JP5841353B2 - 内視鏡装置および画像取得方法 - Google Patents
内視鏡装置および画像取得方法 Download PDFInfo
- Publication number
- JP5841353B2 JP5841353B2 JP2011116091A JP2011116091A JP5841353B2 JP 5841353 B2 JP5841353 B2 JP 5841353B2 JP 2011116091 A JP2011116091 A JP 2011116091A JP 2011116091 A JP2011116091 A JP 2011116091A JP 5841353 B2 JP5841353 B2 JP 5841353B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- image
- unit
- illumination
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 32
- 238000005286 illumination Methods 0.000 claims description 132
- 238000012360 testing method Methods 0.000 claims description 95
- 238000003384 imaging method Methods 0.000 claims description 43
- 238000003780 insertion Methods 0.000 claims description 40
- 230000037431 insertion Effects 0.000 claims description 40
- 230000007423 decrease Effects 0.000 claims description 11
- 230000000903 blocking effect Effects 0.000 claims description 6
- 238000001514 detection method Methods 0.000 claims description 5
- 230000003287 optical effect Effects 0.000 description 29
- 238000005259 measurement Methods 0.000 description 18
- 238000012986 modification Methods 0.000 description 16
- 230000004048 modification Effects 0.000 description 16
- 239000000835 fiber Substances 0.000 description 13
- 230000008569 process Effects 0.000 description 11
- 229910052736 halogen Inorganic materials 0.000 description 5
- 150000002367 halogens Chemical class 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000010363 phase shift Effects 0.000 description 4
- 230000001678 irradiating effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 0 C*12I**1(C1)C1CC2 Chemical compound C*12I**1(C1)C1CC2 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 1
- 229910052753 mercury Inorganic materials 0.000 description 1
- 238000004377 microelectronic Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00006—Operational features of endoscopes characterised by electronic signal processing of control signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0605—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements for spatially modulated illumination
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0655—Control therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1077—Measuring of profiles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1079—Measuring physical dimensions, e.g. size of the entire body or parts thereof using optical or photographic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0661—Endoscope light sources
- A61B1/0684—Endoscope light sources using light emitting diodes [LED]
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/04—Force
- F04C2270/041—Controlled or regulated
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Signal Processing (AREA)
- Endoscopes (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Description
本発明の内視鏡装置は、光の明暗パターンが投影された被検物のパターン投影画像を用いて前記被検物の計測を行う内視鏡装置であって、挿入部と、前記挿入部の先端部に設けられ、前記被検物の画像を取得する撮像部と、前記撮像部の観察視野を照明する照明光を発する第一光源が設けられた照明部と、前記被検物に前記明暗パターンを投影するための投影光を発する第二光源が設けられたパターン投影部と、前記撮像部によって前記画像を取得する動作、前記照明部から前記照明光を出射する動作、および前記パターン投影部から前記投影光を出射する動作を制御する制御部と、を備え、前記制御部は、前記第一光源からの前記照明光の出射が開始されてから前記照明光の光量が前記画像の取得に必要な光量に達するまでの時間と、前記第二光源からの前記投影光の出射が開始されてから前記投影光の光量が前記画像の取得に必要な光量に達するまでの時間とに基づいて、前記照明部と前記縞投影部とのうち光量が前記画像の取得に必要な光量に達するまでの時間が長い方を先に動作させて前記被検物の第一の画像を前記撮像部に取得させ、前記照明部と前記縞投影部とのうち光量が前記画像の取得に必要な光量に達するまでの時間が短い方を前記第一の画像の取得後に動作させて前記被検物の第二の画像を前記撮像部に取得させる、ことを特徴とする内視鏡装置である。
ことを特徴とする内視鏡装置である。
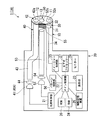
まず、本実施形態の内視鏡装置1の構成について説明する。図1は、内視鏡装置1の構成を示すブロック図である。図2は、内視鏡装置1によって投影される明暗パターンを示す模式図である。
内視鏡装置1は、被検物の内部観察や、通常の観察装置がアクセス困難な位置にある被検物の観察などに使用されるものであり、長尺の挿入部10と、挿入部10の基端が接続された本体部20とを備える。
また、挿入部10の先端面10aには、撮像部30の対物光学系32に外光を入射させるための開口11と、照明部40からの照明光を挿入部の前方に照射するための照明窓12と、パターン投影部50からの明暗パターンを挿入部の前方に照射するための投影窓13とが設けられている。本実施形態では、パターン投影部50は明暗パターンとして、縞パターンを披検物に投影するものとする。
光源制御部21は、第一光源41および第二光源51、並びにメイン制御部21に接続されており、メイン制御部22による制御に基づいて第一光源41および第二光源51のオン/オフを制御する。
ROM26は、たとえばファームウェア等が記録されており、内視鏡装置1の起動時にファームウェア等が読み出されるようになっている。
補助記憶装置25は、たとえば書き換え可能な不揮発メモリを有する記憶装置や磁気記憶装置などを採用することができる。
メイン制御部22には、第一光源41からの照明光の出射が開始されてから照明光の光量が安定するまでの時間wa(図4参照)と、第二光源51からの投影光の出射が開始されてから投影光の光量が安定するまでの時間wb(図4参照)とが予め記憶されている。これらの時間は、光源の種類によって、あるいは実測値に基づいて定めることができる。本実施形態では、第一光源41がハロゲンランプであり第二光源51がLED光源であることにより、時間waが時間wbより長いという関係になっている。
メイン制御部22は、照明光が照射された状態の被検物の画像(以下、「明視野画像」と称する。)と、投影光による縞パターンが投影された状態の被検物の画像(以下、「パターン投影画像」と称する。)とを、イメージャー制御部33を制御することによって撮像部30に取得させる。本実施形態では、明視野画像が先に取得される第一の画像であり、パターン投影画像が後に取得される第二の画像である。
ブレ検出手段には、2枚の画像において許容するずれ量の閾値が予め記憶されている。ブレ検出手段は、公知の手段により2枚の画像におけるずれ量を検出し、2枚の画像におけるずれ量が閾値を超えている場合には、挿入部10と被検物との間の相対移動(以下、「ブレ」と称する。)があったと判定する。
図3は、内視鏡装置1の使用時の動作を説明するためのフローチャートである。図4は、内視鏡装置1の使用時における光量と時間との関係を示すグラフである。
本実施形態の画像取得方法は、内視鏡装置を用いて、被検物に照明光を照射して被検物の画像を取得し、投影光を用いて縞パターンを被検物に投影して被検物の画像を取得する方法である。また、本実施形態の内視鏡装置1は、取得された画像を用いて被検物の三次元形状を計測することができる。
ステップS1において観察状態となっていると判定された場合にはステップS3へ進み、ステップS1において観察状態以外(例えば後述する計測状態)となっている場合にはステップS2へ進む。
これでステップS1は終了する。
ステップS2では、第一光源41をオン制御し、第二光源51をオフ制御する。これにより、パターン投影部50からは縞パターンが投影されずに照明部40から観察視野に白色光が照射され、観察視野が照明される。
図4に示すように、ステップS2において第一光源41が時間ta0においてオン制御されると、第一光源41の光量は増加し、時間ta1において第一光源41の光量が安定する。本実施形態では、第一光源41の光量が安定した時間ta1の後、明視野画像の取得をすることができる。
これでステップS2は終了し、ステップS3へ進む。
ステップS3では、照明部40からの照明光によって被検物を照明している状態で撮像部30のイメージャー31によって画像(明視野画像)を取得する。
ステップS3において撮影された明視野画像は、RAM24に一時記憶される。
これでステップS3は終了し、ステップS4へ進む。
ステップS4では、メイン制御部22の指令に基づいて、第一光源41をオフ制御し、第二光源51をオン制御する。図4に示すように、ステップS4において第二光源51が時間tb0においてオン制御されると、第二光源51の光量は増加し、時間tb1において第二光源51の光量が安定する。本実施形態では、第二光源51の光量が安定した時間tb1の後、パターン投影画像の取得をすることができる。
被検物に投影される縞パターンは、図2に示すように、白色光源による明部R1と、縞パターン生成部55によって遮光された暗部R2とが交互に並べられたパターンとなる。これにより、適切な縞が1ヶ所から被検物に投影されている状態(以下、この状態を「パターン投影状態」と称する。)となる。
また、合計時間D4の方が合計時間D3の方が短い場合は、メイン制御部22は、パターン投影部50を先に動作させ、照明部40を後に動作させる。
このようにすることで、第一の画像の取得を開始する時間ta1から下記ステップS5において第二の画像の取得を終了するまでの時間を、さらに短くすることができる。
これでステップS4は終了し、ステップS5へ進む。
ステップS5では、被検物に投影された縞パターンは、被検物の三次元形状に応じて変化したパターンとなっている。この状態で、撮像部30のイメージャー31によって1枚の画像を取得する(以下、パターン投影状態で撮影された画像を「パターン投影画像」と称する。)。
ステップS5において撮影されたパターン投影画像は、RAM24に一時記憶される。
これでステップS5は終了し、ステップS6へ進む。
上記時間wbは、第一光源41の点灯が開始されてから第一光源41の光量が安定するまでの時間waよりも短い。このため、本実施形態の場合には、第二光源51を第一光源41よりも後に点灯させることにより、2枚の画像(明視野画像およびパターン投影画像)を取得する間隔が、第一光源41を第二光源51よりも後に点灯させる場合よりも短くなっている。
このように、上記ステップS2ないしステップS5では、照明光の出射が開始されてから照明光の光量が安定するまでの時間waと、投影光の出射が開始されてから投影光の光量が安定するまでの時間wbとに基づいて、光量が安定するまでの時間が長い照明光を用いて被検物の明視野画像を取得し、明視野画像を取得した後に、光量が安定するまでの時間が短い投影光を用いて被検物のパターン投影画像を取得する。
ステップS6では、まず、RAM24に記憶された明視野画像とパターン投影画像とのそれぞれから同一の特徴点を検出し、2枚の画像における特徴点の座標を算出する。
これでステップS6は終了し、ステップS7に進む。
ステップS7では、2枚の画像における特徴点の座標がそれぞれの画像において同一の座標にあれば、最初の画像と後の画像とにブレは生じていないと判定し、ステップS8へ進む。逆に、2枚の画像における特徴点の座標がそれぞれの画像において異なる座標にあれば、最初の画像と後の画像とにブレが生じていると判定し、ブレが生じているので再度の撮影が必要であることを示すメッセージをモニター28に表示し(ステップS11)、一連の処理を終了する。
これでステップS7は終了する。
ステップS8では、例えば「計測を実施?」などの問い合わせをモニター28に表示し、撮影したパターン投影画像を用いた三次元計測の実施の可否の入力を使用者に促す。
計測の実施が可であるとの入力があった場合には、ステップS9へ進む。
計測の実施が否であるとの入力があった場合には、ステップS12へ進む。
これでステップS8は終了する。
ステップS9では、RAM24に記憶されたパターン投影画像に基づいて、三次元形状の解析を行う。たとえば、本実施形態では、1枚のパターン投影画像を用いて、例えば公知の空間的位相シフト法あるいはフーリエ変換法によって被検物の三次元形状を解析する。
三次元形状の解析結果は、テキストファイルあるいはバイナリーファイルとして生成され、パターン投影画像とともに補助記憶装置25に保存される。なお、ステップS9は、ステップS8の開始と同時にステップS8のバックグラウンド処理として行われてもよい。
これでステップS9は終了し、ステップS10へ進む。
ステップS10では、ステップS3において取得した明視野画像上に、ステップS9において解析された結果をオーバーレイ表示する等、明視野画像に表示された被検物の三次元形状をモニター28に表示する。これにより、使用者は、被検物の三次元形状を知ることができる。
これでステップS10は終了し、一連の処理は終了する。
ステップS12では、上記ステップS9と同様に、RAM24に記憶されたパターン投影画像に基づいて、三次元形状の解析を行う。たとえば、本実施形態では、1枚のパターン投影画像を用いて、例えば公知の空間的位相シフト法あるいはフーリエ変換法によって被検物の三次元形状を解析する。
また、明視野画像、パターン投影画像、三次元形状の解析結果、および解析に用いた光学的パラメータを、それぞれバイナリーファイルあるいはテキストファイルとして補助記憶装置25に保存する。この場合、例えばファイル名の一部を共通としたり、1つのディレクトリ(フォルダ)にこれらのファイルをまとめて保存したりすることにより、後で一括して読み出すことができるように補助記憶装置25にこれらのファイルが保存される。
これでステップS12は終了し、一連の処理は終了する。
次に、上述の実施形態で説明した内視鏡装置1および画像取得方法の変形例について説明する。
図5は、本変形例の内視鏡装置1Aの使用時における光量と時間との関係を示すグラフである。
本変形例の内視鏡装置1A(図1参照)は、第一光源41に代えて、シャッターモジュールを有する第一光源41Aが設けられている点と、メイン制御部22の動作とが上述の内視鏡装置1と異なっている。
第一光源41Aのシャッターモジュールは、光源制御部21によって開閉動作が制御されるシャッターである。
上記時間wdは、第二光源51の点灯が開始されてから第二光源52の光量が安定するまでの時間wcよりも短い。このため、本変形例の場合には、第一光源41Aを第二光源51よりも後に点灯させることにより、2枚の画像(明視野画像およびパターン投影画像)を取得する間隔が、第二光源51を第一光源41Aよりも後に点灯させる場合よりも短くなっている。
また、シャッターモジュールを有する第一光源41Aが採用されているので、第一光源41Aからの光の出射が開始されてから第一光源41Aの光量が安定する時間wdは、光源自体の光量が安定するまでの時間ではなく、シャッターが開閉する時間に依存する。このため、光量が安定するまでにかかる時間が長い光源を採用してもよく、光源の選択の自由度が高まる。
たとえば、上述の実施形態では、第一光源と第二光源との組み合わせとしてそれぞれハロゲンランプとLED光源とによる例を示したが、第一光源がLED光源であって第二光源がハロゲンランプである組み合わせを採用することもできる。この場合、光量が安定するまでの時間が長いのは第二光源となるので、上述の変形例で示した順序と同様に、パターン投影画像を先に取得させ、明視野画像をその後に取得させるようにメイン制御部は構成される。
また、挿入部の先端面に複数の照明窓が開口されていてもよい。
10 挿入部
11 開口
12 照明窓
13 投影窓
20 操作部
21 光源制御部
22 メイン制御部
30 撮像部
32 対物光学系
33 イメージャー制御部
40 照明部
41 第一光源
50 パターン投影部
51 第二光源
Claims (5)
- 光の明暗パターンが投影された被検物のパターン投影画像を用いて前記被検物の計測を行う内視鏡装置であって、
挿入部と、
前記挿入部の先端部に設けられ、前記被検物の画像を取得する撮像部と、
前記撮像部の観察視野を照明する照明光を発する第一光源が設けられた照明部と、
前記被検物に前記明暗パターンを投影するための投影光を発する第二光源が設けられたパターン投影部と、
前記撮像部によって前記画像を取得する動作、前記照明部から前記照明光を出射する動作、および前記パターン投影部から前記投影光を出射する動作を制御する制御部と、
を備え、
前記制御部は、
前記第一光源からの前記照明光の出射が開始されてから前記照明光の光量が前記画像の取得に必要な光量に達するまでの時間と、前記第二光源からの前記投影光の出射が開始されてから前記投影光の光量が前記画像の取得に必要な光量に達するまでの時間とに基づいて、
前記照明部と前記縞投影部とのうち光量が前記画像の取得に必要な光量に達するまでの時間が長い方を先に動作させて前記被検物の第一の画像を前記撮像部に取得させ、
前記照明部と前記縞投影部とのうち光量が前記画像の取得に必要な光量に達するまでの時間が短い方を前記第一の画像の取得後に動作させて前記被検物の第二の画像を前記撮像部に取得させる、
ことを特徴とする内視鏡装置。 - 光の明暗パターンが投影された被検物のパターン投影画像を用いて前記被検物の計測を行う内視鏡装置であって、
挿入部と、
前記挿入部の先端部に設けられ、前記被検物の画像を取得する撮像部と、
前記撮像部の観察視野を照明する照明光を発する第一光源が設けられた照明部と、
前記被検物に前記明暗パターンを投影するための投影光を発する第二光源が設けられたパターン投影部と、
前記撮像部によって前記画像を取得する動作、前記照明部から前記照明光を出射する動作、および前記パターン投影部から前記投影光を出射する動作を制御する制御部と、
を備え、
前記制御部は、
前記照明光を出射している前記第一光源の停止または前記照明光の遮断を開始してから前記照明光の光量が前記画像の取得に影響がない光量まで減少するまでの時間と、前記投影光を出射している前記第二光源の停止または前記投影光の遮断を開始してから前記投影光の光量が前記画像の取得に影響がない光量まで減少するまでの時間とに基づいて、
前記照明部と前記パターン投影部とのうち前記画像の取得に影響がない光量まで減少するまでの時間が短い方を先に動作させて前記被検物の第一の画像を前記撮像部に取得させ、
前記照明部と前記パターン投影部とのうち前記画像の取得に影響がない光量まで減少するまでの時間が長い方を前記第一の画像の取得後に動作させて前記被検物の第二の画像を前記撮像部に取得させる、
ことを特徴とする内視鏡装置。 - 光の明暗パターンが投影された被検物のパターン投影画像を用いて前記被検物の計測を行う内視鏡装置であって、
挿入部と、
前記挿入部の先端部に設けられ、前記被検物の画像を取得する撮像部と、
前記撮像部の観察視野を照明する照明光を発する第一光源が設けられた照明部と、
前記被検物に前記明暗パターンを投影するための投影光を発する第二光源が設けられたパターン投影部と、
前記撮像部によって前記画像を取得する動作、前記照明部から前記照明光を出射する動作、および前記パターン投影部から前記投影光を出射する動作を制御する制御部と、
を備え、
前記照明光を出射している前記第一光源の停止または前記照明光の遮断を開始してから前記照明光の光量が前記画像の取得に影響がない光量まで減少するまでの時間と、前記第二光源からの前記照明光の出射が開始されてから前記照明光の光量が前記画像の取得に必要な光量に達するまでの時間との合計時間が、
前記投影光を出射している前記第二光源の停止または前記投影光の遮断を開始してから前記投影光の光量が前記画像の取得に影響がない光量まで減少するまでの時間と、前記第一光源からの前記照明光の出射が開始されてから前記照明光の光量が前記画像の取得に必要な光量に達するまでの時間との合計時間よりも短い場合は、
前記照明部を先に動作させて前記被検物の第一の画像を前記撮像部に取得させた後に前記パターン投影部を動作させて前記被検物の第二の画像を前記撮像部に取得させる、
また、
前記照明光を出射している前記第一光源の停止または前記照明光の遮断を開始してから前記照明光の光量が前記画像の取得に影響がない光量まで減少するまでの時間と、前記第二光源からの前記照明光の出射が開始されてから前記照明光の光量が前記画像の取得に必要な光量に達するまでの時間との合計時間が、
前記投影光を出射している前記第二光源の停止または前記投影光の遮断を開始してから前記投影光の光量が前記画像の取得に影響がない光量まで減少するまでの時間と、前記第一光源からの前記照明光の出射が開始されてから前記照明光の光量が前記画像の取得に必要な光量に達するまでの時間との合計時間よりも長い場合は、
前記パターン投影部を先に動作させて前記被検物の第一の画像を前記撮像部に取得させた後に前記照明部を動作させて前記被検物の第二の画像を前記撮像部に取得させる、
ことを特徴とする内視鏡装置。 - 請求項1〜請求項3の何れか1項に記載の内視鏡装置であって、
前記第一光源と前記第二光源との少なくともいずれかに、光の出射状態を切り替えるシャッターが設けられていることを特徴とする内視鏡装置。 - 請求項1〜請求項4の何れか1項に記載の内視鏡装置であって、
前記制御部は、前記照明光が照射された状態で取得された前記被検物の画像と前記投影光が照射された状態で取得された前記被検物の画像とから少なくとも2枚の画像を選択して前記2枚の画像のずれ量に基づいて前記挿入部と前記被検物とのブレを検出するブレ検出手段を備えることを特徴とする内視鏡装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011116091A JP5841353B2 (ja) | 2011-05-24 | 2011-05-24 | 内視鏡装置および画像取得方法 |
| PCT/JP2012/063271 WO2012161246A1 (ja) | 2011-05-24 | 2012-05-24 | 内視鏡装置および画像取得方法 |
| EP12788847.7A EP2700347B1 (en) | 2011-05-24 | 2012-05-24 | Endoscope and image acquisition method |
| US14/079,357 US9451872B2 (en) | 2011-05-24 | 2013-11-13 | Endoscope and image acquisition method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011116091A JP5841353B2 (ja) | 2011-05-24 | 2011-05-24 | 内視鏡装置および画像取得方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012239829A JP2012239829A (ja) | 2012-12-10 |
| JP5841353B2 true JP5841353B2 (ja) | 2016-01-13 |
Family
ID=47217319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011116091A Active JP5841353B2 (ja) | 2011-05-24 | 2011-05-24 | 内視鏡装置および画像取得方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9451872B2 (ja) |
| EP (1) | EP2700347B1 (ja) |
| JP (1) | JP5841353B2 (ja) |
| WO (1) | WO2012161246A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3153949A1 (en) | 2012-12-24 | 2014-07-03 | Dentlytec G.P.L. Ltd | Device and method for subgingival measurement |
| JP2015129715A (ja) * | 2014-01-08 | 2015-07-16 | リコーエレメックス株式会社 | 検査装置及び検査装置の制御方法 |
| CN106028930B (zh) | 2014-02-21 | 2021-10-22 | 3D集成公司 | 包括手术器械的套件 |
| WO2016020966A1 (ja) * | 2014-08-04 | 2016-02-11 | 株式会社ニコン | 検出方法、形状測定方法、形状測定装置、構造物製造方法、構造物製造システム、及び形状測定プログラム |
| US10136970B2 (en) | 2015-01-18 | 2018-11-27 | Dentlytec G.P.L.Ltd | System, device, and method for dental intraoral scanning |
| US10966614B2 (en) * | 2015-01-18 | 2021-04-06 | Dentlytec G.P.L. Ltd. | Intraoral scanner |
| EP3636196A1 (en) | 2015-05-01 | 2020-04-15 | Dentlytec G.P.L. Ltd. | System, device and methods for dental digital impressions |
| EP3316019A4 (en) * | 2015-06-25 | 2019-03-06 | Olympus Corporation | DEVICE WITH ENDOSCOPE |
| EP3145419B1 (en) | 2015-07-21 | 2019-11-27 | 3dintegrated ApS | Cannula assembly kit, trocar assembly kit and minimally invasive surgery system |
| US11020144B2 (en) | 2015-07-21 | 2021-06-01 | 3Dintegrated Aps | Minimally invasive surgery system |
| DK178899B1 (en) | 2015-10-09 | 2017-05-08 | 3Dintegrated Aps | A depiction system |
| JP6687877B2 (ja) * | 2015-10-14 | 2020-04-28 | 凸版印刷株式会社 | 撮像装置及びそれを用いた内視鏡装置 |
| WO2018047180A1 (en) | 2016-09-10 | 2018-03-15 | Ark Surgical Ltd. | Laparoscopic workspace device |
| EP3648703B1 (en) | 2017-07-04 | 2023-04-26 | Dentlytec G.P.L. Ltd. | Dental scanner with ultrasonic sensor component for augmentation of optical data |
| EP3658069B1 (en) | 2017-07-26 | 2024-06-26 | Dentlytec G.P.L. Ltd. | Intraoral scanner |
| JP7134759B2 (ja) * | 2018-07-13 | 2022-09-12 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用画像処理装置及び医療用観察システム |
| JP7297891B2 (ja) | 2018-07-19 | 2023-06-26 | アクティブ サージカル, インコーポレイテッド | 自動化された外科手術ロボットのためのビジョンシステム内の深度のマルチモード感知のためのシステムおよび方法 |
| JP2022526626A (ja) | 2019-04-08 | 2022-05-25 | アクティブ サージカル, インコーポレイテッド | 医療撮像のためのシステムおよび方法 |
| WO2021035094A1 (en) | 2019-08-21 | 2021-02-25 | Activ Surgical, Inc. | Systems and methods for medical imaging |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03128043A (ja) * | 1989-10-16 | 1991-05-31 | Toshiba Corp | 形状計測内視鏡装置 |
| JP3126065B2 (ja) * | 1991-12-09 | 2001-01-22 | オリンパス光学工業株式会社 | 計測用内視鏡装置 |
| JPH0961132A (ja) * | 1995-08-28 | 1997-03-07 | Olympus Optical Co Ltd | 3次元形状計測装置 |
| DE19636354A1 (de) * | 1996-09-02 | 1998-03-05 | Ruedger Dipl Ing Rubbert | Verfahren und Vorrichtung zur Durchführung von optischen Aufnahmen |
| JP4229791B2 (ja) | 2003-09-19 | 2009-02-25 | 真 金子 | 内視鏡装置 |
| JP2009061014A (ja) * | 2007-09-05 | 2009-03-26 | Fujifilm Corp | 硬さ測定装置、硬さ測定方法、および内視鏡システム |
| US7821649B2 (en) | 2008-03-05 | 2010-10-26 | Ge Inspection Technologies, Lp | Fringe projection system and method for a probe suitable for phase-shift analysis |
| JP2009240621A (ja) | 2008-03-31 | 2009-10-22 | Hoya Corp | 内視鏡装置 |
| US20100268069A1 (en) * | 2009-04-16 | 2010-10-21 | Rongguang Liang | Dental surface imaging using polarized fringe projection |
| PL2438397T3 (pl) * | 2009-06-01 | 2019-05-31 | Dentsply Sirona Inc | Sposób i urządzenie do trójwymiarowej detekcji powierzchni z dynamiczną ramką odniesienia |
| JP2011229850A (ja) * | 2010-04-30 | 2011-11-17 | Fujifilm Corp | 内視鏡装置、方法およびプログラム |
-
2011
- 2011-05-24 JP JP2011116091A patent/JP5841353B2/ja active Active
-
2012
- 2012-05-24 WO PCT/JP2012/063271 patent/WO2012161246A1/ja active Application Filing
- 2012-05-24 EP EP12788847.7A patent/EP2700347B1/en not_active Not-in-force
-
2013
- 2013-11-13 US US14/079,357 patent/US9451872B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012161246A1 (ja) | 2012-11-29 |
| EP2700347A4 (en) | 2014-04-16 |
| JP2012239829A (ja) | 2012-12-10 |
| US20140066784A1 (en) | 2014-03-06 |
| US9451872B2 (en) | 2016-09-27 |
| EP2700347A1 (en) | 2014-02-26 |
| EP2700347B1 (en) | 2015-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5841353B2 (ja) | 内視鏡装置および画像取得方法 | |
| JP5830270B2 (ja) | 内視鏡装置および計測方法 | |
| US10898110B2 (en) | Endoscope apparatus and measuring method | |
| JP5846763B2 (ja) | 内視鏡装置 | |
| CN110021042B (zh) | 图像检查装置及照明装置 | |
| JP6032870B2 (ja) | 計測方法 | |
| JP2010019762A (ja) | 表面形状測定方法及び表面形状測定装置 | |
| JP5893264B2 (ja) | 内視鏡装置 | |
| JP5204547B2 (ja) | 内部検査装置 | |
| JP2008125989A (ja) | 内視鏡ポイント光照射位置調整システム | |
| US9232890B2 (en) | Ophthalmologic apparatus and ophthalmologic imaging method | |
| JP6238555B2 (ja) | 内視鏡システム | |
| US20130162801A1 (en) | Microscope | |
| CN102379682A (zh) | 眼科摄像装置及使用眼科摄像装置的摄像方法 | |
| WO2015019957A1 (ja) | 内視鏡システム、内視鏡システムの作動方法 | |
| JP3650143B2 (ja) | 顕微鏡写真撮影装置 | |
| JP2012130573A (ja) | ホワイトバランス調整システムおよび内視鏡プロセッサ | |
| KR20110038481A (ko) | 고속기판검사장치 및 이를 이용한 고속기판검사방법 | |
| JP2015023433A (ja) | 撮像装置及びその制御方法 | |
| JP2007071893A (ja) | 形状計測装置 | |
| JP2011232112A (ja) | 検査装置及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150609 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151027 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151113 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5841353 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |