JP5659029B2 - ステージ機構およびステージ機構を用いたdnaシーケンサ - Google Patents
ステージ機構およびステージ機構を用いたdnaシーケンサ Download PDFInfo
- Publication number
- JP5659029B2 JP5659029B2 JP2011014688A JP2011014688A JP5659029B2 JP 5659029 B2 JP5659029 B2 JP 5659029B2 JP 2011014688 A JP2011014688 A JP 2011014688A JP 2011014688 A JP2011014688 A JP 2011014688A JP 5659029 B2 JP5659029 B2 JP 5659029B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- joint
- feed screw
- torsional rigidity
- screw shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Vibration Prevention Devices (AREA)
- Transmission Devices (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Details Of Measuring And Other Instruments (AREA)
- Microscoopes, Condenser (AREA)
Description
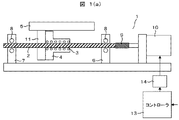
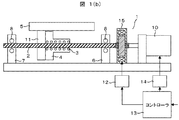
2 送りねじ軸
3 ボール
4 ナット
5,25 可動テーブル
6 第1軸受台
7 第2軸受台
8 サポートベアリング
9 継手
10 回転駆動手段
11 ホルダ
12 D/Aボード
13 コントローラ
14 モータドライバ
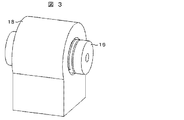
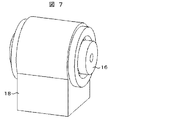
15 ねじり剛性可変機構付き継手
16 低剛性継手
17 可変粘性体操作部
18 可変粘性体操作部固定子
19 カバー
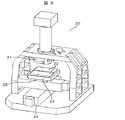
20 DNAシーケンサ
21 対物レンズ
22 フローセル
23 セルホルダ
24 XYステージ
Claims (15)
- 送りねじ軸と、前記送りねじ軸に螺合され、ステージが取り付けられるナットと、前記送りねじ軸を回転させる回転駆動手段と、前記回転駆動手段と前記送りねじを連結する継手と、前記継手のねじり剛性を制御する制御手段を備え、
前記継手は、溝を有する弾性体と、前記溝に充填された磁性流体と、前記磁性流体を前記溝に閉じ込めるカバーと、磁場を印加する電磁コイルと、電磁コイルを固定するための固定子とを備え、
弾性体、磁性流体、およびカバーは、電磁コイルが固定された固定子の内側に当該固定子との間に隙間を持って配置されている、ステージ機構。 - 送りねじ軸と、前記送りねじ軸に螺合され、ステージが取り付けられるナットと、前記送りねじ軸を回転させる回転駆動手段と、前記回転駆動手段と前記送りねじを連結する継手と、前記継手のねじり剛性を制御する制御手段を備え、
前記継手は、溝を有する弾性体と、前記溝に充填された電気粘性流体と、電場を印加する電極と、前記磁性流体を前記溝に閉じ込めるカバーと、電場を印加する電極と、電極を固定するための固定子とを備え、
弾性体、電気粘性流体、およびカバーは、電磁コイルが固定された固定子の内側に当該固定子との間に隙間を持って配置されている、ステージ機構。 - 前記制御手段は、前記ステージが移動開始すると前記継手のねじり剛性を第1の値に設定し、前記被送り部材が目標位置近傍に到達すると前記継手のねじり剛性を第1の値よりも高い第2の値に設定することを特徴とする請求項1または2に記載のステージ機構。
- 前記制御手段は、ねじり剛性を第1の値から第2の値へ変化させるとき、徐々に変化させることを特徴とする請求項3記載のステージ機構。
- 前記弾性体は、金属ばね継手であることを特徴とする請求項1または2に記載のステージ機構。
- 前記電磁コイルに電流を流す機構を備え、該機構により電磁コイルに電流を流すとトルク軸線上に磁界が発生することを特徴とする請求項1に記載のステージ機構。
- 前記電極に電圧を印加する機構を備え、該機構により電極に電圧を印加するとトルク軸線上に電界が発生することを特徴とする請求項2に記載のステージ機構。
- 送りねじ軸と、前記送りねじ軸に螺合され、ステージが取り付けられるナットと、前記送りねじ軸を回転させる回転駆動手段と、前記回転駆動手段と前記送りねじを連結する継手と、前記継手のねじり剛性を制御する制御手段を備えるステージ機構と、
ステージと、
前記ステージ上に固定されたフローセルと、前記フローセル上の観察サンプルと試薬の反応状態を画像として撮像するための撮像手段と、前記画像を解析して塩基配列情報を検出する解析手段とを備え、
前記継手は、溝を有する弾性体と、前記溝に充填された磁性流体と、前記磁性流体を前記溝に閉じ込めるカバーと、磁場を印加する電磁コイルと、電磁コイルを固定するための固定子とを備え、
弾性体、磁性流体、およびカバーは、電磁コイルが固定された固定子の内側に当該固定子との間に隙間を持って配置されている、
ことを特徴とするDNAシーケンサ。 - 送りねじ軸と、前記送りねじ軸に螺合され、ステージが取り付けられるナットと、前記送りねじ軸を回転させる回転駆動手段と、前記回転駆動手段と前記送りねじを連結する継手と、前記継手のねじり剛性を制御する制御手段を備えるステージ機構と、
ステージと、
前記ステージ上に固定されたフローセルと、前記フローセル上の観察サンプルと試薬の反応状態を画像として撮像するための撮像手段と、前記画像を解析して塩基配列情報を検出する解析手段とを備え、
前記継手は、溝を有する弾性体と、前記溝に充填された電気粘性流体と、電場を印加する電極と、前記磁性流体を前記溝に閉じ込めるカバーと、電場を印加する電極と、電極を固定するための固定子とを備え、
弾性体、電気粘性流体、およびカバーは、電磁コイルが固定された固定子の内側に当該固定子との間に隙間を持って配置されている、ことを特徴とするDNAシーケンサ。 - 前記制御手段は、前記ステージが移動開始すると前記継手のねじり剛性を第1の値に設定し、前記被送り部材が目標位置近傍に到達すると前記継手のねじり剛性を第1の値よりも高い第2の値に設定することを特徴とする請求項8または9に記載のDNAシーケンサ。
- 前記制御手段は、ねじり剛性を第1の値から第2の値へ変化させるとき、徐々に変化さ
せることを特徴とする請求項10記載のDNAシーケンサ。 - 前記弾性体は、金属ばね継手であることを特徴とする請求項8または9に記載のDNAシーケンサ。
- 前記電磁コイルに電流を流す機構を備え、該機構により電磁コイルに電流を流すとトルク軸線上に磁界が発生することを特徴とする請求項8に記載のDNAシーケンサ。
- 前記電極に電圧を印加する機構を備え、該機構により電極に電圧を印加するとトルク軸
線上に電界が発生することを特徴とする請求項9に記載のDNAシーケンサ。 - 撮像手段は固定されており、前記ステージは移動と停止を繰り返し行うことを特徴とす
る請求項8または9に記載のDNAシーケンサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011014688A JP5659029B2 (ja) | 2011-01-27 | 2011-01-27 | ステージ機構およびステージ機構を用いたdnaシーケンサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011014688A JP5659029B2 (ja) | 2011-01-27 | 2011-01-27 | ステージ機構およびステージ機構を用いたdnaシーケンサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012152149A JP2012152149A (ja) | 2012-08-16 |
| JP5659029B2 true JP5659029B2 (ja) | 2015-01-28 |
Family
ID=46834596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011014688A Active JP5659029B2 (ja) | 2011-01-27 | 2011-01-27 | ステージ機構およびステージ機構を用いたdnaシーケンサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5659029B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6442386B2 (ja) * | 2015-09-29 | 2018-12-19 | 本田技研工業株式会社 | 力制御装置 |
| CN107916220A (zh) * | 2016-10-11 | 2018-04-17 | 广州康昕瑞基因健康科技有限公司 | Xy平台丝杆驱动安装结构 |
| CN115749032B (zh) * | 2022-12-05 | 2024-05-24 | 重庆交通大学 | 一种位移和加速度分级双控混合阻尼器 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5862450U (ja) * | 1981-10-20 | 1983-04-27 | オンキヨー株式会社 | ミラ−支持駆動装置 |
| JPH0375803A (ja) * | 1989-08-17 | 1991-03-29 | Taiyo Kogyo Kk | サーボ系の位置決め装置 |
| JPH07256534A (ja) * | 1994-03-17 | 1995-10-09 | Nikon Corp | ステージ装置 |
| JP2001310232A (ja) * | 2000-04-28 | 2001-11-06 | Matsushita Electric Ind Co Ltd | 移動ステージの精密送り装置 |
| JP5086011B2 (ja) * | 2007-09-12 | 2012-11-28 | カヤバ工業株式会社 | 磁気粘性流体緩衝器 |
| JP5268444B2 (ja) * | 2008-06-23 | 2013-08-21 | 株式会社日立ハイテクノロジーズ | 単分子リアルタイムシーケンス装置,核酸分析装置及び単分子リアルタイムシーケンス方法 |
-
2011
- 2011-01-27 JP JP2011014688A patent/JP5659029B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012152149A (ja) | 2012-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104320016B (zh) | 基于粘滑惯性的串联式三自由度压电精密驱动平台 | |
| KR102357171B1 (ko) | 가진 장치 | |
| KR102181674B1 (ko) | 동전형 액추에이터 및 동전형 가진 장치 | |
| JP6013704B2 (ja) | 電動アクチュエータ | |
| JP5659029B2 (ja) | ステージ機構およびステージ機構を用いたdnaシーケンサ | |
| KR101109542B1 (ko) | Bldc 모터의 능동형 부하 시험 장치 | |
| JP4437844B2 (ja) | 工作機械用スピンドル駆動機構 | |
| JP2017201258A (ja) | 疲労試験方法、および、疲労試験装置 | |
| CN110545050B (zh) | 压电执行器驱动的目标图像跟踪云台及其驱动控制方法 | |
| JP4990282B2 (ja) | 工具移動アクチュエータ | |
| JP2009211024A (ja) | アクチュエータおよびマニピュレータ | |
| CN109374326B (zh) | 含间隙运动副机构非线性动力学特性综合测试实验台 | |
| JP2009106153A (ja) | 圧電モータ及び圧電モータ付き電子機器 | |
| JP5899537B2 (ja) | リニアアクチュエータおよび中ぐり加工装置 | |
| US20220198956A1 (en) | Motion training apparatus | |
| JP2002295590A (ja) | 制振装置 | |
| JP4717466B2 (ja) | 移送装置{transferapparatus} | |
| KR20170116800A (ko) | 비틀림 시험장치 | |
| JP6718333B2 (ja) | 動電型試験装置 | |
| KR20190088534A (ko) | 전동 액츄에이터 | |
| JP5376323B2 (ja) | コントローラ | |
| JP2014065123A (ja) | パラレルリンクロボット | |
| RU2350476C2 (ru) | Устройство для нанесения изображения на твердой поверхности | |
| US20110163221A1 (en) | Method for controlling deflection in structural member | |
| JP4482582B2 (ja) | 圧電素子の急速変形に伴う衝撃力を利用した小型精密位置決め装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120522 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140527 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140724 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141201 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5659029 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |