JP5554688B2 - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP5554688B2 JP5554688B2 JP2010259070A JP2010259070A JP5554688B2 JP 5554688 B2 JP5554688 B2 JP 5554688B2 JP 2010259070 A JP2010259070 A JP 2010259070A JP 2010259070 A JP2010259070 A JP 2010259070A JP 5554688 B2 JP5554688 B2 JP 5554688B2
- Authority
- JP
- Japan
- Prior art keywords
- reflection source
- radar
- type
- change amount
- wave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000008859 change Effects 0.000 claims description 109
- 238000009826 distribution Methods 0.000 claims description 86
- 238000000034 method Methods 0.000 claims description 55
- 230000005540 biological transmission Effects 0.000 claims description 50
- 238000012937 correction Methods 0.000 claims description 30
- 238000004364 calculation method Methods 0.000 claims description 17
- 239000002184 metal Substances 0.000 claims description 17
- 229910052751 metal Inorganic materials 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 13
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 7
- 238000004458 analytical method Methods 0.000 claims description 3
- 238000012545 processing Methods 0.000 description 93
- 230000008569 process Effects 0.000 description 28
- 238000012986 modification Methods 0.000 description 17
- 230000004048 modification Effects 0.000 description 17
- 239000011159 matrix material Substances 0.000 description 14
- 230000001186 cumulative effect Effects 0.000 description 12
- 238000001228 spectrum Methods 0.000 description 12
- 238000005070 sampling Methods 0.000 description 10
- 238000011144 upstream manufacturing Methods 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 6
- 239000013598 vector Substances 0.000 description 6
- 238000005259 measurement Methods 0.000 description 4
- 230000003321 amplification Effects 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 239000006185 dispersion Substances 0.000 description 2
- 238000005315 distribution function Methods 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000017105 transposition Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000009827 uniform distribution Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
- G01S7/411—Identification of targets based on measurements of radar reflectivity
- G01S7/412—Identification of targets based on measurements of radar reflectivity based on a comparison between measured values and known or stored values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/932—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles using own vehicle data, e.g. ground speed, steering wheel direction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/74—Multi-channel systems specially adapted for direction-finding, i.e. having a single antenna system capable of giving simultaneous indications of the directions of different signals
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Signal Processing (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
即ち、車載型のレーダ装置には、自車両周辺の道路環境を推定する環境推定手段を設けて、判別手段は、判別対象とする反射元の種類毎に、確率分布記憶手段が記憶する当該種類の確率分布と、環境推定手段により推定された道路環境と、に基づき、変化量算出手段で算出された変化量Yに対応するレーダ波の反射元が当該種類の反射元である確度を算出し、反射元の種類毎の確度に基づき、変化量算出手段で算出された変化量Yに対応するレーダ波の反射元の種類を判別する構成にされると好ましい(請求項4)。
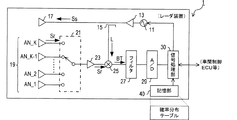
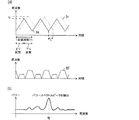
本実施例のレーダ装置1は、FMCW方式によりレーダ波を送受信する車載型のFMCWレーダ装置であり、図1に示すように、周波数が時間に対して直線的に漸次増減するミリ波帯の高周波信号を生成する発振器11と、発振器11が生成する高周波信号を増幅する増幅器13と、増幅器13の出力を送信信号Ssとローカル信号Lとに電力分配する分配器15と、送信信号Ssに応じたレーダ波を発射する送信アンテナ17と、を備える。尚、図2(a)は、レーダ波の送信信号Ss及び受信信号Srを示したグラフ(上段)及びビート信号BTを示したグラフ(下段)である。図2(a)に示すように、本実施例のレーダ装置1は、レーダ波を、三角形状に周波数変調して発射する。

具体的には、まずパワー(受信電力)を推定する対象であるS270で推定した反射波の各到来方位θ1,…,θMに対応するステアリングベクトルa(θ1),…,a(θM)を用いて、次の方向行列A(所謂アレー応答行列)を生成する。
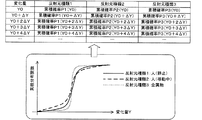
また、この処理を終えると、信号処理部30は、S320に移行し、判別対象とする反射元種類毎に、S310で算出された変化量Yが仮に当該種類の反射元から到来したレーダ波に基づき算出された変化量Yである場合に当該変化量Yが得られる確率Pr(以下、変化量Yの発生確率Prとも言う。)を、記憶部40が記憶する確率分布テーブルに記された該当種類の確率分布の情報に基づいて導出する(S320)。尚、上述したように確率分布テーブルには、確率分布として各変化量Yでの累積確率が離散的に記されていることから、ここでは、S310で算出された変化量Yに対応する累積確率と隣接する変化量Yの累積確率との差分を算出することで、変化量Yに対応する累積確率の微分である確率密度を算出する。即ち、S320では、上記手法で、S310で算出された変化量Yの確率密度を算出することで、変化量Yの発生確率Prを反射元種類毎に算出する。
[第一変形例]
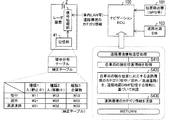
続いて、第一変形例について説明する。第一変形例のレーダ装置2は、記憶部40に対応する記憶部41が確率分布テーブルに加えて補正テーブルを記憶する点、信号処理部30に対応する信号処理部31が車内LANを通じてナビゲーションECU100と通信可能に構成されている点、及び、信号処理部31が実行する物標推定処理の一部が上記実施例と異なる点を除けば、基本的に上記実施例のレーダ装置1と同一構成にされている。従って、以下では、第一変形例のレーダ装置2の説明として、上記実施例のレーダ装置1と同一構成の説明を省略する。
[第二変形例]
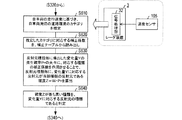
続いて、第二変形例のレーダ装置3について説明する。但し、第二変形例のレーダ装置3は、信号処理部31に対応する信号処理部32がナビゲーションECU100を通じて上記道路環境のカテゴリ情報を取得する代わりに速度センサ105から自車両の速度情報を取得する構成にされている点、及び、信号処理部32が実行する物標推定処理の一部が上記第一変形例と異なる点を除けば、基本的に第一変形例のレーダ装置2と同一構成にされている。従って、以下では、第二変形例のレーダ装置3の説明として、上述のレーダ装置1,2と同一構成の説明を省略する。
Claims (9)
- レーダ波を発射し、当該レーダ波の反射波を受信する送受信手段と、
前記送受信手段が受信した前記反射波の受信信号に基づき、前記反射波の信号強度を検出する検出手段と、
前記検出手段により検出された前記反射波の信号強度Pと、前記信号強度Pに対応する前記反射波の受信時点から所定の観測周期Tsw遡った時点で前記送受信手段により受信された前記反射波の前記検出手段により検出された信号強度Pbと、に基づき、前記信号強度Pbに対する前記信号強度Pの変化量Yを算出する変化量算出手段と、
判別対象とする反射元の種類毎に、前記レーダ波が当該種類の反射元で反射して到来する前記反射波から算出される前記変化量Yの確率分布を記憶する確率分布記憶手段と、
前記確率分布記憶手段が記憶する前記種類毎の確率分布に基づき、前記変化量算出手段で算出された前記変化量Yに対応する前記レーダ波の反射元の種類を判別する判別手段と、
を備え、前記レーダ波の送信波長λ及び前記観測周期Tswは、前記判別対象とする複数種類の前記反射元のいずれにおいても、その反射元において前記観測周期Tswの間に生じる各反射面からの反射波成分の位相変化量Δφがπを超えないように定められていること
を特徴とするレーダ装置。 - 前記確率分布記憶手段は、前記種類毎の確率分布として少なくとも、前記反射元が金属物であるときの前記確率分布、及び前記反射元が人であるときの前記確率分布を記憶し、
前記判別手段は、前記確率分布に基づき、前記反射元の種類として、少なくとも前記金属物及び人の夫々を判別可能な構成にされていること
を特徴とする請求項1記載のレーダ装置。 - 前記判別手段は、前記判別対象とする反射元の種類毎に、前記確率分布記憶手段が記憶する当該種類の前記確率分布に基づき、前記変化量算出手段で算出された前記変化量Yの発生確率であって当該変化量Yに対応する前記レーダ波の反射元が仮に当該種類の反射元であるときの発生確率を導出し、前記導出した発生確率が最大である前記反射元の種類を、前記変化量算出手段で算出された前記変化量Yに対応する反射元の種類として判別すること
を特徴とする請求項1又は請求項2記載のレーダ装置。 - 車載型のレーダ装置であって、
自車両周辺の道路環境を推定する環境推定手段
を備え、
前記判別手段は、
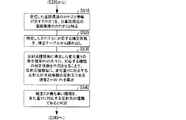
前記判別対象とする反射元の種類毎に、前記確率分布記憶手段が記憶する当該種類の前記確率分布と、前記環境推定手段により推定された前記道路環境と、に基づき、前記変化量算出手段で算出された前記変化量Yに対応する前記レーダ波の反射元が当該種類の反射元である確度を算出し、
前記反射元の種類毎の前記確度に基づき、前記変化量算出手段で算出された前記変化量Yに対応する前記レーダ波の反射元の種類を判別すること
を特徴とする請求項1又は請求項2記載のレーダ装置。 - 前記判別手段は、前記判別対象とする反射元の種類毎に、前記確率分布記憶手段が記憶する当該種類の前記確率分布に基づき、前記変化量算出手段で算出された前記変化量Yの発生確率であって前記レーダ波の反射元が当該種類の反射元であると仮定した場合での発生確率を導出し、当該導出した発生確率に、前記環境推定手段により推定された前記道路環境に対応した補正を加えることで、前記変化量算出手段で算出された前記変化量Yに対応する前記レーダ波の反射元が当該種類の反射元である確度を算出すること
を特徴とする請求項4記載のレーダ装置。 - 前記環境推定手段は、各区域の道路環境を表すデータを記憶する道路環境データベースから、自車両の現在位置に対応する区域の道路環境を表すデータを取得して、この取得データが表す道路環境を、自車両周辺の道路環境であると推定すること
を特徴とする請求項4又は請求項5記載のレーダ装置。 - 前記環境推定手段は、自車両の走行速度に基づき、前記道路環境を推定すること
を特徴とする請求項4又は請求項5記載のレーダ装置。 - 前記レーダ装置は、FMCW(Frequency Modulated Continuous Wave)方式又はSFW(Stepped Frequency Waveforms)方式にて前記レーダ波の送受信を行うFMCWレーダ装置又はSFWレーダ装置であること
を特徴とする請求項1〜請求項7のいずれか一項記載のレーダ装置。 - 前記送受信手段は、FMCW(Frequency Modulated Continuous Wave)方式又はSFW(Stepped Frequency Waveforms)方式にて、前記レーダ波を送信アンテナから発射し、当該レーダ波の反射波をアレーアンテナで受信する手段であり、
前記レーダ装置は、
前記アレーアンテナを構成する各アンテナ素子からの受信信号に前記レーダ波の送信信号を混合して、前記アンテナ素子毎のビート信号を生成するビート信号生成手段と、
前記ビート信号生成手段により生成された前記アンテナ素子毎のビート信号に基づき、前記レーダ波の反射元までの距離及び前記反射元の方位を検出する信号解析手段と、
備え、
前記検出手段は、前記ビート信号生成手段により生成された前記アンテナ素子毎のビート信号に基づき、前記距離及び方位の異なる反射元毎に、当該反射元から到来した前記反射波の信号強度を検出し、
前記変化量算出手段は、前記反射元毎に、当該反射元から到来した前記反射波の前記検出手段により検出された信号強度Pと、当該信号強度Pに対応する前記反射波の受信時点から前記観測周期Tsw遡った時点で当該反射元から到来し前記送受信手段により受信された前記反射波の前記検出手段により検出された信号強度Pbと、に基づき、前記信号強度Pbに対する前記信号強度Pの変化量Yを算出し、
前記判別手段は、前記反射元毎に、当該反射元の種類を、前記変化量算出手段で算出された前記変化量Yと、前記確率分布記憶手段が記憶する前記種類毎の確率分布とに基づき判別すること
を特徴とする請求項1〜請求項8のいずれか一項記載のレーダ装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010259070A JP5554688B2 (ja) | 2010-11-19 | 2010-11-19 | レーダ装置 |
| DE102011086114.9A DE102011086114B4 (de) | 2010-11-19 | 2011-11-10 | Radarvorrichtung |
| US13/298,556 US8686893B2 (en) | 2010-11-19 | 2011-11-17 | Radar device |
| CN201110376447.5A CN102565781B (zh) | 2010-11-19 | 2011-11-18 | 雷达设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010259070A JP5554688B2 (ja) | 2010-11-19 | 2010-11-19 | レーダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012112653A JP2012112653A (ja) | 2012-06-14 |
| JP5554688B2 true JP5554688B2 (ja) | 2014-07-23 |
Family
ID=46063859
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010259070A Active JP5554688B2 (ja) | 2010-11-19 | 2010-11-19 | レーダ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8686893B2 (ja) |
| JP (1) | JP5554688B2 (ja) |
| CN (1) | CN102565781B (ja) |
| DE (1) | DE102011086114B4 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5666987B2 (ja) * | 2011-05-25 | 2015-02-12 | 株式会社デンソー | 移動物体検出装置 |
| US20150042503A1 (en) * | 2012-03-02 | 2015-02-12 | The University Of Melbourne | Method of target detection |
| KR101417408B1 (ko) * | 2012-11-15 | 2014-07-14 | 현대자동차주식회사 | 레이더를 이용한 객체 인식방법 및 시스템 |
| US9250324B2 (en) * | 2013-05-23 | 2016-02-02 | GM Global Technology Operations LLC | Probabilistic target selection and threat assessment method and application to intersection collision alert system |
| JP5990761B2 (ja) | 2013-10-03 | 2016-09-14 | トヨタ自動車株式会社 | レーダ装置 |
| DE102013018752A1 (de) | 2013-11-08 | 2015-05-13 | Daimler Ag | Verfahren zur Klassifikation von Fußgängern |
| EP2881754A1 (en) * | 2013-12-06 | 2015-06-10 | Autoliv Development AB | Vehicle radar for environmental detection |
| KR101892306B1 (ko) * | 2013-12-18 | 2018-08-27 | 주식회사 만도 | Fmcw 레이더 기반의 도로 환경 감지 방법 및 장치 |
| US9547070B2 (en) * | 2013-12-26 | 2017-01-17 | International Business Machines Corporation | Radar integration with handheld electronic devices |
| JP6321464B2 (ja) * | 2014-06-13 | 2018-05-09 | 株式会社デンソー | レーダ装置 |
| EP3098623A1 (en) * | 2015-05-25 | 2016-11-30 | Autoliv Development AB | A vehicle radar system |
| JP6557532B2 (ja) * | 2015-07-21 | 2019-08-07 | 株式会社トプコン | 照明設備の管理システム |
| CN105044722B (zh) * | 2015-08-03 | 2018-09-25 | 西安电子科技大学 | 合成孔径雷达目标的全贝叶斯特征提取方法 |
| US10126418B1 (en) * | 2015-09-08 | 2018-11-13 | Waymo LLP | Pulse-doppler rada measurement of crossing target dynamics |
| SE1551370A1 (sv) * | 2015-10-22 | 2017-02-07 | Uniquesec Ab | Testing method with virtual radar signatures for an automotive safety radar system |
| KR101871571B1 (ko) * | 2016-04-07 | 2018-06-27 | 국방과학연구소 | 항공기 식별 장치 및 방법 |
| US10592805B2 (en) * | 2016-08-26 | 2020-03-17 | Ford Global Technologies, Llc | Physics modeling for radar and ultrasonic sensors |
| JP2018072014A (ja) | 2016-10-25 | 2018-05-10 | ソニーセミコンダクタソリューションズ株式会社 | レーダ装置、信号処理装置及び信号処理方法 |
| US10914829B2 (en) | 2017-01-27 | 2021-02-09 | Panasonic Intellectual Property Management Co., Ltd. | Positioning sensor, sensor, and method |
| JP6489589B2 (ja) * | 2017-05-24 | 2019-03-27 | 三菱電機株式会社 | レーダ信号処理装置 |
| KR102077000B1 (ko) * | 2018-01-29 | 2020-04-07 | 주식회사 만도 | 레이더의 안테나 반사손실 보상 장치 및 방법과, 그를 이용하는 레이더 장치 |
| JP6570675B2 (ja) * | 2018-02-15 | 2019-09-04 | 三菱電機株式会社 | レーダ信号処理装置 |
| US10914819B2 (en) * | 2018-08-02 | 2021-02-09 | GM Global Technology Operations LLC | Mitigating vibration in a radar system on a moving platform |
| US11789120B2 (en) | 2019-01-24 | 2023-10-17 | Telefonaktiebolaget Lm Ericsson (Publ) | Network node and method performed therein for handling data of objects in a communication network |
| JP7115402B2 (ja) * | 2019-04-10 | 2022-08-09 | 株式会社デンソー | レーダ装置 |
| JP7476495B2 (ja) * | 2019-08-20 | 2024-05-01 | オムロン株式会社 | 自律走行車両の衝突回避装置、衝突回避方法、衝突回避プログラム |
| CN111751794B (zh) * | 2020-06-10 | 2024-03-19 | 中国人民解放军海军航空大学青岛校区 | 一种雷达威力监控方法 |
| CN117665741A (zh) * | 2022-08-26 | 2024-03-08 | 上海禾赛科技有限公司 | 激光雷达回波信号处理方法及装置、激光雷达探测系统 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5565870A (en) * | 1993-06-28 | 1996-10-15 | Nissan Motor Co., Ltd. | Radar apparatus with determination of presence of target reflections |
| JP4016826B2 (ja) | 2002-12-10 | 2007-12-05 | 株式会社デンソー | 物標識別方法及び装置、プログラム |
| JP2004239792A (ja) * | 2003-02-07 | 2004-08-26 | Hitachi Ltd | 車載用レーダ装置 |
| JP4046648B2 (ja) * | 2003-06-03 | 2008-02-13 | 富士通テン株式会社 | 目標物判別装置 |
| US7248205B2 (en) * | 2004-02-09 | 2007-07-24 | Anritsu Corporation | Radar apparatus |
| JP4462060B2 (ja) * | 2005-02-14 | 2010-05-12 | 株式会社デンソー | Fmcwレーダ装置 |
| JP4754856B2 (ja) * | 2005-03-31 | 2011-08-24 | 株式会社デンソーアイティーラボラトリ | 車載用レーダ装置 |
| JP4769684B2 (ja) * | 2006-10-12 | 2011-09-07 | 株式会社デンソーアイティーラボラトリ | 電子走査式レーダ装置 |
| WO2008105458A1 (ja) * | 2007-02-28 | 2008-09-04 | Denso Corporation | 電子走査式レーダ装置及び受信用アレーアンテナ |
| JP2008232832A (ja) * | 2007-03-20 | 2008-10-02 | Denso Corp | 干渉判定方法,fmcwレーダ |
| US7592945B2 (en) | 2007-06-27 | 2009-09-22 | Gm Global Technology Operations, Inc. | Method of estimating target elevation utilizing radar data fusion |
| EP2294444A1 (en) * | 2008-05-05 | 2011-03-16 | Raytheon Company | Methods and apparatus for detection/classification of radar targets including birds and other hazards |
| JP5519132B2 (ja) | 2008-07-28 | 2014-06-11 | 株式会社デンソー | レーダ装置 |
| JP5102165B2 (ja) * | 2008-09-22 | 2012-12-19 | 株式会社デンソー | レーダ装置 |
| US9250315B2 (en) * | 2009-03-04 | 2016-02-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Collision avoidance system and method |
-
2010
- 2010-11-19 JP JP2010259070A patent/JP5554688B2/ja active Active
-
2011
- 2011-11-10 DE DE102011086114.9A patent/DE102011086114B4/de active Active
- 2011-11-17 US US13/298,556 patent/US8686893B2/en active Active
- 2011-11-18 CN CN201110376447.5A patent/CN102565781B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20120127016A1 (en) | 2012-05-24 |
| CN102565781B (zh) | 2014-08-06 |
| CN102565781A (zh) | 2012-07-11 |
| US8686893B2 (en) | 2014-04-01 |
| JP2012112653A (ja) | 2012-06-14 |
| DE102011086114B4 (de) | 2021-12-02 |
| DE102011086114A1 (de) | 2012-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5554688B2 (ja) | レーダ装置 | |
| US11209523B2 (en) | FMCW radar with interference signal rejection | |
| JP6548376B2 (ja) | レーダシステム、レーダ信号処理装置、車両走行制御装置および方法、ならびにコンピュータプログラム | |
| JP4905512B2 (ja) | 物標情報推定装置 | |
| JP4867200B2 (ja) | レーダ装置 | |
| JP4665948B2 (ja) | 物標識別装置、プログラム | |
| JP4829517B2 (ja) | レーダ信号処理装置 | |
| US20080231496A1 (en) | Method for determining noise floor level and radar using the same | |
| CN106405511A (zh) | 用于自动车辆的雷达信号处理 | |
| JP6489589B2 (ja) | レーダ信号処理装置 | |
| JP2009025195A (ja) | 到来波数推定方法、レーダ装置 | |
| JP6413457B2 (ja) | 降水判定装置 | |
| JP2003240843A (ja) | Fmcwレーダ装置,プログラム | |
| US10983195B2 (en) | Object detection apparatus | |
| JP7173735B2 (ja) | レーダ装置及び信号処理方法 | |
| WO2014147859A1 (ja) | レーダ装置 | |
| JP2015028440A (ja) | レーダ装置、及び、信号処理方法 | |
| US20230168360A1 (en) | Radar measurement method | |
| JP2019109179A (ja) | 車両の物体検出装置 | |
| JP2010271337A (ja) | レーダ装置 | |
| WO2013172427A1 (ja) | レーダ装置及びレーダ装置の到来波処理方法 | |
| KR20190016254A (ko) | 거리 측정 방법 및 장치 | |
| US11892557B2 (en) | Radar device | |
| JP2010237087A (ja) | レーダ装置及びそれを用いた電波到来方向の計測方法 | |
| JP4882329B2 (ja) | 信頼度算出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130603 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140314 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140529 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5554688 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |