JP5733112B2 - 車両および車両の制御方法 - Google Patents
車両および車両の制御方法 Download PDFInfo
- Publication number
- JP5733112B2 JP5733112B2 JP2011188340A JP2011188340A JP5733112B2 JP 5733112 B2 JP5733112 B2 JP 5733112B2 JP 2011188340 A JP2011188340 A JP 2011188340A JP 2011188340 A JP2011188340 A JP 2011188340A JP 5733112 B2 JP5733112 B2 JP 5733112B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- battery
- evaluation
- discharge
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Hybrid Electric Vehicles (AREA)
- Secondary Cells (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
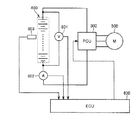
算出部610は、バッテリ400のLi塩の偏りの変化に応じて上述のバッテリ劣化評価値Dを算出する。算出部610は、算出部611と、記憶部612と、算出部613とを含む。算出部611は、充放電電流Iからバッテリ400のSOCを算出する。記憶部612は、算出部613で算出されたバッテリ劣化評価値Dを記憶する。算出部613は、放電電流値I、バッテリ温度TB、記憶部612に記憶されたバッテリ劣化評価値D(前回値)に基づいて、バッテリ劣化評価値D(今回値)を算出する。具体的な算出手法については後述の図5〜図7を用いて詳細に説明する。
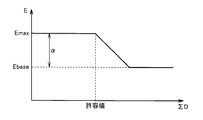
目標値設定部623は、記憶部622に記憶されたバッテリ劣化積算値ΣDを読み出し、バッテリ劣化積算値ΣDに応じて目標値Eを可変制御する。
S204にて、ECU600は、メモリに記憶されたバッテリ劣化積算値ΣDを読み出す。
Claims (7)
- 電池と、
前記電池の放電を制御する制御装置とを備え、
前記制御装置は、前記電池の放電継続に起因する前記電池の劣化の度合いを示す評価値の積算値が前記電池に要求される寿命を確保可能な許容値を超える場合、前記評価値の積算値が前記許容値未満である場合よりも前記電池の放電を制限することを促す処理を行なう、車両。 - 前記制御装置は、制限条件の成立時に前記制限条件の不成立時よりも前記電池の放電を制限し、
前記制御装置は、前記評価値の積算値が前記許容値を超える場合、前記評価値の積算値が前記許容値未満である場合よりも前記制限条件を成立し易い条件に変更する、請求項1に記載の車両。 - 前記制限条件は、前記評価値がしきい値を超えたという条件であり、
前記制御装置は、前記評価値の積算値が前記許容値を超える場合、前記評価値の積算値が前記許容値未満である場合よりも前記しきい値を小さい値に変更する、請求項2に記載の車両。 - 前記制御装置は、前記評価値の積算値が前記許容値未満であるときは前記しきい値を基準値よりも大きい最大値とし、前記評価値の積算値が前記許容値を超えた場合は前記しきい値を前記最大値から前記基準値まで段階的に低下させる、請求項3に記載の車両。
- 前記制御装置は、直近の所定期間分の前記評価値の合計値を前記評価値の積算値として算出する、請求項1に記載の車両。
- 前記制御装置は、前記電池を流れる電流の履歴から前記電池の電解質中におけるイオン濃度の偏りの変化を推定し、前記イオン濃度の偏りが増加すると推定される場合に前記評価値を増加させ、前記イオン濃度の偏りが減少すると推定される場合に前記評価値を低下させる、請求項1に記載の車両。
- 電池と前記電池の放電を制御する制御装置とを備えた車両の制御方法であって、
前記電池の放電継続に起因する前記電池の劣化の度合いを示す評価値の積算値を算出するステップと、
前記評価値の積算値が前記電池に要求される寿命を確保可能な許容値を超える場合、前記評価値の積算値が前記許容値未満である場合よりも前記電池の放電を制限することを促す処理を行なうステップとを含む、車両の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011188340A JP5733112B2 (ja) | 2011-08-31 | 2011-08-31 | 車両および車両の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011188340A JP5733112B2 (ja) | 2011-08-31 | 2011-08-31 | 車両および車両の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013051115A JP2013051115A (ja) | 2013-03-14 |
| JP5733112B2 true JP5733112B2 (ja) | 2015-06-10 |
Family
ID=48013006
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011188340A Active JP5733112B2 (ja) | 2011-08-31 | 2011-08-31 | 車両および車両の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5733112B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3032690B1 (en) | 2013-08-09 | 2021-02-24 | Hitachi Automotive Systems, Ltd. | Battery control system and vehicle control system |
| CN105453373B (zh) | 2013-08-09 | 2018-03-02 | 日立汽车系统株式会社 | 电池控制系统、车辆控制系统 |
| DE102014210197A1 (de) * | 2014-05-28 | 2015-12-03 | Robert Bosch Gmbh | Verfahren zum Batteriemanagement und Batteriemanagementsystem |
| JP6128066B2 (ja) | 2014-06-24 | 2017-05-17 | トヨタ自動車株式会社 | 電池管理システム |
| WO2016092811A1 (ja) * | 2014-12-10 | 2016-06-16 | 株式会社Gsユアサ | 蓄電素子状態推定装置及び蓄電素子状態推定方法 |
| JP6459864B2 (ja) * | 2015-09-02 | 2019-01-30 | トヨタ自動車株式会社 | バッテリ制御装置 |
| JP6504100B2 (ja) * | 2016-04-12 | 2019-04-24 | トヨタ自動車株式会社 | バッテリ放電制御装置 |
| JP6610410B2 (ja) | 2016-04-25 | 2019-11-27 | トヨタ自動車株式会社 | 自動車 |
| JP7163571B2 (ja) * | 2017-10-03 | 2022-11-01 | 株式会社Gsユアサ | 劣化量推定装置、蓄電システム、劣化量推定方法、及びコンピュータプログラム |
| US11975732B2 (en) | 2019-09-25 | 2024-05-07 | Panasonic Intellectual Property Management Co., Ltd. | In-vehicle notification device, notification program, and calculation device |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4952031B2 (ja) * | 2006-04-14 | 2012-06-13 | トヨタ自動車株式会社 | 電源装置および電源装置における入出力制限設定方法並びに車両およびその制御方法 |
| JP5054338B2 (ja) * | 2006-07-20 | 2012-10-24 | 本田技研工業株式会社 | 車両用電源の制御装置およびその制御方法 |
| JP4494453B2 (ja) * | 2007-11-13 | 2010-06-30 | トヨタ自動車株式会社 | 二次電池の制御装置および制御方法 |
| KR101343963B1 (ko) * | 2011-01-27 | 2013-12-20 | 도요타 지도샤(주) | 축전장치의 제어장치 및 제어방법 |
-
2011
- 2011-08-31 JP JP2011188340A patent/JP5733112B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013051115A (ja) | 2013-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5733112B2 (ja) | 車両および車両の制御方法 | |
| JP4494453B2 (ja) | 二次電池の制御装置および制御方法 | |
| JP5862631B2 (ja) | 蓄電システム | |
| JP4961830B2 (ja) | 蓄電装置の充放電制御装置および充放電制御方法ならびに電動車両 | |
| WO2013051104A1 (ja) | 充電制御装置および充電制御方法 | |
| US8886479B2 (en) | Charge state detecting device for battery pack and method for detecting charge state | |
| JP5305025B2 (ja) | ハイブリッド車両 | |
| WO2012101678A1 (ja) | 蓄電装置の制御装置および制御方法 | |
| WO2013046263A1 (ja) | 非水二次電池の制御装置および制御方法 | |
| US9758155B2 (en) | Control apparatus for vehicle | |
| JP2012006525A (ja) | ハイブリッド車の回生制御装置 | |
| US10160444B2 (en) | Vehicle | |
| JP6156129B2 (ja) | 二次電池の制御装置 | |
| US9868434B2 (en) | Vehicle and control method for vehicle | |
| JP6075018B2 (ja) | 電動車両の制御装置およびそれを備える電動車両、ならびに電動車両の制御方法 | |
| JPWO2015029507A1 (ja) | 発電制御装置及び発電制御方法 | |
| JP5772209B2 (ja) | 蓄電装置の充放電制御装置およびそれを搭載した電動車両 | |
| JP7183614B2 (ja) | 車両の駆動システムの駆動制御装置 | |
| JP5842607B2 (ja) | 非水二次電池の制御装置および制御方法 | |
| JP2020103006A (ja) | 車両用充電制御システム | |
| US8868272B2 (en) | Electric vehicle and method of controlling the same | |
| JP5267875B2 (ja) | 車両の制御装置 | |
| JP2013243869A (ja) | 二次電池の制御装置 | |
| JP6780549B2 (ja) | 充電制御装置 | |
| JP7226201B2 (ja) | 充電制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150317 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150330 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5733112 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |