JP5976027B2 - センサ軸ずれ検出装置およびセンサ軸ずれ検出方法 - Google Patents
センサ軸ずれ検出装置およびセンサ軸ずれ検出方法 Download PDFInfo
- Publication number
- JP5976027B2 JP5976027B2 JP2014065484A JP2014065484A JP5976027B2 JP 5976027 B2 JP5976027 B2 JP 5976027B2 JP 2014065484 A JP2014065484 A JP 2014065484A JP 2014065484 A JP2014065484 A JP 2014065484A JP 5976027 B2 JP5976027 B2 JP 5976027B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- detection
- detection target
- sensor information
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 353
- 238000000034 method Methods 0.000 description 18
- 230000004927 fusion Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 1
Images





Landscapes
- Measurement Of Optical Distance (AREA)
- Radar Systems Or Details Thereof (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
特許文献1、2に記載の従来技術においては、複数のセンサ間の軸ずれを検出する際には、複数のセンサのすべてが同一の物体を検出することが前提である。しかしながら、複数のセンサのそれぞれの検出特性(検出領域(覆域))が異なるので、これらすべてのセンサが同一の物体を検出できるとは限らない。
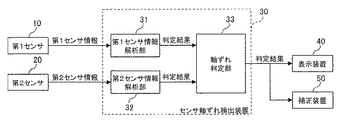
図1は、本発明の実施の形態1におけるセンサ軸ずれ検出装置30の構成を示すブロック図である。また、この図1におけるセンサ軸ずれ検出装置30には、第1センサ10と、第2センサ20と、表示装置40と、補正装置50とが接続されている。
本発明の実施の形態2では、先の実施の形態1と異なり、副覆域の存在を考慮する場合について説明する。なお、本実施の形態2における検出装置30としては、先の実施の形態1における検出装置30と比べて、構成は同様であるが、動作が異なる。したがって、ここでは、先の実施の形態1における検出装置30とは異なる動作を中心に説明する。
本発明の実施の形態3では、先の実施の形態2と異なり、第2センサ20の設定副覆域22bの一部が第1センサ10の検出領域11の外側にあることを考慮する場合について説明する。なお、本実施の形態3における検出装置30としては、先の実施の形態1、2における検出装置30と比べて、構成は同様であるが、動作が異なる。したがって、ここでは、先の実施の形態1、2における検出装置30とは異なる動作を中心に説明する。
Claims (3)
- 第1検出領域に存在する物体の位置に関する情報を第1センサ情報として検出する第1センサと、第2検出領域に存在する物体の位置に関する情報を第2センサ情報として検出する第2センサとの間の軸ずれを検出するセンサ軸ずれ検出装置であって、
前記第1センサおよび前記第2センサは、同一の物体を検出対象とし、
前記第1センサの座標軸と第2センサの座標軸とが一致しないときの、前記第1センサの座標軸に対する前記第2センサの座標軸のずれを前記軸ずれとして検出し、
前記第1センサから取得した前記第1センサ情報に基づいて、前記検出対象が前記第1検出領域に存在するか否かを判定するとともに、前記第1センサと前記第2センサとの間で前記軸ずれが発生していないと仮定した時の前記第2検出領域に対応する領域であり、あらかじめ設定されている前記第2センサの設定覆域に前記検出対象が存在するか否かを判定する第1センサ情報解析部と、
前記第2センサから取得した前記第2センサ情報に基づいて、前記検出対象が前記第2検出領域に存在するか否かを判定する第2センサ情報解析部と、
前記第1センサ情報解析部による判定結果および前記第2センサ情報解析部による判定結果にしたがって、前記第1センサと前記第2センサとの間での軸ずれの有無を判定する軸ずれ判定部と、
を備え、
前記軸ずれ判定部は、
前記第1センサ情報解析部により前記検出対象が前記第1検出領域に存在すると判定された場合において、前記第1センサ情報解析部により前記第2センサの設定覆域に前記検出対象が存在すると判定され、かつ、前記第2センサ情報解析部により前記検出対象が前記第2検出領域に存在しないと判定された場合、
または
前記第1センサ情報解析部により前記検出対象が前記第1検出領域に存在すると判定された場合において、前記第1センサ情報解析部により前記第2センサの設定覆域に前記検出対象が存在しないと判定され、かつ、前記第2センサ情報解析部により前記検出対象が前記第2検出領域に存在すると判定された場合、
前記軸ずれが有りと判定し、
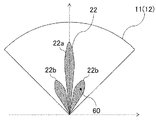
前記第1センサ情報解析部には、前記第2センサの設定覆域として前記第2センサのメインローブに当たる設定主覆域および前記第2センサのサイドローブに当たる設定副覆域に分けられてあらかじめ設定され、
前記第1センサ情報解析部は、
前記第1センサから取得した前記第1センサ情報に基づいて、あらかじめ設定されている前記第2センサの前記設定主覆域に前記検出対象が存在するか否かをさらに判定し、
前記軸ずれ判定部は、
前記第1センサ情報解析部により前記検出対象が前記第1検出領域に存在すると判定された場合において、
前記第1センサ情報解析部により前記第2センサの設定覆域に前記検出対象が存在すると判定され、前記第2センサ情報解析部により前記検出対象が前記第2検出領域に存在すると判定され、かつ、前記第1センサ情報解析部により前記第2センサの前記設定主覆域に前記検出対象が存在しないと判定された場合、
前記第2センサの前記設定副覆域で、前記検出対象を検出したと判定し、
前記第2センサの前記設定覆域の少なくとも一部は、前記第1検出領域に包含され、
前記第2センサの前記設定主覆域の少なくとも一部は、前記第1検出領域に包含される センサ軸ずれ検出装置。 - 請求項1に記載のセンサ軸ずれ検出装置において、
前記軸ずれ判定部は、
前記第1センサ情報解析部により前記検出対象が前記第1検出領域に存在しないと判定され、かつ、前記第2センサ情報解析部により前記検出対象が前記第2検出領域に存在すると判定された場合、
前記第2センサのみで前記検出対象を検出したと判定する
センサ軸ずれ検出装置。 - 第1検出領域に存在する物体の位置に関する情報を第1センサ情報として検出する第1センサと、第2検出領域に存在する物体の位置に関する情報を第2センサ情報として検出する第2センサとの間の軸ずれを検出するセンサ軸ずれ検出装置で実行されるセンサ軸ずれ検出方法であって、
前記第1センサの座標軸と第2センサの座標軸とが一致しないときの、前記第1センサの座標軸に対する前記第2センサの座標軸のずれを前記軸ずれとして検出し、
前記第1センサおよび前記第2センサは、同一の物体を検出対象とし、
前記第1センサから取得した前記第1センサ情報に基づいて、前記検出対象が前記第1検出領域に存在するか否かを判定するとともに、前記第1センサと前記第2センサとの間で前記軸ずれが発生していないと仮定した時の前記第2検出領域に対応する領域であり、あらかじめ設定されている前記第2センサの設定覆域に前記検出対象が存在するか否かを判定する第1センサ情報解析ステップと、
前記第2センサから取得した前記第2センサ情報に基づいて、前記検出対象が前記第2検出領域に存在するか否かを判定する第2センサ情報解析ステップと、
前記第1センサ情報解析ステップでの判定結果および前記第2センサ情報解析ステップでの判定結果にしたがって、前記第1センサと前記第2センサとの間での軸ずれの有無を判定する軸ずれ判定ステップと、
を備え、
前記軸ずれ判定ステップで、
前記第1センサ情報解析ステップで前記検出対象が前記第1検出領域に存在すると判定された場合において、前記第1センサ情報解析ステップで前記第2センサの設定覆域に前記検出対象が存在すると判定され、かつ、前記第2センサ情報解析ステップで前記検出対象が前記第2検出領域に存在しないと判定された場合、
または
前記第1センサ情報解析ステップで前記検出対象が前記第1検出領域に存在すると判定された場合において、前記第1センサ情報解析ステップで、前記第2センサの設定覆域に前記検出対象が存在しないと判定され、かつ、前記第2センサ情報解析ステップで、前記検出対象が前記第2検出領域に存在すると判定された場合、
前記軸ずれが有りと判定し、
前記第1センサ情報解析ステップでは、前記第2センサの設定覆域として前記第2センサのメインローブに当たる設定主覆域および前記第2センサのサイドローブに当たる設定副覆域に分けられてあらかじめ設定され、
前記第1センサ情報解析ステップでは、
前記第1センサから取得した前記第1センサ情報に基づいて、あらかじめ設定されている前記第2センサの前記設定主覆域に前記検出対象が存在するか否かをさらに判定し、
前記軸ずれ判定ステップでは、
前記第1センサ情報解析ステップにおいて前記検出対象が前記第1検出領域に存在すると判定された場合において、
前記第1センサ情報解析ステップにおいて前記第2センサの設定覆域に前記検出対象が存在すると判定され、前記第2センサ情報解析ステップにおいて前記検出対象が前記第2検出領域に存在すると判定され、かつ、前記第1センサ情報解析ステップにおいて前記第2センサの前記設定主覆域に前記検出対象が存在しないと判定された場合、
前記第2センサの前記設定副覆域で、前記検出対象を検出したと判定し、
前記第2センサの前記設定覆域の少なくとも一部は、前記第1検出領域に包含され、
前記第2センサの前記設定主覆域の少なくとも一部は、前記第1検出領域に包含される センサ軸ずれ検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014065484A JP5976027B2 (ja) | 2014-03-27 | 2014-03-27 | センサ軸ずれ検出装置およびセンサ軸ずれ検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014065484A JP5976027B2 (ja) | 2014-03-27 | 2014-03-27 | センサ軸ずれ検出装置およびセンサ軸ずれ検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015187589A JP2015187589A (ja) | 2015-10-29 |
| JP5976027B2 true JP5976027B2 (ja) | 2016-08-23 |
Family
ID=54429888
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014065484A Active JP5976027B2 (ja) | 2014-03-27 | 2014-03-27 | センサ軸ずれ検出装置およびセンサ軸ずれ検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5976027B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3667359A1 (de) * | 2018-12-11 | 2020-06-17 | Volkswagen AG | Verfahren zur ermittlung einer vorliegenden dejustage wenigstens eines sensors innerhalb eines sensorverbundes |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6514828B2 (ja) * | 2016-08-12 | 2019-05-15 | 株式会社小糸製作所 | 照明システムおよびセンサシステム |
| JP6848725B2 (ja) * | 2017-06-29 | 2021-03-24 | 株式会社デンソー | 車両用の対象物検出装置および車両用の対象物検出装置における水平方向の軸ずれ判定方法 |
| JP6637472B2 (ja) * | 2017-07-06 | 2020-01-29 | 本田技研工業株式会社 | 情報処理方法及び情報処理装置 |
| RU2742323C2 (ru) * | 2018-12-29 | 2021-02-04 | Общество с ограниченной ответственностью "Яндекс Беспилотные Технологии" | Способ и компьютерное устройство для определения углового смещения радиолокационной системы |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09142236A (ja) * | 1995-11-17 | 1997-06-03 | Mitsubishi Electric Corp | 車両の周辺監視方法と周辺監視装置及び周辺監視装置の故障判定方法と周辺監視装置の故障判定装置 |
| JP3331882B2 (ja) * | 1995-12-27 | 2002-10-07 | 株式会社デンソー | 車両用障害物検出装置の中心軸偏向量算出装置,中心軸偏向量補正装置,および車間制御装置 |
| JPH09218265A (ja) * | 1996-02-14 | 1997-08-19 | Nissan Motor Co Ltd | レーダ中心軸自動補正装置 |
| JP2000028715A (ja) * | 1998-07-14 | 2000-01-28 | Nippon Signal Co Ltd:The | 複合形レーダセンサ |
| DE19962997B4 (de) * | 1999-12-24 | 2010-06-02 | Robert Bosch Gmbh | Verfahren zur Kalibrierung eines Sensorsystems |
| JP2005114542A (ja) * | 2003-10-08 | 2005-04-28 | Hitachi Ltd | 障害物検知装置及びそれを用いた障害物警報装置 |
| JP2006011570A (ja) * | 2004-06-23 | 2006-01-12 | Daihatsu Motor Co Ltd | カメラキャリブレーション方法及びカメラキャリブレーション装置 |
| JP5146716B2 (ja) * | 2007-03-01 | 2013-02-20 | マツダ株式会社 | 車両用障害物検知装置 |
| JP2010249613A (ja) * | 2009-04-14 | 2010-11-04 | Toyota Motor Corp | 障害物認識装置及び車両制御装置 |
| JP2011043387A (ja) * | 2009-08-20 | 2011-03-03 | Toyota Motor Corp | 車載レーダシステム |
-
2014
- 2014-03-27 JP JP2014065484A patent/JP5976027B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3667359A1 (de) * | 2018-12-11 | 2020-06-17 | Volkswagen AG | Verfahren zur ermittlung einer vorliegenden dejustage wenigstens eines sensors innerhalb eines sensorverbundes |
| US11604245B2 (en) | 2018-12-11 | 2023-03-14 | Volkswagen Aktiengesellschaft | Method for establishing the presence of a misalignment of at least one sensor within a sensor group |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015187589A (ja) | 2015-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5976027B2 (ja) | センサ軸ずれ検出装置およびセンサ軸ずれ検出方法 | |
| JP6643166B2 (ja) | 物体認識装置及び物体認識方法 | |
| US10126410B2 (en) | Determination of an elevation misalignment angle of a radar sensor of a motor vehicle | |
| JP5835243B2 (ja) | 物標認識装置 | |
| JP5316572B2 (ja) | 物体認識装置 | |
| JP2014153211A (ja) | 周辺監視システム及び周辺監視システムの軸ずれ検知方法 | |
| JPWO2018079297A1 (ja) | 故障検知装置 | |
| KR20160056129A (ko) | 주변차량의 위치정보 보정 시스템 및 방법 | |
| KR101473736B1 (ko) | 폐루프 기반의 다중 센서 캘리브레이션 장치 및 그 방법 | |
| KR101915363B1 (ko) | Gps 음영 지역에서 차량을 측위하는 장치 및 그 방법 | |
| JP2004037239A (ja) | 同一対象物判断方法および装置、並びに、位置ずれ補正方法および装置 | |
| JP2014137288A (ja) | 車両周辺監視装置および車両周辺監視方法 | |
| KR20210061875A (ko) | 포인트 클라우드 데이터를 이용한 3d lidar 센서 결함 검출 방법 | |
| WO2016031918A1 (ja) | 軸ずれ診断装置 | |
| KR20200052751A (ko) | 차량용 측위 장치 및 그의 측위 방법과 그를 포함하는 차량 | |
| JP6075377B2 (ja) | 通信装置、通信システム、通信方法およびプログラム | |
| US11333790B2 (en) | Method of setting a plurality of part regions of a desired protected zone | |
| CN103728615A (zh) | 相控阵二次雷达多目标检测方法及系统 | |
| US20120032924A1 (en) | Touch screen apparatus | |
| US20160137157A1 (en) | Object recognition device | |
| US20180172475A1 (en) | Drive Device with Detection Apparatus and Method | |
| US20230260395A1 (en) | Correction data generation device, correction data generation method and computer readable medium | |
| US11709269B2 (en) | Method, processing unit and surveying instrument for improved tracking of a target | |
| US10469823B2 (en) | Image apparatus for detecting abnormality of distance image | |
| US11039114B2 (en) | Method for determining distance information from images of a spatial region |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150915 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20150930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160621 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160719 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5976027 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |