(第1の実施形態)
以下、図1から図17を参照して、本発明を実施したミラー駆動装置を備える撮像装置としてのデジタル一眼レフカメラについて説明する。図1は第1の実施形態におけるデジタル一眼レフカメラを表した中央断面模式図である。
図1に図示するように、デジタル一眼レフカメラは、カメラボディ200と、カメラボディ200に着脱可能な撮影レンズ100から構成される。撮影レンズ100はフォーカスレンズ群やズームレンズ群からなるレンズ部101を備えている。
撮影レンズ100の予定結像面付近には、CMOSセンサなどの撮像素子201が配置される。
撮影レンズ100と撮像素子201の間には、ハーフミラー部202aを有するメインミラー202とサブミラー203が撮影光軸102aに対して45°傾けて配置される。メインミラー202は回転軸202cを中心に矢印304方向に回動することができる。メインミラー202およびサブミラー203は、ミラーダウン位置とミラーアップ位置との間を移動可能に構成される。
メインミラー202がミラーダウン位置規制部であるダウンストッパ208に当接する状態をミラーダウン位置とする。そして、ミラーアップ位置規制部であるアップストッパ209に当接し、メインミラー202およびサブミラー203が撮影光軸102aから退避した状態をミラーアップ位置とする。
さらに、メインミラー202が回動動作途中にあり、つまりミラーダウン位置とミラーアップ位置の間にあるときを、ミラー駆動位置とする。サブミラー203はメインミラー202の回動動作に連動してメインミラー202に対して回動する。
メインミラー202およびサブミラー203がミラーダウン位置にある場合は、メインミラー202で反射した光線はマット面とフレネル面を備えるピント板205のマット面上に結像し、ペンタプリズム206を介して、接眼光学系207に導かれる。光軸102cはメインミラー202のハーフミラー部202aで反射した撮影光軸を示している。
また、メインミラー202のハーフミラー部202aを透過した光線はサブミラー203で反射し、焦点検出部204に導かれる。光軸102bはメインミラー202のハーフミラー部202aを通過し、サブミラー203で反射する光線の撮影光軸を示す。メインミラー202がミラーアップ位置にある場合、撮影レンズ100を通過した光線は撮像素子201の撮像面上に結像する。
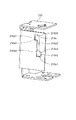
次に、メインミラー202およびサブミラー203をミラーダウン位置とミラーアップ位置との間で駆動するミラー駆動ユニットについて述べる。図2は、本発明の第1の実施形態としてのミラー駆動ユニット(ミラー駆動装置)の斜視図である。
図2に図示するように、ミラー駆動ユニットは、メインミラー202、ミラー駆動ホルダー211、駆動ナット210、リードスクリュー214、ステップモーター213、駆動ユニットベース216で構成される。
メインミラー202は、ミラーダウン位置とミラーアップ位置との間を移動可能なミラー部材として機能する。ミラー駆動ホルダー211は、矢印300方向(第4の方向)または矢印301方向(第3の方向)に直進移動することでメインミラー202をミラーダウン位置とミラーアップ位置との間で駆動するミラー駆動部材として機能する。
駆動ナット210は、リードスクリュー214と噛み合い、ミラー駆動ホルダー211に回転可能に取り付けられる回転部材として機能する。ステップモーター213は、駆動源として機能する。リードスクリュー214はステップモーター213によって矢印302方向(第2の方向)または矢印303方向(第1の方向)に回転駆動されるリードスクリューとして機能する。規制溝216aが形成される駆動ユニットベース216は、規制部材として機能する。
ステップモーター213はモーターベース227に取り付けられる。ステップモーター213が取り付けられたモーターベース227が駆動ユニットベース216に取り付けられる。ステップモーター213の回転軸にはピニオンギア226が固定される。リードスクリュー214が駆動ユニットベース216に回転可能に取り付けられる。駆動ユニットベース216にはリードスクリュー214をステップモーター213に向けて付勢する板バネ225が取り付けられている。
リードスクリュー214は、ミラーダウン位置となるときのメインミラー202の駆動ピン202bと、ミラーアップ位置となるときの駆動ピン202bとを結ぶ線とが略平行となるように、駆動ユニットベース216に配置される。リードスクリュー214にはギア部214aが形成され、リードスクリュー214のギア部214aはピニオンギア226と噛み合う。駆動ユニットベース216には、リードスクリュー214と平行になるようにガイド軸215が取り付けられている。
したがって、ガイド軸215もミラーダウン位置となるときの駆動ピン202bと、ミラーアップ位置となるときの駆動ピン202bとを結ぶ線とが略平行となるように、駆動ユニットベース216に配置される。
図3は、リードスクリュー214と駆動ナット210の拡大斜視図である。図3に図示するように、駆動ナット210には突起210aが形成されている。
図4は、ミラー駆動ホルダー211の拡大斜視図である。ミラー駆動ホルダー211は、ガイド軸215にガイドされて、矢印300または矢印301方向に直進移動する。
図4に図示するように、ミラー駆動ホルダー211には、バネ取付部211a、駆動ナット保持部211b、駆動ピン係合部211cが形成されている。バネ取付部211aには、トーションばね212の巻き線部が遊嵌されている。駆動ピン係合部211cには、メインミラー202に形成される駆動ピン202bが挿入されている。駆動ピン係合部211cには、駆動ピンストッパ211c1および211c2が形成される。
バネ取付部211aに取り付けられたトーションばね212の一端がミラー駆動ホルダー211に掛けられ、トーションばね212の他端が駆動ピン202bに掛けられる。これによって、トーションばね212は、駆動ピン202bを駆動ピンストッパ211c1に向けて付勢する。
駆動ナット保持部211bには、リードスクリュー214に噛み合う駆動ナット210が回転可能に保持される。
図5はリードスクリュー214の回転中心軸で切断したリードスクリュー214と駆動ナット210との断面図である。図5に図示するように、リードスクリュー214の歯214bと駆動ナット210の歯210cとが噛み合っている。リードスクリュー214が回転すると、リードスクリュー214の歯214bと駆動ナット210の歯210cとの接触面に生ずる摩擦力によって、駆動ナット210もリードスクリュー214の回転方向に回転する。
そのため、リードスクリュー214を回転駆動すると、駆動ナット210は、リードスクリュー214とともに回転し、リードスクリュー214に沿って直進移動しない。すなわち、ミラー駆動ホルダー211に対する駆動ナット210の回転が許容されるときには、リードスクリュー214が回転駆動されても駆動ナット210およびミラー駆動ホルダー211が直進移動しない。
図6は駆動ユニットベース216の拡大斜視図である。図6に図示するように、駆動ユニットベース216には、規制溝216aが形成されている。規制溝216aには、第1の面216a1〜第8の面216a8が形成されている。第1の面216a1、第3の面216a3、第6の面216a6および第8の面216a8は、リードスクリュー214の軸方向と略直交する面となるように形成されている。第2の面216a2、第4の面216a4、第5の面216a5および第7の面216a7は、リードスクリュー214の軸方向と略平行な面となるように形成されている。図2に図示するように、駆動ナット210を噛合させたリードスクリュー214を駆動ユニットベース216に取り付けると、駆動ナット210の突起210aが規制溝216aと係合する。
図7〜16は、第1の実施形態のミラー駆動ユニットが、メインミラー202およびサブミラー203をミラーダウン位置からミラーアップ位置との間に駆動する様子を説明する図である。
図7(a)は、メインミラー202およびサブミラー203がミラーダウン位置にある状態のミラー駆動ユニットの側面図である。図7(b)は、図7(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図7(a)のA方向から見た図である。図7(c)は、図7(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図7(a)のB方向から見た図である。
図7(a)に図示するように、メインミラー202およびサブミラー203がミラーダウン位置にある状態では、メインミラー202がダウンストッパ208に当接し、駆動ピン202bは駆動ピンストッパ211c1に当接していない。したがって、ミラーダウン位置におけるメインミラー202の角度は、ダウンストッパ208の位置とメインミラー回転軸202cの位置のみによって決定される。そのため、ミラー駆動ユニットの取り付け誤差や、ミラー駆動ユニット動部の部品公差によって、ミラーダウン位置でのメインミラー202、およびサブミラー203の位置がばらつくことがない。
図7(c)に図示するように、駆動ナット210の突起210aは規制溝216aの第2の面216a2に当接している。このとき、突起210aの上端面が規制溝216aの第3の面216a3に係止され、駆動ナット210は矢印300方向の直進移動が規制される。この状態では、ミラー駆動ホルダー211の矢印300方向の直進移動も規制される。
したがって、図7に図示する状態では、ステップモーター213へ通電することなく、メインミラー202およびサブミラー203がミラーダウン位置にある状態を維持できる。
図7に図示する状態において、規制溝216aは、駆動ナット210の矢印303方向の回転および矢印300方向の直進移動を規制し、駆動ナット210の矢印302方向の回転および矢印301方向の直進移動を許容する。
図7に図示した状態から、ステップモーター213によってリードスクリュー214が矢印303方向に回転駆動されると、図8に図示する状態になる。
図8(a)は、メインミラー202およびサブミラー203がミラーダウン位置にある状態でのミラー駆動ユニットの側面図である。図8(b)は、図8(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図8(a)のA方向から見た図である。図8(c)は、図8(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図8(a)のB方向から見た図である。
リードスクリュー214を矢印303方向に回転駆動させると、図8(c)に図示するように、突起210aが規制溝216aの第2の面216a2に当接したまま、駆動ナット210およびミラー駆動ホルダー211が矢印301方向に直進移動する。このとき、メインミラー202はダウンストッパ208に当接しているので、図8(a)に図示するように、駆動ピン202bがトーションばね212の付勢力に抗して駆動ピンストッパ211c2に当接する。
図8(c)に図示するように、突起210aの上端面と規制溝216aの第3の面216a3との間には隙間が出現する。また、このとき、突起210aの下端面と規制溝216aの第1の面216a1との間にも隙間が出現する。
図8に図示する状態において、規制溝216aは、駆動ナット210の矢印303方向の回転を規制し、駆動ナット210の矢印302方向の回転、矢印300および矢印301方向の直進移動を許容する。
図8の状態から、ステップモーター213によってリードスクリュー214が矢印302方向に回転駆動されると、図9に図示する状態になる。
図9(a)は、メインミラー202およびサブミラー203がミラーダウン位置にある状態でのミラー駆動ユニットの側面図である。図9(b)は、図9(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図9(a)のA方向から見た図である。図9(c)は、図9(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図9(a)のB方向から見た図である。
図9(b)、(c)に図示するように、リードスクリュー214が矢印302方向に回転駆動されると、突起210aが規制溝216aの第4の面216a4に当接するまで、駆動ナット210が矢印302方向に回転する。図8(c)に図示したように、規制溝216aと突起210aの上端面および下端面との間にはそれぞれ隙間がある。したがって、規制溝216aと突起210aとの間に生じる摩擦の影響を受けることなく、駆動ナット210を図8の状態から図9の状態まで矢印302方向に回転させることができる。
図9に図示する状態において、規制溝216aは、駆動ナット210の矢印302方向の回転を規制し、駆動ナット210の矢印303方向の回転、矢印300および矢印301方向の直進移動を許容する。
図9の状態から、ステップモーター213によってリードスクリュー214が矢印302方向に回転駆動されると、図10に図示する状態になる。
図10(a)は、メインミラー202およびサブミラー203がミラーアップ動作中でのミラー駆動ユニットの側面図である。図10(b)は、図10(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図10(a)のA方向から見た図である。図10(c)は、図10(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図10(a)のB方向から見た図である。
リードスクリュー214を矢印302方向に回転駆動させると、図10(c)に図示するように、突起210aが規制溝216aの第4の面216a4に当接したまま、駆動ナット210およびミラー駆動ホルダー211が矢印300方向へ直進移動する。これによって、図10(a)に図示するように、メインミラー202およびサブミラー203はミラーアップ動作を開始し、メインミラー202はダウンストッパ208から離れていく。
図10に図示する状態において、規制溝216aは、駆動ナット210の矢印302方向の回転を規制し、駆動ナット210の矢印303方向の回転、矢印300および矢印301方向の直進移動を許容する。図10の状態においても、規制溝216aは、駆動ナット210の矢印303方向の回転を許容するが、その許容回転量は図9に図示する状態よりも小さくなる。
図10の状態から、ステップモーター213によってリードスクリュー214が矢印302方向に回転駆動されると、図11に図示する状態になる。
図11(a)は、メインミラー202およびサブミラー203がミラーアップ位置にある状態のミラー駆動ユニットの側面図である。図11(b)は、図11(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図11(a)のA方向から見た図である。図11(c)は、図11(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図11(a)のB方向から見た図である。
図11(a)に図示するように、メインミラー202およびサブミラー203がミラーアップ位置にある状態では、メインミラー202がアップストッパ209に当接する。アップストッパ209は、衝撃吸収のためにモルト材やゴムなどの弾性材料によって構成されているために、メインミラー202のバウンドが収束した状態ではメインミラー202により矢印300方向に力を受け、アップストッパ209が圧縮変形する。
メインミラー202のミラーアップ位置はこのアップストッパ209の変形を加味して設定されており、この位置において撮影レンズ100を通過し、撮像素子201へ入射する撮影光束と干渉しないように設計されている。
この状態では、図11(c)に図示するように、突起210aと規制溝216aの第4の面216a4との当接が解除された状態となる。
図11に図示するように、メインミラー202がミラーアップ位置まで駆動されたとき、規制溝216aは、駆動ナット210の矢印302方向の回転を許容する。図11の状態において、規制溝216aは、駆動ナット210の矢印303方向の回転、矢印300および矢印301方向の直進移動も許容する。
図9に図示した状態から図11に図示する状態の直前までの間、駆動ナット210は、矢印302方向の回転を規制され、矢印303方向の回転、矢印300および矢印301方向の直進移動を許容されている。
図11の状態から、ステップモーター213によってリードスクリュー214が矢印302方向に回転駆動されると、図12に図示する状態になる。
図12(a)は、メインミラー202およびサブミラー203がミラーアップ位置にある状態でのミラー駆動ユニットの側面図である。図12(b)は、図12(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図12(a)のA方向から見た図である。図12(c)は、図12(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図12(a)のB方向から見た図である。
リードスクリュー214を矢印302方向に回転駆動させると、図12(b)、(c)に図示するように、突起210aは規制溝216aの第7の面216a7に当接するまで矢印302方向へ回転する。このとき、突起210aの下端面は規制溝216aの第8の面216a8を摺動する。図11に図示した状態から図12に図示する状態までの間では、駆動ナット210がリードスクリュー214とともに回転して、駆動ナット210は矢印300方向に直進移動しない。
図12(c)に図示するように、駆動ナット210の突起210aは規制溝216aの第7の面216a7に当接している。このとき、突起210aの下端面が規制溝216aの第8の面216a8に係止され、駆動ナット210は矢印301方向の直進移動が規制される。この状態では、ミラー駆動ホルダー211の矢印301方向の直進移動も規制される。
したがって、図12に図示する状態では、ステップモーター213へ通電することなく、メインミラー202およびサブミラー203がミラーアップ位置にある状態を維持できる。
図12に図示する状態において、駆動ナット210は、矢印302方向の回転および矢印301方向の直進移動を規制され、矢印303方向の回転および矢印300方向の直進移動を許容されている。
図12に図示した状態から、ステップモーター213によってリードスクリュー214が矢印302方向に回転駆動されると、図13に図示する状態になる。
図13(a)は、メインミラー202およびサブミラー203がミラーアップ位置にある状態でのミラー駆動ユニットの側面図である。図13(b)は、図13(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図13(a)のA方向から見た図である。図13(c)は、図13(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図13(a)のB方向から見た図である。
リードスクリュー214を矢印302方向に回転駆動させると、図13(c)に図示するように、突起210aが規制溝216aの第7の面216a7に当接したまま、駆動ナット210およびミラー駆動ホルダー211が矢印300方向に直進移動する。このとき、メインミラー202はアップトッパ209をさらに圧縮変形させる。
図13(c)に図示するように、突起210aの下端面と規制溝216aの第8の面216a8との間にも隙間が出現する。また、このとき、突起210aの上端面と規制溝216aの第6の面216a6との間には隙間が出現する。
図13に図示する状態において、規制溝216aは、駆動ナット210の矢印302方向の回転を規制し、駆動ナット210の矢印303方向の回転、矢印300および矢印301方向の直進移動を許容する。
図13の状態から、ステップモーター213によってリードスクリュー214が矢印303方向に回転駆動されると、図14に図示する状態になる。
図14(a)は、メインミラー202およびサブミラー203がミラーアップ位置にある状態でのミラー駆動ユニットの側面図である。図14(b)は、図14(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図14(a)のA方向から見た図である。図14(c)は、図14(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図14(a)のB方向から見た図である。
図14(b)、(c)に図示するように、リードスクリュー214が矢印303方向に回転駆動されると、突起210aが規制溝216aの第5の面216a5に当接するまで、駆動ナット210が矢印303方向に回転する。図13(c)に図示したように、規制溝216aと突起210aの上端面および下端面との間にはそれぞれ隙間がある。したがって、規制溝216aと突起210aとの間に生じる摩擦の影響を受けることなく、駆動ナット210を図13の状態から図14の状態まで矢印303方向に回転させることができる。
図14に図示するように、ミラー駆動ホルダー211がメインミラー202をミラーダウン位置へ駆動するとき、規制溝216aは、駆動ナット210の矢印303方向の回転を規制し、駆動ナット210の矢印301方向の直進移動を許容する。図14の状態において、規制溝216aは、駆動ナット210の矢印302方向の回転および矢印300方向の直進移動も許容する。
図14の状態から、ステップモーター213によってリードスクリュー214が矢印303方向に回転駆動されると、図15に図示する状態になる。
図15(a)は、メインミラー202およびサブミラー203がミラーダウン動作中でのミラー駆動ユニットの側面図である。図15(b)は、図15(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図15(a)のA方向から見た図である。図15(c)は、図15(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図15(a)のB方向から見た図である。
リードスクリュー214を矢印303方向に回転駆動させると、図15(c)に図示するように、突起210aが規制溝216aの第5の面216a5に当接したまま、駆動ナット210およびミラー駆動ホルダー211が矢印301方向へ直進移動する。これによって、図15(a)に図示するように、メインミラー202およびサブミラー203はミラーダウン動作を開始し、メインミラー202はアップストッパ209から離れていく。
図15に図示するように、ミラー駆動ホルダー211がメインミラー202をミラーダウン位置へ駆動するとき、規制溝216aは、駆動ナット210の矢印303方向の回転を規制し、駆動ナット210の矢印301方向の直進移動を許容する。図15の状態において、規制溝216aは、駆動ナット210の矢印302方向の回転および矢印300方向の直進移動も許容する。図15の状態においても、規制溝216aは、駆動ナット210の矢印302方向の回転を許容するが、その許容回転量は図14の状態よりも小さくなる。
図15の状態から、ステップモーター213によってリードスクリュー214が矢印303方向に回転駆動されると、図16に図示する状態になる。
図16(a)は、メインミラー202およびサブミラー203がミラーダウン位置にある状態のミラー駆動ユニットの側面図である。図16(b)は、図11(a)の状態におけるミラー駆動ホルダー211、駆動ナット210、トーションばね212、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図16(a)のA方向から見た図である。図16(c)は、図16(a)の状態における駆動ナット210、リードスクリュー214、ガイド軸215および駆動ユニットベース216を、図16(a)のB方向から見た図である。
図16(a)に図示するように、メインミラー202およびサブミラー203がミラーダウン位置にある状態では、メインミラー202がダウンストッパ208に当接する。
この状態では、図16(c)に図示するように、突起210aと規制溝216aの第5の面216a5との当接が解除された状態となる。
図16に図示するように、メインミラー202がミラーダウン位置まで駆動されたとき、規制溝216aは、駆動ナット210の矢印303方向の回転を許容する。図16の状態において、規制溝216aは、駆動ナット210の矢印302方向の回転、矢印300および矢印301方向の直進移動も許容する。
図14に図示した状態から図16に図示する状態の直前までの間、駆動ナット210は、矢印303方向の回転を規制され、矢印302方向の回転、矢印300および矢印301方向の直進移動を許容されている。
図16の状態から、ステップモーター213によってリードスクリュー214が矢印303方向に回転駆動されると、図7(b)、(c)に図示するように、突起210aは規制溝216aの第2の面216a2に当接するまで矢印303方向へ回転する。このとき、突起210aの上端面は規制溝216aの第3の面216a3を摺動する。図16に図示した状態から図7に図示した状態までの間では、駆動ナット210がリードスクリュー214とともに回転して、駆動ナット210は矢印301方向に直進移動しない。
カメラボディ200は、メインミラー202およびサブミラー203が図7に図示するミラーダウン位置にある状態で撮影動作を開始すると、ステップモーター213がリードスクリュー214を矢印303方向に回転駆動して、図8に図示する状態にする。その後、ステップモーター213がリードスクリュー214を矢印302方向に回転駆動して、図9〜12で説明したミラーアップ動作を実行する。そして、メインミラー202およびサブミラー203が図12に図示するミラーアップ位置にある状態で露光動作を実行する。露光動作が終了すると、ステップモーター213がリードスクリュー214を矢印302方向に回転駆動して、図13に図示する状態にする。その後、ステップモーター213がリードスクリュー214を矢印303方向に回転駆動し、図14〜16で説明したミラーダウン動作を実行する。
本実施形態では、ミラー駆動ホルダー211がメインミラー202をミラーダウン位置とミラーアップ位置との間で駆動する際には、ミラー駆動ホルダー211に対する駆動ナット210の回転が規制される。これによって、駆動ナット210はミラー駆動ホルダー211とともに直進移動する。ミラー駆動ホルダー211がメインミラー202をミラーダウン位置またはミラーアップ位置まで駆動すると、ミラー駆動ホルダー211に対する駆動ナット210の回転が許容され、駆動ナット210の直進移動が規制される。したがって、電力を消費することなくミラー部材がミラーダウン位置に保持することができ、ミラー部材をミラーダウン位置に保持するための駆動源も要しない。
(第1の実施形態の変形例)
図17は、第1の実施形態の変形例を説明する図である。図17は、図7(c)に対応する図である。図17に図示する変形例では、駆動ナット310の突起310aの形状および駆動ユニットベース316に形成される規制溝316aの形状が上述した第1の実施形態とは異なる。
すなわち、上述した第1の実施形態では、規制溝216aの第3の面216a3および第8の面216a8は、リードスクリュー214の軸方向と略直交する面となるように形成されていた。これに対して、本変形例では、メインミラー202がミラーダウン位置となるときに駆動ナット310の突起310aが摺動する規制溝316aの第3の面316a3を上方に傾斜させている。また、メインミラー202がミラーアップ位置となるときに駆動ナット310の突起310aが摺動する規制溝316aの第8の面316a8を下方に傾斜させている。
これによって、変形例では、ステップモーター213へ通電することなく、メインミラー202およびサブミラー203がミラーダウン位置またはミラーアップ位置にある状態をより確実に維持できる。