本発明の実施の形態に係る車両用前照灯の配光制御システムは、自車の前方に存在する前走車を検出し、該検出の結果に基づいて複数の配光パターンのうちから最適な配光パターンを選択して照射するものである。この配光制御システムは、照射範囲がそれまでよりも広くなる配光パターンに切り替える場合には、照射範囲が狭くなる配光パターンに切り替える場合よりも前走車の検出にかける時間を長く設定する。例えば、ロービーム用配光パターンからハイビーム用配光パターンに切り替える場合には、逆の場合よりも前走車の検出にかける時間を長くする。これにより、照射範囲が広くなる配光パターンに切り替える場合の前走車の検出精度を高めることが可能となり、前走車にグレアを与えるのを防止することができる。
以下、図面を参照して本発明の実施の形態について詳細に説明する。
図1は、本発明の実施の形態に係る配光制御システムにおいて用いられる車両用前照灯210の内部構造を示す概略断面図である。図1に示す車両用前照灯210は、車両の車幅方向の左右に1灯ずつ配置される配光可変式前照灯であり、その構造は実質的に左右同等なので代表して車両右側に配置される車両用前照灯210Rの構造を説明する。
車両用前照灯210Rは、車両前方方向に開口部を有するランプボディ212と、ランプボディ212の開口部を覆う透明カバー214とで形成される灯室216を有する。灯室216には、光を車両前方方向に照射する灯具ユニット10が収納されている。灯具ユニット10の一部には、当該灯具ユニット10の揺動中心となるピボット機構218aを有するランプブラケット218が形成されている。ランプブラケット218はランプボディ212の内壁面に立設されたボディブラケット220とネジ等の締結部材によって接続されている。したがって、灯具ユニット10は、灯室216内の所定位置に固定されると共に、ピボット機構218aを中心として、例えば前傾姿勢または後傾姿勢等に姿勢変化可能となる。
また、灯具ユニット10の下面には、曲線道路走行時等に進行方向を照らす曲線道路用配光可変前照灯(Adaptive Front-lighing System:AFS)を構成するためのスイブルアクチュエータ222の回転軸222aが固定されている。スイブルアクチュエータ222は、車両側から提供される操舵量のデータや、ナビゲーションシステムから提供される走行道路の形状データ、前走車と自車の相対位置の関係等に基づいて灯具ユニット10をピボット機構218aを中心に進行方向に旋回(スイブル:swivel)させる。その結果、灯具ユニット10の照射範囲が車両の正面ではなく曲線道路のカーブの先に向き、運転者の前方視界を向上させる。スイブルアクチュエータ222は、例えばステッピングモータで構成することができる。なお、スイブル角度が固定値の場合には、ソレノイドなども利用可能である。
スイブルアクチュエータ222は、ユニットブラケット224に固定されている。ユニットブラケット224には、ランプボディ212の外部に配置されたレベリングアクチュエータ226が接続されている。レベリングアクチュエータ226は、例えばロッド226aを矢印M,N方向に伸縮させるモータなどで構成されている。ロッド226aが矢印M方向に伸長した場合、灯具ユニット10はピボット機構218aを中心として後傾姿勢になるように揺動する。逆にロッド226aが矢印N方向に短縮した場合、灯具ユニット10はピボット機構218aを中心として前傾姿勢になるように揺動する。灯具ユニット10が後傾姿勢になると、光軸を上方に向けるレベリング調整ができる。また、灯具ユニット10が前傾姿勢になると、光軸を下方に向けるレベリング調整ができる。このようにレベリング調整をすることで、車両姿勢に応じた光軸調整ができる。その結果、車両用前照灯210による前方照射の到達距離を最適な距離に調整することができる。
なお、このレベリング調整は、車両走行中の車両姿勢に応じて実行することもできる。例えば、車両が走行中に加速する場合は後傾姿勢となり、逆に減速する場合は前傾姿勢となる。したがって、車両用前照灯210の照射方向も車両の姿勢状態に対応して上下に変動して、前方照射距離が長くなったり短くなったりする。そこで、車両姿勢に基づき灯具ユニット10のレベリング調整をリアルタイムで実行することで、走行中でも前方照射の到達距離を最適に調整できる。これを「オートレベリング」と称することもある。
灯室216の内壁面、例えば、灯具ユニット10の下方位置には、灯具ユニット10の点消灯制御や配光パターンの形成制御を実行する照射制御部228が配置されている。図1の場合、車両用前照灯210Rを制御するための照射制御部228Rが配置されている。この照射制御部228Rは、スイブルアクチュエータ222、レベリングアクチュエータ226等の制御も実行する。
灯具ユニット10は、エーミング調整機構を備えることができる。例えば、レベリングアクチュエータ226のロッド226aとユニットブラケット224の接続部分に、エーミング調整時の揺動中心となるエーミングピボット機構を配置する。また、ボディブラケット220とランプブラケット218の接続部分に、車両前後方向に進退する一対のエーミング調整ネジを車幅方向に間隔をあけて配置する。例えば2本のエーミング調整ネジを前方に進出させれば、灯具ユニット10はエーミングピボット機構を中心に前傾姿勢となり光軸が下方に調整される。同様に2本のエーミング調整ネジを後方に引き戻せば、灯具ユニット10はエーミングピボット機構を中心に後傾姿勢となり光軸が上方に調整される。また、車幅方向左側のエーミング調整ネジを前方に進出させれば、灯具ユニット10はエーミングピボット機構を中心に右旋回姿勢となり右方向に光軸が調整される。また、車幅方向右側のエーミング調整ネジを前方に進出させれば、灯具ユニット10はエーミングピボット機構を中心に左旋回姿勢となり左方向に光軸が調整される。このエーミング調整は、車両出荷時や車検時、車両用前照灯210の交換時に行われる。そして、車両用前照灯210が設計上定められた規定の姿勢に調整され、この姿勢を基準に本実施形態の配光パターンの形成制御が行われる。
灯具ユニット10は、回転シェード12を含むシェード機構18と、光源としてのバルブ14と、リフレクタ16を内壁に支持する灯具ハウジング17と、投影レンズ20とを備える。バルブ14は、例えば、白熱球やハロゲンランプ、放電球、LEDなどが使用可能である。本実施の形態では、バルブ14をハロゲンランプで構成する例を示す。リフレクタ16は、バルブ14から放射される光を反射する。そして、バルブ14からの光およびリフレクタ16で反射した光は、その一部がシェード機構18を構成する回転シェード12を経て投影レンズ20へと導かれる。
図2は、回転シェード12の概略斜視図である。回転シェード12は、回転軸12aを中心に回転可能な円筒形状の部材である。また、回転シェード12は軸方向に一部が切り欠かれた切欠部22を有し、当該切欠部22以外の外周面12b上に板状のシェードプレート24を複数保持している。回転シェード12は、その回転角度に応じて投影レンズ20の後方焦点を含む後方焦点面の位置に切欠部22または、複数のシェードプレート24のいずれか1つを移動させることができる。そして、回転シェード12の回転角度に対応して光軸O上に位置するシェードプレート24の稜線部の形状に従う配光パターンが形成される。例えば、複数のシェードプレート24のいずれか1つを光軸O上に移動させてバルブ14から照射された光の一部を遮光することで、ロービーム用配光パターンまたは一部にロービーム用配光パターンの特徴を含む配光パターンを形成する。また、光軸O上に切欠部22を移動させてバルブ14から照射された光を非遮光とすることでハイビーム用配光パターンを形成する。
回転シェード12は、シェードモータ(図示せず)により回転可能であり、該シェードモータの回転量を制御することで、回転所望の配光パターンを形成するためのシェードプレート24または切欠部22を光軸O上に移動させることができる。なお、回転シェード12の外周面12bの切欠部22を省略して、回転シェード12に、遮光機能だけを持たせてもよい。そして、ハイビーム用配光パターンを形成する場合は、例えばソレノイド等を駆動して回転シェード12を光軸Oの位置から退避させるようにする。このような構成にすることで、例えば、回転シェード12を回転させるシェードモータがフェールしてもロービーム用配光パターンまたはそれに類似する配光パターンで固定される。つまり、回転シェード12がハイビーム用配光パターンの形成姿勢で固定されてしまうことを確実に回避してフェールセーフ機能を実現できる。
投影レンズ20は、車両前後方向に延びる光軸O上に配置され、バルブ14は投影レンズ20の後方焦点面よりも後方側に配置される。投影レンズ20は、前方側表面が凸面で後方側表面が平面の平凸非球面レンズからなり、後方焦点面上に形成される光源像を反転像として車両用前照灯210前方の仮想鉛直スクリーン上に投影する。
図3(a)〜(f)は、本実施の形態に係る車両用前照灯210により照射可能な配光パターンを示す図である。図3(a)〜(f)は、車両用前照灯210の前方25mの位置に配置された仮想鉛直スクリーン上に形成される配光パターンを示している。本実施の形態においては、図3(a)〜(f)に示す6つの配光パターンが形成可能である。なお、図3(a)〜(f)に示す配光パターンは、車幅方向の左右に配置された車両用前照灯210でそれぞれ形成した配光パターンを重畳させることで形成された合成配光パターンである。
図3(a)は、ロービーム用配光パターンを示している。このロービーム用配光パターンは、交通法規が左側通行の地域において、市街地走行などの走行で対向車や歩行者にグレアを与えないように配慮された配光パターンである。
図3(b)は、ハイビーム用配光パターンを示している。このハイビーム用配光パターンは、運転者の前方視界を最大まで確保できる配光パターンである。
図3(c)は、交通法規が左側通行の地域で使用される左片ハイ用配光パターンを示している。この左片ハイ用配光パターンは、左側の車両用前照灯210で形成する左片ハイ用配光パターンと右側の車両用前照灯210で形成するロービーム用配光パターンとの合成によって形成される。このような左片ハイ用配光パターンは、自車線側に前走車や歩行者が存在せず、対向車線側に対向車や歩行者が存在する場合に適した配光であり、運転者の前方視認性を向上させつつ、対向車や対向車線の歩行者にグレアを与えないように配慮した配光パターンである。
図3(d)は、交通法規が左側通行の地域で使用される右片ハイ用配光パターンを示している。この右片ハイ用配光パターンは、右側の車両用前照灯210で形成する右片ハイ用配光パターンと左側の車両用前照灯210で形成するロービーム用配光パターンとの合成によって形成される。右片ハイ用配光パターンは、自車線側に前走車や歩行者が存在し、対向車線側に対向車や歩行者が存在しない場合に適した配光であり、運転者の前方視認性を向上させつつ、前走車や自車線の歩行者にグレアを与えないように配慮した配光パターンである。
図3(e)は、ロービーム用配光パターンの変形パターンであり、仮想鉛直スクリーン上の鉛直線Vと水平線Hの交点近傍に対する光の照射を抑制した配光パターンである。図3(e)に示す配光パターンは、「V配光パターン」と称されるものである。このV配光パターンは、例えば、左側の車両用前照灯210により図3(a)に示すロービーム用配光パターンを形成する。一方、右側の車両用前照灯210により、交通法規が右側通行の地域で使用するロービーム用配光パターン、すなわち、図3(a)に示す配光パターンを鉛直線Vに関して線対称にした配光パターンを形成する。この2つ異なる配光パターンを重畳することにより、遠方の先行車や対向車が存在する可能性のある鉛直線Vと水平線Hの交点近傍に対する光の照射を抑制したV配光パターンを形成することができる。このV配光パターンは、遠方の前走車に対するグレアを抑制しつつ、自車線側や対向車線側の路肩の障害物などを運転者に認識させ易くできる配光パターンであるといえる。
図3(f)は、図3(c)に示す左片ハイ用配光パターンおよび図3(d)に示す右片ハイ用配光パターンの変形パターンであり、「スプリット配光パターン」と称されるものである。このスプリット配光パターンは、自車線および対向車線への光の照射を抑制しつつ、自車線および対向車線より外側の視界を良好に確保できる配光パターンである。このようなスプリット配光パターンは例えば以下のように形成される。左側の車両用前照灯210を左方向に所定の角度スイブルさせた状態で、図3(c)に示す左片ハイ用配光パターンを形成する。一方、右側の車両用前照灯210を右方向に所定の角度スイブルさせた状態で、図3(d)に示す右片ハイ用配光パターンを形成する。この左片ハイ用配光パターンと右片ハイ用配光パターンを重畳させることにより、図3(f)に示すようなスプリット配光パターンを形成できる。
以上のように、本実施の形態の車両用前照灯210によれば、ロービーム用配光パターン、ハイビーム用配光パターン、左片ハイ用配光パターン、右片ハイ用配光パターン、V配光パターン、スプリット配光パターンの6種類の配光パターンを形成することができる。
図4は、本発明の実施の形態に係る配光制御システム100を説明するための機能ブロック図である。配光制御システム100は、上述した車両用前照灯210と、車両用前照灯210を制御する車両制御部302と、ライトスイッチ304と、カメラ306と、ステアリングセンサ308と、車速センサ310と、ナビゲーションシステム312とを備える。
車両用前照灯210の照射制御部228は、車両に搭載された車両制御部302の指示に従って電源回路230の制御を行い、バルブ14の点灯制御を実行する。また、照射制御部228は、車両制御部302からの指示に従い、レベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221を制御する。
例えば、照射制御部228は、カーブ走行や右左折走行などの旋回時にスイブルアクチュエータ222を制御して、灯具ユニット10の光軸をこれから進行する方向に向ける。また、照射制御部228は、加減速時の車両姿勢の前傾、後傾に応じてレベリングアクチュエータ226を制御して、灯具ユニット10の光軸を車両上下方向について調整し、前方照射の到達距離を最適な距離に調整する。また、照射制御部228は、車両制御部302からの配光パターンの指示に応じて、レベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221を制御する。
配光制御システム100は、運転者によるライトスイッチ304の操作に応じて手動で配光パターンを切り替え可能である。以下、このような手動で配光パターンを制御するモードを、適宜「手動モード」と称する。例えば運転者がロービーム用配光パターンを選択した場合、車両制御部302は照射制御部228にロービーム用配光パターンを形成するよう指示を出す。指示を受けた照射制御部228は、ロービーム用配光パターンが形成されるようレベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221を制御する。
また、配光制御システム100は、ライトスイッチ304の操作によらず、車両周囲の状況を各種センサで検出して、車両周囲状況に最適な配光パターンを形成可能である。以下、このように配光パターンを制御するモードを、適宜「ADB(Adaptive Driving Beam)モード」と称する。
例えば、自車の前方に前走車が検出された場合、車両制御部302は、前走車へのグレアを防止するべきであると判断して、例えばロービーム用配光パターンが形成されるよう照射制御部228に指示を出す。また、前走車が存在しないことが検出できた場合、車両制御部302は、運転者の視界を向上させるべきであると判断して、例えばハイビーム用配光パターンが形成されるよう照射制御部228に指示を出す。
このように前走車を検出するために、車両制御部302には対象物の認識手段として例えばステレオカメラなどのカメラ306が接続されている。カメラ306で撮像された画像データは、車両制御部302に送信され、車両制御部302が信号処理をして画像解析を行い、撮像範囲内における前走車を検知する。そして、車両制御部302は、取得した前走車の情報に基づいて最適な配光パターンを選択し、その選択した配光パターンを形成するように照射制御部228に指示を出す。なお、前走車を検出する手段は適宜変更可能であり、カメラ306に代えて、例えばミリ波レーダや赤外線レーダなど他の検出手段を用いてもよい。また、それらを組み合わせてもよい。
また、車両制御部302は、車両に通常搭載されているステアリングセンサ308、車速センサ310などからの情報も取得可能であり、車両の走行状態や走行姿勢に応じて形成する配光パターンを選択したり、光軸の方向を変化させて簡易的に配光パターンを変化させることができる。例えば車両制御部302は、ステアリングセンサ308からの情報に基づき車両が旋回していると判定した場合、旋回方向の視界を向上させるような配光パターンが形成されるよう回転シェード12を回転制御する。また、シェード12の回転状態は変化させずに、スイブルアクチュエータ222を制御して灯具ユニット10の光軸を旋回方向に向けて視界を向上させるようにしてもよい。
この他、車両制御部302は、ナビゲーションシステム312から道路の形状情報や形態情報、道路標識の設置情報などを取得することもできる。これらの情報を事前に取得することにより、レベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221等を制御して、走行道路に適した配光パターンをスムーズに形成することもできる。
ところで、ADBモードにおいては、カメラ306からの画像データに基づいて行う前走車の検出精度が重要である。この検出精度が低いと前走車の検出漏れが生じて前走車にグレアを与えてしまったり、誤検出を繰り返して配光パターンが頻繁に切り替わることにより運転者に違和感を与えてしまうおそれがある。前走車の検出精度を高めるためには、夜間でも鮮明な画像を撮像することができる超高感度のカメラを用いる方法が考えられるが、このような超高感度のカメラを用いた場合、コストが高くなってしまう。そこで、本実施の形態においては、感度がそれ程高くない安価なカメラを用いた場合であっても前走車にグレアを与えるのを防止できる手法を提案する。
図5は、本実施の形態に係る配光制御システム100における配光パターンの切替制御を説明するためのフローチャートである。以下に説明する制御は、ADBモードにおける配光パターンの切替制御である。図5に示したフローチャートによる配光パターンの切替制御は、所定の時間毎に繰返し実行される。
まず、カメラ306により車両前方が撮像される(S10)。カメラ306は、所定の撮像周期Tp(秒)で撮像するように構成されている。撮像された画像データは、車両制御部302に送られる。車両制御部302は、カメラ306から提供される画像データに対して画像解析を行い、撮像範囲内における前走車を検知する(S12)。そして、車両制御部302は、取得した前走車の情報に基づいて最適な配光パターンを図3(a)〜(f)に示した6種類の配光パターンの中から選択する(S14)。例えば、対向車線および自車線に車両が存在すれば、図3(a)に示すロービーム用配光パターンを選択する。また例えば、自車に前方に車両が存在しなければ、図3(b)に示すハイビーム用配光パターンを選択する。また例えば、自車線側に先行車が存在せず、対向車線側に対向車が存在すれば、図3(c)に示す左片ハイ用配光パターンを選択する。車両制御部302は、選択した配光パターンの情報を車両用前照灯210の照射制御部228に出力する。
照射制御部228は、車両制御部302によって選択された配光パターンの照射範囲が、現在照射している配光パターンの照射範囲よりも広くなるか否か判定する(S16)。例えば、現在照射している配光パターンがロービーム用配光パターンで、選択された配光パターンがハイビーム用配光パターンであれば、照射範囲は広くなっていると判定する。
選択された配光パターンの照射範囲が現在の配光パターンよりも広くなっている場合(S16のY)、照射制御部228は、今回選択された配光パターンが所定の規定回数(N回)連続して選択されているか否か判定する(S18)。なお、照射制御部228は、同じ配光パターンが連続した回数をカウントするために、カウンタを備えている。このカウンタは、同一配光パターンの連続が途切れた場合にはリセットされる。規定回数Nは、2以上の値に設定される。
連続してN回同じ配光パターンが選択されている場合(S18のY)、照射制御部228は、現在の配光パターンから選択された配光パターンに切り替わるようレベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221等を制御する(S20)。同じ配光パターンが連続した回数がまだN回未満である場合(S18のN)、制御フローはS10に戻り、撮像周期Tp秒後にカメラ306による撮像が行われる。S10〜S16を繰り返し、同じ配光パターンが連続した回数がN回に達すれば、S20に進み、配光パターンの切替が行われる。
一方、S16において選択された配光パターンの照射範囲が現在の配光パターンよりも狭くなっている場合、または現在の配光パターンと同じ場合(S16のN)、照射制御部228は直ぐに選択された配光パターンが照射されるようにレベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221を制御する(S22)。なお、選択された配光パターンが現在の配光パターンと同じ場合には、現在の制御が維持される。
次に、以上のような配光制御システム100の制御をタイミングチャートを用いて具体的に説明する。
図6(a)〜(e)は、照射範囲が拡大する配光パターンへ切り替える場合の制御を説明するためのタイミングチャートである。図6(a)は実際の前走車の状態を示し、図6(b)はカメラ306の撮像タイミングを示し、図6(c)は車両制御部302による前走車の検知結果を示し、図6(d)は車両制御部302による配光パターンの選択を示し、図6(e)は照射制御部228による車両用前照灯210の制御を示している。ここでは、初めは前走車が存在するためロービーム用配光パターンを照射していたが、途中で前走車がいなくなったため、ハイビーム用配光パターンに切り替える状況を想定して説明する。また、ここでは規定回数N=4として説明する。
図6(b)に示すように、カメラ306は、所定の撮像周期Tp秒ごとに車両前方を撮像している。カメラ306が時刻t1〜t8のそれぞれにおいて車両前方を撮像すると、それぞれの撮像時刻ごとに車両制御部302はカメラ306からの画像データを基に前走車を検知し、最適な配光パターンを選択する。
図6に示すように、時刻t1、t2のときには自車の前方に前走車が存在している。従って、時刻t1、t2においては、車両制御部302は前走車が存在すると検知しており、ロービーム用配光パターンを選択している。時刻t1、t2においては、その時点で照射している配光パターンと同じ配光パターンが選択されているため、ロービーム用配光パターンがそのまま維持されている。
ここで、図6(a)に示すように時刻t2とt3の間の時刻t2’において、前走車がいなくなったとする。車両制御部302は、時刻t2’の直後の時刻t3に撮像された撮像データを基に、図6(c)に示すように、時刻t3において前走車がいなくなったと検知している。前走車がいなくなったため、車両制御部302は、図6(d)に示すように時刻t3においてハイビーム用配光パターンを選択している。この選択された配光パターンの情報は、照射制御部228に送られる。
車両制御部302から選択された配光パターンの情報を受け取ると、照射制御部228は、その選択された配光パターンの照射範囲が現在照射している配光パターンの照射範囲よりも広くなるか否か判定する。時刻t3における実際の照射パターンはロービーム用配光パターンであり、車両制御部302により選択されたのはハイビーム用配光パターンであるので、照射範囲が広くなる配光パターンへの切替である。但し、時刻t3の時点では、まだ1回だけハイビーム用配光パターンが選択されただけであるので、図5に示すフローチャートのS18に従って直ぐに配光パターンの切替は行わず、再度時刻t4において、新たに撮像された画像データに基づいて前走車の検知および配光パターンの選択が行われる。ここでは、時刻t4においても前走車は検出されず、ハイビーム用配光パターンが選択されている。しかし、時刻t4の時点では、まだ2回連続してハイビーム用配光パターンが選択されただけであるので、照射制御部228はまだ配光パターンの切替は行わない。3回連続してハイビーム用配光パターンが選択された時刻t5においても同様である。本実施の形態では、規定回数N=4に設定しているので、4回連続してハイビーム用配光パターンが選択された時刻t6において、ロービーム用配光パターンからハイビーム用配光パターンへの切替が行われている。つまり、車両制御部302によって4回連続して前走車が検知されなかった場合に、照射制御部228は前走車がいなくなったと確定し、配光パターンの切替を行っているのである。
従って、本実施の形態においては、車両制御部302により前走車がいなくなったと初めて検知された時刻t3から、照射制御部228により前走車がいなくなったと確定して配光パターンを切り替えるまでに、Tp×3秒を必要とする。Tp×3秒の間に一度でも前走車がいると検知されてロービーム用配光パターンが選択されれば、その時点で同じ配光パターンが連続した回数をカウントするカウンタがリセットされるため、時刻t6においては配光パターンの切替は行われない。本実施の形態においては、車両制御部302により前走車の検知結果に変化が生じてから、その変化を確定して配光パターンの切替を開始するまでの時間を「検出時間ΔT」と称する。検出時間ΔTは、ΔT=Tp×(N−1)と表すことができる。
このように、本実施の形態に係る配光制御システム100は、照射範囲が拡大する配光パターンへの切替が行われる場合には、照射制御部228により前走車の検知結果に変化が生じても直ぐに新しい配光パターンに切り替えず、検出時間ΔT経過後に新しい配光パターンに切り替えるように構成されている。例えばロービーム用配光パターンからハイビーム用配光パターンに切り替わる場合など、照射範囲が拡大する配光パターンに切り替わる場合、仮に車両制御部302による前走車の検知が誤っていたとすると、前走車にグレアを与えてしまうおそれがある。従って本実施の形態においては、配光パターンの切替速度よりも前走車の検出精度を優先して、検出時間ΔTの間繰り返して前走車の検知を行う構成とした。長時間にわたって前走車の検知を行うことにより、1回だけの検知で前走車の有無を確定する場合よりも検出精度を高めることができるので、前走車にグレアを与えるのを抑制することができる。
図7(a)〜(e)は、照射範囲が縮小する配光パターンへ切り替える場合の制御を説明するためのタイミングチャートである。図7(a)は実際の前走車の状態を示し、図7(b)はカメラ306の撮像タイミングを示し、図7(c)は車両制御部302による前走車の検知結果を示し、図7(d)は車両制御部302による配光パターンの選択を示し、図7(e)は照射制御部228による車両用前照灯210の制御を示している。ここでは、初めは前走車が存在しないためハイビーム用配光パターンを照射していたが、途中で前走車が現れたため、ロービーム用配光パターンに切り替える状況を想定して説明する。
図7に示すように、時刻t1、t2のときには自車の前方に前走車が存在していない。従って、時刻t1、t2においては、車両制御部302は前走車が存在しないと検知しており、ハイビーム用配光パターンを選択している。時刻t1、t2においては、その時点で照射している配光パターンと同じ配光パターンが選択されているため、ハイビーム用配光パターンがそのまま維持されている。
ここで、図7(a)に示すように時刻t2とt3の間の時刻t2’において、前走車が現れたとする。車両制御部302は、時刻t2’の直後の時刻t3に撮像された撮像データを基に、図7(c)に示すように時刻t3において前走車が現れたと検知している。前走車が現れたため、車両制御部302は、図7(d)に示すように時刻t3においてロービーム用配光パターンを選択している。この選択された配光パターンの情報は、照射制御部228に送られる。
車両制御部302から選択された配光パターンの情報を受け取ると、照射制御部228は、その選択された配光パターンの照射範囲が現在照射している配光パターンの照射範囲よりも広くなるか否か判定する。時刻t3における実際の照射パターンはハイビーム用配光パターンであり、車両制御部302により選択されたのはロービーム用配光パターンであるので、照射範囲が狭くなる配光パターンへの切替である。従って、図5に示すフローチャートにしめされるように、時刻t3において直ぐに配光パターンの切替を行っている。
このように、本実施の形態に係る配光制御システム100は、照射範囲が縮小する配光パターンへの切替が行われる場合には、照射制御部228により前走車の検出結果に変化が生じたと検知されてから直ぐに新しい配光パターンに切り替わるよう構成されている。すなわち、検出時間ΔT=0秒で配光パターンの切替をおこなっている。例えばハイビーム用配光パターンからロービーム用配光パターンに切り替わる場合など、照射範囲が縮小する配光パターンに切り替わる場合、仮に車両制御部302による前走車の検知結果が誤っていたとしても、前走車にグレアを与えてしまうことはない。従って本実施の形態においては、前走車の検出精度よりも早期に最適な配光パターンに切り替わることを優先して、検出時間ΔT=0秒で配光パターンの切替を行っている。このように早期に最適な配光パターンへの切替を行うことにより、前走車にグレアを与えてしまうのを抑制することが可能となる。
なお、ここでは照射範囲が縮小する配光パターンへの切替が行われる場合の検出時間ΔT=0秒としたが、検出時間ΔTは0秒に限られない。例えば、前走車の検出精度を高めつつ早期に配光パターンの切替を行うことができるように、検出時間ΔT=Tpと設定してもよい。
図8は、照射範囲が拡大する場合の各配光パターン間の検出時間を示す図である。図8においては、ロービーム用配光パターンから、ハイビーム用配光パターン、V配光パターン、右片ハイ用配光パターン、スプリット配光パターン、左片ハイ配光パターンに切り替える場合の検出時間を、それぞれΔT1、ΔT2、ΔT3、ΔT4、ΔT5としている。また、V配光パターンからハイビーム用配光パターン、スプリット配光パターン、右片ハイ配光パターン、左片ハイ配光パターンに切り替える場合の検出時間をそれぞれΔT6、ΔT13、ΔT14、ΔT15としている。また、右片ハイ配光パターンから、ハイビーム用配光パターン、スプリット配光パターンに切り替える場合の検出時間をそれぞれΔT7、ΔT8としている。また、左片ハイ配光パターンから、ハイビーム用配光パターン、スプリット配光パターンに切り替える場合の検出時間をそれぞれΔT9、ΔT10としている。また、スプリット配光パターンからハイビーム用配光パターンに切り替える場合の検出時間をΔT11としている。また、左片ハイ配光パターンと右片ハイ配光パターンとを切り替える場合の検出時間をΔT12としている。なお、この左片ハイ配光パターンと右片ハイ配光パターンとの切替は、照射範囲の面積はほとんど変わらない。
ここで、検出時間ΔT1〜ΔT11およびΔT13〜Δ15は、例えば1〜2秒程度に設定されている。検出時間ΔT1〜ΔT11およびΔT13〜Δ15は、同一であってもよいし、異なっていてもよい。最適な検出時間ΔTは、実験やシミュレーションにより適宜設定すればよい。また、右片ハイ用配光パターンと左片ハイ用配光パターンとを切り替える際の検出時間ΔT12は、グレアを防止するために検出時間ΔT1〜ΔT11およびΔT13〜Δ15よりも短い時間、例えば0〜0.5秒に設定されている。
図9は、照射範囲が縮小する場合の各配光パターン間の検出時間を示す図である。図9においては、ハイビーム用配光パターンから、ロービーム用配光パターン、V配光パターン、右片ハイ用配光パターン、スプリット配光パターン、左片ハイ用配光パターンに切り替える場合の検出時間を、それぞれΔT16、ΔT17、ΔT18、ΔT19、ΔT20としている。また、スプリット配光パターンから、右片ハイ用配光パターン、左片ハイ用配光パターン、ロービーム用配光パターン、V配光パターンに切り替える場合の検出時間を、それぞれΔT21、ΔT22、ΔT23、ΔT27としている。また、V配光パターンから、ロービーム用配光パターンに切り替える場合の検出時間をΔT24としている。また、右片ハイ配光パターンから、ロービーム用配光パターン、V配光パターンに切り替える場合の検出時間をそれぞれΔT25、ΔT28としている。また、左片ハイ用配光パターンからロービーム用配光パターン、V配光パターンに切り替える場合の検出時間をそれぞれΔT26、ΔT29としている。
ここで、検出時間ΔT16〜ΔT29は、図8に示した検出時間ΔT1〜ΔT11およびΔT13〜Δ15よりも短い時間に設定されている。例えば、検出時間ΔT16〜ΔT29は、0〜0.5秒程度に設定されている。検出時間ΔT16〜ΔT29は、同一であってもよいし、異なっていてもよい。
以上、説明したように、本実施の形態に係る配光制御システム100においては、照射範囲がそれまでよりも広くなる配光パターンに切り替える場合には、照射範囲が狭くなる配光パターンに切り替える場合よりも前走車の検出時間ΔTを長く設定している。これにより、照射範囲が広くなる配光パターンに切り替える場合の前走車の検出精度を高めることが可能となり、前走車にグレアを与えるのを抑制することができる。また、照射範囲が縮小する配光パターンに切り替える場合には前走車の検出時間ΔTを短く設定することにより、素早く最適な配光パターンに切り替えることができる。
本実施の形態に係る配光制御システム100においては、高価な超高感度カメラ等を用いずとも前走車の検出精度を向上できるので、安価な構成により前走車にグレアを与えるのを防止できる配光制御システムを実現できる。
ところで、前走車の検出精度は、車両の様々な走行状態によって変化する。従って、車両制御部302および照射制御部228は、車両の走行状態に応じて検出時間ΔTを可変してもよい。
例えば、雨天時には、晴天時と比較して前走車の検知が難しくなるおそれがある。そこで、雨を検出するレインセンサ311を車両制御部302に接続し、雨天時にはそれ以外の天候時よりも検出時間ΔTを長くしてもよい。例えば、ロービーム用配光パターンからハイビーム用配光パターンに切り替える場合、雨天時以外の検出時間が1秒に設定されていたとすれば、雨天時には検出時間を3秒に変更する。これにより、雨天時の前走車の検出精度を高めることができる。
また、曲線路を走行している場合には、前走車の位置が刻々と変化するため、配光パターンが頻繁に切り替えられる可能性がある。配光パターンが頻繁に切り替わると運転者が違和感を感じるため好ましくない。
そこで、車両制御部302および照射制御部228は、ステアリングセンサ308、車速センサ310、ナビゲーションシステム312等からの情報に基づいて車両が曲線路を走行しているか否かを判定し、曲線路を走行している場合にはそれ以外の場合よりも検出時間ΔTを長くしてもよい。例えば、ロービーム用配光パターンからハイビーム用配光パターンに切り替える場合、直線路での検出時間ΔTが1秒に設定されていたとすれば、曲線路での検出時間ΔTを5秒に変更する。これにより、曲線路において配光パターンが頻繁に切り替わるのが防止され、運転者が違和感を感じるのを抑制できる。
上述したように、本実施の形態に係る配光制御システム100においては、照射範囲がそれまでよりも広くなる配光パターンに切り替える場合には、照射範囲が狭くなる配光パターンに切り替える場合よりも前走車の検出時間ΔTを長く設定している。しかしながら、このような構成にした場合、前走車の検出精度が向上して前走車にグレアを与えるおそれは低減できるものの、例えば前方に車両が存在しなくなってからハイビーム用配光パターンに切り替わるまでに時間がかかることになる。
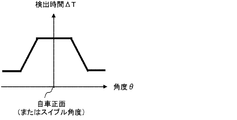
そこで、車両制御部302および照射制御部228は、前走車の水平方向の位置に応じて検出時間ΔTを可変してもよい。図10は、前走車の水平方向の位置に応じた検出時間ΔTの可変制御を説明するための図である。図10は、直線路を走行している場合の制御を示している。図10において、縦軸は検出時間ΔTを表し、横軸は自車から車両前方を透視的に見た場合の前走車の水平方向の位置(自車から自車正面に向けて延ばした直線と、自車と前走車とを結んだ直線とのなす角度θ)を表している。図10において、縦軸と横軸の交点は、自車正面を表している。
ここでは、図10に示すように前走車が自車正面の領域に位置している場合は検出時間ΔTを長く設定し、前走車の位置が自車正面から左右に外れるに従って検出時間ΔTが短くなるように設定している。自車正面に前走車が位置している場合、その前走車の検知に失敗して例えばハイビーム用配光パターンを照射すると、前走車に多大なグレアを与えてしまう。従って、自車正面に位置する前走車に対しては、より慎重に検知を行うべく検出時間ΔTを長く設定している。一方、自車正面から左右に外れた領域に前走車が位置している場合、仮に前走車の検知に失敗したとしても、その前走車にそれ程大きなグレアを与えることはない。従って、検出精度よりも素早い配光パターンの切替による視認性向上を優先し、前走車の位置が自車正面から左右に外れるに従って検出時間ΔTが小さくなるように設定している。
上述したように、図10は、直線路を走行している場合の制御を示している。スイブル機能を備えている車両の場合、前走車がスイブル角度周辺に位置している場合は検出時間ΔTを長く設定し、前走車の位置がスイブル角度から外れるに従って検出時間ΔTが短くなるように設定すればよい。
また、車両制御部302および照射制御部228は、カメラ306や車間距離センサからの情報に基づいて前走車までの距離を検出し、前走車までの距離が所定の閾値距離よりも大きい場合には、それ以外の場合よりも前走車の検出時間ΔTを長くしてもよい。前走車の検出精度は、自車から前走車までの距離に応じて変化する。すなわち、自車から遠い前走車ほど検出精度は低下する。そこで、所定の閾値距離よりも前走車が遠い場合には、閾値距離未満の場合よりも検出時間ΔTを長くすることにより、自車から遠方の前走車に対する検出精度を高めつつ、自車近傍における前走車の有無の変化に対して素早く配光パターンを切り替えることができる。
ところで、本実施の形態に係る配光制御システム100は、車両周囲の状況に応じて最適な配光パターンを形成するADBモードの他に、運転者がライトスイッチ304を操作することにより手動の配光パターンの切替が可能である。本実施の形態においては、ADBモードで配光パターンの制御が行われている際に、運転者がライトスイッチ304を操作して手動でそれまでとは異なる配光パターンに切り替えようとした場合、車両制御部302および照射制御部228は、配光パターンが徐々に切り替わるようにレベリングアクチュエータ226、スイブルアクチュエータ222、シェードモータ221を制御する。これにより、配光パターンが急に変わることが回避されるため、配光パターン変化時に伴う運転者の違和感を抑制することができる。
図11(a)〜(f)は、曲線路において視認性を向上するための配光パターンの制御を説明するための図である。図11(a)〜(c)は、図5に示す制御フローに従って制御を行った場合の配光パターンの変化を示す図である。ここでは、左にカーブする曲線路を走行中に対向車Cが遠方より近づいてくる場合を想定して説明を行う。
図11(a)に示すように、対向車Cが遠方に存在する場合、対向車Cは自車から見て正面より左側に位置しているので、車両制御部302および照射制御部228は右片ハイ用配光パターンR−Hiを選択して照射している。そして対向車Cが近づいてきて図11(b)に示すように自車正面付近にくると、車両制御部302および照射制御部228はロービーム用配光パターンLoを選択して照射している。対向車Cがさらに近づいてきて自車とすれ違う直前になると、図11(c)に示すように対向車Cが自車から見て正面より右側にくる。この場合、自車正面から見て左側には車両が存在しないので、左片ハイ用配光パターンを照射することが望ましいが、ロービーム用配光パターンからハイビーム用配光パターンへの切替は、照射範囲が広くなる切替なので、検出時間ΔTが長く設定されており、切替が遅れてしまう。その結果、曲線路の遠方領域の視認性が損なわれてしまうおそれがある。
図11(d)〜(f)は、改良された曲線路における配光パターンの切替制御を示す図である。図11(d)〜(e)までの制御は、図11(a)〜(b)までの制御と同様である。ここで、本制御においては、曲線路において左右どちらか一方の片ハイ用配光パターンからロービーム配光パターンに切り替えられた場合には、ロービーム用配光パターンから他方の片ハイ用配光パターンへの切替の際に、検出時間ΔTを通常よりも短くする。このような制御を行うことにより、図11(f)に示すように対向車Cが自車正面より右側に位置するようになった場合、素早くロービーム用配光パターンから左片ハイ用配光パターンL−Hiへ切り替えることが可能となり、曲線路の遠方領域の視認性を向上することができる。
以上、実施の形態をもとに本発明を説明した。これらの実施形態は例示であり、各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。