JP5590983B2 - 医療器具保持装置 - Google Patents
医療器具保持装置 Download PDFInfo
- Publication number
- JP5590983B2 JP5590983B2 JP2010136501A JP2010136501A JP5590983B2 JP 5590983 B2 JP5590983 B2 JP 5590983B2 JP 2010136501 A JP2010136501 A JP 2010136501A JP 2010136501 A JP2010136501 A JP 2010136501A JP 5590983 B2 JP5590983 B2 JP 5590983B2
- Authority
- JP
- Japan
- Prior art keywords
- endoscope
- holding
- arm
- medical instrument
- adapter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Description
そして、上記構成では、入力手段の操作時には、医療機器の把持部表面の少なくとも一部を覆うように保持部に設けられたレバーを術者が把持部に対し、近接する方向に動かす操作をすることにより、制動手段を解除状態に切り替え操作する。これにより、保持装置に保持された内視鏡を三次元的に移動させる際の術者のハンドリング性を向上するようにしたものである。
そして、上記構成では、医療機器の把持部を覆う形でブレーキ解除のレバーを設けたため、医療機器の把持操作がそのままブレーキ解除動作になり操作性が良い。また、ブレーキ解除のレバーを滅菌可能なアダプタに設けたため、レバーを滅菌ドレープで覆って使う必要がなく、操作性が良い。さらに、アーム連結体に入力手段としての電気スイッチを備えているので、洗浄・滅菌によるスイッチの劣化が無い。その結果、スイッチを使い捨てにする必要がないため、ランニングコストを下げることができる。
そして、上記構成では、洗浄滅菌を行わないアーム連結体にスイッチを設け、レバーから少なくともレバーの移動に連動して移動する第1の連動部材と、第1の連動部材の移動方向とは異なる方向に移動し、入力手段を操作する第2の連動部材とからなるレバー連動手段を介してスイッチを操作する構成としたため、洗浄・滅菌によるスイッチの劣化が無い。その結果、スイッチを使い捨てにする必要がないため、ランニングコストを下げることができる。したがって、医療器具を把持する姿勢や把持のしかたに左右されず、医療器具の移動、固定操作を、常に良好な状態で行え、医療器具を保持する保持部の洗浄、滅菌を容易にしたものである。
そして、上記構成では、レバーの操作時には、レバーの移動に連動して第1の連動部材が移動し、この第1の連動部材のテーパー面と第2の連動部材が当接することで、第2の連動部材は、第1の連動部材の移動方向とは異なる方向に移動するようにしたものである。
そして、上記構成では、入力手段の操作時には、内視鏡の把持部表面の少なくとも一部を覆うように保持部に設けられたレバーを術者が把持部に対し、近接する方向に動かす操作をすることにより、制動手段を解除状態に切り替え操作する。これにより、保持装置に保持された内視鏡を三次元的に移動させる際の術者のハンドリング性を向上するようにしたものである。
そして、上記構成では、入力手段の操作時には、超音波プローブの把持部表面の少なくとも一部を覆うように保持部に設けられたレバーを術者が把持部に対し、近接する方向に動かす操作をすることにより、制動手段を解除状態に切り替え操作する。これにより、保持装置に保持された超音波プローブを三次元的に移動させる際の術者のハンドリング性を向上するようにしたものである。
(構成)
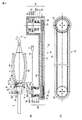
図1および図2は、本発明の第1の実施の形態を示す。図1において符号1は医療器具保持装置としての内視鏡保持装置、符号2は患者を処置、観察するための医療器具としての内視鏡である。内視鏡2は、体腔内に挿入される挿入部2aと、術者が把持するための把持部2bとを備えるとともに、図示しないCCD等を内蔵し、体腔内の画像を図示しないモニター等に表示する装置である。
次に、上記構成の作用について説明する。本実施の形態の内視鏡保持装置1の使用時には、まず、図1に示すように関節部4dから関節部4f近傍までを滅菌ドレープ7を用いて覆う。
そこで、上記構成のものにあっては次の効果を奏する。すなわち、本実施の形態の内視鏡保持装置1では、内視鏡2の把持部2bを覆う形でブレーキ解除の2つのレバー17、18を設けたため、内視鏡2の把持操作がそのままブレーキ解除動作になり操作性が良い。また、ブレーキ解除の2つのレバー17、18を滅菌可能なアダプタ3に設けたため、2つのレバー17、18を滅菌ドレープ7で覆って使う必要がなく、操作性が良い。したがって、内視鏡2を把持する姿勢や把持のしかたに左右されず、内視鏡2の移動、固定操作を、常に良好な状態で行え、内視鏡2を保持するアダプタ3の洗浄、滅菌が容易な医療器具保持装置を提供することができる。
(構成)
図3は、本発明の第2の実施の形態を示す。本実施の形態は、第1の実施の形態(図1および図2参照)の内視鏡保持装置1の構成を次の通り変更した本実施の形態の内視鏡保持装置21を設けた変形例である。
次に、上記構成の作用について説明する。本実施の形態の内視鏡保持装置21の使用時には、まず、図3に示すように関節部23dから他の図示しない関節部までを滅菌ドレープ7を用いて覆う。その後、予め滅菌したアダプタ22をリング11の雌ねじ部11aを雄ねじ部24bにねじ込むことにより、アダプタ22とアーム連結体23を連結する。この連結において、アダプタ22の第2のスライダ34がアーム連結体23の第3のスライダ35のフランジ35aに当接する。
そこで、本実施の形態では第1実施形態の効果に加え、洗浄滅菌を行わないアーム連結体23に押しボタンスイッチ38を設け、レバー31、32からレバー連動手段を介して押しボタンスイッチ38を操作する構成としたため、洗浄・滅菌によるスイッチ38の劣化が無い。その結果、押しボタンスイッチ38を使い捨てにする必要がないため、ランニングコストを下げることができる。
(構成)
図4(A),(B)は、本発明の第3の実施の形態を示す。本実施の形態は第1の実施の形態(図1および図2参照)の内視鏡保持装置1の変形例である。本実施の形態では、医療器具を保持するアダプタの近傍(先端部)の関節部を小型軽量化するために、この関節部の固定用ブレーキをこの関節部内や近傍ではなく関節部よりも遠位の場所、例えばアームの基端側に配置する。さらに、アダプタの近傍の関節部の回転をアームの基端側に配置したブレーキまで伝達する伝達手段を設けている。尚、上記以外の第1の実施形態と同じ部分については同一番号を付し説明を割愛する。
次に、上記構成の作用について説明する。本実施の形態の内視鏡保持装置41に予めセットされた内視鏡2を動かしたい時には、前記レバー17、18越しに内視鏡2の把持部2bを握る。すると、前記レバー17、18は、押しボタンスイッチ13、14を押す。このとき、押しボタンスイッチ13、14からの出力信号による情報はケーブル15、コネクタ16を介して図示しないブレーキ制御部へ伝達される。
そこで、本実施の形態では第1実施形態の効果に加え、関節部42dの固定用の電磁ブレーキ55を医療器具である内視鏡2から離れた位置、例えばアーム42aの基端部側に配置し、関節部42dの回転を伝達手段57によりブレーキ55まで伝達するようにしている。そのため、医療器具である内視鏡2の周辺の関節部42dを小型軽量化でき、手術の妨げにならないよう構成できる。
(構成)
図5(A),(B)は、本発明の第4の実施の形態を示す。本実施の形態は第3の実施の形態(図4参照)の内視鏡保持装置41の変形例である。第3の実施の形態の内視鏡保持装置41では、プーリーとベルトの組合せからなる伝達手段を示したが、本実施の形態では、これに代えて歯車同士による伝達手段に変更したものである。なお、これ以外の部分は第3の実施の形態の内視鏡保持装置41と同一構成になっており、第3の実施の形態と同一部分には同一の符号を付してここではその説明を省略する。
次に、上記構成の作用について説明する。本実施の形態の内視鏡保持装置61に予めセットされた内視鏡2を動かしたい時には、前記レバー17、18越しに内視鏡2の把持部2bを握る。すると、前記レバー17、18は押しボタンスイッチ13、14を押す。このとき、押しボタンスイッチ13、14からの出力信号による情報はケーブル15、コネクタ16を介して図示しないブレーキ制御部へ伝達される。
そこで、上記構成のものにあっては第3実施形態の効果に加え、伝達手段69を歯車機構で構成したため、ベルトの伸びなどによる伝達の劣化を防止することができ、耐久性を高めることができる。
次に、本出願の他の特徴的な技術事項を下記の通り付記する。
記
(付記項1) 把持部を備えた医療器具を着脱可能に保持する保持部と、前記保持部と接続され、複数のアーム部を関節部により連結し屈曲可能とするアーム連結体と、前記関節部に設けられ、前記関節部の固定/解除状態を切り替える制動手段と、前記医療機器の把持部表面の少なくとも一部を覆うように前記保持部に設けられ、術者の操作により前記医療機器の把持部に対し近接・離間する方向に移動可能なレバーと、前記レバーを前記医療器具の把持部に近接する方向に動かすことで、前記制動手段を解除状態にする入力手段とを備えたことを特徴とする医療器具保持装置。
特開2002−191545開示の保持装置は、内視鏡を保持する保持部の握り部にスイッチを、関節部内に固定/解除可能なブレーキを設け、スイッチを押すことにより内視鏡を移動可能にし、スイッチから手を離すと内視鏡が固定されるものである。
特開2005−125056の開示の医療用具支持装置は、内視鏡保持部付近の関節部内に固定/解除可能なブレーキを設けたもので、内視鏡付近での姿勢変更が可能なものである。
特開2002−191545、特開2005−125056のように、腹腔鏡手術用の内視鏡は、内視鏡保持装置の保持部に取り付けて使用される場合が一般的である。そして内視鏡保持装置には内視鏡の固定状態を電磁的にロックまたはフリーに切り替える電気的なスイッチが備えちれている。しかしながら、ボタン式の切り替えスイッチでは、術者が内視鏡を把持する姿勢、把持のしかたによっては、切り替えスイッチが押しにくい位置となり、操作性が好ましくなかった。
特開2005−125056のように、関節部の固定/解除の制動を行うブレーキは固定する関節部の内部や近傍に配置されるのが一般的である。しかしながら、内視鏡を保持する保持部(先端部)付近の関節部の内部や近傍にブレーキを設けてしまうと、内視鏡周りが大きくなり手術の妨げになる。また、カウンターバランス方式の保持装置の場合、先端部が重くなるとバランスをとるためのカウンターウェイトが大型化するといった問題もあり好ましくなかった。
Claims (6)
- 把持部を備えた医療器具を着脱可能に保持する保持部と、
前記保持部と接続され、複数のアーム部を関節部により連結し、屈曲可能とするアーム連結体と、
前記関節部に設けられ、前記関節部の固定状態と解除状態とを切り替える制動手段と、
前記医療機器の把持部表面の少なくとも一部を覆うように前記保持部に設けられ、術者の操作により前記医療機器の把持部に対し、接離する方向に移動可能なレバーと、
前記レバーを前記医療器具の把持部に近接する方向に動かすことで、前記制動手段を解除状態に切り替え操作する入力手段と
を備えたことを特徴とする医療器具保持装置。 - 前記保持部は、洗浄・滅菌可能で、
前記アーム連結体は、前記入力手段としての電気スイッチを備え、
かつ、前記アーム連結体と前記保持部とを着脱させる着脱部と、
前記アーム連結体を覆うカバー手段と、
前記レバーの移動に連動し、前記入力手段を操作するレバー連動手段と
を備えたことを特徴とする請求項1に記載の医療器具保持装置。 - 前記レバー連動手段は、少なくとも前記レバーの移動に連動して移動する第1の連動部材と、
前記第1の連動部材の移動に連動して前記第1の連動部材の移動方向とは異なる方向に移動し、前記入力手段を操作する第2の連動部材とから構成されることを特徴とする請求項2に記載の医療器具保持装置。 - 前記第1の連動部材は、テーパー面を備え、前記第2の連動部材は、前記テーパー面と当接することで前記第1の連動部材の移動方向とは異なる方向に移動することを特徴とする請求項3に記載の医療用保持装置。
- 前記医療器具は、内視鏡であることを特徴とする請求項1〜4のいずれかに記載の医療器具保持装置。
- 前記医療器具は、超音波プローブであることを特徴とする請求項1〜4のいずれかに記載の医療器具保持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010136501A JP5590983B2 (ja) | 2010-06-15 | 2010-06-15 | 医療器具保持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010136501A JP5590983B2 (ja) | 2010-06-15 | 2010-06-15 | 医療器具保持装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012000199A JP2012000199A (ja) | 2012-01-05 |
| JP5590983B2 true JP5590983B2 (ja) | 2014-09-17 |
Family
ID=45532892
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010136501A Active JP5590983B2 (ja) | 2010-06-15 | 2010-06-15 | 医療器具保持装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5590983B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6005950B2 (ja) | 2011-08-04 | 2016-10-12 | オリンパス株式会社 | 手術支援装置及びその制御方法 |
| JP6081061B2 (ja) | 2011-08-04 | 2017-02-15 | オリンパス株式会社 | 手術支援装置 |
| JP5953058B2 (ja) | 2011-08-04 | 2016-07-13 | オリンパス株式会社 | 手術支援装置およびその着脱方法 |
| CN103717169B (zh) | 2011-08-04 | 2016-11-16 | 奥林巴斯株式会社 | 医疗用机械手及其控制方法 |
| WO2013018908A1 (ja) | 2011-08-04 | 2013-02-07 | オリンパス株式会社 | 医療用マニピュレータおよび手術支援装置 |
| JP6009840B2 (ja) | 2011-08-04 | 2016-10-19 | オリンパス株式会社 | 医療機器 |
| JP6021484B2 (ja) | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | 医療用マニピュレータ |
| JP5936914B2 (ja) | 2011-08-04 | 2016-06-22 | オリンパス株式会社 | 操作入力装置およびこれを備えるマニピュレータシステム |
| JP5931497B2 (ja) | 2011-08-04 | 2016-06-08 | オリンパス株式会社 | 手術支援装置およびその組立方法 |
| KR101454262B1 (ko) * | 2013-12-17 | 2014-10-27 | 주식회사 고영테크놀러지 | 의료용 도구 고정 기구 |
| JP5878567B2 (ja) * | 2014-01-23 | 2016-03-08 | 上銀科技股▲分▼有限公司 | ブレーキ機能付き支持アーム |
| EP3119314B1 (en) | 2014-03-17 | 2020-05-06 | Intuitive Surgical Operations, Inc. | System and method for breakaway clutching in an articulated arm |
| DE102015101018A1 (de) * | 2015-01-23 | 2016-07-28 | MAQUET GmbH | Vorrichtung zum Halten und Bewegen eines Laparoskops während einer Operation |
| JP6669865B2 (ja) | 2016-07-19 | 2020-03-18 | オリンパス株式会社 | 医療デバイス保持装置 |
| JP2018202032A (ja) * | 2017-06-08 | 2018-12-27 | 株式会社メディカロイド | 医療器具の遠隔操作装置 |
| JP6757340B2 (ja) * | 2018-01-25 | 2020-09-16 | 株式会社メディカロイド | 医療器具の遠隔操作装置 |
| WO2021131028A1 (ja) * | 2019-12-27 | 2021-07-01 | リバーフィールド株式会社 | ホルダ |
| WO2021234853A1 (ja) * | 2020-05-20 | 2021-11-25 | リバーフィールド株式会社 | ホルダ |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2613801B2 (ja) * | 1989-03-13 | 1997-05-28 | 株式会社ジェイ・エム・エス | 手術用器具支持装置 |
| JP2002191545A (ja) * | 1993-12-22 | 2002-07-09 | Olympus Optical Co Ltd | 手術器具保持装置 |
| JP4309683B2 (ja) * | 2002-03-25 | 2009-08-05 | オリンパス株式会社 | 超音波観察システム |
| JP2005087528A (ja) * | 2003-09-18 | 2005-04-07 | Olympus Corp | 手術用顕微鏡の操作装置 |
| JP4559093B2 (ja) * | 2003-10-03 | 2010-10-06 | オリンパス株式会社 | 医療用具支持装置 |
| JP4546065B2 (ja) * | 2003-11-10 | 2010-09-15 | オリンパス株式会社 | 内視鏡保持装置及び内視鏡保持システム |
| DE102004004602B4 (de) * | 2004-01-29 | 2022-09-08 | Carl Zeiss Meditec Ag | Stativvorrichtung für ein medizinisch-optisches Instrument |
| JP4458907B2 (ja) * | 2004-04-16 | 2010-04-28 | 三鷹光器株式会社 | 手術顕微鏡用のマウススイッチ |
| JP2006061376A (ja) * | 2004-08-26 | 2006-03-09 | Olympus Corp | 医療器具システム |
| JP2006218563A (ja) * | 2005-02-09 | 2006-08-24 | National Univ Corp Shizuoka Univ | ロボット機構 |
-
2010
- 2010-06-15 JP JP2010136501A patent/JP5590983B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012000199A (ja) | 2012-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5590983B2 (ja) | 医療器具保持装置 | |
| JP5608486B2 (ja) | 手術用動力伝達アダプタ及び医療用マニピュレータシステム | |
| US11291515B2 (en) | Device for automatically inserting and manipulating a medical tool into and within a bodily lumen | |
| KR102569960B1 (ko) | 수술 로봇 시스템을 위한 기구 장치 조작기 | |
| JP5980764B2 (ja) | 術具 | |
| JP4472365B2 (ja) | 医療器具保持装置 | |
| US20160235490A1 (en) | Modular interface for a robotic system | |
| US20100268249A1 (en) | Surgical system with medical manipulator and sterile barrier | |
| JP6049585B2 (ja) | 術具 | |
| KR20190086402A (ko) | 로봇 수술 시스템용 멸균 어댑터 어셈블리 | |
| JPH0219128A (ja) | 内視鏡の制御ハンドル用汚染防止装置 | |
| CN102458275A (zh) | 用于组织的内窥镜切除或去除的设备 | |
| KR20190086400A (ko) | 멸균 어댑터 어셈블리를 액추에이터 어셈블리에 고정하기 위한 로봇 수술 시스템용 락킹 메커니즘 | |
| WO2010121107A1 (en) | Surgical system with medical manipulator and sterile barrier | |
| JPH07328024A (ja) | 医療用マニピュレータ装置 | |
| KR102443635B1 (ko) | 컴퓨터 보조 원격 조작 수술 시스템 및 방법 | |
| JP2011104275A (ja) | 医療器具保持装置 | |
| CN117257469B (zh) | 一种内镜机器人诊室 | |
| KR102554176B1 (ko) | 오염방지 기능이 부가된 바늘 삽입용 엔드이펙터 | |
| JPH0559730B2 (ja) | ||
| WO2023226174A1 (zh) | 一种手术机器人装置及其操作方法 | |
| JPH07328014A (ja) | 手術装置 | |
| IT202000002554A1 (it) | Stazione di comando per chirurgia robotica, campo operatorio sterile, sistema di chirurgia robotica e metodo | |
| IL292274A (en) | A system for inserting and automatically maneuvering a medical tool in the body cavity |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140715 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140729 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5590983 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |