JP5963353B2 - 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム - Google Patents
光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム Download PDFInfo
- Publication number
- JP5963353B2 JP5963353B2 JP2012177504A JP2012177504A JP5963353B2 JP 5963353 B2 JP5963353 B2 JP 5963353B2 JP 2012177504 A JP2012177504 A JP 2012177504A JP 2012177504 A JP2012177504 A JP 2012177504A JP 5963353 B2 JP5963353 B2 JP 5963353B2
- Authority
- JP
- Japan
- Prior art keywords
- dimensional
- edges
- group
- dimensional model
- edge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—3D [Three Dimensional] image rendering
- G06T15/10—Geometric effects
- G06T15/20—Perspective computation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/05—Geographic models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/10—Constructive solid geometry [CSG] using solid primitives, e.g. cylinders, cubes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformation in the plane of the image
- G06T3/40—Scaling the whole image or part thereof
- G06T3/403—Edge-driven scaling
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/56—Particle system, point based geometry or rendering
Description
(前提)
本実施形態における測定対象物は、主要な対象が建築物であるとする。
(用語の定義)
以下、明細書中で用いる用語について説明する。
(ラベル)
ラベルとは面を特定する(あるいは他の面と区別する)識別子である。面は、演算の対象として選択するのに適切な面のことであり、平面、曲率の大きい曲面、曲率が大きくその位置による変化が小さい曲面が含まれる。本明細書では、演算により数学的に把握(データ化)する際の演算量が許容される量であるか否かによって、面と非面とが区別される。非面には、角、エッジ部分、その他曲率の小さい部分や曲率の場所による変化が激しい部分が含まれる。これらの部分は、演算による数学的な把握(データ化)に際して、多量の演算が必要であり、演算装置への高負担や演算時間の増大を招く。本明細書では、演算時間の短縮が重要であるので、このような演算装置への高負担や演算時間の増大を招く面を非面として除去し、極力演算の対象としないようにする。
三次元エッジ(エッジ)というのは、測定対象物の外観を視覚的に把握するために必要な、当該測定対象物の外形を形作っている輪郭線(outline)や点のことである。具体的には、折れ曲がった部分や急激に曲率が小さくなっている部分が三次元エッジとなる。三次元エッジは、外側の輪郭の部分のみが対象となるとは限らず、凸状に飛び出している部分を特徴付ける縁の部分や、凹状に引っ込んでいる部分(例えば、溝構造の部分)を特徴づける縁の部分も対象となる。三次元エッジにより所謂線図により構成される三次元モデルが構成される。この三次元モデルにより、測定対象物の外観が把握し易い画像表示を行うことができる。
三次元モデルは、上述した三次元エッジにより構成される線図である。三次元モデルにより、測定対象物の外観が視覚的に把握し易い画像が得られる。三次元モデルの画像(三次元モデル図)は、例えばCAD図面等に利用することができる。
点群位置データでは、二次元画像と三次元座標とが結び付けられている。すなわち、点群位置データでは、測定対象物の二次元画像のデータと、この二次元画像に対応付けされた複数の測定点と、この複数の測定点の三次元空間中の位置(三次元座標)とが関連付けされている。点群位置データによれば、点の集合により測定対象物の立体的な外形を再現することができる。すなわち、各点の三次元座標が判るので、各点の相対位置関係が把握でき、画面表示した対象物の画像を回転させたり、異なる視点から見た画像に切り替えたりする処理が可能となる。
図1には、実施形態における処理の流れの概要が示されている。図1のフローチャートを実行するためのプログラムは、図2の光学データ処理装置100が備える適当なメモリ領域に格納され、光学データ処理装置100が備えるCPUによって実行される。なお、図1のフローチャートを実行するためのプログラムを外部の適当な記憶媒体に格納し、そこから光学データ処理装置100に提供される形態も可能である。この点は、明細書中で説明する数々の処理を実行するプログラムにおいても同じである。
以下、図1の処理を実行する光学データ処理装置の一例を説明する。図2には、光学データ処理装置100が示されている。光学データ処理装置100は、パーソナルコンピュータ内においてソフトウェア的に構成されている。すなわち、本発明を利用した処理を行う専用のソフトウェアがインストールされたパーソナルコンピュータが図1の光学データ処理装置100として機能する。このプログラムは、パーソナルコンピュータ中にインストールされている状態に限定されず、サーバや適当な記録媒体に記録しておき、そこから提供される形態であってもよい。
Logic Device)等を用いて構成した専用のハードウェアによって光学データ処理装置100の一部または全部を構成することも可能である。
図2の三次元モデル作成部420の詳細、およびその動作(図1のステップS200)の詳細について説明する。図3には、三次元モデル作成部420のブロック図が示されている。三次元モデル形成部420は、局所領域を取得する局所領域取得部421、局所領域の法線ベクトルを算出する法線ベクトル算出部422、局所領域の局所曲率を算出する局所曲率算出部423、局所領域にフィッティングする局所平面を算出する局所平面算出部424、非面領域除去部425、面ラベリング部426、輪郭線算出部427、二次元エッジ算出部428、エッジ統合部429を備えている。
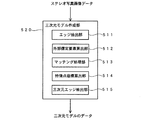
写真画像データ処理部500の三次元モデル作成部520の詳細、およびその動作(図1のステップS400)について説明する。以下において、1台のカメラを用い、位置を変えての撮影を行なうことで、左写真画像と右写真画像を得る場合の例を説明する。勿論、左右2台のカメラを用意して、左写真画像と右写真画像を同時に撮影する構成も可能である。
エッジ抽出部511は、左写真画像および右写真画像のそれぞれから測定対象物のエッジを抽出する。ここで、左写真画像および右写真画像は平面画像であるので、抽出の対象となるエッジは、画像中の測定対象物を構成する2次元の輪郭線の部分となる。エッジ抽出部511におけるエッジの抽出は、以下のようにして行われる。まず、Sobelフィルタを用い、エッジ強度の向きを用いたNMS(非最大値抑制)で細線化したのち、エッジ強度により閾値処理を行う。ここで、x軸方向の強度の微分をfx、y軸方向の強度の微分をfyとすると、数2のよりエッジ強度Iが表される。

外部標定要素算出部511は、ステレオ写真画像に基づき、相互標定法を用いて外部標定要素の算出を自動的に行なう。つまり、左右の写真画像の対応関係を演算により求め、その結果を用いて、相互標定法により左右の写真画像の撮影時におけるカメラの向きと位置(撮影対象物に対する相対的なカメラの向きと位置)の算出を行う。相互標定法は、既知点がなくとも相対的な外部標定要素が求められる方法である。処理の流れとしては、まず、左写真画像と右写真画像とにおける対応する特徴点を求める。そして、左右の写真画像で対応する特徴点から標定用の対応点を求め、この標定用の対応点を用いた相互標定法により左写真画像と右写真画像の外部標定要素を求める。
(1)未知パラメータ(κ1,φ1,κ2,φ2,ω2)の初期近似値は通常0とする。
(2)数8の共面条件式を近似値のまわりにテーラー展開し、線形化したときの微分係数の値を数9により求め、観測方程式をたてる。
(3)最小二乗法をあてはめ、近似値に対する補正量を求める。
(4)近似値を補正する。
(5)補正された近似値を用いて、(1)〜(4)までの操作を収束するまで繰り返す。
上述した外部標定要素の算出では、左右の写真画像において、標定用の対応点が求められているが、標定用の対応点では、密度が小さく三次元モデルの作成はできない。そこで、図4のマッチング処理部513は、左右の写真画像に基づく三次元モデルの作成を行うために、外部標定要素算出部512が算出した外部標定を用いて、左右の写真画像の特徴点の対応関係を特定する。
Dn:各パスポイントの視差
Ln:着目する特徴点から各パスポイントまでの距離
Ls:着目する特徴点から各パスポイントまでの距離の合計
図4の三次元エッジ抽出部515について説明する。三次元エッジ抽出部515は、左右の写真画像において、既に求められている特徴点間の対応関係、およびその三次元座標に基づいて、三次元空間中における三次元エッジを抽出する。すなわち、マッチング処理部513によって、左右の写真画像中におけるエッジ(二次元エッジ)の端点の対応関係が特定され、特徴点座標算出部514によってその三次元座標の値が求められている。よって、三次元空間中における三次元エッジの端点の三次元座標は特定でき、三次元エッジを特定することができる。この処理が三次元エッジ抽出部515において行われる。この三次元エッジは、測定対象物の三次元構造を構成する線分であり、この三次元エッジにより三次元モデルが構成される。こうして、測定対象物を異なる2つの視点から撮影したステレオ写真画像に基づいて、三次元エッジが抽出され、測定対象物の三次元モデルのデータが作成される。
図2の法線ベクトル抽出部600において行なわれる図1のステップS500の詳細な一例を説明する。法線ベクトル抽出部600は、三次元モデル作成部420が作成した三次元モデル(レーザー点群三次元モデル)、および三次元モデル作成部520が作成した三次元モデル(画像計測三次元モデル)を対象に、マンハッタンワールド仮説に基づく法線ベクトルの抽出を行う。この処理では、まず、「人工構造物には互いに直交する支配的な3軸が存在し、建造物を構成する面は、それらと垂直または平行に配置している」というマンハッタンワールド仮説に基づき、レーザー点群三次元モデルおよび画像計測三次元モデルから、その三次元方向の向きを決める3方向の法線ベクトルを抽出する。
三次元モデル向き調整部700は、法線ベクトル抽出部600が抽出した法線ベクトルに基づき、レーザー点群三次元モデルと画像計測三次元モデルの向きを合わせる処理を行う。ここで、3方向の法線ベクトルは、垂直方向(鉛直方向)の法線ベクトル、垂直方向に直交する水平2軸の法線ベクトルである。三次元モデル向き調整部700は、2群の法線ベクトルの向きが概略一致するように、一方または両方の三次元モデルを回転させる。こうして、レーザー点群三次元モデルと画像計測三次元モデルの凡その向きを合わせる処理が行われる。なお、この状態においては、画像計測三次元モデルは実スケールを持っていない相対モデルであり、また特定の方向に縮小または拡大しているので、向きが合ったとはいえ、2つの三次元モデルは整合しない。
図2に示す三次元エッジ位置合わせ部800は、一方の三次元モデルにおける垂直方向における複数の三次元エッジ間の距離と角度を用いて、同様な位置関係を持つ他方の三次元モデルにおける垂直方向の三次元エッジの組み合わせを探索する。図12に示すように、図2に示す三次元エッジ位置合わせ部800は、垂直エッジ抽出部801、垂直エッジの相対位置特定用パラメータ取得部802、類似度算出部803、対応垂直エッジ算出部804、画像計測三次元モデル縮尺調整部805を備えている。
図2の三次元モデル統合部900について説明する。三次元モデル統合部900は、三次元エッジ位置合わせ部800において探察された垂直エッジの対応関係に基づいて、画像計測三次元モデルとレーザー点群三次元モデルとを統合した統合三次元モデルの作成を行う。この統合された三次元モデルでは、レーザー点群三次元モデルにおいてオクルージョンとなっている部分が画像計測三次元モデルによって補完された状態となる。
以上述べたように、本実施形態では、点群位置データから得られた三次元モデルとステレオ写真画像から得られた三次元モデルを統合する処理において、対象物が建築物であるという仮定に基づき、垂直エッジの対応関係を求める。この際、垂直エッジを他の垂直エッジとの間の相対位置関係によって特徴付け、この相対位置関係を比較することで、両三次元モデル間における垂直エッジの対応関係の探索を行う。
図13に示す処理では、垂直エッジを対象としているが、他の方向のエッジを対象として図13に示す処理を行うこともできる。特定方向のエッジの抽出は、上述したマンハッタンワールド仮説を用いる手法以外の方法を用いても良い。例えば、(1)エッジの抽出、(2)抽出したエッジを3軸方向のそれぞれに分類、(3)分類されたエッジの中から顕著性のある特定方向のエッジの抽出、といった手法により、特定方向のエッジの抽出を行うこともできる。以下、この処理の一例を説明する、まず、左右の写真画像のそれぞれにおいて、エッジの抽出を行う。次に、同じ方向に延在したエッジを集め、その総延長距離を計算する。次に、総延長距離の長い順に、3番目までを選び、1番目のエッジ群を主エッジとして分類し、2番目と3番目のエッジを主エッジに直交する2軸のエッジとする。例えば、高層建築物が対象であれば、主エッジが垂直エッジとして選択され,水平方向に延在した低層階の建築物であれば、水平方向の一軸が主エッジの延在方向として選択される。
第1の実施形態においては、主となる三次元モデルがレーザー点群三次元モデルであり、レーザー点群三次元モデルでオクルージョンとなる部分を補うために画像計測三次元モデルを用いる場合の例を説明した。これとは逆に、画像計測三次元モデルを主とし、それを補う形でレーザー点群三次元モデルを用いることも可能である。この場合、処理の手順は、第1の実施形態の場合と同じである。異なるのは、画像計測三次元モデルがより広い範囲を対象とし、その一部(オクルージョンとなる部分や精度に欠ける部分等を含む領域)をレーザー点群三次元モデルで補う点である。
Vehicle:UAV)等を用いて行われる航空写真測量により得られた三次元モデルを主とし、そこでオクルージョンとなる部分や精度が低い部分を地上で行われるレーザースキャニングにより得られたレーザー点群三次元モデルで補う場合が挙げられる。なお、レーザー点群三次元モデルと画像計測三次元モデルの何れが主な三次元モデルで、何れが補助的な三次元モデルであるのかが明確でない場合も有りうる。また、いずれの三次元モデルもオクルージョンを含み、それが他方の三次元モデルで互いに補われるような場合も有りうる。
統合する2つの三次元モデルの両方をレーザー点群三次元モデルとすることも可能である。この場合、異なる視点のそれぞれからレーザースキャニングが行われ、第1のレーザー点群三次元モデルと、第2のレーザー点群三次元モデルを得、この2つの三次元モデルを第1の実施形態で示した手順により統合する。ここで、2つの三次元モデルは、点群位置の座標値が判っている絶対モデルであるので、図1のステップS700で行われる位置合わせは、アフィン変換ではなく、剛体変換(若干の向きの補正を含む)あるいは平行移動を一方または両方の三次元モデルに対して行うことで行われる。したがって、この例の場合、図12の符合805の部分は、三次元モデルの剛体変換処理部または平行移動処理部として機能する。
統合する2つの三次元モデルの両方を画像計測三次元モデルとすることも可能である。この場合、異なる視点のそれぞれからステレオ写真画像の取得が行われ、第1のステレオ写真画像に基づく第1の画像計測三次元モデルと、第2のステレオ写真画像に基づく第2の画像計測三次元モデルを得、この2つの三次元モデルを第1の実施形態で示した手順により統合する。ここで、2つの三次元モデルの両方が実スケールを持っていない相対モデルである第1の態様、一方が相対モデルであり他方が、座標値が判っている絶対モデルである第2の態様、両方が絶対モデルである第3の態様が可能である。
and Mapping)が用いられるが、この技術において、ある第1の位置で得たステレオ写真画像に基づいて取得した第1の画像計測三次元モデルと、第2の位置で得たステレオ写真画像に基づいて取得した第2の画像計測三次元モデルとの対応関係を求める処理が必要とされる場合がある。そのような場合に本発明の第1の三次元モデルと第2の三次元モデルとの対応関係を求める技術を利用することができる。
Claims (14)
- 第1の三次元モデルから特定の方向に延在した複数の三次元エッジを第1群三次元エッジとして抽出すると共に第2の三次元モデルから前記特定の方向と同じ方向に延在した複数の三次元エッジを第2群三次元エッジとして抽出する抽出部と、
前記第1群三次元エッジのそれぞれと前記第2群三次元エッジのそれぞれとの類似度を算出する類似度算出部と、
前記類似度に基づき、前記第1群三次元エッジの一つに対応する前記第2群三次元エッジの一つを選択する選択部と
を備えることを特徴とする光学データ処理装置。 - 前記第1群三次元エッジのそれぞれにおける他の複数の三次元エッジに対する相対位置および前記第2群三次元エッジのそれぞれにおける他の複数の三次元エッジに対する相対位置を特定する特定部を備え、
前記類似度算出部は、前記相対位置の類似度を算出することを特徴とする請求項1に記載の光学データ処理装置。 - 前記相対位置は、特定の三次元エッジと他の複数の三次元エッジとを結ぶ複数のベクトルの組み合わせによって表されることを特徴とする請求項2に記載の光学データ処理装置。
- 前記類似度が前記複数のベクトルの長さと予め決められた第1の方向に対する角度とにより評価されることを特徴とする請求項3に記載の光学データ処理装置。
- 前記特定の方向が垂直方向であることを特徴とする請求項1〜4のいずれか一項に記載の光学データ処理装置。
- 前記三次元エッジが当該三次元エッジを構成する線分の端点によって特定されていることを特徴とする請求項1〜5のいずれか一項に記載の光学データ処理装置。
- 前記第1の三次元モデルおよび前記第2の三次元モデルの少なくとも一方がステレオ写真画像に基づく三次元モデルであることを特徴とする請求項1〜6のいずれか一項に記載の光学データ処理装置。
- 前記ステレオ写真画像を構成する左写真画像および右写真画像における垂直方向のエッジに基づき、前記左写真画像および前記右写真画像の外部標定要素の算出を行う外部標定要素算出部を備えることを特徴とする請求項7に記載の光学データ処理装置。
- 前記ステレオ写真画像に基づく三次元モデルは伸びまたは縮んでおり、
前記選択部により選択された前記第1群三次元エッジのそれぞれと前記第2群三次元エッジのそれぞれとの位置が合うように、前記ステレオ写真画像に基づく三次元モデルの縮尺を調整する縮尺調整部と、
前記選択部により選択された前記第1群三次元エッジと前記第2群三次元エッジの組み合わせに基づき、前記縮尺が調整された前記ステレオ写真画像に基づく三次元モデルと他方の三次元モデルとを統合する三次元モデル統合部と
を備えることを特徴とする請求項8に記載の光学データ処理装置。 - 前記第1の三次元モデルがレーザー光の反射光から取得された三次元点群位置データに基づく三次元モデルであり、前記第2の三次元モデルがステレオ写真画像に基づく三次元モデルである第1の場合、前記第1の三次元モデルおよび前記第2の三次元モデルがステレオ写真画像に基づく三次元モデルである第2の場合のいずれかであることを特徴とする請求項1〜9のいずれか一項に記載の光学データ処理装置。
- 前記第1の三次元モデルおよび前記第2の三次元モデルがレーザー光の反射光から取得された三次元点群位置データに基づく三次元モデルであることを特徴とする請求項1〜6のいずれか一項に記載の光学データ処理装置。
- 第1の三次元モデルから特定の方向に延在した複数の三次元エッジを第1群三次元エッジとして抽出すると共に第2の三次元モデルから前記特定の方向と同じ方向に延在した複数の三次元エッジを第2群三次元エッジとして抽出する抽出手段と、
前記第1群三次元エッジのそれぞれと前記第2群三次元エッジのそれぞれとの類似度を算出する類似度算出手段と、
前記類似度に基づき、前記第1群三次元エッジの一つに対応する前記第2群三次元エッジの一つを選択する選択手段と
を備えることを特徴とする光学データ処理システム。 - 第1の三次元モデルから特定の方向に延在した複数の三次元エッジを第1群三次元エッジとして抽出すると共に第2の三次元モデルから前記特定の方向と同じ方向に延在した複数の三次元エッジを第2群三次元エッジとして抽出する抽出ステップと、
前記第1群三次元エッジのそれぞれと前記第2群三次元エッジのそれぞれとの類似度を算出する類似度算出ステップと、
前記類似度に基づき、前記第1群三次元エッジの一つに対応する前記第2群三次元エッジの一つを選択する選択ステップと
を備えることを特徴とする光学データ処理方法。 - コンピュータに読み取らせて実行させる光学データ処理用プログラムであって、
コンピュータを
第1の三次元モデルから特定の方向に延在した複数の三次元エッジを第1群三次元エッジとして抽出すると共に第2の三次元モデルから前記特定の方向と同じ方向に延在した複数の三次元エッジを第2群三次元エッジとして抽出する抽出手段と、
前記第1群三次元エッジのそれぞれと前記第2群三次元エッジのそれぞれとの類似度を算出する類似度算出手段と、
前記類似度に基づき、前記第1群三次元エッジの一つに対応する前記第2群三次元エッジの一つを選択する選択手段と
して動作させることを特徴とする光学データ処理用プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012177504A JP5963353B2 (ja) | 2012-08-09 | 2012-08-09 | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
| US14/420,401 US9977983B2 (en) | 2012-08-09 | 2013-06-20 | Optical data processing device, optical data processing system, optical data processing method, and optical data processing program |
| PCT/JP2013/066967 WO2014024579A1 (ja) | 2012-08-09 | 2013-06-20 | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012177504A JP5963353B2 (ja) | 2012-08-09 | 2012-08-09 | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014035702A JP2014035702A (ja) | 2014-02-24 |
| JP5963353B2 true JP5963353B2 (ja) | 2016-08-03 |
Family
ID=50067820
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012177504A Active JP5963353B2 (ja) | 2012-08-09 | 2012-08-09 | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9977983B2 (ja) |
| JP (1) | JP5963353B2 (ja) |
| WO (1) | WO2014024579A1 (ja) |
Families Citing this family (78)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120150573A1 (en) * | 2010-12-13 | 2012-06-14 | Omar Soubra | Real-time site monitoring design |
| EP2884364B1 (en) * | 2013-12-12 | 2018-09-26 | Hexagon Technology Center GmbH | Autonomous gardening vehicle with camera |
| EP3106968B1 (en) * | 2014-02-10 | 2019-09-25 | Sony Corporation | Information processing device, information processing method, and program |
| US20150269436A1 (en) * | 2014-03-18 | 2015-09-24 | Qualcomm Incorporated | Line segment tracking in computer vision applications |
| FR3022022B1 (fr) * | 2014-06-04 | 2019-08-09 | Quantificare | Dispositif pour l'acquisition d'une paire d'images en stereophotogrammetrie |
| EP3159125A4 (en) * | 2014-06-17 | 2018-05-23 | Yujin Robot Co., Ltd. | Device for recognizing position of mobile robot by using direct tracking, and method therefor |
| WO2015194864A1 (ko) * | 2014-06-17 | 2015-12-23 | (주)유진로봇 | 이동 로봇의 맵을 업데이트하기 위한 장치 및 그 방법 |
| WO2015194865A1 (ko) * | 2014-06-17 | 2015-12-23 | (주)유진로봇 | 검색 기반 상관 매칭을 이용하여 이동 로봇의 위치를 인식하기 위한 장치 및 그 방법 |
| WO2015194868A1 (ko) * | 2014-06-17 | 2015-12-23 | (주)유진로봇 | 광각 카메라가 탑재된 이동 로봇의 주행을 제어하기 위한 장치 및 그 방법 |
| JP6635649B2 (ja) * | 2014-09-26 | 2020-01-29 | 国立大学法人千葉大学 | データ重ね合わせプログラム及びデータ重ね合わせ方法 |
| US9846963B2 (en) * | 2014-10-03 | 2017-12-19 | Samsung Electronics Co., Ltd. | 3-dimensional model generation using edges |
| FR3028988B1 (fr) * | 2014-11-20 | 2018-01-19 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Procede et dispositif de filtrage adaptatif temps reel d'images de disparite ou de profondeur bruitees |
| JP6510247B2 (ja) | 2015-01-27 | 2019-05-08 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法およびプログラム |
| JP6534296B2 (ja) * | 2015-05-19 | 2019-06-26 | 株式会社パスコ | 3次元モデル生成装置、3次元モデル生成方法、及びプログラム |
| JP6543520B2 (ja) * | 2015-07-02 | 2019-07-10 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| JP6685704B2 (ja) * | 2015-11-27 | 2020-04-22 | 株式会社東芝 | 車種判別装置および車種判別方法 |
| US9842278B2 (en) * | 2015-11-29 | 2017-12-12 | Tend Insights, Inc. | Image analysis and orientation correction for target object detection and validation |
| US20170214943A1 (en) * | 2016-01-22 | 2017-07-27 | Mitsubishi Electric Research Laboratories, Inc. | Point Cloud Compression using Prediction and Shape-Adaptive Transforms |
| CN105651209B (zh) * | 2016-02-05 | 2018-10-02 | 中测新图(北京)遥感技术有限责任公司 | 指定区域面积的应急获取方法和装置 |
| KR102040156B1 (ko) * | 2016-03-02 | 2019-11-05 | 한국전자통신연구원 | 3차원 건물 데이터 편집장치 및 그 방법 |
| ITUA20163231A1 (it) * | 2016-05-09 | 2016-08-09 | Uesse Srl | Processo e sistema per analizzare deformazioni in autoveicoli |
| JP6430073B2 (ja) | 2016-06-02 | 2018-11-28 | 三菱電機株式会社 | 姿勢推定装置、姿勢推定方法及び観測システム |
| JP6750967B2 (ja) * | 2016-06-09 | 2020-09-02 | 株式会社東芝 | 車種判別装置および車種判別方法 |
| EP3258211B1 (en) * | 2016-06-17 | 2023-12-13 | Hexagon Technology Center GmbH | Determining object reflection properties with respect to particular optical measurement |
| WO2017222558A1 (en) * | 2016-06-24 | 2017-12-28 | Isee, Inc. | Laser-enhanced visual simultaneous localization and mapping (slam) for mobile devices |
| JP6868992B2 (ja) * | 2016-09-27 | 2021-05-12 | 株式会社トプコン | 画像処理装置、画像処理方法および画像処理用プログラム |
| JP6773503B2 (ja) * | 2016-09-27 | 2020-10-21 | 株式会社トプコン | レーザスキャナシステム及び点群データのレジストレーション方法 |
| JP6604934B2 (ja) * | 2016-12-13 | 2019-11-13 | 日本電信電話株式会社 | 点群画素位置決定装置、方法、及びプログラム |
| EP3361235A1 (en) * | 2017-02-10 | 2018-08-15 | VoxelGrid GmbH | Device and method for analysing objects |
| JP6880822B2 (ja) * | 2017-02-24 | 2021-06-02 | 株式会社リコー | 装置、移動体装置及び方法 |
| WO2018176290A1 (en) | 2017-03-29 | 2018-10-04 | SZ DJI Technology Co., Ltd. | Light detection and ranging (lidar) signal processing circuitry |
| WO2018176291A1 (en) | 2017-03-29 | 2018-10-04 | SZ DJI Technology Co., Ltd. | Hollow motor apparatuses and associated systems and methods |
| JP2020508457A (ja) | 2017-03-29 | 2020-03-19 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | センサーシステム及びその方法 |
| JP6717425B2 (ja) * | 2017-04-03 | 2020-07-01 | 富士通株式会社 | 距離情報処理装置、距離情報処理方法および距離情報処理プログラム |
| WO2018195999A1 (en) * | 2017-04-28 | 2018-11-01 | SZ DJI Technology Co., Ltd. | Calibration of laser and vision sensors |
| EP3616159A4 (en) | 2017-04-28 | 2020-05-13 | SZ DJI Technology Co., Ltd. | CALIBRATION OF LASER SENSORS |
| CN110573928B (zh) | 2017-04-28 | 2021-10-08 | 深圳市大疆创新科技有限公司 | 光检测和测距系统中的角校准 |
| JP6835665B2 (ja) * | 2017-05-25 | 2021-02-24 | Kddi株式会社 | 情報処理装置及びプログラム |
| JP6854195B2 (ja) | 2017-06-09 | 2021-04-07 | 株式会社トプコン | 画像処理装置、画像処理方法および画像処理用プログラム |
| EP3455645A4 (en) | 2017-07-20 | 2019-04-24 | SZ DJI Technology Co., Ltd. | SYSTEMS AND METHOD FOR OPTICAL SPACING MEASUREMENT |
| JP6928499B2 (ja) * | 2017-07-21 | 2021-09-01 | 株式会社タダノ | ガイド情報表示装置および作業機 |
| EP3631508A4 (en) | 2017-07-31 | 2020-06-24 | SZ DJI Technology Co., Ltd. | MOTION-BASED PRECISION CORRECTION IN POINT CLOUDS |
| EP3472645A4 (en) | 2017-08-31 | 2019-07-17 | SZ DJI Technology Co., Ltd. | DELAY TIME CALIBRATION OF OPTICAL DISTANCE MEASURING DEVICES AND RELATED SYSTEMS AND METHOD |
| JP7109891B2 (ja) * | 2017-09-01 | 2022-08-01 | 成典 田中 | 対応点導出方法および対応点算出装置 |
| JP7037302B2 (ja) | 2017-09-06 | 2022-03-16 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| JP6878219B2 (ja) * | 2017-09-08 | 2021-05-26 | 株式会社東芝 | 画像処理装置および測距装置 |
| JP7025156B2 (ja) | 2017-09-19 | 2022-02-24 | 株式会社トプコン | データ処理装置、データ処理方法およびデータ処理用プログラム |
| US10684372B2 (en) * | 2017-10-03 | 2020-06-16 | Uatc, Llc | Systems, devices, and methods for autonomous vehicle localization |
| CN108010116B (zh) * | 2017-11-30 | 2021-02-09 | 西南科技大学 | 点云特征点检测方法和点云特征提取方法 |
| JP7043283B2 (ja) | 2018-02-14 | 2022-03-29 | 株式会社トプコン | 無人航空機の設置台、測量方法、測量装置、測量システムおよびプログラム |
| US11127203B2 (en) * | 2018-05-16 | 2021-09-21 | Samsung Electronics Co., Ltd. | Leveraging crowdsourced data for localization and mapping within an environment |
| JP7093680B2 (ja) * | 2018-06-01 | 2022-06-30 | 日立Geニュークリア・エナジー株式会社 | 構造物差分抽出装置、構造物差分抽出方法およびプログラム |
| US10810734B2 (en) * | 2018-07-02 | 2020-10-20 | Sri International | Computer aided rebar measurement and inspection system |
| US10877155B2 (en) | 2018-09-25 | 2020-12-29 | Topcon Corporation | Survey data processing device, survey data processing method, and survey data processing program |
| TWI677413B (zh) * | 2018-11-20 | 2019-11-21 | 財團法人工業技術研究院 | 用於機械手臂系統之校正方法及裝置 |
| CN111383179B (zh) * | 2018-12-28 | 2023-02-14 | 技嘉科技股份有限公司 | 镜头影像校正方法 |
| US11790326B2 (en) * | 2019-01-04 | 2023-10-17 | Robert Lee Watts | Systems and methods for repair of vehicle body damage |
| US11069085B2 (en) | 2019-02-13 | 2021-07-20 | Toyota Research Institute, Inc. | Locating a vehicle based on labeling point cloud data of a scene |
| US10949707B2 (en) * | 2019-02-27 | 2021-03-16 | Here Global B.V. | Method, apparatus, and system for generating feature correspondence from camera geometry |
| JP7275668B2 (ja) * | 2019-03-07 | 2023-05-18 | 株式会社リコー | 測距装置及び測距方法 |
| CN110009726B (zh) * | 2019-03-08 | 2022-09-30 | 浙江中海达空间信息技术有限公司 | 一种根据平面基元间的结构关系对点云提取平面的方法 |
| JP7242431B2 (ja) | 2019-05-31 | 2023-03-20 | 公益財団法人かずさDna研究所 | 三次元計測装置、三次元計測方法および三次元計測用プログラム |
| US11288814B2 (en) * | 2019-07-15 | 2022-03-29 | Mujin, Inc. | System and method of object detection based on image data |
| JP7300915B2 (ja) | 2019-07-16 | 2023-06-30 | 株式会社トプコン | 測量装置 |
| JP7313955B2 (ja) | 2019-07-30 | 2023-07-25 | 株式会社トプコン | 測量装置、測量方法および測量用プログラム |
| JP7300930B2 (ja) | 2019-08-26 | 2023-06-30 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| US11398070B1 (en) * | 2020-01-22 | 2022-07-26 | Amazon Technologies, Inc. | Boundary approximation utilizing radar |
| CN111311667B (zh) * | 2020-02-14 | 2022-05-17 | 苏州浪潮智能科技有限公司 | 一种内容自适应双目匹配方法和装置 |
| US11403764B2 (en) | 2020-02-14 | 2022-08-02 | Mujin, Inc. | Method and computing system for processing candidate edges |
| JP7369653B2 (ja) * | 2020-03-26 | 2023-10-26 | 株式会社タダノ | ガイド表示システムおよびこれを備えたクレーン |
| CN111583302B (zh) * | 2020-05-06 | 2021-07-16 | 北京大学 | 一种基于三维激光点云的割煤顶板线提取方法 |
| JP6863634B6 (ja) * | 2020-05-27 | 2021-06-02 | シンメトリー・ディメンションズ・インク | モデル生成装置、学習器生成装置、モデル生成方法、及び、学習器生成方法 |
| JP2022023592A (ja) | 2020-07-27 | 2022-02-08 | 株式会社トプコン | 測量システム、測量方法および測量用プログラム |
| US11548156B2 (en) * | 2020-09-17 | 2023-01-10 | Techman Robot Inc. | Device and method for calibrating coordinate system of 3D camera and robotic arm |
| JPWO2022102236A1 (ja) * | 2020-11-16 | 2022-05-19 | ||
| CN112923852B (zh) * | 2021-01-29 | 2021-11-12 | 江南大学 | 基于动态角点定位的sd卡位姿检测方法 |
| CN117280247A (zh) * | 2021-05-11 | 2023-12-22 | 富士胶片株式会社 | 信息处理装置、信息处理方法及程序 |
| CN116129365B (zh) * | 2023-04-18 | 2023-08-15 | 天津美腾科技股份有限公司 | 输送设备上颗粒物料的检测方法和系统 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06168341A (ja) * | 1992-12-01 | 1994-06-14 | Canon Inc | 3次元形状モデル処理方法及びその装置 |
| JP2920513B2 (ja) * | 1997-01-21 | 1999-07-19 | 工業技術院長 | 3次元物体位置姿勢決定方法 |
| JP5057734B2 (ja) | 2006-09-25 | 2012-10-24 | 株式会社トプコン | 測量方法及び測量システム及び測量データ処理プログラム |
| JP5343042B2 (ja) | 2010-06-25 | 2013-11-13 | 株式会社トプコン | 点群データ処理装置および点群データ処理プログラム |
| JP5620200B2 (ja) * | 2010-09-06 | 2014-11-05 | 株式会社トプコン | 点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム |
| JP5129844B2 (ja) * | 2010-09-07 | 2013-01-30 | 株式会社日本製鋼所 | ボルトテンショナおよびボルトテンショナ調整装置 |
| JP5593177B2 (ja) * | 2010-09-14 | 2014-09-17 | 株式会社トプコン | 点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム |
| JP5580164B2 (ja) | 2010-10-18 | 2014-08-27 | 株式会社トプコン | 光学情報処理装置、光学情報処理方法、光学情報処理システム、光学情報処理プログラム |
-
2012
- 2012-08-09 JP JP2012177504A patent/JP5963353B2/ja active Active
-
2013
- 2013-06-20 WO PCT/JP2013/066967 patent/WO2014024579A1/ja active Application Filing
- 2013-06-20 US US14/420,401 patent/US9977983B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9977983B2 (en) | 2018-05-22 |
| JP2014035702A (ja) | 2014-02-24 |
| US20150206023A1 (en) | 2015-07-23 |
| WO2014024579A1 (ja) | 2014-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5963353B2 (ja) | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム | |
| JP5713159B2 (ja) | ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム | |
| US8447099B2 (en) | Forming 3D models using two images | |
| US8452081B2 (en) | Forming 3D models using multiple images | |
| JP6807639B2 (ja) | 奥行きカメラを校正する方法 | |
| JP5955028B2 (ja) | 画像処理装置、画像処理方法および画像処理用のプログラム | |
| Golparvar-Fard et al. | Evaluation of image-based modeling and laser scanning accuracy for emerging automated performance monitoring techniques | |
| JP6426968B2 (ja) | 情報処理装置およびその方法 | |
| EP2874118B1 (en) | Computing camera parameters | |
| JP5593177B2 (ja) | 点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム | |
| US10977857B2 (en) | Apparatus and method of three-dimensional reverse modeling of building structure by using photographic images | |
| CN108648194B (zh) | 基于cad模型三维目标识别分割和位姿测量方法及装置 | |
| JP2005308553A (ja) | 三次元画像計測装置及び方法 | |
| Lei et al. | A CNN-based 3D patch registration approach for integrating sequential models in support of progress monitoring | |
| JP2011085971A (ja) | 画像処理装置、画像処理方法、画像処理プログラム、記録媒体及び画像処理システム | |
| JP6172432B2 (ja) | 被写体識別装置、被写体識別方法および被写体識別プログラム | |
| Kuschk | Large scale urban reconstruction from remote sensing imagery | |
| TWI599987B (zh) | 點雲拼接系統及方法 | |
| US10672181B2 (en) | 3D capture: object extraction | |
| JP2019211981A (ja) | 情報処理装置、情報処理装置の制御方法およびプログラム | |
| Cupec et al. | Fast 2.5 D Mesh Segmentation to Approximately Convex Surfaces. | |
| JP6156922B2 (ja) | 三次元データ生成装置、三次元データ生成方法、及びプログラム | |
| Arslan | 3D object reconstruction from a single image | |
| Kim et al. | Mesh modelling of 3D point cloud from UAV images by point classification and geometric constraints | |
| CN113034673A (zh) | 一种3d点云建模系统及计算机可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160627 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5963353 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |