPAXRRVQO-UHFFFAOYSA-N 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000004512 die casting Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 239000008397 galvanized steel Substances 0.000 description 1
- 238000012804 iterative process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000000615 nonconductor Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images













Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S20/00—Supporting structures for PV modules
- H02S20/30—Supporting structures being movable or adjustable, e.g. for angle adjustment
- H02S20/32—Supporting structures being movable or adjustable, e.g. for angle adjustment specially adapted for solar tracking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M13/00—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S25/00—Arrangement of stationary mountings or supports for solar heat collector modules
- F24S25/10—Arrangement of stationary mountings or supports for solar heat collector modules extending in directions away from a supporting surface
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S30/40—Arrangements for moving or orienting solar heat collector modules for rotary movement
- F24S30/45—Arrangements for moving or orienting solar heat collector modules for rotary movement with two rotation axes
- F24S30/452—Vertical primary axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S50/00—Arrangements for controlling solar heat collectors
- F24S50/20—Arrangements for controlling solar heat collectors for tracking
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L31/00—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof
- H01L31/04—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof adapted as photovoltaic [PV] conversion devices
- H01L31/042—PV modules or arrays of single PV cells
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S20/00—Supporting structures for PV modules
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S20/00—Supporting structures for PV modules
- H02S20/10—Supporting structures directly fixed to the ground
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S30/00—Structural details of PV modules other than those related to light conversion
- H02S30/10—Frame structures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S25/00—Arrangement of stationary mountings or supports for solar heat collector modules
- F24S2025/01—Special support components; Methods of use
- F24S2025/012—Foldable support elements
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L31/00—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof
- H01L31/04—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof adapted as photovoltaic [PV] conversion devices
- H01L31/054—Optical elements directly associated or integrated with the PV cell, e.g. light-reflecting means or light-concentrating means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/40—Solar thermal energy, e.g. solar towers
- Y02E10/47—Mountings or tracking
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
- Y02E10/52—PV systems with concentrators
Description
本願は、2011年8月15日に出願された米国特許出願第61/523817号および2011年9月7日に出願された米国特許出願第61/532083号に基づく優先権を主張する。これら米国特許出願の全ての内容が、本明細書には援用されている。
本発明は、太陽光エネルギの分野に関し、特に追尾型太陽光パネルのアセンブリおよびそれらの配置に関する。
Claims (18)
- 太陽光追尾アセンブリを含むシステムであって、
相互接続される複数の太陽光追尾アセンブリを備え、
前記複数の太陽光追尾アセンブリの各々は、
複数のトラスによって相互接続される複数の脚アセンブリで構成されるフレームと、
複数の軸周りに動きを与える、複数の電機子アセンブリと、
前記フレームに取り付けられ、且つ、前記複数の電機子アセンブリとの通信を行う局所制御ユニットと、
前記複数の脚アセンブリの各々は、取付け端を有するシャフトを有し、
前記複数の電機子アセンブリは、対応する、前記脚アセンブリの前記取付け端にそれぞれ取り付けられており、
前記局所制御ユニットは、前記複数の電機子アセンブリの動作を制御し、
前記システムは、前記相互接続される複数の太陽光追尾アセンブリの各々に属する前記局所制御ユニットとの通信を行う広域制御ユニットをさらに備え、
前記広域制御ユニットは、前記局所制御ユニットへの指示、および/または、前記局所制御ユニットと通信を行う前記電機子アセンブリへの指示を与える、システム。 - 前記太陽光追尾アセンブリが、少なくとも1つの電流センサおよび/または電圧センサと、太陽位置データを得る太陽位置センサとを備え、
さらに、前記太陽光追尾アセンブリにおいて、前記局所制御ユニットが、前記少なくとも1つの電流センサおよび/または電圧センサから受信するデータの少なくとも1つと、最大出力点と、前記太陽位置データとに基づいて、前記複数の電機子アセンブリの動作を制御する、請求項1に記載のシステム。 - 前記広域制御ユニットが、前記局所制御ユニットに、前記複数の電機子アセンブリを水平な姿勢にさせる指示を送信する、請求項1に記載のシステム。
- 前記相互接続される複数の太陽光追尾アセンブリの各々が、組立てられた時点で、外部からバラストを加えなくても、前記フレームの重量によって十分安定する、請求項1に記載のシステム。
- 前記相互接続される複数の太陽光追尾アセンブリの各々が、組立てられた時点で、外部からバラストを加えなくても、前記フレームの重量と、前記複数の電機子アセンブリの重量とによって、十分安定する、請求項1に記載のシステム。
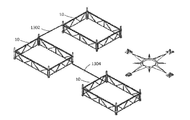
- 互いに隣接する前記太陽光追尾アセンブリに属する前記フレームは、所定の長さを有する少なくとも1つのスペーシングアームによって、互いに接続され、
前記少なくとも1つのスペーシングアームの一方の端部は、第1の太陽光追尾アセンブリをなす複数の脚アセンブリの1つに接続し、
前記少なくとも1つのスペーシングアームの他方の端部は、前記第1の太陽光追尾アセンブリに隣接する太陽光追尾アセンブリをなす複数の脚アセンブリの1つに接続する、請求項1に記載のシステム。 - 前記相互接続される複数の太陽光追尾アセンブリが、組立てられた時点で、前記複数の脚アセンブリの重量によって十分安定する、請求項6に記載のシステム。
- 前記フレームの前記脚アセンブリが直接地面に固定される、請求項1に記載のシステム。
- 前記複数の電機子アセンブリが、太陽光パネルに取付けられ、且つ、前記太陽光パネルを2つの軸の周りに回転させる、請求項1に記載のシステム。
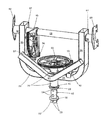
- 前記太陽光追尾アセンブリに属する前記複数の電機子アセンブリが、ヨークと、第1の駆動システムと、第2の駆動システムと、を備え、
前記ヨークは、
前記対応する、前記脚アセンブリの前記取付け端から延びる前記シャフトに取り付けられるヨーク取付け部と、
前記ヨーク取付け部に取り付けられる心棒と、を含み、
前記ヨーク取付け部は、前記シャフト上で、前記シャフトの軸によって定義される第1の軸の周りに回転可能であり、
前記心棒は、前記ヨーク取付け部上で、前記第1の軸に略垂直である第2の軸の周りに回転可能であり、
第1の駆動システムは、前記ヨークの、第1の軸の周りの回転を制御し、
第2の駆動システムは、前記心棒の、第2の軸の周りの回転を制御する、請求項1に記載のシステム。 - 前記太陽光追尾アセンブリが、太陽光パネルをさらに備え、
前記太陽光パネルは、複数の太陽光パネルモジュールを備え、
前記複数の太陽光パネルモジュールは、互いにずれた関係で、且つ、前記太陽光パネルの重心が前記心棒に沿って略一直線に並ぶように、取り付けられる、請求項10に記載のシステム。 - 前記太陽光追尾アセンブリが、4つの電機子アセンブリのうちの対応するそれぞれに取り付けられた、4つの太陽光パネルを備え、
前記4つの電機子アセンブリと、前記4つの太陽光パネルとが、4つの太陽光追尾ユニットを形成しており、
前記4つの太陽光追尾ユニットは、それらの2つずつが互いに直列接続された対を成し、得られた2つの対が互いに並列接続されるように、電気的に接続され、
前記4つの太陽光パネルのうちの少なくとも1つには、電流センサが設けられる、請求項11に記載のシステム。 - 前記太陽光追尾アセンブリにおいて、前記脚アセンブリは、地面と直接係合する調節可能な足部材をさらに備える、請求項1に記載のシステム。
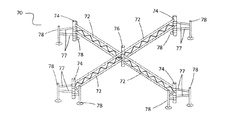
- 前記太陽光追尾アセンブリにおいて、前記複数のトラスの各々は、上方のコード部材と、下方のコード部材と、これらの間に取り付けられた複数のトラス部材とを備え、
前記複数のトラス部材は、前記上方および下方のコード部材の支持および安定化のためであり、
前記複数の脚アセンブリの各々は、少なくとも第1フランジユニットと、第2フランジユニットとをさらに備え、
これらのフランジユニットの各々は、前記シャフトの長さ方向における所定位置から放射状に延びた複数のフランジを備え、
前記第1フランジユニットは、前記複数のトラスの少なくとも1つに属する前記下方のコード部材と並ぶ位置に配され、
前記第2フランジユニットは、第1フランジユニットから離間すると共に、前記複数のトラスの少なくとも1つに属する前記上方のコード部材と並べられ、
前記フランジの各々は、それを貫通する貫通孔を少なくとも1つ有し、
前記フレームは、前記複数のトラスを前記複数の脚アセンブリにヒンジ接続させる複数の留め具をさらに備え、
前記複数の留め具の各々は、前記複数のトラスの1つに属する前記上方のコード部材または前記下方のコード部材を、関連するフランジに、そのフランジに設けられた貫通孔を介して接続させる、請求項1に記載のシステム。 - 前記太陽光追尾アセンブリが、前記複数のトラスの少なくとも1つに属する前記上方のコード部材および前記下方のコード部材の少なくとも1つに挿通された、ケーブル、ワイヤ、およびホースの少なくとも1つをさらに備える、請求項14に記載のシステム。
- 前記太陽光追尾アセンブリに属する前記フレームが三角状の形態となるように相互接続された前記脚アセンブリを3つ備える、請求項1に記載のシステム。
- 前記太陽光追尾アセンブリに属する前記フレームが平行四辺形となるように相互接続された前記脚アセンブリを4つ備える、請求項1に記載のシステム。
- 前記太陽光追尾アセンブリに属する前記フレームがX状の形態となるように相互接続された前記脚アセンブリを4つ備える、請求項1に記載のシステム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161523817P | 2011-08-15 | 2011-08-15 | |
| US61/523,817 | 2011-08-15 | ||
| US201161532083P | 2011-09-07 | 2011-09-07 | |
| US61/532,083 | 2011-09-07 | ||
| PCT/IB2012/052723 WO2013024369A1 (en) | 2011-08-15 | 2012-05-30 | Self-ballasted apparatus for solar tracking |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014527794A JP2014527794A (ja) | 2014-10-16 |
| JP2014527794A5 JP2014527794A5 (ja) | 2015-06-18 |
| JP6040242B2 true JP6040242B2 (ja) | 2016-12-07 |
Family
ID=46640707
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014525517A Expired - Fee Related JP6040242B2 (ja) | 2011-08-15 | 2012-05-30 | 自己安定型の太陽光追尾装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US8981201B2 (ja) |
| JP (1) | JP6040242B2 (ja) |
| CN (1) | CN103858336B (ja) |
| SA (1) | SA113340604B1 (ja) |
| WO (1) | WO2013024369A1 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10277159B2 (en) | 2008-11-17 | 2019-04-30 | Kbfx Llc | Finished multi-sensor units |
| US11063553B2 (en) | 2008-11-17 | 2021-07-13 | Kbfx Llc | Solar carports, solar-tracking carports, and methods |
| WO2013024369A1 (en) * | 2011-08-15 | 2013-02-21 | Morgan Solar Inc. | Self-ballasted apparatus for solar tracking |
| US10965241B2 (en) * | 2012-02-05 | 2021-03-30 | Tien Solar LLC | Solar plant support structure |
| MX361665B (es) * | 2012-11-09 | 2018-12-13 | Univ Stellenbosch | Estructura de soporte para heliostatos múltiples. |
| FR2998684B1 (fr) * | 2012-11-28 | 2014-11-21 | Soitec Solar Gmbh | Controle d'un dispositif traqueur solaire |
| TWM483397U (zh) * | 2014-01-28 | 2014-08-01 | Sun Rise E & T Corp | 用於安裝太陽能板的組合式基座 |
| US20170191700A1 (en) * | 2014-03-28 | 2017-07-06 | Vast Solar Pty Ltd | Apparatus and method for heliostat support |
| US10727781B2 (en) * | 2014-12-24 | 2020-07-28 | Ecolibrium Solar, Inc. | Low-sloped roof solar mounting systems |
| AU2016202007B2 (en) * | 2015-04-07 | 2020-07-09 | Stellenbosch University | Frame supported height adjustable pylon |
| AU2016202006B2 (en) * | 2015-04-07 | 2020-05-21 | Stellenbosch University | Supporting frame assembly |
| USD768282S1 (en) * | 2015-05-27 | 2016-10-04 | Alva Alta Lda | Structural support for solar envelope and solar collector |
| AT517705B1 (de) | 2015-10-02 | 2017-04-15 | Smart Flower Energy Tech Gmbh | Schwenk- und Fächerantrieb für Solarpaneele |
| CN105763137B (zh) * | 2016-02-18 | 2018-04-13 | 天津中环新能源有限公司 | 一种采用塔式太阳能发电技术的太阳能发电系统 |
| JP2017227408A (ja) * | 2016-06-24 | 2017-12-28 | 株式会社SolarFlame | ヘリオスタット装置 |
| JP2017229195A (ja) * | 2016-06-24 | 2017-12-28 | 株式会社SolarFlame | 太陽光発電方法 |
| WO2017222026A1 (ja) * | 2016-06-24 | 2017-12-28 | 株式会社SolarFlame | ヘリオスタット装置および太陽光発電方法 |
| US20200185557A1 (en) | 2017-05-16 | 2020-06-11 | Morgan Solar Inc. | Device for harvesting sunlight |
| US10615738B2 (en) * | 2018-04-10 | 2020-04-07 | Barry Sgarrella | Photovoltaic solar array support structure |
| MA62204B1 (fr) * | 2018-07-06 | 2023-10-31 | Kbfx Llc | Abris d'auto à suivi solaire |
| WO2020100181A1 (ja) * | 2018-11-12 | 2020-05-22 | 株式会社一 | 太陽光発電装置 |
| WO2020198803A1 (en) * | 2019-04-04 | 2020-10-08 | Vast Solar Pty Ltd | Assembly and method for attaching a heliostat to a foundation |
| US11271517B2 (en) * | 2019-06-18 | 2022-03-08 | Herbert Martin | Photovoltaic-based solar tracking system for solar concentrator |
| US11444570B2 (en) | 2020-02-28 | 2022-09-13 | OffGrid Power Solutions, LLC | Modular solar skid with enclosures |
| CN112556278B (zh) * | 2020-12-31 | 2022-12-06 | 池州市金能供热有限公司 | 一种太阳能节能环保制冷装置 |
Family Cites Families (81)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3153789A (en) * | 1957-06-07 | 1964-10-20 | Edward L Ashton | Large aperture steerable trunnionmounted paraboloidal antenna |
| US4063543A (en) | 1976-08-12 | 1977-12-20 | John Henry Hedger | Servo tracking apparatus |
| US4245616A (en) | 1978-03-20 | 1981-01-20 | Wyland Richard R | Solar tracking device |
| US4429178A (en) | 1981-07-13 | 1984-01-31 | Acurex Solar Corporation | Solar tracking apparatus utilizing photovoltaic flat panels and method |
| US4456783A (en) | 1982-11-23 | 1984-06-26 | Polaroid Corporation | Multielement optical panel |
| JPS606912A (ja) | 1983-06-24 | 1985-01-14 | Takashi Mori | 太陽光収集装置 |
| US4870949A (en) | 1987-07-27 | 1989-10-03 | Butler Barry L | Wind resistant two axis tracker for energy or radiation concertrators |
| US4968355A (en) | 1989-04-14 | 1990-11-06 | Johnson Kenneth C | Two-axis tracking solar collector mechanism |
| DE9101423U1 (ja) * | 1990-03-02 | 1991-07-04 | Leitner Gmbh, 7050 Waiblingen, De | |
| DE4116894A1 (de) | 1991-05-23 | 1992-11-26 | Michael Brod | Steuereinheit zur erzeugung von nachfuehrsignalen |
| US5169456A (en) | 1991-10-22 | 1992-12-08 | Johnson Kenneth C | Two-axis tracking solar collector mechanism |
| US5851309A (en) | 1996-04-26 | 1998-12-22 | Kousa; Paavo | Directing and concentrating solar energy collectors |
| CN1153080C (zh) | 1998-10-26 | 2004-06-09 | 米德仪器公司 | 分布式智能全自动望远镜系统 |
| US6922283B2 (en) | 1999-10-26 | 2005-07-26 | Meade Instruments Corporation | Systems and methods for automated telescope alignment and orientation |
| US6498290B1 (en) | 2001-05-29 | 2002-12-24 | The Sun Trust, L.L.C. | Conversion of solar energy |
| US6870087B1 (en) | 2001-09-14 | 2005-03-22 | Patrick Gallagher | Assembly method and apparatus for photovoltaic module |
| US7554030B2 (en) | 2003-03-18 | 2009-06-30 | Sunpower Corporation, Systems | Tracking solar collector assembly |
| US6958868B1 (en) | 2004-03-29 | 2005-10-25 | John George Pender | Motion-free tracking solar concentrator |
| US7905227B2 (en) | 2004-03-30 | 2011-03-15 | Energy Innovations, Inc. | Self-ballasting solar collector |
| US7823583B2 (en) | 2004-03-30 | 2010-11-02 | Energy Innovations, Inc. | Solar collector mounting array |
| US7779599B2 (en) * | 2004-03-31 | 2010-08-24 | Safway Services, Llc | Articulating work platform support system, work platform system, and methods of use thereof |
| WO2005119133A2 (en) | 2004-06-02 | 2005-12-15 | Energy Innovations, Inc. | Solar collector mounting array |
| ITMI20040384U1 (it) * | 2004-08-09 | 2004-11-09 | Extel S R L | Struttura di ricovero per autoveicoli motoveicoli e simili avente funzionalita' migliorata |
| ES2253099B1 (es) | 2004-09-03 | 2007-05-01 | Manuel Lahuerta Romeo | Seguidor solar. |
| ES2325386B1 (es) * | 2005-02-09 | 2010-06-14 | Vicente Fernandez Manso | Instalacion para posicionamiento automatizado de paneles captadores de energia solar. |
| US7388348B2 (en) | 2005-07-15 | 2008-06-17 | Mattichak Alan D | Portable solar energy system |
| US7252083B2 (en) | 2005-07-18 | 2007-08-07 | Arizona Public Service Company | Structure for supporting energy conversion modules and solar energy collection system |
| JP5171001B2 (ja) * | 2005-09-30 | 2013-03-27 | 三洋電機株式会社 | 太陽電池モジュールの製造方法、太陽電池セルおよび太陽電池モジュール |
| WO2007091119A1 (en) | 2006-02-07 | 2007-08-16 | Sunday Solar Technologies Pty Ltd | Electromagnetic radiation collection device |
| WO2007106519A2 (en) | 2006-03-13 | 2007-09-20 | Green Volts, Inc. | Tracking solar power system |
| US20070272826A1 (en) | 2006-05-25 | 2007-11-29 | Atomic Energy Council-Institute Of Nuclear Energy Research | Solar tracker stand |
| WO2008008787A2 (en) * | 2006-07-10 | 2008-01-17 | Hkd International (Hk) Limited | Adjustable support assembly for a collapsible canopy |
| US20080053032A1 (en) * | 2006-08-31 | 2008-03-06 | Hockemeyer Timothy J | Support column system for emergency isolation and treatment shelter (EITS) |
| WO2008096029A1 (es) | 2007-02-09 | 2008-08-14 | Consejo Superior De Investigaciones Científicas | Seguidor solar hidráulico de dos ejes |
| ES1065033Y (es) * | 2007-03-09 | 2007-09-01 | De La Rocha Justino Magan | Seguidor solar a dos ejes sobre plataforma rodante, con dos tableros portapaneles |
| WO2008121870A1 (en) * | 2007-03-29 | 2008-10-09 | Arizona Public Service Company | System for supporting energy conversion modules |
| CN101680685B (zh) | 2007-03-30 | 2012-11-14 | 亿索乐公司 | 有集成的基于图像的追踪控制器的定日镜 |
| US20080258051A1 (en) | 2007-04-11 | 2008-10-23 | Solfocus, Inc. | Equipment and Process for Measuring the Precision of Sun Tracking for Photovoltaic Concentrators |
| KR100819861B1 (ko) * | 2007-04-19 | 2008-04-08 | 다울이엔씨(주) | 태양광 추적장치 |
| EP2174058A4 (en) | 2007-05-01 | 2011-10-26 | Morgan Solar Inc | ILLUMINATION DEVICE |
| US9040808B2 (en) | 2007-05-01 | 2015-05-26 | Morgan Solar Inc. | Light-guide solar panel and method of fabrication thereof |
| DE602008004902D1 (de) | 2007-05-17 | 2011-03-24 | Solergy Inc | Systeme und verfahren zur lichtenergieumwandlung |
| WO2008154521A1 (en) | 2007-06-08 | 2008-12-18 | Esolar, Inc. | Solar collector system for solar thermal applications |
| US20090032089A1 (en) | 2007-08-03 | 2009-02-05 | Atomic Energy Council - Institute Of Nuclear Energy Research | Solar tracker having louver frames |
| WO2009048879A2 (en) | 2007-10-12 | 2009-04-16 | Megawatt Solar, Inc. | Methods, systems, and computer readable media for controlling orientation of a photovoltaic collection system to track apparent movement of the sun |
| WO2009055624A1 (en) | 2007-10-24 | 2009-04-30 | Esolar, Inc. | Calibration and tracking control of heliostats in a central tower receiver solar power plant |
| WO2009057551A1 (ja) * | 2007-11-02 | 2009-05-07 | Konica Minolta Opto, Inc. | 光学素子 |
| US20090266395A1 (en) | 2007-11-08 | 2009-10-29 | Sunrgi | Solar concentration and cooling devices, arrangements and methods |
| BRPI0820188A2 (pt) | 2007-11-08 | 2017-05-09 | Sunrgi | estruturas e métodos concentradores de luz. |
| EP2060928A1 (en) | 2007-11-15 | 2009-05-20 | The Technology Partnership Plc | Light tracking device |
| ITAQ20080009A1 (it) * | 2008-06-12 | 2009-12-13 | Yoav Banin | Sistema secondario di attuazione per il puntamento di precisione, montato su tracker per sistemi a concentrazione solare, in grado di effettuare rotazioni spaziali al fine di assicurare l'allineamento con i raggi solari del concentratore o gruppi di |
| US8088994B2 (en) | 2007-12-21 | 2012-01-03 | Solergy, Inc. | Light concentrating modules, systems and methods |
| US8609977B2 (en) | 2008-01-29 | 2013-12-17 | Sunpower Corporation | Self ballasted celestial tracking apparatus |
| US7705277B2 (en) * | 2008-02-04 | 2010-04-27 | Envision Solar, Llc | Sun tracking solar panels |
| WO2009122450A1 (en) | 2008-03-31 | 2009-10-08 | Pirelli & C.S.P.A. | Sun tracker device |
| US20090250095A1 (en) | 2008-04-05 | 2009-10-08 | Brent Perry Thorley | Low-profile solar tracking module |
| US20090260619A1 (en) * | 2008-04-20 | 2009-10-22 | The Boeing Company | Autonomous heliostat for solar power plant |
| US20090261802A1 (en) | 2008-04-22 | 2009-10-22 | Solfocus, Inc. | Simulator system and method for measuring acceptance angle characteristics of a solar concentrator |
| US20100263659A9 (en) | 2008-06-02 | 2010-10-21 | Pv Trackers, Llc | Solar tracker system and method of making |
| US20100018518A1 (en) | 2008-07-24 | 2010-01-28 | Mcdonald Mark | Determination of solar tracking error |
| US7895017B2 (en) | 2008-07-24 | 2011-02-22 | Solfocus, Inc. | System to increase SNR of CPV-generated power signal |
| ES2425080T3 (es) * | 2008-08-21 | 2013-10-11 | Nabtesco Corporation | Dispositivo de transmisión de engranajes y dispositivo de generación de energía solar |
| US20100043870A1 (en) * | 2008-08-25 | 2010-02-25 | Bennett James D | Solar panel monitoring system |
| US20100051017A1 (en) | 2008-08-28 | 2010-03-04 | Qiang Xie | Global solar tracking system |
| WO2010025550A1 (en) | 2008-09-04 | 2010-03-11 | Morgan Solar Inc. | Staggered light collectors for concentrator solar panels |
| US8188414B2 (en) | 2008-12-23 | 2012-05-29 | Opel, Inc. | Grid support system for a tracker-mounted solar panel array for rooftop applications |
| CN102308159A (zh) | 2009-01-22 | 2012-01-04 | 茵斯派德外科技术公司 | 致动的前馈控制的太阳能跟踪系统 |
| US8076625B2 (en) | 2009-02-25 | 2011-12-13 | Solfocus, Inc. | Field level tracker controller |
| US20100213761A1 (en) | 2009-02-25 | 2010-08-26 | Solfocus, Inc. | Field Level Inverter Controller |
| WO2010101468A1 (en) | 2009-03-02 | 2010-09-10 | Hans Gude Gudesen | Multi-element device |
| DE102009013113A1 (de) | 2009-03-13 | 2010-09-23 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren zum Nachführen eines Solargenerators nach der Sonne, Steuerung für eine Solaranlage und Solaranlage |
| US9995507B2 (en) | 2009-04-15 | 2018-06-12 | Richard Norman | Systems for cost-effective concentration and utilization of solar energy |
| CN201497914U (zh) * | 2009-08-11 | 2010-06-02 | 常州佳讯光电产业发展有限公司 | 太阳能能源站同步跟踪控制系统 |
| TWI424136B (zh) | 2009-08-24 | 2014-01-21 | Herng Jiunn Liao | 用於太陽能板之雙軸式太陽追蹤器系統與裝置 |
| US20110137466A1 (en) * | 2009-12-08 | 2011-06-09 | Miller Daniel H | Method, system, and controller for controlling heliostat mirrors |
| TWI414736B (zh) | 2010-02-02 | 2013-11-11 | Herng Jiunn Liao | 單軸式太陽追蹤器系統與裝置以及抗風鎖裝置 |
| CN102918660B (zh) | 2010-04-01 | 2015-11-25 | 摩根阳光公司 | 集成光伏模块 |
| US9978900B2 (en) * | 2011-05-13 | 2018-05-22 | Ormat Technologies, Inc. | Heliostat system and method of using same |
| WO2012170988A1 (en) * | 2011-06-10 | 2012-12-13 | University Of Houston | Portable, self-sustained solar deployment |
| WO2013024369A1 (en) * | 2011-08-15 | 2013-02-21 | Morgan Solar Inc. | Self-ballasted apparatus for solar tracking |
| CN111680799B (zh) | 2020-04-08 | 2024-02-20 | 北京字节跳动网络技术有限公司 | 用于处理模型参数的方法和装置 |
-
2012
- 2012-05-30 WO PCT/IB2012/052723 patent/WO2013024369A1/en active Application Filing
- 2012-05-30 JP JP2014525517A patent/JP6040242B2/ja not_active Expired - Fee Related
- 2012-05-30 CN CN201280050521.7A patent/CN103858336B/zh not_active Expired - Fee Related
-
2013
- 2013-05-30 SA SA113340604A patent/SA113340604B1/ar unknown
- 2013-08-08 US US13/962,566 patent/US8981201B2/en active Active
-
2015
- 2015-02-11 US US14/619,858 patent/US9960730B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013024369A4 (en) | 2013-05-16 |
| US8981201B2 (en) | 2015-03-17 |
| CN103858336B (zh) | 2017-12-08 |
| SA113340604B1 (ar) | 2015-10-05 |
| US9960730B2 (en) | 2018-05-01 |
| US20130319508A1 (en) | 2013-12-05 |
| CN103858336A (zh) | 2014-06-11 |
| US20150207453A1 (en) | 2015-07-23 |
| JP2014527794A (ja) | 2014-10-16 |
| WO2013024369A1 (en) | 2013-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6040242B2 (ja) | 自己安定型の太陽光追尾装置 | |
| US20140150845A1 (en) | Solar tracking apparatus and field arrangements thereof | |
| US8916811B2 (en) | Integrated electronics housing for a solar array | |
| US20240088822A1 (en) | Photovoltaic system and associated use | |
| CN101189732B (zh) | 用于光伏聚光模块的子模块、光伏聚光模块、太阳能装置和用于光伏聚光模块的包装方法和位置校准方法 | |
| US8671631B2 (en) | Panel mounting system | |
| US20160099673A1 (en) | Solar panel system with monocoque supporting structure | |
| US20110290306A1 (en) | Solar array configurations | |
| US9316417B2 (en) | Framing system for mounting solar collecting devices | |
| US20090032090A1 (en) | Method for assembling a terrestrial solar array including a rigid support frame | |
| KR100772043B1 (ko) | 추적식 태양광 발전기 | |
| JP2006210613A (ja) | 太陽光発電装置 | |
| US11632078B2 (en) | Advanced solar PV system with robotic assembly | |
| JP2002025314A (ja) | 発電機能を備えた照明柱 | |
| KR20110121016A (ko) | 태양 추적식 태양광 발전장치 | |
| WO2014048575A2 (en) | A utility pole assembly | |
| JP2015505232A (ja) | 低風抵抗自己バラスト装荷光電池モジュール取付システム | |
| US11585111B2 (en) | Solar carport | |
| JP2003008045A (ja) | 太陽電池アレイ及びその施工方法 | |
| TWI493148B (zh) | 太陽能收集器定位裝置 | |
| KR102359346B1 (ko) | 내구성이 강화된 태양광 추적용 연동형 동력전달장치 | |
| KR20170111947A (ko) | 태양 전지판 지지 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150423 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150423 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150423 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161018 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6040242 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |