JP5852915B2 - Vベルト式無段変速機 - Google Patents
Vベルト式無段変速機 Download PDFInfo
- Publication number
- JP5852915B2 JP5852915B2 JP2012082109A JP2012082109A JP5852915B2 JP 5852915 B2 JP5852915 B2 JP 5852915B2 JP 2012082109 A JP2012082109 A JP 2012082109A JP 2012082109 A JP2012082109 A JP 2012082109A JP 5852915 B2 JP5852915 B2 JP 5852915B2
- Authority
- JP
- Japan
- Prior art keywords
- sheave
- belt
- movable sheave
- continuously variable
- press
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 title claims description 42
- 230000007246 mechanism Effects 0.000 claims description 11
- 230000033001 locomotion Effects 0.000 claims description 8
- 230000008859 change Effects 0.000 claims description 2
- 238000004804 winding Methods 0.000 claims description 2
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 239000003638 chemical reducing agent Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000005553 drilling Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 238000010079 rubber tapping Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000002079 cooperative effect Effects 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
Images


















Landscapes
- Transmissions By Endless Flexible Members (AREA)
Description
図18は従来のVベルト式無段変速機の断面図であり、変速機ケース201に駆動側プーリ202と、従動側プーリ203と、これらのプーリ202、203に掛け渡されるVベルト204が収納される。
アクチュエータ210は、サーボモータ211と、このサーボモータ211のモータ軸212に設けられる減速用ギヤ群213と、このギヤ群213で回され回転運動を直線運動に変換するボールねじ214と、このボールねじ214で直線的に移動する出力ロッド215とからなる。
そこで、可動シーブ207の外周面に軸受216を嵌め、この軸受216の外輪217を出力ロッド215で押し引きするようにした。
しかし、特に小型二輪車では、コンパクト化が求められ、Vベルト式無段変速機の大型化は望ましくない。
請求項2に係る発明は、アウタリングは、第2シーブ半体のベルト受け面の裏面と向かい合うコーナー部を面取りしたことを特徴とする。
請求項3に係る発明は、アウタリングのコーナー部の面取りは、ベルト受け面の裏面の傾斜角よりも大きくしたことを特徴とする。
請求項4に係る発明では、第1シーブ半体と第2シーブ半体により、軸受の軸方向両側面を挟むことで、軸受が位置決めされることを特徴とする。
可動シーブを2分割することにより、分割された第1シーブ半体と第2シーブ半体との間に小径のボスを形成し、この小径のボスに軸受を嵌めるようにしたので、従来よりも格段に小径の軸受が採用できるため、軸受の焼き付き防止およびコストダウンが図れると共に、変速機ケースの大型化が回避できる。
すなわち、本発明により、Vベルト式無段変速機の耐久性向上およびコストダウン並びにコンパクト化が図れる。
なお、可動シーブの外周面に軸受を嵌める従来構造のまま軸受を小径化すると、遠心ウエイトの作用が小さくなり、出力の大きなアクチュエータが必要となる。結果、アクチュエータのコストアップ及び大型化ならびに重量増加、更には燃費の悪化をも招く。
スナップリングなどの止め具で軸受を固定する場合に比べ、本発明では、止め具挿入用の溝が不要であり、溝が不要であれば第1シーブ半体又は第2シーブ半体の大型化が回避できる。
したがって、本発明によれば、可動シーブの小型軽量化が図れる。
圧入結合であるから、締結ボルトなどが不要となり、軽量化及びコンパクト化が容易に図れる。
仮に、第1シーブ半体に圧入めす部を設けると、この圧入めす部より径外方にカム面を設けることになる。すると、第1シーブ半体の外径が増大し、可動シーブが大型になる。
この点、本発明では、第1シーブ半体に圧入おす部を設けたので、第1シーブ半体の外径が増大することはなく、可動シーブが大型になる心配はない。
支点ブラケット45は、ボルト52によりケース本体15に締結される。ボルト52を緩めることで支点ブラケット45は、任意にケース本体15から外すことができる。
ソレノイド式アクチュエータ50は、底面がアクチュエータブラケット51に当てられボルト54、54により締結される。ボルト54、54を緩めることでソレノイド式アクチュエータ50は、任意にアクチュエータブラケット51から外すことができる。
シフトフォーク43は、いわゆる二股フォーク形状を呈し、先端にピン穴57、57に挿入するシフトピン58、58を備え、途中に支点ピン44が挿入されるピン穴59を有し、他端に連結ピン46が挿入されるピン穴61を有する。
電磁コイル64に給電すると、電磁力が発生し、鉄心63を吸引する。結果、シフトフォーク43の基部は、引かれる。
すなわち、ソレノイド式アクチュエータ50は、鉄心63と電磁コイル64を主要素として、構造が単純であるため、安価である。一方、サーボモータと呼ばれる制御モータは、連続的に出力ロッドの位置を制御することができるため、高価である。サーボモータを制御する制御部もパルス信号をサーボモータへ与え、出力ロッドの位置をフィードバック制御するため、高価である。このような高価な制御部をソレノイド式アクチュエータ50は必要としない。
図5(b)に示すように、可動シーブ30に、Vベルト14による力Fvと、遠心ウエイト33による力Fwのみが加わる。
すなわち、電磁コイル64に通電を行わない場合は、ソレノイド式アクチュエータ50は、何ら作用を発揮しない。
遠心ウエイト33により可動シーブ30に加わる推力は、クランク軸21の回転数が増加するほど、増大する。
従って、図6(a)に示すように、エンジンの回転数が高くなると可動シーブ30の推力は「曲線A」のように増加する。
図6(a)において、エンジンの回転数が「n」であるときに、曲線A上の点aにあった可動シーブ30の推力は、図6(b)に示すように、ソレノイド式アクチュエータ50で推力が減らされて、点bになる。
従って、可動シーブ30の推力は「曲線A」から一定の推力を減した「曲線B」のようになる。
すなわち、ソレノイド式アクチュエータ50が作用しないときは曲線Aの特性となり、ソレノイド式アクチュエータ50が作用するときは曲線Bの特性となる。
図7に示すように、定格が例えば12V(ボルト)の車載バッテリ67で電磁コイル64に給電する。この給電系、すなわち回路68に、第1スイッチ69、第2スイッチ71及び抵抗72を直列に配置する。直列であれば、第1スイッチ69、第2スイッチ71及び抵抗72の並びは変更可能である。
また、回路68に第2スイッチ71及び抵抗72をバイパスするバイパス回路73を設け、このバイパス回路73に第3スイッチ74を配置する。
Spボタン78が選択されると、第1スイッチ69が入ったままで、第2スイッチ71が断の状態で、第3スイッチ74が入になる。すると、電磁コイル64に12Vが給電される。このときには、可動シーブ30の推力は、図6(b)に示す曲線Bとなる。
Norボタン77が選択されると、第1スイッチ69が入ったままで、第3スイッチ74が断の状態で、第2スイッチ71が入になる。すると、抵抗72で降圧され、電磁コイル64に例えば6Vが給電される。このときには、可動シーブ30の推力は、図6(b)に示す曲線Aと曲線Bとの中間の曲線となる。
図8において、Spボタン78を押すことで曲線Bが選択された場合、図1において、変速に必要な推力を可動シーブ30に与えて図左に移動させるためには、曲線Aよりもエンジンの回転数を上げる必要がある。結果、加速性能が高まり、スポーツ走行が行える。
Norボタン77を押したときには曲線Mが選択され、経済的走行とスポーツ走行の中間的な走行が可能となる。
このように、シフトフォーク43を介在させることで、ソレノイド式アクチュエータ50の設計の自由度が高まる。
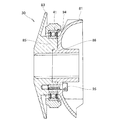
図10に示すように、可動シーブ30は、第1シーブ半体81と、ベルト受け面82を有する第2シーブ半体83とに分割可能とされる。
この例では、第2シーブ半体83に、クランク軸(図1、符号21)より大径で第1シーブ半体81より小径のボス85が設けられる。
第2シーブ半体83のボス85には、外周部に軸受41へ挿入する段部88が設けられ、内周部に中央筒部86の一端を挿入することがきる嵌合凹部89が形成される。
内輪91へ段部88を挿入する、又は段部88へ内輪91を嵌める。次に、嵌合凹部89へ中央筒部86の一端を嵌合し、最後に、ボルト95をねじ込む。
スナップリングなどの止め具で軸受41を固定する場合に比べ、止め具挿入用の溝が不要であり、溝が不要であれば第1シーブ半体81又は第2シーブ半体83の大型化が回避できる。したがって、可動シーブ30の小型軽量化が図れる。
図12は、中央筒部86に圧入おす部96を設け、ボス85に圧入めす部97を設ける。
圧入めす部97に圧入おす部96を圧入することで、第1シーブ半体81と第2シーブ半体83とを一体化した。軸受41は、第1シーブ半体81と第2シーブ半体83とで挟まれ、軸方向の位置決めがなされる。
加えて、圧入結合では、第1シーブ半体81と第2シーブ半体83との心出しが容易である。心出し精度が良好であれば、可動シーブ30の回転バランス性能が高まり、Vベルト式無段変速機10の品質が高まる。
図11のボルト95を省くことができるため、穴開けやタップ加工工数及び部品点数の削減が図れる。
図12では、トルク(回転力)の全てを圧入結合に委ねたが、図13によれば、圧入結合のみでトルク伝達と位置決めを行わせる場合に比較して、伝達トルク値を容易に高めることができる。
なお、図示は省略するが、スプライン98に代えてキー結合を採用しても差し支えない。
図12〜図14では、第1シーブ半体81に圧入おす部96を設け、第2シーブ半体83に圧入めす部97を設けたが、めすとおすを逆にすることができる。
ただし、第1シーブ半体81に圧入めす部97を設けると、この圧入めす部97より径外方にカム面32を設けることになる。すると、第1シーブ半体81の外径が増大し、可動シーブ30が大型になる。この点、図12〜図14では、第1シーブ半体81に圧入おす部96を設けたので、第1シーブ半体81の外径が増大することはなく、可動シーブ30が大型になる心配はない。
しかし、図15に示すように、ボス85にC止め輪99を設け、このC止め輪99と第1シーブ半体81とで軸受41の位置決めを実施しても良い。
図17(a)に示すように、アウタリング42から、1個の膨出部56を延ばし、この膨出部56を、ナット102、102で挟むようにして出力ロッド47に固定する。
アウタリング42をダイレクトに出力ロッド47に連結することにより、揺動レバーを省くことができる。
すなわち、ソレノイド式アクチュエータ50は、揺動レバーとしてのシフトフォーク43を介してアウタリング42に連結することも、直接アウタリング42に連結することも可能である。
例えば、図17(b)に示すように、電動モータ111に減速機112を付属した減速機付きモータ110を準備し、このモータ110のモータ軸113をボールねじ軸114として、このボールねじ軸114にナット115をねじ込み、このナット115を膨出部56に固定する。ボールねじ軸114の回転により、ナット115を介してアウタリング42を押し引きすることができる。なお、モータ軸113とボールねじ軸114とを分離し、カップリングで繋ぐことは差し支えない。また、ボールねじに代えて台形ねじを採用したり、図示は省略するが、ボールねじ軸114を減速機付きモータ110内に組み込んでボールねじ軸114を進退させる機構とし、ボールねじ軸114の進退によりアウタリング42を押し引きしても差し支えない。
Claims (6)
- 駆動側プーリ(20)と、従動側プーリ(13)と、これらのプーリ(20,13)に掛け渡されるVベルト(14)とからなり、さらに前記駆動側プーリ(20)が、クランク軸(21)に固定される固定シーブ(22)と、前記クランク軸(21)に軸方向移動可能に取付けられベルト受け面(82)を有する可動シーブ(30)と、この可動シーブ(30)に沿って配置されるランププレート(31)と、このランププレート(31)と前記可動シーブ(30)との間に配置され前記クランク軸(21)が回されると遠心力により前記可動シーブ(30)を前記固定シーブ(22)側へ押し出す遠心ウエイト(33)と、この遠心ウエイト(33)とは別に設けられ前記可動シーブ(30)の前記軸方向移動を制御するシフト機構(40)と、このシフト機構(40)と前記可動シーブ(30)との間に設けられ前記可動シーブ(30)の回転を許容する軸受(41)とからなり、前記固定シーブ(22)に対して前記可動シーブ(30)を移動させることで前記Vベルト(14)の巻掛け直径を変更させて変速を行うVベルト式無段変速機であって、
前記可動シーブ(30)は、カム面(32)を有する第1シーブ半体(81)と、前記ベルト受け面(82)を有する第2シーブ半体(83)とに分割可能とされ、
前記第1シーブ半体(81)と前記第2シーブ半体(83)との間に前記クランク軸(21)より大径で前記第1シーブ半体(81)より小径のボス(85)が設けられ、このボス(85)に前記軸受(41)を嵌めるようにし、
前記軸受(41)外周には、前記シフト機構(40)に連繋し、前記軸受(41)周を囲うアウタリング(42)を設け、
前記可動シーブ(30)の断面視において、前記アウタリング(42)を前記第2シーブ半体(83)のベルト受け面(82)の裏面と重なる位置に配置した、
ことを特徴とするVベル式無段変速機。 - 前記アウタリング(42)は、前記第2シーブ半体(83)のベルト受け面(82)の裏面と向かい合うコーナー部を面取りしたことを特徴とする請求項1に記載のVベルト式無段変速機。
- 前記アウタリング(42)の前記コーナー部の面取りは、前記ベルト受け面(82)の裏面の傾斜角よりも大きくしたことを特徴とする請求項2に記載のVベルト式無段変速機。
- 前記第1シーブ半体(81)と前記第2シーブ半体(83)により、前記軸受(41)の軸方向両側面を挟むことで、前記軸受(41)が位置決めされることを特徴とする請求項1〜3の何れか1項に記載のVベルト式無段変速機。
- 前記第1シーブ半体(81)と前記第2シーブ半体(83)とは、圧入結合により一体化されていることを特徴とする請求項1〜4の何れか1項に記載のVベルト式無段変速機
。 - 前記圧入結合に係る圧入おす部(96)が前記第1シーブ半体(81)に設けられ、前記圧入おす部(96)が圧入される圧入めす部(97)が前記第2シーブ半体(83)に設けられることを特徴とする請求項5に記載のVベルト式無段変速機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012082109A JP5852915B2 (ja) | 2012-03-30 | 2012-03-30 | Vベルト式無段変速機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012082109A JP5852915B2 (ja) | 2012-03-30 | 2012-03-30 | Vベルト式無段変速機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013210080A JP2013210080A (ja) | 2013-10-10 |
| JP2013210080A5 JP2013210080A5 (ja) | 2015-04-30 |
| JP5852915B2 true JP5852915B2 (ja) | 2016-02-03 |
Family
ID=49528076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012082109A Active JP5852915B2 (ja) | 2012-03-30 | 2012-03-30 | Vベルト式無段変速機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5852915B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6470723B2 (ja) * | 2016-10-06 | 2019-02-13 | 株式会社エフ・シー・シー | 無段変速機 |
| WO2018168575A1 (ja) * | 2017-03-16 | 2018-09-20 | 本田技研工業株式会社 | ベルト式無段変速機 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002013603A (ja) * | 2000-06-29 | 2002-01-18 | Bando Chem Ind Ltd | ベルト式無段変速装置 |
| JP2002206604A (ja) * | 2001-01-12 | 2002-07-26 | Yamaha Motor Co Ltd | Vベルト式自動変速機 |
| JP2004278725A (ja) * | 2003-03-18 | 2004-10-07 | Honda Motor Co Ltd | 車両用無段変速機 |
| JP2011033066A (ja) * | 2009-07-30 | 2011-02-17 | Honda Motor Co Ltd | Vベルト式無段変速機 |
| JP5506601B2 (ja) * | 2010-08-27 | 2014-05-28 | 本田技研工業株式会社 | 無段変速機構造 |
-
2012
- 2012-03-30 JP JP2012082109A patent/JP5852915B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013210080A (ja) | 2013-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1705784B1 (en) | Straddle-type hybrid vehicle | |
| US8365856B2 (en) | Shifting system for a motorcycle, and motorcycle incorporating same | |
| US6012538A (en) | Driving unit for an electric motor driven bicycle | |
| US7895911B2 (en) | Shift control device for a vehicle | |
| US10137961B2 (en) | Bicycle drive unit | |
| US20150377303A1 (en) | Multiple plate clutch | |
| CN104670415A (zh) | 摩托车的换档杆装置 | |
| US10167053B2 (en) | Bicycle drive unit | |
| US10994802B2 (en) | Bicycle transmission device | |
| EP1953428B1 (en) | Transmission | |
| JP5960474B2 (ja) | Vベルト式無段変速機 | |
| JP5852915B2 (ja) | Vベルト式無段変速機 | |
| US10563762B2 (en) | Vehicle speed-change system | |
| US7635054B2 (en) | Clutch actuator, engine unit, and saddle type vehicle | |
| EP3438489B1 (en) | Power transmission device | |
| US20100013420A1 (en) | Reverse drive control for a motorcycle | |
| JP5039308B2 (ja) | 回転電機 | |
| JP6706381B2 (ja) | ベルト式無段変速機 | |
| EP1564441B1 (en) | V-belt type variable speed drive | |
| JP2008067450A (ja) | 回転電機、エンジン及び鞍乗型車両 | |
| WO2021053742A1 (ja) | リーン車両 | |
| JP7485848B2 (ja) | ストラドルドビークル | |
| JP6487887B2 (ja) | 動力伝達装置 | |
| JP2011179567A (ja) | ベルト式無段変速装置 | |
| CN212509275U (zh) | 自动往复运动的单向离合器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150722 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5852915 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |