JP6021227B2 - 建設機械の油圧駆動装置 - Google Patents
建設機械の油圧駆動装置 Download PDFInfo
- Publication number
- JP6021227B2 JP6021227B2 JP2013246803A JP2013246803A JP6021227B2 JP 6021227 B2 JP6021227 B2 JP 6021227B2 JP 2013246803 A JP2013246803 A JP 2013246803A JP 2013246803 A JP2013246803 A JP 2013246803A JP 6021227 B2 JP6021227 B2 JP 6021227B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- hydraulic pump
- torque
- discharge
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
- E02F9/2228—Control of flow rate; Load sensing arrangements using pressure-compensating valves including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/17—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors using two or more pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/025—Pressure reducing valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/026—Pressure compensating valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/06—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with two or more servomotors
- F15B13/08—Assemblies of units, each for the control of a single servomotor only
- F15B13/0803—Modular units
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
- E02F3/325—Backhoes of the miniature type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B20/00—Safety arrangements for fluid actuator systems; Applications of safety devices in fluid actuator systems; Emergency measures for fluid actuator systems
- F15B20/007—Overload
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20523—Internal combustion engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
- F15B2211/20553—Type of pump variable capacity with pilot circuit, e.g. for controlling a swash plate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20576—Systems with pumps with multiple pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/25—Pressure control functions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6652—Control of the pressure source, e.g. control of the swash plate angle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6655—Power control, e.g. combined pressure and flow rate control
Description
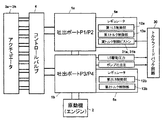
図1A、図1B及び図2は、本発明の第1の実施の形態に係わる油圧ショベル(建設機械)の油圧駆動装置を示す図であり、図1Aは油圧駆動装置全体を示す油圧回路図、図2は油圧駆動装置全体を示すブロック図である。図1Bは、図1A及び図2に示すトルクフィードバック回路の詳細を示す油圧回路図である。
τ4=(P4p×q2)/2π…(2)
前述したように、P3p,P4pは第3及び第4吐出ポートP3,P4の吐出圧であり、q2は第2油圧ポンプ1bのの傾転角である。
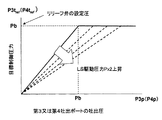
ここで、KはバネS3,S4のバネ定数と第2油圧ポンプ1bの傾転角q2(容量)の関係から決定される定数であり、図3に示した傾きKに相当する値である。
τ4=C(A×P4t)…(5)
ここで、Aは第1及び第2減トルク制御ピストン31a,31bの受圧面積であり、Cは比例定数である。
τ4=(P4p×(q2max−K×Px2))/2π=C(A×P4t)
変形すると、次の式になる。
P4t=((P4p×(q2max−K×Px2))/2π)/C×A
D=2π/C×Aと置き換えると、次の式になる。
P4t=D(P4p×(q2max−K×Px2))
D×q2maxが1となるようにAとCの値を設定すると、次の式になる。
P4t=P4p×(1−(K×Px2/D))…(7)
図6は、(6)式及び(7)式で表される第3及び第4吐出ポートの吐出圧P3p,P4pとトルク制御圧力P3t,P4tとLS駆動圧力Px2との関係を示す図である。
〜動作〜
次に、本実施の形態の動作を説明する。
<<第1油圧ポンプ1a側アクチュエータの単独駆動>>
第1油圧ポンプ1a側に接続されたアクチュエータの1つ、例えばアームシリンダ3aを単独で駆動してアーム動作を行うときは、アーム用の操作レバーを操作すると流量制御弁6a,6eが切り換わり、アームシリンダ3aに第1及び第2吐出ポートP1,P2の吐出油が合流して供給される。また、このとき前述したように、第1ロードセンシング制御部12aのロードセンシング制御と第1トルク制御部13aの吸収トルク一定制御により第1及び第2吐出ポートP1,P2の吐出流量が制御される。
第2油圧ポンプ1b側に接続されたアクチュエータの1つ、例えばブームシリンダ3hを単独で駆動してブーム動作を行うときは、ブーム用の操作レバーを操作すると流量制御弁6h,6lが切り換わり、ブームシリンダ3hに第3及び第4吐出ポートP3,P4の吐出油が合流して供給される。また、このとき前述したように、第2ロードセンシング制御部12bのロードセンシング制御と第2トルク制御部13bの吸収トルク一定制御により第3及び第4吐出ポートP3,P4の吐出流量が制御される。
<<アームシリンダとブームシリンダの同時駆動>>
アームシリンダ3aとブームシリンダ3hを同時に駆動してアーム307とブーム306の複合動作を行うときは、アーム用の操作レバーとブーム用の操作レバーを操作すると流量制御弁6a,6eと流量制御弁6h,6lが切り換わり、アームシリンダ3aに第1及び第2吐出ポートP1,P2の吐出油が合流して供給され、ブームシリンダ3hに第3及び第4吐出ポートP3,P4の吐出油が合流して供給される。また、第1油圧ポンプ1a側と第2油圧ポンプ1b側のそれぞれで、前述したように、第1及び第2ロードセンシング制御部12a,12bのロードセンシング制御と第1及び第2トルク制御部13a,13bの吸収トルク一定制御により、第1及び第2吐出ポートP1,P2の吐出流量と第3及び第4吐出ポートP3,P4の吐出流量が制御される。また、第1トルク制御部13aの吸収トルク一定制御では、図4Aに示した全トルク制御が行われる。
旋回モータ3cとブームシリンダ3hとを同時に駆動して上部旋回体300(旋回)とブーム306の複合動作を行うときは、旋回用の操作レバーとブーム用の操作レバーを操作するとと流量制御弁6dと流量制御弁6h,6lが切り換わり、旋回モータ3cに第2吐出ポートP2の吐出油が供給され、ブームシリンダ3hに第3及び第4吐出ポートP3,P4の吐出油が合流して供給される。また、第1油圧ポンプ1a側と第2油圧ポンプ1b側のそれぞれで、前述したように、第1及び第2ロードセンシング制御部12a,12bのロードセンシング制御と第1及び第2トルク制御部13a,13bの吸収トルク一定制御により、第1及び第2吐出ポートP1,P2の吐出流量と第3及び第4吐出ポートP3,P4の吐出流量が制御される。また、第1トルク制御部13aの吸収トルク一定制御では、図4Aに示した全トルク制御が行われる。流量制御弁6a〜6cが閉じられている側の第1吐出ポートP1の吐出油はアンロード弁10aを介してタンクに戻される。
第1油圧ポンプ1aの第1及び第2吐出ポートP1,P2のみに接続されるアクチュエータ(アームシリンダ3a、バケットシリンダ3b、旋回モータ3c)の少なくとも1つと、第2油圧ポンプ1bの第3及び第4吐出ポートP3,P4のみに接続されるアクチュエータ(スイングシリンダ3f、ブレードシリンダ3g、ブームシリンダ3h)の少なくとも1つを同時に駆動する上記以外の複合動作においても、上記と同様に、ロードセンシング制御と吸収トルク一定制御により、第1及び第2吐出ポートP1,P2の吐出流量と第3及び第4吐出ポートP3,P4の吐出流量が制御され、第1トルク制御部13aの吸収トルク一定制御では、図4Aに示した全トルク制御が行われる。流量制御弁が閉じられている側の吐出ポートの吐出油は対応するアンロード弁を介してタンクに戻される。
第1油圧ポンプ1aの第1吐出ポートP1に接続されるアクチュエータ(アームシリンダ3a、バケットシリンダ3b、走行右の走行モータ3e)の少なくとも1つと、第1油圧ポンプ1aの第2吐出ポートP2に接続されるアクチュエータ(アームシリンダ3a,旋回モータ3c、走行左の走行モータ3d)の少なくとも1つを同時に駆動する複合動作では、アームシリンダ3aを単独で駆動するアーム動作の場合と同様、第1ロードセンシング制御部12aのロードセンシング制御と第1トルク制御部13aの吸収トルク一定制御により第1及び第2吐出ポートP1,P2の吐出流量が制御される。また、要求流量の少ない側の吐出ポートの吐出油の余剰流量或いは流量制御弁が閉じられている側の吐出ポートの吐出油はアンロード弁を介してタンクに戻される。このとき、第1シャトル弁群8aによって検出された第1吐出ポートP1側のアクチュエータの負荷圧(最高負荷圧)が圧力補償弁7a〜7cと第1アンロード弁10aに導かれ、第2シャトル弁群8bによって検出された第2吐出ポートP2側のアクチュエータの負荷圧(最高負荷圧)が圧力補償弁7d〜7fと第2アンロード弁10bに導かれ、第1吐出ポートP1側と第2吐出ポートP2側とで別々に圧力補償弁とアンロード弁の制御が行われる。これにより低負荷圧側の吐出ポートの余剰流量がタンクに戻るとき、その吐出ポートの圧力は当該吐出ポート側のアンロード弁によって低い負荷圧に基づいて圧力上昇が制限されるため、余剰流量がタンクに戻るときのアンロード弁の圧損が低減し、エネルギーロスの少ない運転が可能となる。
第2油圧ポンプ1b側の2つのアクチュエータを同時に駆動する複合動作においても、上述した第1油圧ポンプ1a側の2つのアクチュエータを同時に駆動する複合動作の場合と同様、第2ロードセンシング制御部12bのロードセンシング制御と第2トルク制御部13bの吸収トルク一定制御により第3及び第4吐出ポートP3,P4の吐出流量が制御される。また、要求流量の少ない側の吐出ポートの吐出油の余剰流量或いは流量制御弁が閉じられている側の吐出ポートの吐出油はアンロード弁を介してタンクに戻され、このときのアンロード弁の圧損が低減し、エネルギーロスの少ない運転が可能となる。
走行左の走行モータ3dと走行右の走行モータ3eを駆動して走行動作を行うときは、左右の走行用操作レバー或いはペダルを操作すると流量制御弁6f,6jと流量制御弁6c,6gが切り換わり、走行左の走行モータ3dに第1油圧ポンプ1aの第2吐出ポートP2の吐出油と第2油圧ポンプ1bの第4吐出ポートP4の吐出油が合流して供給され、走行右の走行モータ3eに第1油圧ポンプ1aの第1吐出ポートP1の吐出油と第2油圧ポンプ1bの第3吐出ポートP3の吐出油が合流して供給される。このため、仮に、第1油圧ポンプ1aの斜板の傾転角と第2油圧ポンプ1bの斜板の傾転角が相違し、第1及び第2吐出ポートP1,Pと第3及び第4吐出ポートP3,P4で吐出流量の相違が発生したとしても、走行左の走行モータ3dの供給流量と走行右の走行モータ3eの供給流量は同じとなり、車体は蛇行せず、直進走行することができる。
走行右の供給流量:Q1+Q3
ここで、Q1=Q2(同一斜板のため)、Q3=Q4(同一斜板のため)の関係にある。したがって、仮にQ1=Q2≠Q3=Q4となったとしても、
Q2+Q4=Q1+Q3
の関係は成り立ち、走行左の走行モータ3dの供給流量と走行右の走行モータ3eの供給流量は同じとなる。
走行モータ3d,3eと他のアクチュエータの少なくとも1つ、例えばアームシリンダ3aとを同時に駆動する走行複合動作を行う場合について説明する。
走行左の供給流量Qe=(Q1+Q2−Qa)/2+(Q3+Q4)/2
すなわち、Qd=Qeであり、車体は蛇行せず、直進走行することができる。
次に、本実施の形態により得られる効果について説明する。
以上の実施の形態では、第1及び第2油圧ポンプが第1及び第2吐出ポートP1,P2及び第3及び第4吐出ポートP3,P4を有するスプリットフロータイプの油圧ポンプである場合について説明したが、第1及び第2油圧ポンプの両方或いは一方は単一の吐出ポートを有するシングルフロータイプの油圧ポンプであってもよい。第1及び第2油圧ポンプがシングルフロータイプの油圧ポンプである場合、トルクフィードバック回路30の回路部とトルク制御圧力が導かれる減トルク制御ピストンはそれぞれ1つづつあればよい。また、図4A及び図4Bの横軸は単一の吐出ポートの圧力(油圧ポンプの吐出圧)となる。
1b 第2油圧ポンプ
2 原動機(ディーゼルエンジン)
3a〜3h アクチュエータ
3a アームシリンダ
3d 走行左の走行モータ
3e 走行右の走行モータ
3h ブームシリンダ
4 コントロールバルブ
5a 第1ポンプ制御装置
5b 第2ポンプ制御装置
6a〜6m 流量制御弁
7a〜7m 圧力補償弁
8a 第1シャトル弁群
8b 第2シャトル弁群
8c 第3シャトル弁群
8d 第4シャトル弁群
9a〜9d バネ
10a〜10d アンロード弁
12a 第1ロードセンシング制御部
12b 第2ロードセンシング制御部
13a 第1トルク制御部
13b 第2トルク制御部
15a 第1連通制御弁
15b 第2連通制御弁
16a〜16d ロードセンシング制御弁
17a,17b ロードセンシング制御ピストン(ロードセンシング制御アクチュエータ)
18a 第1トルク制御ピストン(第1トルク制御アクチュエータ)
19a 第2トルク制御ピストン(第1トルク制御アクチュエータ)
18b 第3トルク制御ピストン(第2トルク制御アクチュエータ)
19b 第4トルク制御ピストン(第2トルク制御アクチュエータ)
21a,21b 低圧選択弁
30 トルクフィードバック回路
30a 第1トルクフィードバック回路部
30b 第2トルクフィードバック回路部
31a 第1減トルク制御ピストン(第3トルク制御アクチュエータ)
31b 第2減トルク制御ピストン(第3トルク制御アクチュエータ)
32a 第1トルク減圧弁
32b 第2トルク減圧弁
33a 第1分圧回路
33b 第2分圧回路
34a 第1分圧絞り部
34b 第2分圧絞り部
35a 第1分圧弁
35b 第1分圧弁
36a 第1油路
36b 第2油路
37a 第1リリーフ弁(圧力制限弁)
37b 第2リリーフ弁(圧力制限弁)
P1,P2 第1及び第2吐出ポート
P3,P4 第3及び第4吐出ポート
S1,S2 バネ
S3,S4 バネ
Claims (3)
- 原動機と、
前記原動機により駆動される可変容量型の第1油圧ポンプと、
前記原動機により駆動される可変容量型の第2油圧ポンプと、
前記第1及び第2油圧ポンプにより吐出された圧油により駆動される複数のアクチュエータと、
前記第1及び第2油圧ポンプから前記複数のアクチュエータに供給される圧油の流量を制御する複数の流量制御弁と、
前記複数の流量制御弁の前後差圧をそれぞれ制御する複数の圧力補償弁と、
前記第1油圧ポンプの吐出流量を制御する第1ポンプ制御装置と、
前記第2油圧ポンプの吐出流量を制御する第2ポンプ制御装置とを備え、
前記第1ポンプ制御装置は、
前記第1油圧ポンプの吐出圧と容量の少なくとも一方が増大し、前記第1油圧ポンプの吸収トルクが増大するとき、前記第1油圧ポンプの吸収トルクが第1最大トルクを超えないように前記第1油圧ポンプの容量を制御する第1トルク制御部を有し、
前記第2ポンプ制御装置は、
前記第2油圧ポンプの吐出圧と容量の少なくとも一方が増大し、前記第2油圧ポンプの吸収トルクが増大するとき、前記第2油圧ポンプの吸収トルクが第2最大トルクを超えないように前記第2油圧ポンプの容量を制御する第2トルク制御部と、
前記第2油圧ポンプの吸収トルクが前記第2最大トルクよりも小さいとき、前記第2油圧ポンプの吐出圧が前記第2油圧ポンプにより吐出された圧油により駆動されるアクチュエータの最高負荷圧より目標差圧だけ高くなるよう前記第2油圧ポンプの容量を制御するロードセンシング制御部とを有する建設機械の油圧駆動装置において、
前記第1トルク制御部は、前記第1油圧ポンプの吐出圧が導かれ、前記吐出圧の上昇時に前記第2油圧ポンプの容量を減少させ吸収トルクが減少するよう前記第1油圧ポンプの容量を制御する第1トルク制御アクチュエータと、前記第1最大トルクを設定する第1付勢手段とを有し、
前記第2トルク制御部は、前記第2油圧ポンプの吐出圧が導かれ、前記吐出圧の上昇時に前記第2油圧ポンプの容量を減少させ吸収トルクが減少するよう前記第2油圧ポンプの容量を制御する第2トルク制御アクチュエータと、前記第2最大トルクを設定する第2付勢手段とを有し、
前記ロードセンシング制御部は、
前記第2油圧ポンプの吐出圧と前記最高負荷圧との差圧が前記目標差圧よりも小さくなるにしたがって低くなるようロードセンシング駆動圧力を変化させる制御弁と、前記ロードセンシング駆動圧力が低くなるにしたがって前記第2油圧ポンプの容量を増加し吐出流量が増加するよう前記第2油圧ポンプの容量を制御するロードセンシング制御アクチュエータとを有し、
前記第1ポンプ制御装置は、更に、
前記第2油圧ポンプの吐出圧と前記ロードセンシング駆動圧力とが導かれ、前記第2油圧ポンプが前記第2トルク制御部の制御の制限を受け、前記第2最大トルクで動作するときと、前記第2油圧ポンプが前記第2トルク制御部の制御の制限を受けず、前記ロードセンシング制御部が前記第2油圧ポンプの容量を制御するときのいずれの場合にも、前記第2油圧ポンプの吸収トルクを模擬するよう前記第2油圧ポンプの吐出圧を補正し、トルク制御圧力として出力するトルクフィードバック回路と、
前記トルク制御圧力が導かれ、前記トルク制御圧力が高くなるにしたがって前記第1油圧ポンプの容量を減少させ前記第1最大トルクが減少するよう前記第1油圧ポンプの容量を制御する第3トルク制御アクチュエータとを有し、
前記トルクフィードバック回路は、
前記第2油圧ポンプの吐出圧が導かれる固定絞りと、
この固定絞りの下流側に位置し、下流側がタンクに接続された可変絞り弁と、
前記固定絞りと前記可変絞り弁との間の油路に接続され、前記油路の圧力を前記第2トルク制御部の制御を開始する圧力以上にならないように制御する圧力制限弁とを有し、
前記可変絞り弁は、前記ロードセンシング駆動圧力が最低圧力にあるときは全閉し、前記ロードセンシング駆動圧力が高くなるにしたがって開口面積が大きくなるよう構成され、
前記トルクフィードバック回路は、前記固定絞りと前記可変絞り弁との間の油路の圧力に基づいて前記トルク制御圧力を生成し、このトルク制御圧力が前記第3トルク制御アクチュエータに導かれることを特徴とする建設機械の油圧駆動装置。 - 請求項1記載の建設機械の油圧駆動装置において、
前記トルクフィードバック回路は、前記第2油圧ポンプの吐出圧が一次圧として導かれる減圧弁を更に備え、
前記固定絞りと前記可変絞り弁との間の油路の圧力が前記減圧弁のセット圧を設定する目標制御圧力として前記減圧弁に導かれ、
前記減圧弁は、前記第2油圧ポンプの吐出圧が前記セット圧よりも低いときは、前記第2油圧ポンプの吐出圧をそのまま二次圧力として出力し、前記第2油圧ポンプの吐出圧が前記セット圧よりも高いときは、前記第2油圧ポンプの吐出圧を前記セット圧に減圧して出力し、前記減圧弁の出力圧が前記トルク制御圧力として前記第3トルク制御アクチュエータに導かれることを特徴とする建設機械の油圧駆動装置。 - 請求項1又は2記載の建設機械の油圧駆動装置において、
前記圧力制限弁はリリーフ弁であることを特徴とする建設機械の油圧駆動装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013246803A JP6021227B2 (ja) | 2013-11-28 | 2013-11-28 | 建設機械の油圧駆動装置 |
| EP14866109.3A EP3076027B1 (en) | 2013-11-28 | 2014-11-26 | Hydraulic drive device for construction machine |
| KR1020167004605A KR101736287B1 (ko) | 2013-11-28 | 2014-11-26 | 건설 기계의 유압 구동 장치 |
| PCT/JP2014/081146 WO2015080112A1 (ja) | 2013-11-28 | 2014-11-26 | 建設機械の油圧駆動装置 |
| CN201480046560.9A CN105473872B (zh) | 2013-11-28 | 2014-11-26 | 工程机械的液压驱动装置 |
| US15/027,016 US9976283B2 (en) | 2013-11-28 | 2014-11-26 | Hydraulic drive system for construction machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013246803A JP6021227B2 (ja) | 2013-11-28 | 2013-11-28 | 建設機械の油圧駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015105676A JP2015105676A (ja) | 2015-06-08 |
| JP2015105676A5 JP2015105676A5 (ja) | 2016-03-10 |
| JP6021227B2 true JP6021227B2 (ja) | 2016-11-09 |
Family
ID=53199052
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013246803A Active JP6021227B2 (ja) | 2013-11-28 | 2013-11-28 | 建設機械の油圧駆動装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9976283B2 (ja) |
| EP (1) | EP3076027B1 (ja) |
| JP (1) | JP6021227B2 (ja) |
| KR (1) | KR101736287B1 (ja) |
| CN (1) | CN105473872B (ja) |
| WO (1) | WO2015080112A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5750454B2 (ja) * | 2011-01-06 | 2015-07-22 | 日立建機株式会社 | 履帯式走行装置を備えた作業機の油圧駆動装置 |
| JP6194259B2 (ja) * | 2014-01-31 | 2017-09-06 | Kyb株式会社 | 作業機の制御システム |
| JP6510396B2 (ja) * | 2015-12-28 | 2019-05-08 | 日立建機株式会社 | 作業機械 |
| CN107158693A (zh) * | 2017-07-13 | 2017-09-15 | 谷子赫 | 六自由度游戏模拟器 |
| EP3495668B1 (en) * | 2017-09-08 | 2022-03-23 | Hitachi Construction Machinery Co., Ltd. | Hydraulic drive device |
| CN109707688B (zh) * | 2018-12-29 | 2020-08-18 | 中国煤炭科工集团太原研究院有限公司 | 一种具有前置压力补偿器的流量抗饱负载敏感多路阀 |
| WO2021192287A1 (ja) * | 2020-03-27 | 2021-09-30 | 株式会社日立建機ティエラ | 建設機械の油圧駆動装置 |
| JP7471901B2 (ja) * | 2020-04-28 | 2024-04-22 | ナブテスコ株式会社 | 流体圧駆動装置 |
| US11680381B2 (en) | 2021-01-07 | 2023-06-20 | Caterpillar Underground Mining Pty. Ltd. | Variable system pressure based on implement position |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58101277A (ja) | 1981-12-10 | 1983-06-16 | Kawasaki Heavy Ind Ltd | 可変容量ポンプの制御装置 |
| JPS59194105A (ja) * | 1983-04-20 | 1984-11-02 | Daikin Ind Ltd | 二流量合流回路 |
| DE3638889A1 (de) * | 1986-11-14 | 1988-05-26 | Hydromatik Gmbh | Summen-leistungsregelvorrichtung fuer wenigstens zwei hydrostatische getriebe |
| JPH07189916A (ja) | 1993-12-28 | 1995-07-28 | Kayaba Ind Co Ltd | 2連可変ポンプの制御機構 |
| JP3497646B2 (ja) * | 1996-02-02 | 2004-02-16 | 日立建機株式会社 | 建設機械の油圧駆動装置 |
| DE19904616A1 (de) * | 1999-02-05 | 2000-08-10 | Mannesmann Rexroth Ag | Steueranordnung für wenigstens zwei hydraulische Verbraucher und Druckdifferenzventil dafür |
| JP3865590B2 (ja) | 2001-02-19 | 2007-01-10 | 日立建機株式会社 | 建設機械の油圧回路 |
| JP2003247504A (ja) * | 2002-02-27 | 2003-09-05 | Hitachi Constr Mach Co Ltd | 作業機械の油圧制御装置 |
| SE527405C2 (sv) * | 2004-07-26 | 2006-02-28 | Volvo Constr Equip Holding Se | Arrangemang och förfarande för styrning av ett arbetsfordon |
| JP2006161509A (ja) * | 2004-12-10 | 2006-06-22 | Kubota Corp | 全旋回型バックホウの油圧回路構造 |
| JP2007024103A (ja) * | 2005-07-13 | 2007-02-01 | Hitachi Constr Mach Co Ltd | 油圧駆動装置 |
| JP4871781B2 (ja) * | 2007-04-25 | 2012-02-08 | 日立建機株式会社 | 建設機械の3ポンプ油圧回路システム及び油圧ショベルの3ポンプ油圧回路システム |
| US8511080B2 (en) | 2008-12-23 | 2013-08-20 | Caterpillar Inc. | Hydraulic control system having flow force compensation |
| JP5369030B2 (ja) | 2010-03-18 | 2013-12-18 | ヤンマー株式会社 | 作業車両の油圧回路 |
| JP5750454B2 (ja) * | 2011-01-06 | 2015-07-22 | 日立建機株式会社 | 履帯式走行装置を備えた作業機の油圧駆動装置 |
| KR20140063622A (ko) * | 2011-08-31 | 2014-05-27 | 히다찌 겐끼 가부시키가이샤 | 건설 기계의 유압 구동 장치 |
-
2013
- 2013-11-28 JP JP2013246803A patent/JP6021227B2/ja active Active
-
2014
- 2014-11-26 EP EP14866109.3A patent/EP3076027B1/en active Active
- 2014-11-26 WO PCT/JP2014/081146 patent/WO2015080112A1/ja active Application Filing
- 2014-11-26 US US15/027,016 patent/US9976283B2/en active Active
- 2014-11-26 CN CN201480046560.9A patent/CN105473872B/zh active Active
- 2014-11-26 KR KR1020167004605A patent/KR101736287B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| EP3076027A4 (en) | 2017-08-02 |
| KR101736287B1 (ko) | 2017-05-16 |
| JP2015105676A (ja) | 2015-06-08 |
| EP3076027A1 (en) | 2016-10-05 |
| WO2015080112A1 (ja) | 2015-06-04 |
| US9976283B2 (en) | 2018-05-22 |
| KR20160033774A (ko) | 2016-03-28 |
| CN105473872B (zh) | 2017-08-11 |
| EP3076027B1 (en) | 2019-04-10 |
| CN105473872A (zh) | 2016-04-06 |
| US20160258133A1 (en) | 2016-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6021227B2 (ja) | 建設機械の油圧駆動装置 | |
| JP5952405B2 (ja) | 建設機械の油圧駆動装置 | |
| KR101770674B1 (ko) | 건설기계의 유압 구동 장치 | |
| JP6021226B2 (ja) | 建設機械の油圧駆動装置 | |
| JPWO2014148449A1 (ja) | 建設機械の油圧駆動装置 | |
| JPWO2014192458A1 (ja) | 建設機械の油圧駆動装置 | |
| JP6730798B2 (ja) | 油圧駆動装置 | |
| WO2015141073A1 (ja) | 建設機械の油圧駆動装置 | |
| US20180238025A1 (en) | Work Machine | |
| JP2016061387A5 (ja) | ||
| WO2015025818A1 (ja) | 作業機械の油圧制御装置 | |
| JP5603115B2 (ja) | 作業車両の油圧回路 | |
| JP6525898B2 (ja) | 建設機械の油圧駆動装置 | |
| JP2011196436A (ja) | 作業車両の油圧回路 | |
| JP6082690B2 (ja) | 建設機械の油圧駆動装置 | |
| JP2015110981A5 (ja) | ||
| JP2012162917A (ja) | 油圧ショベルの油圧回路 | |
| JP2012112466A (ja) | 建設機械の油圧システム | |
| JP5406087B2 (ja) | 作業車両の油圧回路 | |
| JP6676824B2 (ja) | 作業機械の油圧駆動装置 | |
| JP5639855B2 (ja) | 油圧駆動装置および油圧駆動装置を備えた作業機械 | |
| JP2019065569A (ja) | 建設機械の油圧駆動装置 | |
| JP2008224039A (ja) | 油圧駆動機械の制御装置 | |
| JP7201878B2 (ja) | 建設機械の油圧駆動装置 | |
| JP4012495B2 (ja) | 油圧駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160120 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20160120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160913 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6021227 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |