JP6543520B2 - 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム - Google Patents
測量データ処理装置、測量データ処理方法および測量データ処理用プログラム Download PDFInfo
- Publication number
- JP6543520B2 JP6543520B2 JP2015133736A JP2015133736A JP6543520B2 JP 6543520 B2 JP6543520 B2 JP 6543520B2 JP 2015133736 A JP2015133736 A JP 2015133736A JP 2015133736 A JP2015133736 A JP 2015133736A JP 6543520 B2 JP6543520 B2 JP 6543520B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- reference point
- model
- shape model
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 64
- 238000003672 processing method Methods 0.000 title claims description 3
- 238000000034 method Methods 0.000 claims description 149
- 238000001514 detection method Methods 0.000 claims description 36
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 claims description 31
- 230000008569 process Effects 0.000 description 88
- 238000004364 calculation method Methods 0.000 description 16
- 238000005259 measurement Methods 0.000 description 15
- 238000005516 engineering process Methods 0.000 description 8
- 230000009466 transformation Effects 0.000 description 7
- 238000000605 extraction Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 230000005484 gravity Effects 0.000 description 5
- 238000012876 topography Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 230000001788 irregular Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 239000000284 extract Substances 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000010191 image analysis Methods 0.000 description 2
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000005314 correlation function Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000011158 quantitative evaluation Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/04—Interpretation of pictures
- G01C11/06—Interpretation of pictures by comparison of two or more pictures of the same area
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/05—Geographic models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
- G06V20/13—Satellite images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10032—Satellite or aerial image; Remote sensing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Astronomy & Astrophysics (AREA)
- Radar, Positioning & Navigation (AREA)
- Computer Graphics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
(概要)
本実施形態では、例えば土木工事現場等を上空から写真撮影し、その際に得られた画像データに基づき対象となる地形の三次元モデル(電子データとしてモデル化された三次元地形データ)を作成する。
図11には、実施形態の測量データ処理装置100のブロック図が示されている。測量データ処理装置100は、CPU、電子メモリやハードディスク装置により構成される記憶装置、各種のインタ−フェース回路、その他必要とする演算回路を備えたコンピュータである。測量データ処理装置100は、以下に述べる機能部を有している。これら機能部の一または複数は、ソフトウェア的に構成されていてもよいし、専用のハードウェアで構成されていてもよい。例えば、図示する各機能部は、CPU(Central Processing Unit)、ASIC(Application Specific Integrated Circuit)、FPGA(Field Programmable Gate Array)などのPLD(Programmable Logic Device)などの電子回路により構成される。また、演算速度や記憶容量の問題をクリアできるのであれば、市販のコンピュータを用いて測量データ処理装置100の一部または全部を構成することもできる。
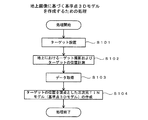
図2には、地上側で行われる処理の手順の一例が示されている。ここでは、土木工事現場の三次元モデルを作成する場合を説明する。なお、図2におけるステップS104で行われる処理を実行するためのプログラムは、適当な記憶媒体や記憶領域に記憶されており、図1に示すハードウェアによって実行される。
(1)全てのターゲットの位置の計測をTSおよび/または高精度GNSS装置を用いて行う。
(2)一部のターゲットの位置の計測をTSおよび/または高精度GNSS装置を用いて行い、他のターゲットの位置の計測は、スマートフォン等のGNSS機能を用いて行う。
以下、図2の処理で得た基準点3Dモデルと比較される相対3Dモデルを得るための処理の一例を説明する。図4には、相対3Dモデルを得るための処理の一例が示されている。なお、図4におけるステップS203〜S208で行われる処理を実行するためのプログラムは、適当な記憶媒体や記憶領域に記憶されており、図1に示すハードウェアによって実行される。

ここでは、図2の処理で得た基準点3Dモデルと図4の処理で得た相対3Dモデルとの対応関係を求め、相対3Dモデルにおける基準点(ターゲットの設置位置)の位置を取得する処理について説明する。この処理では、基準点3Dモデルと相対3Dモデルの点の配置に関する類似性を定量的に評価する。そしてこの定量評価の結果を利用して基準点3DモデルのTINを構成する点と相対3DモデルのTINを構成する点との対応関係を求める。
図5の処理を行うことで、相対3Dモデルにおけるターゲットの位置(地図座標系上における位置)が特定され、更に移動体画像中での基準点の位置(ターゲットの位置)の特定が行なわれる。ここでは、更に以下の処理を行うことで、移動体画像中で検出が確実に行われなかった基準点(ターゲット)の位置を精度よく特定できる処理の一例を説明する。図5の処理によって、相対3Dモデルにおけるターゲットの位置が特定可能となる。ここでは、図5の処理の結果を利用して画像マッチングを行い、移動体画像中からのターゲット位置の検出を行う。
以上述べたように、本実施形態では、地上に設置された複数の基準点のそれぞれを撮影することで得た第1の画像(上記の例では地上画像)のデータおよび前記複数の基準点の三次元位置のデータを含む第1のデータと、移動する移動体の一例であるUAVから前記複数の基準点を含む領域を撮影することで得た第2の画像(上記の例では移動体画像)のデータを含む第2のデータとを受け付けるデータ受付ステップ(ステップS103,S202)と、前記第1のデータに含まれる前記複数の基準点の三次元位置それぞれを頂点とする第1の形状モデル(上記の例では基準点3Dモデル)を作成する第1の形状モデル作成ステップ(ステップS104)と、前記第2の画像から前記基準点の画像を検出する基準点検出ステップ(ステップS203)と、前記第2の画像から検出された前記基準点のそれぞれを頂点とする第2の形状モデル(上記の例では相対3Dモデル)を作成する第2の形状モデル作成ステップ(ステップS208)と、前記第1の形状モデルと前記第2の形状モデルとの対応関係を求める第1の対応関係特定ステップ(図5の処理)と、前記第1の形状モデルと前記第2の形状モデルとの対応関係から前記第2の画像における前記基準点の推定位置を取得する基準点推定位置取得ステップ(ステップS312)と、前記基準点の前記推定位置に基づいて、前記第1の画像と前記第2の画像との対応関係を求める第2の対応関係特定ステップ(ステップS403)と、前記第1の画像と前記第2の画像との前記対応関係に基づき、前記第2の画像における前記基準点の三次元位置を特定する三次元位置特定ステップ(ステップS404)を行う。
ステップS304における類似判定指標の算出では、TINを構成する三角形を対象としたが、着目した特定の点から他の点への4以上の線分に関して数2〜数4の算出を行ってもよい。この場合、着目した点と周囲の点との相対位置関係が定量的に評価され、当該着目点が特徴づけられる。すなわち、類似判定指標として着目点と4点以上の他の点との関係を定量的に評価するパラメータが得られる。着目点と他の点との関係の多様性が多くなる程、当該着目点を特徴づけるパラメータの顕著性、すなわち当該着目点を他の点から定量的に差別化できるようになるので、基準点3Dモデルと相対3Dモデルとのマッチング精度を更に高めることができる。
基準点3Dモデルと相対3Dモデルとの対応を求める方法の他の例を説明する。以下の処理は、図5の処理の代わりに、あるいは図5の処理に併用して利用できる。
この例では、ある角度から見た基準点3Dモデルを構成する全点の平均値を重心とし、図12の場合と同様なヒストグラムを作成する。他方で、ある角度から見た相対3Dモデルを構成する全点の平均値を重心とし、図12の場合と同様なヒストグラムを作成する。そして、得られた2つのヒストグラムを角度軸方向でずらしながら、両者の対応関係を探索する。この際の処理の詳細は、第3の実施形態の場合と同じである。対応関係がとれた段階で相対3Dモデルを構成する点に対応する基準点3Dモデルの点の位置情報を取得し、相対3Dモデルを構成する点の三次元位置情報を取得する。
規準点3Dモデルを構成する各点(基準点)と相対3Dモデルを構成する各点との対応関係を求める手法として、RANSAC(Random sample consensus)やLMEDS(Least Median Squares)を用いることもできる。例えば、以下の手法を用いて、2つのモデルの対応関係を求める。
例えば、未知変量+1として、アフィン変換であれば7点以上、射影変換であれば9点以上、ヘルマート変換(平行移動と回転)であれば5点以上の点をランダムに選択する。
(2)点同士の組み合わせをランダムに選択し、その際の変換係数を求める。
(3)最も多かった(近かった)変換係数を順位別に並べる。
(4)順位の高いものから変換を施す。
(5)変換した後、各点での残差を求める。
(6)最も残差が少なかったものを候補とする。
(7)基準点の隣接関係から妥当性があるかをチェックする。
(8)もしだめなら、次に順位の高いものを変換して残差を求める。
(9)これを繰り返して、(7)に一番あったものを選び対応点とする。
(10)マッチングにより詳細マッチングを行う。
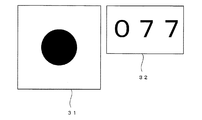
移動体は、航空機に限定されず、車両や船舶であってよい。例えば、車両にカメラを搭載し、移動する車両から撮影を行って移動体画像を得ることもできる。上記の説明では、ターゲットに近接して配置された識別プレート32の識別番号を利用する処理について記載していないが、移動体画像中のターゲットの位置が特定された後で、その付近の拡大画像を得、そこから識別プレート32の識別番号を画像認識によって読み取り、対応するターゲット31の座標情報を取得してもよい。この場合、画像探索の範囲が極めて狭い範囲に絞られるので、識別プレート32の識別番号の画像検出は容易に行える。
Claims (11)
- 地上に設置された複数の基準点のそれぞれを撮影することで得た第1の画像のデータおよび前記複数の基準点の三次元位置のデータを含む第1のデータと、移動体から前記複数の基準点を含む領域を撮影することで得た第2の画像のデータを含む第2のデータとを受け付けるデータ受付部と、
前記第1のデータに含まれる前記複数の基準点の三次元位置それぞれを頂点とする第1の形状モデルを作成する第1の形状モデル作成部と、
前記第2の画像から前記基準点の画像を検出する基準点検出部と、
前記第2の画像から検出された前記基準点のそれぞれを頂点とする第2の形状モデルを作成する第2の形状モデル作成部と、
前記第1の形状モデルと前記第2の形状モデルとの対応関係を求める第1の対応関係特定部と、
前記第1の形状モデルと前記第2の形状モデルとの対応関係から前記第2の画像における前記基準点の三次元位置を取得する基準点位置取得部と
を備えることを特徴とする測量データ処理装置。 - 前記第2の形状モデルは、異なる視点から得られた複数の第2の画像に基づく交会法により作成された三次元モデルであることを特徴とする請求項1に記載の測量データ処理装置。
- 前記基準点位置取得部が取得した前記基準点の三次元位置に基づいて、前記第1の画像と前記第2の画像との対応関係を求める第2の対応関係特定部と、
前記第1の画像と前記第2の画像との前記対応関係に基づき、前記第2の画像における前記基準点の三次元位置を特定する三次元位置特定部と
を備えることを特徴とする請求項1または2に記載の測量データ処理装置。 - 前記第2の画像は、航空機から撮影された広域画像であり、
前記第1の画像は、前記基準点を至近距離から撮影した画像であり、
前記第2の対応関係特定部は、前記第1の画像と前記基準点の特定位置に基づき前記第2の画像の一部を拡大した拡大画像との対応関係の特定を行うことを特徴とする請求項3に記載の測量データ処理装置。 - 前記第1の画像と前記拡大画像との対応関係を求めた上で、前記第1の画像に写った前記基準点の前記三次元位置を前記第2の画像上で特定することを特徴とする請求項4に記載の測量データ処理装置。
- 前記第1の画像と前記拡大画像の対応関係の特定に前記基準点の画像以外の画像情報が利用されることを特徴とする請求項4または5に記載の測量データ処理装置。
- 前記第1のデータには、前記第2の画像上からは検出されなかった前記基準点の三次元位置のデータが含まれ、
前記第2の画像上からは検出されなかった前記基準点の三次元位置が前記三次元位置特定部によって特定されることを特徴とする請求項3〜6のいずれか一項に記載の測量データ処理装置。 - 前記第1の形状モデルは、前記第1のデータに含まれる前記複数の基準点の前記三次元位置を頂点とする第1の三次元TINモデルであり、
前記第2の形状モデルは、視点の異なる複数の前記第2の画像に基づき交会法を用いて作成された3次元モデルに前記第2の画像中における前記基準点の位置を対応させることで作成された第2の三次元TINモデルであることを特徴とする請求項1〜7のいずれか一項に記載の測量データ処理装置。 - 前記第1の対応関係特定部は、前記第1の三次元TINモデルを構成する三角形と前記第2の三次元TINモデルを構成する三角形との類似性に基づいて、前記第1の形状モデルと前記第2の形状モデルとの対応関係を求めることを特徴とする請求項8に記載の測量データ処理装置。
- 地上に設置された複数の基準点のそれぞれを撮影することで得た第1の画像のデータおよび前記複数の基準点の三次元位置のデータを含む第1のデータと、移動する移動体から前記複数の基準点を含む領域を撮影することで得た第2の画像のデータを含む第2のデータとを受け付けるデータ受付ステップと、
前記第1のデータに含まれる前記複数の基準点の三次元位置それぞれを頂点とする第1の形状モデルを作成する第1の形状モデル作成ステップと、
前記第2の画像から前記基準点の画像を検出する基準点検出ステップと、
前記第2の画像から検出された前記基準点のそれぞれを頂点とする第2の形状モデルを作成する第2の形状モデル作成ステップと、
前記第1の形状モデルと前記第2の形状モデルとの対応関係を求める第1の対応関係特定ステップと、
前記第1の形状モデルと前記第2の形状モデルとの対応関係から前記第2の画像における前記基準点の三次元位置を取得する基準点位置取得ステップと
を備えることを特徴とする測量データ処理方法。 - コンピュータに読みとらせて実行させるプログラムであって、
コンピュータに
地上に設置された複数の基準点のそれぞれを撮影することで得た第1の画像のデータおよび前記複数の基準点の三次元位置のデータを含む第1のデータと、移動する移動体から前記複数の基準点を含む領域を撮影することで得た第2の画像のデータを含む第2のデータとを受け付けるデータ受付ステップと、
前記第1のデータに含まれる前記複数の基準点の三次元位置それぞれを頂点とする第1の形状モデルを作成する第1の形状モデル作成ステップと、
前記第2の画像から前記基準点の画像を検出する基準点検出ステップと、
前記第2の画像から検出された前記基準点のそれぞれを頂点とする第2の形状モデルを作成する第2の形状モデル作成ステップと、
前記第1の形状モデルと前記第2の形状モデルとの対応関係を求める第1の対応関係特定ステップと、
前記第1の形状モデルと前記第2の形状モデルとの対応関係から前記第2の画像における前記基準点の三次元位置を取得する基準点位置取得ステップと
を実行させることを特徴とする測量データ処理用プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015133736A JP6543520B2 (ja) | 2015-07-02 | 2015-07-02 | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| US15/196,425 US10198632B2 (en) | 2015-07-02 | 2016-06-29 | Survey data processing device, survey data processing method, and survey data processing program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015133736A JP6543520B2 (ja) | 2015-07-02 | 2015-07-02 | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017015598A JP2017015598A (ja) | 2017-01-19 |
| JP2017015598A5 JP2017015598A5 (ja) | 2018-08-09 |
| JP6543520B2 true JP6543520B2 (ja) | 2019-07-10 |
Family
ID=57683111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015133736A Active JP6543520B2 (ja) | 2015-07-02 | 2015-07-02 | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10198632B2 (ja) |
| JP (1) | JP6543520B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102242366B1 (ko) * | 2020-10-29 | 2021-04-21 | 한국건설기술연구원 | 토공현장의 디지털맵 생성을 위한 드론 기반 지상기준점 배치 자동화 장치 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9903719B2 (en) * | 2013-09-03 | 2018-02-27 | Litel Instruments | System and method for advanced navigation |
| JP6767279B2 (ja) * | 2017-02-09 | 2020-10-14 | 株式会社トプコン | 測量システム |
| CN106774422A (zh) * | 2017-02-28 | 2017-05-31 | 成都紫瑞青云航空宇航技术有限公司 | 一种无人机识别方法及系统 |
| US10431103B2 (en) | 2017-04-11 | 2019-10-01 | T-Mobile Usa, Inc. | Three-dimensional network coverage modeling for UAVs |
| CN107607091A (zh) * | 2017-08-31 | 2018-01-19 | 中国电力科学研究院 | 一种测量无人机飞行航迹的方法 |
| US10733470B2 (en) * | 2018-01-25 | 2020-08-04 | Geomni, Inc. | Systems and methods for rapid alignment of digital imagery datasets to models of structures |
| JP7048347B2 (ja) * | 2018-02-23 | 2022-04-05 | 成典 田中 | 位置関係決定装置 |
| US11248930B2 (en) * | 2018-03-02 | 2022-02-15 | International Business Machines Corporation | Microclimate wind forecasting |
| KR102144268B1 (ko) * | 2018-07-02 | 2020-08-28 | 주식회사 유니디자인경영연구소 | 무인 관측 수단에 의해 촬영된 영상을 이용한 브이알(VR, Virtual Reality)용 쓰리디 맵 제작 장치 및 방법 |
| GB201812170D0 (en) * | 2018-07-26 | 2018-09-12 | Scape Tech Ltd | Method of model alignment through localisation usage |
| JP7301514B2 (ja) * | 2018-09-21 | 2023-07-03 | 日立建機株式会社 | 座標変換システム及び作業機械 |
| CN109255341B (zh) * | 2018-10-30 | 2021-08-10 | 百度在线网络技术(北京)有限公司 | 障碍物感知错误数据的提取方法、装置、设备及介质 |
| CN111436208B (zh) * | 2018-11-21 | 2023-10-03 | 广州极飞科技股份有限公司 | 一种测绘采样点的规划方法、装置、控制终端及存储介质 |
| US12085389B2 (en) * | 2019-06-18 | 2024-09-10 | Nippon Telegraph And Telephone Corporation | Absolute coordinate acquisition method |
| CN114286923A (zh) * | 2019-06-26 | 2022-04-05 | 谷歌有限责任公司 | 由数据集对应关系定义的全球坐标系 |
| CN111699453A (zh) * | 2019-07-01 | 2020-09-22 | 深圳市大疆创新科技有限公司 | 可移动平台的控制方法、装置、设备及存储介质 |
| JP7300915B2 (ja) | 2019-07-16 | 2023-06-30 | 株式会社トプコン | 測量装置 |
| JP7300930B2 (ja) | 2019-08-26 | 2023-06-30 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| US11531833B2 (en) * | 2020-01-16 | 2022-12-20 | Honeywell International Inc. | Creating a ground control point file using an existing landmark shown in images |
| WO2021221758A2 (en) | 2020-02-13 | 2021-11-04 | Skydio, Inc. | Performing 3d reconstruction via an unmanned aerial vehicle |
| CN111343082A (zh) * | 2020-03-06 | 2020-06-26 | 梁冠岚 | 微型机器人集群立体显示方法 |
| CN113075714B (zh) * | 2020-11-13 | 2021-12-21 | 中移(上海)信息通信科技有限公司 | 一种基于参考点位置的辅助定位方法、装置及设备 |
| CN117940739A (zh) * | 2021-10-28 | 2024-04-26 | 深圳市大疆创新科技有限公司 | 可移动平台的定位方法和装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3441139B2 (ja) * | 1993-12-27 | 2003-08-25 | 三井住友建設株式会社 | 写真測量方法及び該方法に用いる標定点指示装置 |
| JP4077385B2 (ja) * | 2003-09-19 | 2008-04-16 | コマツエンジニアリング株式会社 | 画像処理を用いたグローバル座標取得装置 |
| FI117490B (fi) * | 2004-03-15 | 2006-10-31 | Geodeettinen Laitos | Menetelmä puustotunnusten määrittämiseksi laserkeilaimen, kuvainformaation ja yksittäisten puiden tulkinnan avulla |
| JP5356269B2 (ja) * | 2010-01-29 | 2013-12-04 | 株式会社パスコ | レーザデータのフィルタリング方法及び装置 |
| JP2013096745A (ja) | 2011-10-28 | 2013-05-20 | Hokuriku Kosoku Co Ltd | 三次元モデルの作成方法 |
| JP5963353B2 (ja) * | 2012-08-09 | 2016-08-03 | 株式会社トプコン | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
-
2015
- 2015-07-02 JP JP2015133736A patent/JP6543520B2/ja active Active
-
2016
- 2016-06-29 US US15/196,425 patent/US10198632B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102242366B1 (ko) * | 2020-10-29 | 2021-04-21 | 한국건설기술연구원 | 토공현장의 디지털맵 생성을 위한 드론 기반 지상기준점 배치 자동화 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10198632B2 (en) | 2019-02-05 |
| US20170004345A1 (en) | 2017-01-05 |
| JP2017015598A (ja) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6543520B2 (ja) | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム | |
| JP6510247B2 (ja) | 測量データ処理装置、測量データ処理方法およびプログラム | |
| KR101933216B1 (ko) | 드론과 공간정보를 이용한 하천지형정보 생성 방법 | |
| US8571265B2 (en) | Measurement apparatus, measurement method, and feature identification apparatus | |
| EP3023913A1 (en) | Crack data collection method and crack data collection program | |
| EP2660777A2 (en) | Image registration of multimodal data using 3D geoarcs | |
| US20090154793A1 (en) | Digital photogrammetric method and apparatus using intergrated modeling of different types of sensors | |
| US11551411B2 (en) | Data processor, data processing method, and data processing program for determining correspondence relationships between laser scanning point clouds | |
| EP3023912A1 (en) | Crack data collection apparatus and server apparatus to collect crack data | |
| CN104574406A (zh) | 一种360度全景激光与多个视觉系统间的联合标定方法 | |
| JP6506032B2 (ja) | 測量データ処理装置、測量データ処理方法およびプログラム | |
| TW201830336A (zh) | 位置姿勢推定裝置以及位置姿勢推定方法 | |
| Tang et al. | Surveying, geomatics, and 3D reconstruction | |
| US20220148216A1 (en) | Position coordinate derivation device, position coordinate derivation method, position coordinate derivation program, and system | |
| Maurice et al. | A photogrammetric approach for map updating using UAV in Rwanda | |
| JP6506031B2 (ja) | 測量データ処理装置、測量データ処理方法およびプログラム | |
| Al-Rawabdeh et al. | A robust registration algorithm for point clouds from UAV images for change detection | |
| Choi et al. | Precise geometric registration of aerial imagery and LIDAR data | |
| US20230196601A1 (en) | Apparatuses and methods for determining the volume of a stockpile | |
| RU2699940C1 (ru) | Способ мониторинга состояния трассы магистрального трубопровода | |
| Chuanxiang et al. | Automatic detection of aerial survey ground control points based on Yolov5-OBB | |
| EP3894788A1 (en) | Method and system for generating an environment model for positioning | |
| KR100586815B1 (ko) | 3차원 위치 추적 시스템 및 방법 | |
| JP2009121945A (ja) | 地物位置測定方法 | |
| Akca et al. | Fast quality control of 3D city models |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180626 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190307 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190522 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190617 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6543520 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |