JP5581572B2 - Elevator control device - Google Patents
Elevator control device Download PDFInfo
- Publication number
- JP5581572B2 JP5581572B2 JP2008146069A JP2008146069A JP5581572B2 JP 5581572 B2 JP5581572 B2 JP 5581572B2 JP 2008146069 A JP2008146069 A JP 2008146069A JP 2008146069 A JP2008146069 A JP 2008146069A JP 5581572 B2 JP5581572 B2 JP 5581572B2
- Authority
- JP
- Japan
- Prior art keywords
- elevator
- long
- control
- emergency operation
- emergency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Description
この発明は、長周期地震動や強風の発生によって実施される長周期振動時管制運転と火災の検知とが重複した際に、エレベータを適切に制御するエレベータの制御装置に関するものである。 The present invention relates to an elevator control device that appropriately controls an elevator when a long-period vibration control operation performed by generation of long-period ground motion or strong wind overlaps with a fire detection.
下記非特許文献1には、通常の地震が発生した時のエレベータの管制運転動作、即ち地震時管制運転動作が記載されている。かかる地震時管制運転動作は、S波地震感知器で「低gal」が検知された(非特許文献1における低感知器が動作した)場合に、早期にかごを最寄り階停止させることにより、乗客の安全を確保し、エレベータ機器の損傷を防止することを第一の目的としている。
なお、消防活動中の場合は、S波地震感知器を手動或いは自動リセットすることにより、地震時管制運転によって運転が休止されたエレベータを運転可能な状態にできる。即ち、S波地震感知器をリセットすることによって、消防活動に必要な非常運転を可能な限り実施できるようにしている。
In addition, during a fire fighting activity, the elevator that has been stopped by the control operation during an earthquake can be made operable by manually or automatically resetting the S-wave earthquake detector. That is, by resetting the S-wave earthquake detector, emergency operation necessary for fire fighting activities can be performed as much as possible.
一方、近年では、通常の地震感知器(例えば、上記S波地震感知器)では感知できないような建物のゆっくりとした揺れを検知し、エレベータを管制運転動作に移行させるものもある。
例えば、従来技術として、下記特許文献1に記載されたものがある。このエレベータでは、建物の水平方向の変位量とその揺れの継続時間とを検出し、所定の条件を満たす場合にエレベータを管制運転に移行させている。そして、この管制運転では、例えば、エレベータを所定の非共振階に避難させ、サービスを一部制限したり、サービス自体を一時停止したりしている。
On the other hand, in recent years, there are some which detect a slow shaking of a building that cannot be detected by a normal earthquake detector (for example, the above-described S-wave earthquake detector) and shift an elevator to a control operation.
For example, as a prior art, there is one described in
特許文献1記載のものであれば、長周期地震動や強風の発生によって建物が揺れた場合であっても、エレベータを適切に制御して、エレベータ機器類の損傷等を防止することが可能となる。しかし、このエレベータでは、上記管制運転中に火災が発生した場合の考慮がなされていない。即ち、消防活動を行う消防夫が、上記管制運転中に消防活動のための非常運転を実施する場合には、十分な効果を得ることができなかった。
If it is a thing of
なお、非特許文献1に記載されている地震時管制運転は、短時間で建物の揺れが収束する通常の地震動(S波)に対して定められたものである。このため、建物の揺れが数分間継続する長周期地震動や、数時間継続するような強風が発生した場合に対して適用することはできなかった。即ち、非常運転を開始するために長周期振動検知装置をリセットしても、建物の揺れが継続しているために再動作してしまい、円滑な消防活動が困難になっていた。
In addition, the control operation at the time of earthquake described in the
この発明は、上述のような課題を解決するためになされたもので、その目的は、長周期地震動の発生等によって建物の揺れが長時間に渡る場合でも、消防夫がエレベータを利用して消防活動を適切に行うことができるエレベータの制御装置を提供することである。 The present invention has been made to solve the above problems, and an object, even if over a prolonged shaking of the building by generation of long-period ground motion, fireman is using the elevator To provide an elevator control device capable of appropriately performing fire fighting activities.
この発明に係るエレベータの制御装置は、長周期地震動や強風によって建物に発生する長周期振動を検知可能な長周期振動検知装置と、長周期振動検知装置の検知結果に基づいて、長周期振動時管制運転を制御する管制運転制御手段と、運転を切替える切替スイッチとを備え、切替スイッチは、スプリングバックである投入位置とスプリングバックでない複数の投入位置とを有し、スプリングバックでない複数の投入位置のうちの1つは、長周期振動時管制運転よりも消防活動に必要な非常運転を優先する投入位置であり、スプリングバックでない複数の投入位置のうちの他の1つは、非常運転を優先しない投入位置であり、スプリングバックである投入位置は、非常運転を継続するための点検運転を実施する投入位置である。
The elevator control device according to the present invention includes a long-period vibration detecting device capable of detecting long-period vibration generated in a building due to long-period ground motion or strong wind, and a long-period vibration detecting device based on a detection result of the long-period vibration detecting device. A control operation control means for controlling the control operation and a changeover switch for switching the operation , the changeover switch having a closing position that is a spring back and a plurality of closing positions that are not springback, and a plurality of closing positions that are not springback one among a emergency operation you prioritize loading position required for firefighting than during control operation long-period vibration, another one of the plurality of input positions that are not spring back, the emergency operation A closing position that is not prioritized and is a springback is a closing position for carrying out an inspection operation for continuing the emergency operation .
この発明によれば、長周期地震動の発生等によって建物の揺れが長時間に渡る場合でも、消防夫がエレベータを利用して消防活動を適切に行うことができるようになる。
According to the present invention, even if over a prolonged shaking of the building by generation of long-period ground motion, fireman will be able to properly carry out the firefighting uses an elevator.
この発明をより詳細に説明するため、添付の図面に従ってこれを説明する。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化ないし省略する。 In order to explain the present invention in more detail, it will be described with reference to the accompanying drawings. In addition, in each figure, the same code | symbol is attached | subjected to the part which is the same or it corresponds, The duplication description is simplified or abbreviate | omitted suitably.
実施の形態1.
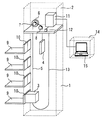
図1はエレベータの全体構成を示す図、図2はこの発明の実施の形態1における非常運転優先装置を示す図である。図1において、1は建物に設けられたエレベータの昇降路、2は昇降路1の上方に設けられたエレベータの機械室、3は昇降路1内を昇降するかご、4は昇降路1内をかご3とは互いに逆方向に昇降する釣合い重り、5はかご3と釣合い重り4とを釣瓶式に懸架するメインロープである。このメインロープ5は、機械室2に設置された巻上機6の駆動綱車7とそらせ車8とにその一部が巻き掛けられており、駆動綱車7の回動に連動して移動する。即ち、巻上機6によって駆動綱車7が駆動されることにより、かご3が昇降路1内を昇降する。
なお、9はエレベータの各サービス階(図1においては、建物の1階から4階)に設けられたエレベータ乗場である。乗場9から昇降路1へと通じる各出入口には、乗場ドア装置10が設置されている。
FIG. 1 is a diagram showing an overall configuration of an elevator, and FIG. 2 is a diagram showing an emergency operation priority apparatus according to
In addition, 9 is an elevator hall provided on each service floor of the elevator (in FIG. 1, the first floor to the fourth floor of the building). A
11は制御盤、12は長周期振動検知装置であり、共に機械室2に設置されている。制御盤11は、巻上機6の制御等、エレベータ全体の運行制御を司る。また、制御盤11は、かご3に設置されている表示装置やアナウンス装置等の各種機器類(何れも図示せず)を制御するため、かご3と制御ケーブル13によって接続されている。
長周期振動検知装置12は、長周期地震動や強風による建物の揺れを検知するために備えられたものである。即ち、この長周期振動検知装置12は、通常の地震感知器(例えば、S波地震感知器)では検知することができないような建物のゆっくりとした所定の揺れ(長周期振動)を、複数のレベルで検知できるように構成されている。
The long-period
14は建物内或いは建物に近接した施設内に備えられた防災センターである。この防災センター14には、制御盤11に接続された監視装置15が設置されており、エレベータの状態を常時表示している。また、防災センター14内或いはかご3内には、図2に示すような非常運転優先装置16(図1において図示せず)が設けられている。この非常運転優先装置16は、長周期地震動や強風等によって建物がゆっくり揺れた場合に対応した所定の管制運転、即ち長周期振動時管制運転(休止状態も含む)の動作中に建物内で火災が発生した場合に、上記長周期振動時管制運転を解除して、消防活動に必要な非常運転を優先して実施するための装置である。
上記非常運転優先装置16は、例えば、図2に示すような切替スイッチによって構成される。ここで、図2に示す「優先」は、長周期振動時管制運転よりも非常運転を優先することを、「非優先」は非常運転を優先しないことを、「点検」は後述の点検運転を実施することを意味している。なお、詳細については後述する。そして、この非常運転優先装置16は、火災発生時、消防活動を行う消防夫によって操作される。
The emergency
次に、図3乃至図5に基づき、エレベータの制御装置の具体的な機能及び動作について説明する。図3はこの発明の実施の形態1におけるエレベータの制御装置を示す構成図、図4は図3に示す制御装置によって実施される長周期振動時管制運転動作を示すフローチャート、図5は図3に示す制御装置によって実施される非常運転動作を示すフローチャートである。
図3において、上記制御盤11には、管制運転制御手段17、動作判定手段18、優先判定手段19、非常運転制御手段20が備えられている。
Next, specific functions and operations of the elevator control device will be described with reference to FIGS. FIG. 3 is a block diagram showing an elevator control apparatus according to
In FIG. 3, the
管制運転制御手段17は、長周期振動検知装置12の検知結果(例えば、レベル別の入力信号)に基づいて、上記長周期振動時管制運転を制御する機能を有する。具体的に、管制運転制御手段17は、長周期地震動や強風等による建物の所定の揺れが検知されることにより、かご3(及び、釣合い重り4)を所定の非共振階まで走行させ、運転を休止させるための制御を行う。即ち、この動作により、メインロープ5や制御ケーブル13等の長尺物が建物の揺れと共振して、昇降路1内の各種設置機器(図示せず)に接触したり引っ掛かったりすることを防止する。
The control operation control means 17 has a function of controlling the control operation during the long period vibration based on the detection result (for example, the input signal for each level) of the long period
以下、図4に基づき、長周期振動時管制運転の具体的な動作について説明する。なお、以下においては、一例として、長周期振動検知装置12に2段階の検知レベル(Lv1、Lv2)が設定されている場合について説明する。
Hereinafter, based on FIG. 4, the specific operation | movement of long period vibration control operation is demonstrated. In the following, as an example, a case where two levels of detection levels (Lv1, Lv2) are set in the long-period
エレベータの平常運転時(S101)、管制運転制御手段17では、長周期振動検知装置12によってLv1の揺れが検知されたか否かを常時判定している(S102)。そして、Lv1の揺れが検知されなければ平常運転を継続させる。一方、S102においてLv1の揺れが検知されると、乗場9やかご3に設置された各表示装置、及び監視装置15等の外部機器に、Lv1の揺れが検知された旨の表示を行う(S103)。
During normal operation of the elevator (S101), the control operation control means 17 always determines whether or not the Lv1 swing has been detected by the long-period vibration detector 12 (S102). Then, the normal operation is continued if the swing of Lv1 is not detected. On the other hand, when the swing of Lv1 is detected in S102, the display indicating that the swing of Lv1 is detected is displayed on each display device installed in the
また、S102においてLv1の揺れが検知された後、Lv1の揺れが未検知になれば、所定時間経過後(例えば、10分後)に上記外部機器等の表示を消し、エレベータを平常運転に復帰させる(S104、S105)。ここで、Lv1の揺れが未検知になっても所定時間経過するまで外部機器等の表示を消さないのは、検知レベルが低いためにLv1の揺れが再度検知される可能性が高く、その際に外部機器等の表示が点滅してしまうことを防止するためである。 In addition, after the Lv1 swing is detected in S102, if the Lv1 swing is not detected, the display of the external device is turned off after a predetermined time has elapsed (for example, after 10 minutes), and the elevator is returned to normal operation. (S104, S105). Here, even if the Lv1 fluctuation is not detected, the display of the external device or the like is not erased until a predetermined time elapses because the detection level is low and the Lv1 fluctuation is likely to be detected again. This is to prevent the display of an external device or the like from blinking.
また、S104において継続してLv1を検知している場合は、Lv1が未検知になるまで、Lv2の揺れが検知されたか否かを判定する(S106)。そして、S106においてLv2の揺れが検知されると、先ず、以後のエレベータの使用を禁止するため、S107において、既に登録されている乗場呼びやかご呼びをキャンセルする。次に、現在のエレベータの状態に応じた対応を行うため、S108において、エレベータが走行中であるか否かを判定する。 If Lv1 is continuously detected in S104, it is determined whether or not Lv2 swing has been detected until Lv1 is not detected (S106). When the swing of Lv2 is detected in S106, first, in order to prohibit the use of the subsequent elevator, in S107, the already registered hall call and car call are canceled. Next, in order to perform a response according to the current state of the elevator, in S108, it is determined whether or not the elevator is traveling.
S108においてエレベータが走行中であると判定された場合は、先ず、現在のエレベータの進行方向に、所定の非共振階が存在するか否かを判定する(S109)。ここで、進行方向に非共振階が存在する場合、管制運転制御手段17は、エレベータをその非共振階まで直行運転させ、着床後に乗客を降車させて、エレベータの運転を休止させる(S110、S111)。 If it is determined in S108 that the elevator is traveling, it is first determined whether or not a predetermined non-resonant floor exists in the current traveling direction of the elevator (S109). Here, when there is a non-resonant floor in the traveling direction, the control operation control means 17 causes the elevator to go straight to the non-resonant floor, gets off the passenger after landing, and stops the operation of the elevator (S110, S111).
一方、S109において走行方向に非共振階が存在しない場合、管制運転制御手段17は、先ず、かご3を最寄り階に着床させ、乗客を降車させる(S112、S113)。また、S113における乗客の降車が所定時間(例えば、1分)以内に完了したか否かを判定し(S114)、乗客の降車が所定時間内に完了していると判定されれば、走行速度を通常運転の速度よりも低下させて、エレベータを非共振階へ走行させる(S115)。なお、S115の上記動作は、エレベータの停止時間が短ければ、メインロープ5や制御ケーブル13等の振幅が、昇降路1内の各種設置機器に接触する程には成長しないとの考えに基づくものである。そして、エレベータが非共振階に着床した後、エレベータの運転が休止される(S116)。
また、S114において、乗客の降車が所定時間内に完了していないと判定されれば、現在の停止階においてエレベータの運転を休止させる(S117)。これは、エレベータの停止時間が長ければ、メインロープ5や制御ケーブル13等が建物の揺れと共振して、昇降路1内の各種設置機器に接触している可能性が高くなるためである。
On the other hand, if there is no non-resonant floor in the traveling direction in S109, the control operation control means 17 first makes the
Further, if it is determined in S114 that the passengers have not finished getting off within the predetermined time, the operation of the elevator is suspended on the current stop floor (S117). This is because if the elevator stop time is long, there is a high possibility that the
また、S108においてエレベータが停止中であると判定された場合は、次に、現在の停止階が所定の非共振階であるか否かを判定する(S118)。そして、現在の停止階が非共振階である場合はS111に、非共振階でない場合はS113に進み、上記と同様の動作を行う。
以上が、長周期振動時管制運転での具体的な動作である。
If it is determined in S108 that the elevator is stopped, it is next determined whether or not the current stop floor is a predetermined non-resonant floor (S118). If the current stop floor is a non-resonance floor, the process proceeds to S111. If the current stop floor is not a non-resonance floor, the process proceeds to S113, and the same operation as described above is performed.
The above is the specific operation in the long-period vibration control operation.
一方、制御盤11内の上記動作判定手段18は、エレベータが長周期振動時管制運転の動作中であるか否かを判定する機能を有する。具体的に、動作判定手段18は、管制運転制御手段17(或いは、長周期振動検知装置12)からの信号に基づいて上記判定を行う。また、優先判定手段19は、非常運転優先装置16からの入力信号に基づき、何れの運転が優先されているかを判定する。即ち、優先判定手段19は、非常運転優先装置16が「優先」、「非優先」、「点検」の何れに投入されているのかを検出する。
そして、非常運転制御手段20は、上記動作判定手段18及び優先判定手段19の各判定結果に基づいて、消防活動に必要な非常運転を適切に制御する。具体的に、非常運転制御手段20は、非常運転優先装置16によって長周期振動時管制運転が解除された場合に、所定の条件下、エレベータを戸閉状態で最上階から最下階まで自動走行させて所定の点検運転を実施することにより、消防夫の安全を確保しつつ、可能な限り非常運転を継続させる。
On the other hand, the operation determination means 18 in the
Then, the emergency
以下、図5に基づき、非常運転の具体的な動作について説明する。
エレベータの平常運転時に火災が検知され、消防夫が消火活動を実施すべく非常運転を開始するための所定の操作を行うと(S201)、非常運転制御手段20は、先ず、動作判定手段18の判定結果に基づいて、長周期地震動等による建物の揺れを現在検知中であるか否か、即ち長周期振動時管制運転が動作中であるか否かを判定する(S202)。S202において、建物の揺れが未検知である場合、非常運転制御手段20は、消防夫等の操作に基づいて、非常運転を制御する(S203)。
Hereinafter, based on FIG. 5, the specific operation of the emergency operation will be described.
When a fire is detected during normal operation of the elevator and the firefighter performs a predetermined operation for starting an emergency operation to perform a fire extinguishing activity (S201), the emergency operation control means 20 first of the operation determination means 18 Based on the determination result, it is determined whether or not a building shake due to a long-period ground motion or the like is currently being detected, that is, whether or not a long-period vibration control operation is in operation (S202). When the shaking of the building is not detected in S202, the emergency operation control means 20 controls the emergency operation based on the operation of the firefighter or the like (S203).
一方、S202において長周期振動時管制運転の動作中である場合、非常運転制御手段20は、非常運転優先装置16が「優先」側に投入されているか否かを判定する(S204)。ここで、非常運転優先装置16が「優先」側に投入されていない場合、「優先」側に投入されるまで、長周期振動時管制運転による運転休止を継続させ、エレベータをそのまま待機させる(S205)。
On the other hand, if the long-period vibration control operation is being performed in S202, the emergency operation control means 20 determines whether or not the emergency
消防夫等の操作によって非常運転優先装置16が「優先」側に投入されると、非常運転制御手段20は、長周期振動時管制運転による運転休止を解除し、先ず、エレベータを戸開待機させる(S206)。また、S206において運転休止が解除されると、非常運転制御手段20は、現在のエレベータの停止階が、所定の共振階であるか否かを判定する。なお、上記共振階とは、長周期地震動等によって生じる建物の揺れに、エレベータが影響を受け易い停止階、例えば、長周期地震動等によって建物がゆっくり揺れた場合に、メインロープ5等のエレベータ長尺物が、建物の揺れに共振し易い停止階のことを意味する。(なお、非共振階は、上記共振階ではない停止階、或いは、長周期地震動等によって生じる建物の揺れに、エレベータが影響を受け難い特定の停止階のことを意味する。)
そして、エレベータが共振階に停止していないと判定された場合は、非常運転を継続させ、消防夫の操作に基づいてエレベータを運行させる。
When the emergency
And when it determines with the elevator not having stopped on the resonance floor, emergency operation is continued and an elevator is operated based on operation of a firefighter.
一方、エレベータが共振階に停止している場合、非常運転制御手段20は、次に、エレベータがその共振階に所定時間以上停止しているか否かを判定する(S207)。なお、エレベータが共振階に所定時間以上停止していない場合、メインロープ5や制御ケーブル13等の振幅は、昇降路1内の各種設置機器に接触する程に成長している可能性は著しく低い。このため、かかる場合は、消防夫の操作に基づいてエレベータを運行し、非常運転を継続させる(S208)。
On the other hand, when the elevator is stopped at the resonance floor, the emergency operation control means 20 next determines whether or not the elevator is stopped at the resonance floor for a predetermined time or more (S207). In addition, when the elevator has not stopped at the resonance floor for a predetermined time or more, the possibility that the amplitude of the
一方、S207において所定時間以上停止していると判定された場合、メインロープ5や制御ケーブル13等は、建物の揺れと共振して、昇降路1内の各種設置機器に接触している可能性が高い。このため、非常運転制御手段20は、非常運転を継続させる前に必ず点検運転を実施させ、かかる点検運転で異常が発見されなかった場合に、エレベータの非常運転の継続を許可するための制御を行う。
On the other hand, when it is determined in S207 that the vehicle has stopped for a predetermined time or longer, the
具体的に、非常運転制御手段20は、S207においてエレベータが共振階に所定時間以上停止していると判定されると、先ず、乗場9やかご3に設置された各表示装置、及び監視装置15等の外部機器を使用して、消防夫や外部に警告を報知し、その状態のままエレベータを待機させる(S209)。
Specifically, when it is determined in S207 that the elevator has stopped at the resonance floor for a predetermined time or longer, the emergency operation control means 20 first displays each display device installed in the
次に、非常運転制御手段20は、非常運転優先装置16が「点検」側に投入されているか否かを判定する(S210)。ここで、非常運転優先装置16が「点検」側に投入されていない場合は、S209に戻って、警告の報知及び運転待機を継続させる。一方、消防夫等の操作によって非常運転優先装置16が「点検」側に投入されると、非常運転制御手段20は、非常運転を継続させるための点検運転を開始する。具体的には、先ず、エレベータが戸開中であれば自動で戸閉動作を行う(S211)。そして、戸閉状態を維持したまま、エレベータを最上階から最下階まで自動走行させる所定の点検運転を行い、この点検運転完了後、自動走行を開始した運転待機階にエレベータを停止させる(S212)。
Next, the emergency operation control means 20 determines whether or not the emergency
上記点検運転では、走行中の異常音の有無や、機器故障を検知する異常検知装置の検知結果、着床不良の有無等に基づいて、エレベータの異常が検出される(S213)。そして、点検運転中や点検運転後にエレベータの異常が検出された場合、その後のエレベータの使用は禁止される。即ち、その後の非常運転の継続が阻止され、エレベータは運転休止状態となる(S214)。一方、S213においてエレベータが正常であると判定されると、自動戸開した後、エレベータは運転待機状態となり、消防夫による非常運転の操作を待つ(S215)。なお、S215の後、非常運転制御手段20は、S207に戻って上記動作を繰り返す。 In the inspection operation, the abnormality of the elevator is detected based on the presence or absence of abnormal noise during traveling, the detection result of the abnormality detection device that detects equipment failure, the presence or absence of poor landing, and the like (S213). If an abnormality in the elevator is detected during or after the inspection operation, subsequent use of the elevator is prohibited. That is, the continuation of the subsequent emergency operation is prevented, and the elevator enters an operation stop state (S214). On the other hand, if it is determined in S213 that the elevator is normal, after the automatic door is opened, the elevator enters an operation standby state and waits for an emergency operation by the firefighter (S215). After S215, the emergency operation control means 20 returns to S207 and repeats the above operation.
この発明の実施の形態1によれば、長周期振動時管制運転と火災の検知とが重複した場合であっても、消防夫がエレベータを利用して消防活動を適切に行うことができるようになる。即ち、非常運転優先装置16によって長周期振動時管制運転が解除された場合は、所定の条件下、点検運転が実施されるため、その後にエレベータを使用する消防夫の安全を確保することができる。特に、上記構成であれば、長周期振動時管制運転の解除後、エレベータが共振階に所定時間以上停止した場合は、上記点検運転を実施しなければ非常運転が継続できない。このため、建物の揺れが長時間に渡る場合でも、消防夫の安全を確実に確保し、円滑な消防活動が可能となる。
According to the first embodiment of the present invention, even if the long-period vibration control operation and the fire detection are overlapped, the firefighter can appropriately perform the firefighting activities using the elevator. Become. In other words, when the emergency
また、上記点検運転は、昇降路機器等の破損が発生していた場合に備え、通常運転の走行速度よりも低速で行われる。このような構成であれば、点検運転を実施したことによる被害の拡大を防止することも可能となる。 In addition, the inspection operation is performed at a lower speed than the traveling speed of the normal operation in preparation for a case where the hoistway device or the like is damaged. With such a configuration, it is possible to prevent the spread of damage due to the inspection operation.
1 昇降路
2 機械室
3 かご
4 釣合い重り
5 メインロープ
6 巻上機
7 駆動綱車
8 そらせ車
9 乗場
10 乗場ドア装置
11 制御盤
12 長周期振動検知装置
13 制御ケーブル
14 防災センター
15 監視装置
16 非常運転優先装置
17 管制運転制御手段
18 動作判定手段
19 優先判定手段
20 非常運転制御手段
DESCRIPTION OF
Claims (1)
前記長周期振動検知装置の検知結果に基づいて、長周期振動時管制運転を制御する管制運転制御手段と、
運転を切替える切替スイッチと
を備え、
前記切替スイッチは、スプリングバックである投入位置とスプリングバックでない複数の投入位置とを有し、
前記スプリングバックでない複数の投入位置のうちの1つは、前記長周期振動時管制運転よりも消防活動に必要な非常運転を優先する投入位置であり、
前記スプリングバックでない複数の投入位置のうちの他の1つは、前記非常運転を優先しない投入位置であり、
前記スプリングバックである投入位置は、前記非常運転を継続するための点検運転を実施する投入位置である
ことを特徴とするエレベータの制御装置。 A long-period vibration detector capable of detecting long-period vibrations generated in buildings due to long-period ground motion or strong winds;
Based on the detection result of the long-period vibration detection device, control operation control means for controlling the control operation during long-period vibration, and
A changeover switch for switching operation ,
The changeover switch has a closing position that is a spring back and a plurality of closing positions that are not a spring back,
Wherein one of the plurality of input positions that are not spring back, a making position you priority to emergency operation necessary firefighting than during control operation the long periodic oscillation,
The other one of the plurality of input positions that are not the springback is an input position that does not give priority to the emergency operation ,
The elevator control device according to claim 1, wherein the closing position as the springback is a closing position for performing an inspection operation for continuing the emergency operation .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008146069A JP5581572B2 (en) | 2008-06-03 | 2008-06-03 | Elevator control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008146069A JP5581572B2 (en) | 2008-06-03 | 2008-06-03 | Elevator control device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009292555A JP2009292555A (en) | 2009-12-17 |
| JP2009292555A5 JP2009292555A5 (en) | 2012-11-29 |
| JP5581572B2 true JP5581572B2 (en) | 2014-09-03 |
Family
ID=41541124
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008146069A Active JP5581572B2 (en) | 2008-06-03 | 2008-06-03 | Elevator control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5581572B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5951666B2 (en) * | 2014-03-10 | 2016-07-13 | 東芝エレベータ株式会社 | elevator |
| JP5902235B2 (en) * | 2014-06-13 | 2016-04-13 | 東芝エレベータ株式会社 | Elevator control device and elevator control method |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS594584A (en) * | 1982-06-28 | 1984-01-11 | 三菱電機株式会社 | Drive for elevator |
| JPH09286575A (en) * | 1996-04-22 | 1997-11-04 | Mitsubishi Denki Bill Techno Service Kk | Elevator |
| JP5078250B2 (en) * | 2005-08-31 | 2012-11-21 | 三菱電機株式会社 | Elevator apparatus and control method thereof |
| JP5205969B2 (en) * | 2006-08-29 | 2013-06-05 | 三菱電機株式会社 | Elevator control device and control method |
-
2008
- 2008-06-03 JP JP2008146069A patent/JP5581572B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009292555A (en) | 2009-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5205969B2 (en) | Elevator control device and control method | |
| JP4680864B2 (en) | Elevator control device and elevator control method | |
| JP5111526B2 (en) | Elevator control device | |
| JP5190210B2 (en) | Elevator maintenance management system | |
| JP2012201504A (en) | Simulative confirmation system for elevator function | |
| JP5263723B2 (en) | Elevator apparatus, elevator automatic recovery method and program thereof | |
| JP5581572B2 (en) | Elevator control device | |
| JP4748194B2 (en) | Elevator control device and control method | |
| JP4681032B2 (en) | Elevator control device and control method | |
| JP5645324B2 (en) | Elevator control device | |
| JP2008230778A (en) | Disaster time operation control device of elevator | |
| KR100919548B1 (en) | Elevator control apparatus and control method | |
| JP2012126499A (en) | Elevator | |
| JP2005053639A (en) | Rescue system of passenger stuck in elevator | |
| JP2012162390A (en) | Voice information device of elevator | |
| JP2009196770A (en) | Control device and control method of elevator and renovation method of existing elevator | |
| JP2007331902A (en) | Control device of elevator | |
| JP2008174380A (en) | Device and method for controlling elevator | |
| JP2007254037A (en) | Operation control device for elevator | |
| JP2007254038A (en) | Operation control device for elevator | |
| JP2008074519A (en) | Control device for elevator, and control method for elevator | |
| JP2002356283A (en) | Rope elongation detecting device and safe operating method for elevator | |
| JP2008019048A (en) | Long-period earthquake detection device and long-period earthquake detection method for elevator | |
| JP2015168534A (en) | Controlled operation system for elevator | |
| JP2006232488A (en) | Elevator control operation device and maintenance/inspection method for the device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121011 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140617 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140630 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5581572 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |