JP5534016B2 - 制御装置及び制御方法並びに移動通信システム - Google Patents
制御装置及び制御方法並びに移動通信システム Download PDFInfo
- Publication number
- JP5534016B2 JP5534016B2 JP2012531614A JP2012531614A JP5534016B2 JP 5534016 B2 JP5534016 B2 JP 5534016B2 JP 2012531614 A JP2012531614 A JP 2012531614A JP 2012531614 A JP2012531614 A JP 2012531614A JP 5534016 B2 JP5534016 B2 JP 5534016B2
- Authority
- JP
- Japan
- Prior art keywords
- base station
- transmission power
- henb
- change
- enb
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 123
- 238000010295 mobile communication Methods 0.000 title claims description 23
- 230000005540 biological transmission Effects 0.000 claims description 198
- 230000008859 change Effects 0.000 claims description 95
- 238000005259 measurement Methods 0.000 claims description 49
- 238000004891 communication Methods 0.000 claims description 40
- 230000004044 response Effects 0.000 claims description 40
- 238000012508 change request Methods 0.000 claims description 25
- 230000008569 process Effects 0.000 description 113
- 238000012545 processing Methods 0.000 description 66
- 238000004364 calculation method Methods 0.000 description 39
- 238000010586 diagram Methods 0.000 description 19
- 230000007423 decrease Effects 0.000 description 12
- 230000006870 function Effects 0.000 description 10
- 230000003247 decreasing effect Effects 0.000 description 6
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000015556 catabolic process Effects 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000013468 resource allocation Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images

























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/02—Resource partitioning among network components, e.g. reuse partitioning
- H04W16/06—Hybrid resource partitioning, e.g. channel borrowing
- H04W16/08—Load shedding arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/0005—Control or signalling for completing the hand-off
- H04W36/0083—Determination of parameters used for hand-off, e.g. generation or modification of neighbour cell lists
- H04W36/00837—Determination of triggering parameters for hand-off
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/24—Reselection being triggered by specific parameters
- H04W36/30—Reselection being triggered by specific parameters by measured or perceived connection quality data
- H04W36/304—Reselection being triggered by specific parameters by measured or perceived connection quality data due to measured or perceived resources with higher communication quality
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W52/00—Power management, e.g. TPC [Transmission Power Control], power saving or power classes
- H04W52/04—TPC
- H04W52/18—TPC being performed according to specific parameters
- H04W52/24—TPC being performed according to specific parameters using SIR [Signal to Interference Ratio] or other wireless path parameters
- H04W52/243—TPC being performed according to specific parameters using SIR [Signal to Interference Ratio] or other wireless path parameters taking into account interferences
- H04W52/244—Interferences in heterogeneous networks, e.g. among macro and femto or pico cells or other sector / system interference [OSI]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/04—Reselecting a cell layer in multi-layered cells
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/02—Hierarchically pre-organised networks, e.g. paging networks, cellular networks, WLAN [Wireless Local Area Network] or WLL [Wireless Local Loop]
- H04W84/04—Large scale networks; Deep hierarchical networks
- H04W84/042—Public Land Mobile systems, e.g. cellular systems
- H04W84/045—Public Land Mobile systems, e.g. cellular systems using private Base Stations, e.g. femto Base Stations, home Node B
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mobile Radio Communication Systems (AREA)
Description
本発明は、移動通信システムなどの通信システム上の無線基地局を制御する制御装置及び方法の技術分野に関する。
移動通信システムにおいては、無線リソースの効率利用や、電波不感地帯の解消、エリア展開コストの削減、通信品質の向上などを目的として、所謂マクロセルと比較して送信電力の低いフェムトセルの使用が拡大している。このようなマクロセルとフェムトセルとが混在する移動通信システムにおいては、通信品質を向上させるために、可能であればなるべくフェムトセルに移動端末が在圏して、通信を行うことが望ましい。フェムトセルにより多くの移動端末を在圏させるためには、例えばフェムトセルの送信電力を増加させ、セル半径を拡大することが考えられる。
しかしながら、マクロセルとフェムトセルとが同じ周波数帯域を用いている移動通信システムにおいては、マクロセルとフェムトセルとの夫々の送信電波が相互に干渉し合い、相手側の通信品質の劣化に繋がっている。特に、上述のようにフェムトセルにおける通信品質の向上のために送信電力を増加する場合、該フェムトセル周辺に位置するマクロセル及び他のフェムトセルの通信に与える干渉が増加する可能性がある。
例えば以下に示す先行技術文献には、マクロセルとフェムトセルとの間の与干渉による通信品質の劣化に係る技術的な課題を解決するための技術について説明されている。以下の先行技術文献には、移動端末のハンドオーバ要求を拒否したフェムトセルの送信電力を低減させ、セル半径を縮小することで、ハンドオーバ要求元のセルに在圏する移動端末への干渉を抑制する技術が説明されている。
しかしながら、上述の先行技術文献において説明される技術についても、以下に示す課題を残している。ある移動端末のハンドオーバ動作においてフェムトセルの送信電力を低減させる場合、該フェムトセルと接続中の他の移動端末への与干渉に影響を及ぼし、干渉量が増大する。その結果、移動端末の通信速度の低下や、通信の不能に繋がる。
他方で、フェムトセルに対してより多くの移動端末を在圏させたいとの要請もある。ハンドオーバ時に、フェムトセルの送信電力を増加させ、セル半径を拡大することで、移動端末が好適にフェムトセルにハンドオーバし、通信を開始できるという利点がある。
本発明は、上述した問題に鑑みて為されたものであり、フェムトセルからの干渉量を抑制し、他の移動端末について好適な通信を継続させつつ、ある移動端末について好適なハンドオーバを実現する制御装置及び方法、並びに移動通信システムを提供することを課題とする。
上記課題を解決するために、開示の制御装置は、第1無線区間を形成して移動端末と通信する第1基地局と、第1無線区間内に重複し、且つ第1無線区間より相対的に送信電力が低い第2無線区間を形成して移動端末と通信する第2基地局との動作を制御する。
上記制御を実施するために、開示の制御装置は、接続変更判定部と、測定部と、変更値決定部と、予測部と、電力変更部とを備える。
接続変更判定部は、移動端末からの接続先の変更要求に対して、接続の可否を判定する。測定部は、第1無線区間に位置する全ての移動端末について、第1基地局又は第2基地局からの通信状況を測定する。変更値決定部は、第2基地局の送信電力の変更値を決定する。予測部は、変更値に基づいて第2基地局の送信電力を変更した後の通信状況を予測する。電力変更部は、変更値に基づいて第2基地局の送信電力を変更する。
また、電力変更部は、移動端末が第1基地局及び第2基地局の間で接続先を変更する際に、通信状況の測定結果及び予測結果に応じて、第2基地局の送信電力を変更する。
開示の制御方法は、接続変更判定工程と、測定工程と、変更値決定工程と、予測工程と、電力変更工程とを備える。各工程では、上述した制御装置が備える各部が行うものと同様の動作が行われる。
開示の移動通信システムは、上述の制御装置と同様の装置を備える。
上述の構成によれば、例えばマクロセル基地局である第1基地局とフェムトセル基地局である第2基地局とが混在する移動通信システム内のエリアにおいて、移動端末のハンドオーバ時に、第2基地局から他の移動端末に与える干渉量の悪化を抑制出来る。更に、干渉量の悪化を行うことなく、第2基地局の送信電力をハンドオーバの態様に応じて変更することが出来、ハンドオーバ処理を精確に実施可能となる。
以下に、発明を実施するための実施形態について説明する。
(1)構成例
図1を参照して、開示の制御装置の一例が適用される移動通信システムの構成を示す。図1は、移動通信システム1の全体の構成を示すブロック図である。移動通信システム1は、例えば、LTE(Long Term Evolution)方式を採用する無線通信システムなどである。
図1を参照して、開示の制御装置の一例が適用される移動通信システムの構成を示す。図1は、移動通信システム1の全体の構成を示すブロック図である。移動通信システム1は、例えば、LTE(Long Term Evolution)方式を採用する無線通信システムなどである。
図1に示されるように、移動通信システム1は、制御装置100と、マクロセルを形成する無線基地局であるeNB(evolved Node B)200と、該マクロセルに重複して配置されるフェムトセルを形成する複数の基地局HeNB(Home eNB)300a及びHeNB300bとを備える。eNB200、HeNB300a及びHeNB300bの夫々は、配下のマクロセル又はフェムトセルに在圏するUE400と同一の周波数で無線通信を行う。以降、HeNB300a及びHeNB300bを区別することなく説明する場合には、HeNB300という表記を用いて説明する。尚、実施例においては、第1基地局の例としてマクロセル基地局であるeNB200、第2基地局の例としてフェムトセル基地局であるHeNB300について説明しているがその他の基地局を用いてもよい。例えば、第2基地局の例として、マクロセルより送信電力が低いマイクロセルを用いてもよい。
制御装置100は、開示の制御装置の一例であって、移動通信システム1内の各基地局eNB200、HeNB300a及びHeNB300bの夫々と通信可能な態様で接続される。図2及び図3を参照して、制御装置100の基本的な構成及び機能について説明する。
図2は、制御装置100のハードウェア構成の一例を示すブロック図である。制御装置100は、LSI(Large Scale Integration)101と、CPU102と、メモリ103とを備える。LSI101は、eNB200及びHeNB300と接続し、情報の通信を行う構成である。尚、LSI101の少なくとも一部は、FPGA(Field Programmable Gate Array)を含んでいてもよい。CPU102は、制御装置100の各部の動作を制御すると共に、例えばメモリ103内に格納されるプログラムを実行することで、図3に示す各機能部が行うものと同様の動作を行う。
図3は、制御装置100のCPU102内の機能部構成をブロック図として示したものである。図3に示されるように制御装置100のCPU102は、受信部111、情報収集部112、演算部113、ハンドオーバ判定部114及び送信部115の各機能部を備える。
受信部111は、接続するeNB200又はHeNB300から受信した信号を情報収集部112に転送するインタフェースである。
情報収集部112は、受信部111より受信した信号を解析し、該信号に含まれるメッセージにより要求される動作の実施や、該信号に含まれる情報の取得を行う。また、情報収集部112は、制御装置100における測定部及び予測部の一例であって、eNB200及びHeNB300から送信されるUE400についての送信ユーザデータ量や干渉にかかる情報、位置情報などを収集する。
演算部113は、情報収集部112より受信した信号に基づき、UE400のハンドオーバ処理を行う際の演算処理を行う。また、演算部113は、制御装置100における変更値決定部の一例であって、後述するようにフェムトセル制御処理におけるHeNB300の送信電力の変更値の決定を行う。また、演算部113は、制御装置100における電力変更部の一例であって、決定された送信電力の変更値に基づいてHeNB300に対して、送信電力の変更を指示するメッセージを作成する。
ハンドオーバ判定部114は、制御装置100における接続変更判定部の一例であって、演算部112において実施される演算結果に基づいて、UE400のハンドオーバ処理を行うか否かの判定を行う。
送信部115は、接続するeNB200及びHeNB300に対して情報を送信するためのインタフェースである。
eNB200は、開示の第1基地局の一例であって、例えば、所謂マクロセル基地局である。HeNB300は、開示の第2基地局の一例であって、例えば、マクロセル基地局よりも送信電力の小さい、所謂フェムトセル基地局である。図4及び図5を参照して、eNB200の基本的な構成及び機能について説明する。
図4は、eNB200のハードウェア構成の一例を示すブロック図である。eNB200は、アンテナ201と、アンプ202と、DSP(Digital signal Processor)203と、LSI204と、CPU205と、メモリ206とを備える。アンテナ201は、送信電波を送信し、セルを形成することで、セル内に在圏するUE400と通信を行うためのアンテナである。アンプ202は、アンテナ201において送受信される信号の増幅を行う構成である。DSP203は、ネットワークを介して受信される情報をアンテナ201から出力するための態様に変換する処理や、アンテナ201において受信される情報をネットワークに送信するための態様に変換する処理を行う。LSI204は、制御装置100と接続し、情報の通信を行う構成である。尚、LSI204の少なくとも一部は、FPGA(Field Programmable Gate Array)を含んでいてもよい。CPU205は、eNB200の各部の動作を制御すると共に、例えばメモリ206内に格納されるプログラムを実行することで、図5に示す各機能部が行うものと同様の動作を行う。尚、上述の各構成について、HeNB300もまた同様の構成を備える。以下に説明する機能部についても同様である。
図5は、eNB200のCPU205内の機能部構成をブロック図として示したものである。図5に示されるようにeNB200のCPU205は、受信部211、送信部212、情報収集部213、ハンドオーバ処理部214、電力制御部215、演算部216及びトラヒック測定部217の各機能部を備える。
受信部211は、制御装置100及びUE400から受信した信号を情報収集部213に転送するインタフェースである。送信部212は、制御装置100及びUE400に対して情報を送信するためのインタフェースである。
情報収集部213は、受信部211より受信した信号を解析し、該信号に含まれるメッセージにより要求される動作の実施や、該信号に含まれる情報の取得を行う。
ハンドオーバ処理部214は、情報収集部213においてUE400のハンドオーバを要求するメッセージが受信される場合、該要求に応じたハンドオーバ処理を実施する。また、ハンドオーバ処理部214は、該ハンドオーバ処理のために後述するフェムトセル制御処理の実施の判断を行い、判断結果を情報収集部213に通知する。
電力制御部215は、後述するフェムトセル制御処理において、送信電力の変更が要求される場合、アンテナ201を介して送信する送信電波の送信電力の変更を行う。尚、電力制御部215は、後述するように、主にフェムトセル基地局であるHeNB300において送信電力の変更制御を行う。
演算部216は、eNB200又は、HeNB300が接続中のUE400について、送信している平均ユーザデータ量をトラヒック測定部217に要求する。トラヒック測定部217は、eNB200又は、HeNB300が接続中のUE400の夫々について、送信しているユーザデータ量を適宜測定し、メモリ206に格納する。また、トラヒック測定部217は、演算部216より平均ユーザデータ量の要求がある場合、格納されるユーザデータ量より、個々のUE400についての平均ユーザデータ量を算出し、送信する。
UE400は、開示の移動端末の一例であって、eNB200又はHeNB300の形成するセルに在圏することで、eNB200又はHeNB300を介してコアネットワークと通信を行う。図6及び図7を参照して、UE400の基本的な構成及び機能について説明する。
図6は、UE400のハードウェア構成の一例を示すブロック図である。UE400は、アンテナ401と、アンプ402と、DSP403と、CPU404と、メモリ405とを備える。アンテナ401は、eNB200又はHeNB300からの送信電波を受信し、eNB200又はHeNB300と通信を行うためのアンテナである。アンプ402は、アンテナ401において送受信される信号の増幅を行う構成である。DSP403は、アンテナ401において送受信される信号と、UE400において用いられる情報とを変換する処理を行う。CPU404は、UE400の各部の動作を制御すると共に、例えばメモリ405内に格納されるプログラムを実行することで、図7に示す各機能部が行うものと同様の動作を行う。
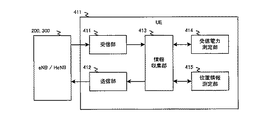
図7は、UE400のCPU404内の機能部構成をブロック図として示したものである。図7に示されるようにUE400のCPU404は、受信部411、送信部412、情報収集部413、受信電力測定部414及び位置情報測定部415の各機能部を備える。
受信部411は、eNB200又はHeNB300から受信した信号を情報収集部413に転送するインタフェースである。送信部412は、eNB200又はHeNB300に対して情報を送信するためのインタフェースである。
情報収集部413は、受信部411より受信した信号を解析し、該信号に含まれるメッセージにより要求される動作の実施や、該信号に含まれる情報の取得を行う。
受信電力測定部414は、接続中のeNB200又はHeNB300、或いは接続していない周辺のeNB200又はHeNB300からの受信電力を定期的に測定する。受信電力測定部414は、接続中のeNB200又はHeNB300から受信電力の測定結果要求を受けた場合などに、測定結果を送信する。
位置情報測定部415は、GPSを用いて当該UE400の位置情報を取得する。このとき、位置情報測定部415は、UE400の位置情報と共に、該位置情報の精度を示すGPS測定誤差も測定する。位置情報測定部415は、接続中のeNB200又はHeNB300から端末位置情報要求を受けた場合などに、位置情報とGPS測定誤差情報とを送信する。
(2)動作例
図8を参照して、制御装置100の動作について説明する。図8は、UE400のハンドオーバ処理に係る制御装置100による処理の流れを示すシーケンス図である。図8に示される例では、eNB200に収容されるUE400が、該eNB200のセルエリア内に重複してフェムトセルを形成するHeNB300にハンドオーバする際の処理が示される。
図8を参照して、制御装置100の動作について説明する。図8は、UE400のハンドオーバ処理に係る制御装置100による処理の流れを示すシーケンス図である。図8に示される例では、eNB200に収容されるUE400が、該eNB200のセルエリア内に重複してフェムトセルを形成するHeNB300にハンドオーバする際の処理が示される。
eNB200と通信中のUE400は、HeNB300からの受信電力を適宜測定している。HeNB300からの受信電力が所定の閾値を超えて大きくなるなどする場合、UEは、eNB200に対して、受信電力の測定結果と共に、該HeNB300へのハンドオーバを要求するメッセージを送信する。
ハンドオーバ要求メッセージを受信したeNB200は、制御装置100に対して、ハンドオーバ先のHeNB300を特定する情報を含むフェムトセル変更要求メッセージM11を送信する。フェムトセル変更要求メッセージM11は、ハンドオーバ元のeNB200より、制御装置100に対して、ハンドオーバ先のHeNB300における送信電力、ひいてはセル半径の変更を行うフェムトセル制御を要求するメッセージである。
フェムトセル変更要求メッセージM11に含まれる情報について、図9(a)に例を示す。フェムトセル変更要求メッセージM11は、送信先の制御装置100、送信元のeNB200又はHeNB300、ハンドオーバを要求するUE400及びハンドオーバ先のHeNB300又はeNB200の夫々を特定する情報を含む。
再び図8において、フェムトセル変更要求メッセージM11を受信した制御装置100は、eNB200及びハンドオーバ先のHeNB300を含む複数のHeNB300に対して、現在の送信電力並びに接続中の各UE400の位置及び平均ユーザデータ量の各情報を要求するハンドオーバ情報要求メッセージM21を送信する。
制御装置100は、フェムトセル変更要求メッセージM11の送信元がeNB200である場合、該eNB200及び該eNB200のセルのエリア内にオーバレイする全フェムトセルのHeNB300に対して、ハンドオーバ情報要求メッセージM21を送信する。このとき、制御装置100は、メモリ103内に格納されるeNB200及びHeNB300の配置位置情報などを参照して、ハンドオーバ情報要求メッセージM21の送信先を決定する。
制御装置100は、フェムトセル変更要求メッセージM11の送信元がeNB200である場合、該eNB200及び該eNB200のセルのエリア内にオーバレイする全フェムトセルのHeNB300に対して、ハンドオーバ情報要求メッセージM21を送信する。このとき、制御装置100は、メモリ103内に格納されるeNB200及びHeNB300の配置位置情報などを参照して、ハンドオーバ情報要求メッセージM21の送信先を決定する。
ハンドオーバ情報要求メッセージM21に含まれる情報について、図10(a)に例を示す。ハンドオーバ情報要求メッセージM21は、送信先のHeNB300又はeNB200及び送信元の制御装置100の夫々を特定する情報を含む。
再び図8において、eNB200及びHeNB300は、ハンドオーバ情報要求メッセージM21を受信した後に、接続中のUE400に対して、各UE400の位置情報を要求する端末位置情報要求メッセージM41を送信する。尚、このときeNB200及びHeNB300は、所謂ブロードキャスト通信を用いることで、好適に接続中の全UE400に対して該メッセージを送信してもよい。端末位置情報要求メッセージM41を送信後、eNB200及びHeNB300は、予め設定される所定の期間、接続中のUE400からの応答の受信を待機する。
接続中のeNB200から端末位置情報要求メッセージM41を受信したUE400は、
位置情報測定処理を行う。具体的には、UE400や、位置情報測定部においてGPSを用いた位置情報及びGPS測定誤差の測定を行う。その後、UE400は、端末位置情報要求メッセージM41の送信元のeNB200に対して、該UE400の位置情報及びGPS誤差情報などを含む、端末位置情報応答メッセージM42を送信する。
位置情報測定処理を行う。具体的には、UE400や、位置情報測定部においてGPSを用いた位置情報及びGPS測定誤差の測定を行う。その後、UE400は、端末位置情報要求メッセージM41の送信元のeNB200に対して、該UE400の位置情報及びGPS誤差情報などを含む、端末位置情報応答メッセージM42を送信する。
端末位置情報要求メッセージM41及び端末位置情報応答メッセージM42に含まれる情報について、図12に例を示す。端末位置情報要求メッセージM41は、送信元のeNB200又はHeNB300を特定する情報を含み、端末位置情報を要求する指示をUE400に通知する。端末位置情報応答メッセージM42は、送信先のeNB200又はHeNB300、送信元のUE400の夫々を特定する情報と、送信元のUE400の端末位置情報及びGPS測定誤差情報とを含む。
また、eNB200及びHeNB300は、コアネットワークを介して受信した接続中のUE400の夫々に対するユーザデータの量を定期的に測定し、メモリ内に格納している。eNB200及びHeNB300は、メモリ内に格納されるユーザデータ量に基づき、所定の周期毎の平均ユーザデータ量を算出する。
端末位置情報要求メッセージM41を送信した後のeNB200及びHeNB300の動作の流れについて、図13のフローチャートを参照して説明する。eNB200及びHeNB300は、端末位置情報要求メッセージM41の送信から所定の期間後に、受信した端末位置情報応答メッセージM42から各UE400の位置情報を収集する(ステップS101)。eNB200及びHeNB300は、収集された位置情報に、更に該期間中の平均ユーザデータ量及び該eNB200又は該HeNB300の送信電力を加えたハンドオーバ情報応答メッセージM22を生成して、制御装置100に対して送信する(ステップS104)。
ハンドオーバ情報応答メッセージM22に含まれる情報について、図10(b)に例を示す。ハンドオーバ情報応答メッセージM22は、送信先の制御装置100、送信元のeNB200又はHeNB300を特定する情報と共に、接続中のUE400の夫々について、識別番号♯UE1、2、・・・nと位置情報と平均ユーザデータ量とを含む。また、ハンドオーバ情報応答メッセージM22は、以下に示す動作により判定されるUE400についてのハンドオーバ処理が可能であるか不可能であるかを通知する情報を含む。
eNB200及びHeNB300は、受信したUE400からの端末位置情報応答メッセージM42に含まれるGPS測定誤差に基づいて、ハンドオーバ処理が可能であるか不可能であるかの判定を行う。UE400の位置情報の測定精度を示すGPS測定誤差が大きい場合、後に詳述するように、eNB200又はHeNB300からUE400までの距離に依存する受信電力の算出精度が低下する可能性がある。そこで、eNB200及びHeNB300は、UE400からの端末位置情報応答メッセージM42に含まれるGPS測定誤差について、所定の閾値を決定し、該閾値を超えるGPS測定誤差が検出される場合、その旨を制御装置100に通知し、以降の処理を終了する処理を行ってもよい。
図13に示される例では、eNB200及びHeNB300は、ハンドオーバ実施可能とするGPS測定誤差の閾値について、セル半径Rの10%(0.1R)を設定している。
eNB200及びHeNB300は、受信したUE400からの端末位置情報応答メッセージM42に含まれるGPS測定誤差が、0.1R以下である場合(ステップS102:Yes)に、UE400についてのハンドオーバ処理が可能である旨を通知する情報を含むハンドオーバ情報応答メッセージM22を送信する。
eNB200及びHeNB300は、受信したUE400からの端末位置情報応答メッセージM42に含まれるGPS測定誤差が、0.1R以下である場合(ステップS102:Yes)に、UE400についてのハンドオーバ処理が可能である旨を通知する情報を含むハンドオーバ情報応答メッセージM22を送信する。
他方で、eNB200及びHeNB300は、UE400のGPS測定誤差が0.1Rより大きくなる場合(ステップS102:No)、該UE400については、ハンドオーバ処理が不可であると判定する(ステップS103)。この場合、eNB200及びHeNB300は、制御装置100に対して、ハンドオーバ処理不可能である旨を通知する情報を含むハンドオーバ情報応答メッセージM22を送信する。
制御装置100は、ハンドオーバ情報応答メッセージM22を解析し、ハンドオーバ可能な場合メモリ上のデータベースを更新し、ハンドオーバ処理を実施する。ハンドオーバが不可能な場合、メモリ上のデータベースの更新を行わない。このように設定することで、UE400の位置情報の測定誤差がハンドオーバ処理に与える影響を抑制することが出来る。
再び図8において、制御装置100は、eNB200及びHeNB300より受信したハンドオーバ情報応答メッセージM22に基づいて、UE400のハンドオーバ処理に係る演算処理を演算部113において実施する。また、制御装置100は、UE400のハンドオーバ処理が可能であるか否かについて、ハンドオーバ判定部114において判定する。
上述の演算処理及び判定の結果により、ハンドオーバ先のHeNB300において送信電力の変更が必要と判断される場合、制御装置100は該HeNB300に対して、送信電力変更要求メッセージM31を送信する。
送信電力変更メッセージM31に含まれる情報について、図11(a)に例を示す。送信電力変更メッセージM31は、送信先のHeNB300及び送信元の制御装置100の夫々を特定する情報と、HeNB300に対して送信電力の変更を指定する情報とを含む。
再び図8において、送信電力変更メッセージM31を受信したHeNB300は、電力制御部において、メッセージ中に含まれる電力量に基づくHeNB300の送信電力の変更を行う。変更後、HeNB300は、制御装置100に対して送信電力の変更が実施されたことを通知する送信電力変更応答メッセージM32を送信する。
送信電力変更応答メッセージM32に含まれる情報について、図11(b)に例を示す。送信電力変更応答メッセージM32は、送信先の制御装置100及び送信元のHeNB300の夫々を特定する情報と、HeNB300において送信電力の変更が完了したことを通知する情報とを含む。
再び図8において、送信電力変更応答メッセージM32の受信後に、制御装置100は、UE400のハンドオーバ処理が可能であることを通知するフェムトセル変更応答メッセージM12をハンドオーバ元のeNB200に送信する。
フェムトセル変更要求メッセージM12に含まれる情報について、図9(b)に例を示す。フェムトセル変更要求メッセージM12は、送信先のeNB200又はHeNB300、送信元の制御装置100、ハンドオーバを要求するUE400及びハンドオーバ先のHeNB300又はeNB200の夫々を特定する情報と共に、ハンドオーバ処理結果を通知する情報を含む。
尚、上述の説明では、eNB200のセルに在圏するUE400が、該eNB200のセルエリア内に重複してフェムトセルを形成するHeNB300にハンドオーバする際の処理について説明した。しかしながら、HeNB300のフェムトセルに在圏するUE400がeNB200に対してハンドオーバする際のハンドオーバ処理シーケンスについても同様であってよい。
また、HeNB300のフェムトセルに在圏するUE400が他のHeNB300に対してハンドオーバする際には、移動通信システム1は、従来の、言い換えれば公知のハンドオーバ処理を行う。
(3)フェムトセル制御処理例
上述したフェムトセル制御処理の例について説明する。
上述したフェムトセル制御処理の例について説明する。
フェムトセル制御処理において、制御装置の演算部113において実施されるHeNB300の送信電力を制御するための処理について図14を参照して説明する。図14は、UE400のハンドオーバに係るeNB200とHeNB300の夫々のセルエリアを上方から見た場合の図である。
図14では、eNB200のセル内に在圏するUEの内、ハンドオーバ処理に係る一つのUEをUE(i)、HeNB300のセル内に在圏するUEの内、ハンドオーバ処理に係る一つのUEをUE(j)と表記して他のUEと区別して表す。図14では、eNB200のセルの半径をR、eNB200からUE(i)までの距離をRi、eNB200からUE(j)までの距離をRjと示す。図14では、HeNB300のセルの半径をr、HeNB300からUE(i)までの距離をri、HeNB300からUE(j)までの距離をrjと示す。
図14の例では、UE(i)における、eNB200からの受信電力p(Ri,R)は、所定の係数Sを用いて、以下の式(1)のように表すことが出来る。

eNB200のセル半径Rは、eNB200の送信電力より算出可能であり、eNB200からUE(i)までの距離をRiは、GPSなどにより検出されるUE(i)の位置情報より算出可能となる。上述の式(1)を用いることで、各UE(i)及び(j)におけるeNB200及びHeNB300からの受信電力を距離の関数として算出可能となる。
UE(i)は、eNB200から受信電力p(Ri,R)の電波を受け通信を行っている一方で、HeNB300から電力P(ri,r)の電波による干渉を受ける。この際の信号対干渉比Q(Ri,R,ri,r)は、上述した受信電力pの関数として以下の式(2)により表される。
信号対干渉比Qは、対象のUE(i)に対して送信されるユーザデータ量の送信速度などに影響する。HeNB300のセルエリアを含むeNB200のセルエリア内に位置する全UEについて、式(2)を用いて信号対干渉比Qを算出することが出来る。
式(2)に示される信号対干渉比Qを用いると、HeNB300のセルエリアを含む半径RのeNB200のセルエリア内に位置する全UEに対して送信される平均ユーザーデータ量E(r)は、以下の式(3)により表される。
式(3)において、Lは、eNB200と接続中のUE400の数、MはHeNB300と接続中のUE400の数を夫々示す。Diは、UE(i)に対する平均ユーザデータ量、Djは、UE(j)に対する平均ユーザデータ量を夫々示す。E(r)の増加は、eNB200のセルエリア内において送信される平均ユーザデータ量が増加することを示し、ひいては移動通信システム1における通信効率の向上を示す。他方で、E(r)の減少は、eNB200のセルエリア内において送信される平均ユーザデータ量がHeNB300からの送信電波による干渉の影響などにより減少することを示し、ひいては移動通信システム1における通信効率の悪化を示す。
上述のように、フェムトセル制御処理においては、所定の電力値を目標値として、HeNB300の送信電力の変更が行われる。かかる送信電力の変更により、HeNB300のセル半径rは変化する。以下、変化後のHeNB300のセル半径をr’と表記する。また、HeNB300のセル半径をrからr’に変更することで、HeNB300のセルエリアに位置するUE400の数が変更する。具体的には、セル半径が増加する場合、HeNB300のセルエリアに位置するUE400の数が増加し、セル半径が減少する場合、HeNB300のセルエリアに位置するUE400の数が減少する。
フェムトセル制御処理によるHeNB300のセルエリア半径の変更に応じて、HeNB300の変更後のセルエリアにおいて、HeNB300と接続するUE400の増加数をmとする。この場合、HeNB300のセルエリアと重複して配置されるeNB200のセルエリアでは、該セルエリアの変更において、eNB200と接続するUE400がm個減少すると考えられる。このとき、セルエリア変更後のHeNB300が送信する接続中のUE400への平均ユーザデータ量E(r’)は、以下の式(5)により表される。
制御装置100の演算部113は、フェムトセル制御処理後の平均ユーザデータ量を予測し、該予測値に基づいて、HeNB300に対するフェムトセル制御処理の実施内容を決定する。具体的には、フェムトセル制御処理後のE(r’)が処理前のE(r)より大きくなる場合(つまり、E(r’)≧E(r)となる場合)、演算部113は、HeNB300の送信電力を増加するフェムトセル制御処理を実施する。他方で、フェムトセル制御処理後のE(r’)が処理前のE(r)より小さくなる場合(つまり、E(r’)<E(r)となる場合)、演算部113は、HeNB300の送信電力を減少するフェムトセル制御処理を実施する。また、送信ユーザデータ量に応じて各UE400への無線リソースの割り当てを指示する。
(3−1)eNB200と接続中のUE400に係る処理例
図15乃至図17を参照して、eNB200のセルに在圏するUE400がHeNB300にハンドオーバする際のフェムトセル制御処理の開始時の処理について説明する。図15は、ハンドオーバ元となるeNB200のハンドオーバ処理部214によるフェムトセル制御処理を開始するための判定処理の流れを示すフローチャートである。セル内に在圏するUE400からハンドオーバ要求メッセージを受信したeNB200のハンドオーバ処理部214は、ハンドオーバ処理部214において、以下に説明する態様でフェムトセル制御処理の実施の判断を行う。尚、eNB200とHeNB300とは、以下に説明される計算に用いられるeNB200の送信電力Pm並びにHeNB300の最大送信電力Pmax及び最小送信電力Pmin、又は上述した各値の算出に用いられるeNB200のセル半径R及びHeNB300のセル半径r等の値を例えば定期的に通知し合うことで情報の交換を行っている。
図15乃至図17を参照して、eNB200のセルに在圏するUE400がHeNB300にハンドオーバする際のフェムトセル制御処理の開始時の処理について説明する。図15は、ハンドオーバ元となるeNB200のハンドオーバ処理部214によるフェムトセル制御処理を開始するための判定処理の流れを示すフローチャートである。セル内に在圏するUE400からハンドオーバ要求メッセージを受信したeNB200のハンドオーバ処理部214は、ハンドオーバ処理部214において、以下に説明する態様でフェムトセル制御処理の実施の判断を行う。尚、eNB200とHeNB300とは、以下に説明される計算に用いられるeNB200の送信電力Pm並びにHeNB300の最大送信電力Pmax及び最小送信電力Pmin、又は上述した各値の算出に用いられるeNB200のセル半径R及びHeNB300のセル半径r等の値を例えば定期的に通知し合うことで情報の交換を行っている。
ハンドオーバ処理部214は、当該eNB200の送信電力Pmと、ハンドオーバ先のHeNB300の送信電力Phとを比較する(ステップS201)。該判定により、ハンドオーバ処理部214は、フェムトセル制御処理に進むか否かの判断を行う。
HeNB300の送信電力PhがeNB200の送信電力Pm以上である場合(ステップS201:Yes)、ハンドオーバ処理部214は、UE400についてフェムトセル制御処理の実施が不要であると判定し、処理を終了する。
HeNB300の送信電力PhがeNB200の送信電力Pm未満である場合(ステップS201:No)、ハンドオーバ処理部214は、フェムトセル制御処理を実施する際のHeNB300において増加可能な送信電力の確認を行う。
具体的には、ハンドオーバ処理部214は、HeNB300の送信電力Phに対して所定の電力値ΔPを加算したPh+ΔPと、HeNB300の最大送信電力Pmaxとを比較することで、増加可能な送信電力がPh+ΔPであるかPmaxであるかを確認する(ステップS202)。ΔPとは、HeNB300の最大送信電力Pmaxと最小送信電力Pminとの差より決定される、所定の電力値である。具体的には、ΔP=(Pmax−Pmin)/nとして算出される。このときのnは、HeNB300の送信電力の増加または減少する最小送信電力を決定するためのシステム的なパラメータであり、適宜設定されるものであってよい。
HeNB300の送信電力Ph+ΔPがHeNB300の最大送信電力Pmax未満である場合(ステップS202:No)、ハンドオーバ処理部214は、フェムトセル制御処理でのHeNB300における送信電力の目標値をPh+ΔPに設定する。次にハンドオーバ処理部214は、HeNB300の送信電力Ph+ΔPと、当該eNB200の送信電力Pmとを比較する(ステップS203)。Ph+ΔPがPm以上である場合(ステップS203:Yes)、ハンドオーバ処理部214は、フェムトセル制御処理を実施可能と判断する。
また、HeNB300の送信電力Ph+ΔPがHeNB300の最大送信電力Pmax以上である場合(ステップS202:Yes)、ハンドオーバ処理部214は、フェムトセル制御処理でのHeNB300における送信電力の目標値をPmaxに設定する。次にハンドオーバ処理部214は、HeNB300の最大送信電力Pmaxと、当該eNB200の送信電力Pmとを比較する(ステップS204)。PmaxがPm以上である場合(ステップS203:Yes)、ハンドオーバ処理部214は、フェムトセル制御処理を実施可能と判断する。
ハンドオーバ処理部214は、フェムトセル制御処理を実施可能と判断する場合(ステップS203:Yes、又はステップS204:Yes)、決定された送信電力の目標値を用いてHeNB300のフェムトセル制御処理を行う(ステップS205)。尚、ハンドオーバ処理部214は、フェムトセル制御処理を実施不可能と判断する場合(ステップS201:Yes、ステップS203:No、又はステップS204:No)、処理を終了する。
eNB200と接続中のUE400において測定されるeNB200からの受信電力pm及びHeNB300からの受信電力phの関係について、図16のグラフに例を示す。ここで、eNB200の送信電力がPmのとき、UE400おいて測定されるeNB200からの受信電力をpmであるとする。また、HeNB300の送信電力がPhのとき、UE400おいて測定されるHeNB300からの受信電力をphとする。eNB200からの受信電力pm及びHeNB300からの受信電力phは、上述した式(1)に基づいて算出される。また、HeNB300の送信電力をΔP分増加又は減少する場合、UE400において測定されるHeNB300からの受信電力の増加又は減少量をδpで表現する。例えば、HeNB300の送信電力がPhからPh+ΔPに増加する場合、UE400において測定されるHeNB300からの受信電力はphからph+δpとなる。
上述のフェムトセル制御開始時の処理において、フェムトセル制御処理が実施可能であると判定される場合(図15、ステップS203:Yes、又はステップS204:Yes)、ハンドオーバ元のeNB200は、制御装置100に対して、フェムトセル変更要求メッセージM11を送信する。フェムトセル変更要求メッセージM11を受信した制御装置100は、演算部113及びハンドオーバ判定部114において、フェムトセル制御処理の態様とハンドオーバの実施の有無とを決定する。図17は、制御装置100によるフェムトセル制御処理の流れを示すフローチャートである。
ハンドオーバ情報応答メッセージM22を受信した制御装置100の演算部113は、eNB200及びHeNB300に係る情報、並びにハンドオーバに係るUE400の現在位置に基づいて、上述の式(3)を用いて現時点での平均ユーザデータ量E(r)を算出する。また、演算部113は、HeNB300の送信電力をPh+ΔP及びPmaxのいずれかのうち、上述の処理により決定された送信電力の目標値に変更した際の平均ユーザデータ量E(r’)を算出する。HeNB300の送信電力に応じたHeNB300のセル半径r’をr1と記載する。演算部113は、算出されたE(r)とE(r1)との比較を行う(ステップS301)。
E(r1)がE(r)以上となる場合(ステップS301:Yes)、演算部113は、HeNB300に対して、送信電力Phを目標値Ph+ΔP又はPmaxまで増加させる送信電力変更要求メッセージM31を送信する。送信電力変更要求メッセージM31を受信したHeNB300は、メッセージ内に含まれる送信電力情報に応じて、送信電力Phを増加させ、セルエリアを拡大する(ステップS302)。その後、制御装置100は、eNB200又はHeNB300に対して、UE400についてeNB200からHeNB300に対するハンドオーバ処理を行うためのフェムトセル変更応答M12を送信する。フェムトセル変更応答M12を受信したeNB200又はHeNB300は、メッセージ内に含まれるハンドオーバ先のeNB/HeNB上方に応じて、UE400のハンドオーバ処理を行う(ステップS303)。
他方で、E(r1)がE(r)より小さくなる場合(ステップS301:No)、ハンドオーバ判定部114は、UE400についてHeNB300へのハンドオーバを実施せず、eNB200との接続を継続するよう判断する。また、演算部113は、HeNB300のセルエリアを縮小する処理へ進む。演算部113は、HeNB300の送信電力をΔP減少する場合の減少後の送信電力Ph−ΔPに応じたセル半径r2に基づく平均ユーザデータ量E(r2)を算出し、E(r)とE(r2)との比較を行う(ステップS304)。比較後、E(r2)がE(r)以上となる場合(ステップS304:Yes)、演算部113は、HeNB300に対して、セルエリアを縮小させるために、送信電力Phを目標値Ph−ΔPまで減少させる送信電力変更要求メッセージM31を送信する(ステップS305)。E(r2)がE(r)より小さく場合(ステップS304:No)、演算部113は、HeNB300の送信電力の変更の指示を行わずに、処理を終了する。
(3−2)HeNB300と接続中のUE400に係る処理例
図18乃至図20を参照して、HeNB300のセルに在圏するUE400がeNB200にハンドオーバする際のフェムトセル制御処理の開始時の処理について説明する。図18は、ハンドオーバ元となるHeNB300のハンドオーバ処理部214によるフェムトセル制御処理を開始するための判定処理の流れを示すフローチャートである。セル内に在圏するUE400からハンドオーバ要求メッセージを受信したHeNB300のハンドオーバ処理部214は、ハンドオーバ処理部214において、以下に説明する態様でフェムトセル制御処理の実施の判断を行う。尚、eNB200とHeNB300とは、以下に説明される計算に用いられるeNB200の送信電力Pm並びにHeNB300の最大送信電力Pmax及び最小送信電力Pmin、又は上述した各値の算出に用いられるeNB200のセル半径R及びHeNB300のセル半径r等の値を例えば定期的に通知し合うことで情報の交換を行っている。
図18乃至図20を参照して、HeNB300のセルに在圏するUE400がeNB200にハンドオーバする際のフェムトセル制御処理の開始時の処理について説明する。図18は、ハンドオーバ元となるHeNB300のハンドオーバ処理部214によるフェムトセル制御処理を開始するための判定処理の流れを示すフローチャートである。セル内に在圏するUE400からハンドオーバ要求メッセージを受信したHeNB300のハンドオーバ処理部214は、ハンドオーバ処理部214において、以下に説明する態様でフェムトセル制御処理の実施の判断を行う。尚、eNB200とHeNB300とは、以下に説明される計算に用いられるeNB200の送信電力Pm並びにHeNB300の最大送信電力Pmax及び最小送信電力Pmin、又は上述した各値の算出に用いられるeNB200のセル半径R及びHeNB300のセル半径r等の値を例えば定期的に通知し合うことで情報の交換を行っている。
HeNB300のハンドオーバ処理部214は、当該HeNB300の送信電力Phと、ハンドオーバ先のeNB200の送信電力Pmとを比較する(ステップS401)。該判定により、ハンドオーバ処理部214は、フェムトセル制御処理に進むか否かの判断を行う。
HeNB300の送信電力PhがeNB200の送信電力Pm以下である場合(ステップS401:Yes)、ハンドオーバ処理部214は、UE400についてフェムトセル制御処理の実施が不要であると判定し、処理を終了する。
HeNB300の送信電力PhがeNB200の送信電力Pmを上回る場合(ステップS401:No)、ハンドオーバ処理部214は、フェムトセル制御処理を実施する際のHeNB300において増加可能な送信電力の確認を行う。
具体的には、ハンドオーバ処理部214は、HeNB300の送信電力Phに対して所定の電力値ΔPを加算したPh+ΔPと、HeNB300の最小送信電力Pminとを比較することで、増加可能な送信電力がPh+ΔPであるかPminであるかを確認する(ステップS402)。ΔPとは、上述のΔPと同様に、HeNB300の最大送信電力Pmaxと最小送信電力Pminとの差より決定される、所定の電力値である。
HeNB300の送信電力Ph+ΔPがHeNB300の最小送信電力Pminを上回る場合(ステップS402:No)、ハンドオーバ処理部214は、フェムトセル制御処理でのHeNB300における送信電力の目標値をPh+ΔPに設定する。次にハンドオーバ処理部214は、HeNB300の送信電力Phに対して電力値ΔPを減算したPh−ΔPと、当該eNB200の送信電力Pmとを比較する(ステップS403)。Ph−ΔPがPmin以下である場合(ステップS403:Yes)、ハンドオーバ処理部214は、フェムトセル制御処理を実施可能と判断する。
また、HeNB300の送信電力Ph+ΔPがHeNB300の最小送信電力Pmin以下である場合(ステップS402:Yes)、ハンドオーバ処理部214は、フェムトセル制御処理でのHeNB300における送信電力の目標値をPminに設定する。次にハンドオーバ処理部214は、HeNB300の最小送信電力Pminと、当該eNB200の送信電力Pmとを比較する(ステップS404)。PminがPm以下である場合(ステップS404:Yes)、ハンドオーバ処理部214は、フェムトセル制御処理を実施可能と判断する。
ハンドオーバ処理部214は、フェムトセル制御処理を実施可能と判断する場合(つまり、ステップS403:Yes、又はステップS404:Yes)、決定された送信電力の目標値を用いてHeNB300のフェムトセル制御処理を行う(ステップS405)。尚、ハンドオーバ処理部214は、フェムトセル制御処理を実施不可能と判断する場合(つまり、ステップS401:Yes、ステップS403:No、又はステップS404:No)、処理を終了する。
HeNB300と接続中のUE400において測定されるeNB200からの受信電力pm及びHeNB300からの受信電力phの関係について、図19のグラフに例を示す。図19では、図16と同様に。eNB200の送信電力がPmのとき、UE400おいて測定されるeNB200からの受信電力をpmと記載している。また、HeNB300の送信電力がPhのとき、UE400おいて測定されるHeNB300からの受信電力をphと記載している。また、HeNB300の送信電力をΔP分増加又は減少する場合、UE400において測定されるHeNB300からの受信電力の増加又は減少量をδpと記載している。
上述のフェムトセル制御開始時の処理において、フェムトセル制御処理が実施可能であると判定される場合(図18、ステップS403:Yes、又はステップS404:Yes)、ハンドオーバ元のHeNB300は、制御装置100に対して、フェムトセル変更要求メッセージM11を送信する。フェムトセル変更要求メッセージM11を受信した制御装置100は、演算部113及びハンドオーバ判定部114において、フェムトセル制御処理の態様とハンドオーバの実施の有無とを決定する。図20は、制御装置100によるフェムトセル制御処理の流れを示すフローチャートである。
HeNB300からハンドオーバ情報応答メッセージM22を受信した制御装置100の演算部113は、eNB200及びHeNB300に係る情報、並びにハンドオーバに係るUE400の現在位置に基づいて、上述の式(3)を用いて現時点での平均ユーザデータ量E(r)を算出する。また、演算部113は、HeNB300の送信電力をPh+ΔP及びPminのいずれかのうち、上述の処理により決定された送信電力の目標値に変更した際の平均ユーザデータ量E(r’)を算出する。変更後の送信電力に応じたHeNB300のセル半径r’をr1と記載する。演算部113は、算出されたE(r)とE(r1)との比較を行う(ステップS501)。
E(r1)がE(r)以上となる場合(ステップS501:Yes)、ハンドオーバ判定部114は、UE400についてeNB200へのハンドオーバを実施せず、HeNB300との接続を継続するよう判断する。また、演算部113は、HeNB300に対して、セルエリアを拡大させるために、送信電力Phを目標値Ph+ΔP又はPmaxまで増加させる送信電力変更要求メッセージM31を送信する(ステップS502)。
他方で、E(r1)がE(r)より小さくなる場合(ステップS501:No)、演算部113は、HeNB300のセルエリアを縮小する処理へ進む。演算部113は、HeNB300の送信電力をΔP減少する場合の減少後の送信電力Ph−ΔPに応じたセル半径r2に基づく平均ユーザデータ量E(r2)を算出し、E(r)とE(r2)との比較を行う(ステップS503)。比較後、E(r2)がE(r)以上となる場合(ステップS503:Yes)、演算部113は、HeNB300に対して、セルエリアを縮小させるために、送信電力Phを目標値Ph−ΔPまで減少させる送信電力変更要求メッセージM31を送信する(ステップS504)。その後、ハンドオーバ判定部114は、UE400について、HeNB300からeNB200に対するハンドオーバ処理を行う(ステップS505)。
E(r2)がE(r)より小さく場合(ステップS503:No)、演算部113は、HeNB300の送信電力の変更の指示を行わずに、ハンドオーバ判定部114は、UE400について、HeNB300からeNB200に対するハンドオーバ処理を行う(ステップS505)。
(4)効果の説明
以上、説明したように、制御装置100は、UE400のハンドオーバ処理に際して、HeNB300のセルエリアを含むeNB200のセルエリア内に位置する全UE400に対して送信される平均ユーザデータ量に係る演算を行う。そして、制御装置100は、演算結果に応じて、HeNB300の送信電力Phを変更するフェムトセル制御処理を実施する。
以上、説明したように、制御装置100は、UE400のハンドオーバ処理に際して、HeNB300のセルエリアを含むeNB200のセルエリア内に位置する全UE400に対して送信される平均ユーザデータ量に係る演算を行う。そして、制御装置100は、演算結果に応じて、HeNB300の送信電力Phを変更するフェムトセル制御処理を実施する。
HeNB300の送信電力Phを変更することで、HeNB300のセルエリアの半径rもまた変更される。具体的には、送信電力Phが増加することで、HeNB300のセルエリアの半径rが拡大し、送信電力Phが減少することで、HeNB300のセルエリアの半径rが縮小する。このようなHeNB300のセルエリアの半径rの変化について、図21及び図22に例を示す。
例えば、制御装置100は、eNB200と接続中のUE(i)がHeNB300に対してハンドオーバする際に、HeNB300の送信電力Phを増加する制御を行った場合の平均ユーザデータ量について、変更前の値E(r)と変更後の値E(r1)との比較を行う。制御装置100は、変更後の平均ユーザデータ量E(r1)が、変更前の値E(r)以上と予測される場合に、HeNB300の送信電力Phを増加するフェムトセル制御処理を実施する。このため、eNB200と接続中のあるUE(i)がHeNB300に対してハンドオーバするにあたって、他のUE400に対する与干渉を増加することなく、ハンドオーバ処理をより確実に実現可能となる。
他方で、制御装置100は、変更後の平均ユーザデータ量E(r1)が、変更前の値E(r)未満と予測される場合には、UE(i)についてハンドオーバを実施せず、且つHeNB300の送信電力Phを増加する制御を実施しない。このとき、制御装置100は、HeNB300の送信電力Phを減少する制御を行った場合の平均ユーザデータ量E(r2)と変更前の値E(r)との比較を行う。変更後の平均ユーザデータ量E(r2)が変更前の値E(r)以上と予測される場合に、制御装置100は、HeNB300の送信電力を減少する制御を行う。このため、eNB200と接続中のUE(i)がHeNB300に対するハンドオーバに失敗した場合、eNB200との接続を継続するにあたって、他のUE400に対する与干渉を増加することなく、HeNB300からの送信電波による与干渉を低減することが出来る。
上述のフェムトセル制御処理によれば、HeNB300と接続中のUE400がeNB200にハンドオーバする際についても同様の効果が得られる。
例えば、制御装置100は、HeNB300と接続中のUE(j)がeNB200に対してハンドオーバする際に、HeNB300の送信電力Phを増加する制御を行った場合の平均ユーザデータ量について、変更前の値E(r)と変更後の値E(r1)との比較を行う。制御装置100は、変更後の平均ユーザデータ量E(r1)が、変更前の値E(r)以上となる場合に、HeNB300の送信電力Phを増加するフェムトセル制御処理を実施する。このとき、平均ユーザデータ量の予測値に増加が見られることから、eNB200のセルエリア内に位置する他のUE400に対する与干渉の影響を増加することなく、HeNB300の送信電力Phの増加を行うことが出来る。また、HeNB300の送信電力Phを増加することで、ハンドオーバ処理に係るUE400におけるHeNB300からの受信電力が増加するため、eNB200へのハンドオーバが不要となる。このため、ハンドオーバ処理自体は終了される。従って、UE400のHeNB300との接続を好適に維持可能となり、比較的多数のUE400と接続することが求められるeNB200の無線リソースの効率的な活用が見込まれる。尚、該ハンドオーバ処理に係るUE400が更にセルエッジ方向に移動することなどにより、HeNB300からの受信電力の低下が観測される場合、該UE400のハンドオーバの実施の有無についての検討が行われる。
他方で、制御装置100は、変更後の平均ユーザデータ量E(r1)が、変更前の値E(r)未満と予測される場合には、HeNB300の送信電力Phを増加する制御を実施しない。このとき、制御装置100は、HeNB300の送信電力Phを減少する制御を行った場合の平均ユーザデータ量E(r2)と変更前の値E(r)との比較を行う。変更後の平均ユーザデータ量E(r2)が変更前の値E(r)以上と予測される場合に、制御装置100は、HeNB300の送信電力を減少する制御を行う。その後、UE(j)について、eNB200へのハンドオーバを行う。このため、HeNB300と接続中のあるUE(j)がeNB200に対してハンドオーバした後に、HeNB300からの送信電波によるUE(j)への与干渉の影響を抑制することが出来る。このとき、平均ユーザデータ量の予測値に増加が見られることから、他のUE400に対する与干渉についても増加が生じない。
また、変更後の平均ユーザデータ量E(r2)が変更前の値E(r)より小さくなると予測される場合には、制御装置100は、HeNB300の送信電力Phを減少させる制御を行わない。
尚、上述の例では、フェムトセル制御処理の前後におけるeNB200のセルエリア内に位置する全UE400に対して送信される平均ユーザデータ量E(r)について、予測される変化に基づき、フェムトセル制御処理の実施の有無及びその態様が決定される。式(3)に示されるように、平均ユーザデータ量E(r)は、個々のUE400に対するeNB200及びHeNB300からの信号対干渉比Q(Ri,R,ri,r)の関数として表される。そこで、制御装置100の演算部113は、フェムトセル制御処理の実施前後における平均ユーザデータ量E(r)の代わりに、全UE400における信号対干渉比Qに基づき、フェムトセル制御処理の実施の有無及びその態様を決定してもよい。例えば、HeNB300の送信電力Phが増加する場合のeNB200のセルエリア内に位置する全UE400における平均信号対干渉比に増加が見られる場合、かかる送信電力の増加によりUE400への与干渉の影響は増加していないと考えられる。
式(1)乃至式(3)に示されるように、実施例において、UE400におけるeNB200又はHeNB300からの受信電力、信号対干渉比及び送信されるユーザデータ量は、UE400とeNB200又はHeNB300との距離の関数として表される。従って、制御装置100がUE400の位置情報が正確に把握していない状態で、フェムトセル制御処理を実施する場合、平均ユーザデータ量E(r)の算出精度が劣化し、与干渉の増加を招く制御を実施してしまう可能性がある。
制御装置100は、UE400から送信されるGPS測定誤差に所定の閾値を設定し、該閾値を上回る測定誤差が観測される場合、平均ユーザデータ量E(r)などの予測値に基づくフェムトセル制御処理や、該測定誤差が観測されるUE400についてのハンドオーバ処理自体を終了してもよい。
図13を参照して説明した例では、ハンドオーバ処理に係るUE400からの位置情報について、観測されるGPS測定誤差が0.1Rより大きい場合、UE400の位置の測定精度が十分高くないと判断して、ハンドオーバ処理を実施不可能と判定している。GPS測定誤差の閾値は、上述したようなセル半径の10%値以外にも、シミュレーション等の何らかの方法により適切な数値に設定されてもよい。
(5)変形動作例
制御装置100が行う変形動作例について説明する。図8を参照して説明した上述の実施例においては、フェムトセル制御処理のために、フェムトセル変更要求メッセージM11を受信した制御装置100は、所定のeNB200及びHeNB300に対してハンドオーバ情報要求メッセージM21を送信する。また、各eNB200及びHeNB300は、該メッセージに応じて、端末位置情報要求及び応答メッセージM41、M42の交換を行った後、ハンドオーバ情報応答メッセージM22を制御装置100に返す。このようなUE400のハンドオーバ処理が輻輳する場合、メッセージの交換のために膨大な情報量の通信が発生する。これにより、移動通信システム1におけるトラヒックに影響が生じることが考えられる。
制御装置100が行う変形動作例について説明する。図8を参照して説明した上述の実施例においては、フェムトセル制御処理のために、フェムトセル変更要求メッセージM11を受信した制御装置100は、所定のeNB200及びHeNB300に対してハンドオーバ情報要求メッセージM21を送信する。また、各eNB200及びHeNB300は、該メッセージに応じて、端末位置情報要求及び応答メッセージM41、M42の交換を行った後、ハンドオーバ情報応答メッセージM22を制御装置100に返す。このようなUE400のハンドオーバ処理が輻輳する場合、メッセージの交換のために膨大な情報量の通信が発生する。これにより、移動通信システム1におけるトラヒックに影響が生じることが考えられる。
変形動作例では、制御装置100は、図8に示されるようにeNB200及びHeNB300からハンドオーバ情報応答メッセージM22を受信した場合、該メッセージの内容と、該メッセージの受信時刻とをメモリ103内のデータベースに格納する。図24は、データベースに格納されるテーブルの一例である。図24(a)は、ハンドオーバ情報応答メッセージM22に含まれるUE400についての情報を保存するテーブルの例である。UE400についての情報を保存するテーブルは、各UE400について、位置情報、平均ユーザデータ量、通信中のeNB200の特定情報及び受信時刻を格納する。図24(b)は、ハンドオーバ情報応答メッセージM22に含まれる該メッセージの送信元のeNB200又はHeNB300についての情報を格納するテーブルの例である。eNB200又はHeNB300についての情報を格納するテーブルは、各eNB200又はHeNB300の位置情報、送信電力及びHeNB300について、セルエリアが重複する、言い換えれば上位に位置するeNB200を特定する情報を格納する。
変形動作例では、制御装置100は、フェムトセル変更要求メッセージM11を受信した場合、ハンドオーバ情報要求メッセージM22を送信する代わりに、メモリ103内のデータベースを参照し、ハンドオーバに利用可能な情報が存在するか否かの確認を行う。尚、制御装置100は、データベースに格納されるメッセージの受信時刻から所定の期間のハンドオーバ処理について該メッセージを利用可能と判断する。
ハンドオーバ処理に利用可能な情報が存在する場合、該情報を基にハンドオーバ処理及びフェムトセル制御処理を行う。このときのシーケンスを図25に示す。制御装置100の演算部113及びハンドオーバ判定部114は、メモリ103に格納されるデータベースから、UE400の位置情報及びユーザデータ量などを抽出し、上述した実施例と同様の処理を行う。
他方で、ハンドオーバ処理に利用可能な情報が存在しない場合、制御装置100は、上述の実施例と同様にeNB200及びHeNB300に対してハンドオーバ情報要求メッセージM21を送信する。その後、ハンドオーバ情報要求メッセージM21に対するハンドオーバ情報応答メッセージM22を受信した場合、制御装置100は、該メッセージに含まれる情報を基にメモリ103内のデータベースを更新する。
変形例の動作によれば、制御装置100は、必ずしも個別のハンドオーバ処理についてハンドオーバ情報要求メッセージM21及び応答メッセージM22を行うことなく、ハンドオーバ処理に用いる情報を取得することが出来る。複数のUE400からのハンドオーバ要求が輻輳する場合については、あるUE400のハンドオーバ処理について取得し、メモリ103内に格納した情報を用いて他のUE400のハンドオーバ処理を実施可能となり、トラヒック量の大きな抑制を実現出来る。
尚、更なる変形例として、制御装置100は、周期的にeNB200及びHeNB300からハンドオーバ処理にかかる情報の通知を受けてもよい。
この態様では、制御装置100は、eNB200及び該eNB200のセルエリアに重複して配置されるセルの全HeNB300に対して、所定の周期でハンドオーバ情報要求メッセージM21を送信する。ハンドオーバ情報要求メッセージM21を受信したeNB200及びHeNB300は、UE400について端末位置情報要求メッセージM41を送信することで、情報を収集する。eNB200及びHeNB300は、該収集された情報を含むハンドオーバ情報応答メッセージM22を作成し、制御装置100へ送信する。制御装置100は、ハンドオーバ情報応答メッセージM22を受信した場合、該メッセージに含まれる情報をメモリ103内のデータベースに格納する。
その後、制御装置100は、eNB200又はHeNB300からフェムトセル変更要求メッセージM11を受信した場合、ハンドオーバ情報要求メッセージM21を送信する代わりに、メモリ103に格納されるデータベースを参照して、保存されているハンドオーバに係る情報を取り出す。このときのシーケンスを図26に示す。
この態様によれば、制御装置100は、例えば、格納される情報の有効期限に応じた所定の周期で、ハンドオーバ情報要求メッセージM21をeNB200及びHeNB300に対して送信することで、情報を再収集し、データベースの更新を行う。従って、UE400のハンドオーバ要求に際して、ハンドオーバ情報要求メッセージM21を送信することなく、好適にメモリ103内のデータベースに格納される情報を用いてハンドオーバ処理を実施することが出来る。
本発明は、上述した実施例に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う制御装置及び制御方法並びに移動通信システムなどもまた本発明の技術的範囲に含まれるものである。
1 移動通信システム
100 制御装置、
101 LSI、
102 CPU、
103 メモリ、
111 受信部、
112 情報収集部、
113 演算部、
114 ハンドオーバ判定部、
115 送信部、
200 eNB、
300 HeNB。
100 制御装置、
101 LSI、
102 CPU、
103 メモリ、
111 受信部、
112 情報収集部、
113 演算部、
114 ハンドオーバ判定部、
115 送信部、
200 eNB、
300 HeNB。
Claims (9)
- 第1無線区間を形成して移動端末と通信する第1基地局と、前記第1無線区間内に重複し、且つ前記第1無線区間より相対的に送信電力が低い第2無線区間を形成して前記移動端末と通信する第2基地局との動作を制御する制御装置であって、
前記移動端末からの接続先の変更要求に対して、接続の可否を判定する接続変更判定部と、
前記第1無線区間に位置する全ての前記移動端末について、前記第1基地局又は前記第2基地局からの通信状況を測定する測定部と、
前記第2基地局の送信電力の変更値を決定する変更値決定部と、
前記変更値に基づいて前記第2基地局の送信電力を変更した後の前記通信状況を予測する予測部と、
前記変更値に基づいて前記第2基地局の送信電力を変更する電力変更部と
を備え、
前記電力変更部は、前記移動端末が前記第1基地局及び前記第2基地局の間で接続先を変更する際に、前記通信状況の測定結果及び予測結果に応じて、前記第2基地局の送信電力を変更することを特徴とする制御装置。 - 前記変更値決定部は、前記変更値を変更前の第2基地局の送信電力より高くなるよう決定し、
前記電力変更部は、前記移動端末が前記第1基地局から前記第2基地局に接続先を変更する際に、前記通信状況の予測結果が測定結果と同等以上となる場合、前記変更値に基づいて前記第2基地局の送信電力を増加することを特徴とする請求項1に記載の制御装置。 - 前記変更値決定部は、前記変更値を変更前の第2基地局の送信電力より低くなるよう決定し、
前記電力変更部は、前記移動端末が前記第1基地局から前記第2基地局に接続先を変更する際に、前記移動端末の接続先の変更が不可であると判定され、且つ前記通信状況の予測結果が測定結果と同等以上となる場合、前記変更値に基づいて前記第2基地局の送信電力を低減することを特徴とする請求項1に記載の制御装置。 - 前記変更値決定部は、前記変更値を変更前の第2基地局の送信電力より低くなるよう決定し、
前記電力変更部は、前記移動端末が前記第2基地局から前記第1基地局に接続先を変更する際に、前記通信状況の予測結果が測定結果と同等以上となる場合、前記変更値に基づいて前記第2基地局の送信電力を低減することを特徴とする請求項1に記載の制御装置。 - 前記変更値決定部は、前記変更値を変更前の第2基地局の送信電力より高くなるよう決定し、
前記電力変更部は、前記移動端末が前記第2基地局から前記第1基地局に接続先を変更する際に、前記移動端末の接続先の変更が不可であると判定され、且つ前記通信状況の予測結果が測定結果と同等以上となる場合、前記変更値に基づいて前記第2基地局の送信電力を増加することを特徴とする請求項1に記載の制御装置。 - 前記通信状況は、前記第1無線区間に位置する全ての前記移動端末に対する前記第2基地局からの与干渉を示す情報であることを示す請求項1に記載の制御装置。
- 前記通信状況は、前記第1無線区間に位置する全ての前記移動端末に対する前記第1基地局又は前記第2基地局からの通信量を示す情報であることを示す請求項1に記載の制御装置。
- 第1無線区間を形成して移動端末と通信する第1基地局と、前記第1無線区間内に重複し、且つ前記第1無線区間より相対的に送信電力が低い第2無線区間を形成して前記移動端末と通信する第2基地局との動作を制御する制御方法であって、
前記移動端末からの接続先の変更要求に対して、接続の可否を判定する接続変更判定工程と、
前記第1無線区間に位置する全ての前記移動端末について、前記第1基地局又は前記第2基地局からの通信状況を測定する測定工程と、
前記第2基地局の送信電力の変更値を決定する変更値決定工程と、
前記変更値に基づいて前記第2基地局の送信電力を変更した後の前記通信状況を予測する予測工程と、
前記変更値に基づいて前記第2基地局の送信電力を変更する電力変更工程と
を備え、
前記電力変更工程は、前記移動端末が前記第1基地局及び前記第2基地局の間で接続先を変更する際に、前記通信状況の測定結果及び予測結果に応じて、前記第2基地局の送信電力を変更することを特徴とする制御方法。 - 第1無線区間を形成して移動端末と通信する第1基地局と、前記第1無線区間内に重複し、且つ前記第1無線区間より相対的に送信電力が低い第2無線区間を形成して前記移動端末と通信する第2基地局と、制御装置とを含む移動通信システムであって、
前記制御装置は、
前記移動端末からの接続先の変更要求に対して、接続の可否を判定する接続変更判定部と、
前記第1無線区間に位置する全ての前記移動端末について、前記第1基地局又は前記第2基地局からの通信状況を測定する測定部と、
前記第2基地局の送信電力の変更値を決定する変更値決定部と、
前記変更値に基づいて前記第2基地局の送信電力を変更した後の前記通信状況を予測する予測部と、
前記変更値に基づいて前記第2基地局の送信電力を変更する電力変更部と
を備え、
前記電力変更部は、前記移動端末が前記第1基地局及び前記第2基地局の間で接続先を変更する際に、前記通信状況の測定結果及び予測結果に応じて、前記第2基地局の送信電力を変更することを特徴とする移動通信システム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2010/064950 WO2012029143A1 (ja) | 2010-09-01 | 2010-09-01 | 制御装置及び制御方法並びに移動通信システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2012029143A1 JPWO2012029143A1 (ja) | 2013-10-28 |
| JP5534016B2 true JP5534016B2 (ja) | 2014-06-25 |
Family
ID=45772279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012531614A Expired - Fee Related JP5534016B2 (ja) | 2010-09-01 | 2010-09-01 | 制御装置及び制御方法並びに移動通信システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9066274B2 (ja) |
| EP (1) | EP2613587B1 (ja) |
| JP (1) | JP5534016B2 (ja) |
| WO (1) | WO2012029143A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5928687B2 (ja) * | 2011-12-13 | 2016-06-01 | 日本電気株式会社 | 無線パラメータ制御システム、無線パラメータ制御装置、無線基地局、無線パラメータ制御方法及びプログラム |
| EP2892273B1 (en) * | 2012-08-29 | 2018-04-18 | NEC Corporation | Communication system, base station, and communication method |
| US9357507B2 (en) * | 2012-09-13 | 2016-05-31 | Qualcomm Incorporated | Centralized management for pilot pollution mitigation in small cell networks |
| US9578605B2 (en) * | 2013-09-27 | 2017-02-21 | Parallel Wireless, Inc. | Adjusting transmit power across a network |
| US10285097B2 (en) * | 2017-02-16 | 2019-05-07 | Parallel Wireless, Inc. | Sinter and intrasearch beacon |
| WO2023276196A1 (ja) * | 2021-07-02 | 2023-01-05 | 日本電気株式会社 | 無線通信システム、制御装置、制御方法、プログラム及び記録媒体 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010045547A (ja) * | 2008-08-11 | 2010-02-25 | Ntt Docomo Inc | ユーザ装置、無線基地局及び方法 |
| JP2010062951A (ja) * | 2008-09-04 | 2010-03-18 | Ntt Docomo Inc | 基地局及び移動通信方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6473624B1 (en) * | 2000-03-21 | 2002-10-29 | Telefonaktiebolaget Lm Ericsson (Publ) | Determining a reference power level for diversity handover base stations |
| JP2002077040A (ja) * | 2000-08-29 | 2002-03-15 | Matsushita Electric Ind Co Ltd | 基地局装置、制御局装置及び送信電力制御方法 |
| JP4376515B2 (ja) * | 2000-09-20 | 2009-12-02 | 富士通株式会社 | 移動体通信システム |
| JP4008301B2 (ja) * | 2002-08-01 | 2007-11-14 | 株式会社エヌ・ティ・ティ・ドコモ | 基地局接続方法、無線ネットワーク制御装置及び移動局 |
| JP2004235839A (ja) | 2003-01-29 | 2004-08-19 | Mitsubishi Electric Corp | 固定無線アクセスシステム |
| US7142861B2 (en) * | 2003-12-12 | 2006-11-28 | Telefonaktiebolaget Lm Ericsson (Publ) | Mobile communications in a hierarchical cell structure |
| US20070042799A1 (en) * | 2005-06-03 | 2007-02-22 | Samsung Electronics Co., Ltd. | Auto adaptive technique to provide adequate coverage and mitigate RF interference |
| JP4800143B2 (ja) * | 2006-08-07 | 2011-10-26 | 株式会社エヌ・ティ・ティ・ドコモ | 無線通信制御装置、無線通信制御システムおよび無線通信制御方法 |
| US7929970B1 (en) * | 2007-12-21 | 2011-04-19 | Sprint Spectrum L.P. | Methods and systems for temporarily modifying a macro-network neighbor list to enable a mobile station to hand off from a macro network to a femto cell |
| GB2456572B (en) | 2008-01-18 | 2012-03-14 | Picochip Designs Ltd | Femtocell device |
| JP5555687B2 (ja) * | 2008-03-25 | 2014-07-23 | マイクロソフト コーポレーション | フェムトセル及びマクロセル間の干渉を低減させる方法及びシステム |
| US8126496B2 (en) * | 2008-05-07 | 2012-02-28 | At&T Mobility Ii Llc | Signaling-triggered power adjustment in a femto cell |
| US20090312024A1 (en) | 2008-06-13 | 2009-12-17 | Fujitsu Limited | Seamless Handover Between Macro Base Stations and Publicly Accessible Femto Base Stations |
| JP5156498B2 (ja) * | 2008-06-18 | 2013-03-06 | 株式会社エヌ・ティ・ティ・ドコモ | 基地局及び移動通信方法 |
| JP5029512B2 (ja) | 2008-06-30 | 2012-09-19 | 富士通株式会社 | 基地局装置、無線通信管理装置および無線通信システム |
| JP5365640B2 (ja) * | 2008-10-27 | 2013-12-11 | 日本電気株式会社 | 基地局、無線通信システム、基地局の制御方法、無線通信方法、および制御プログラム |
| JP5589847B2 (ja) * | 2008-10-27 | 2014-09-17 | 日本電気株式会社 | 基地局、無線通信システム、基地局の制御方法、無線通信方法、および基地局の制御プログラム |
| US8180368B2 (en) * | 2008-11-11 | 2012-05-15 | Trueposition, Inc. | Femto-cell location by direct methods |
| EP2217028B1 (en) * | 2009-02-05 | 2016-04-20 | Mitsubishi Electric R&D Centre Europe B.V. | Method and a device for adjusting the transmission power of signals |
| US8768398B2 (en) * | 2009-04-23 | 2014-07-01 | Qualcomm Incorporated | Measurement aggregation in wireless communications systems |
| US8849263B2 (en) * | 2009-06-19 | 2014-09-30 | Lg Electronics Inc. | Efficient handover execution method of terminal in broadband wireless access system including multiple femto base stations |
| US9084271B2 (en) * | 2009-06-30 | 2015-07-14 | Lg Electronics Inc. | Femto base station and method for managing resource thereof |
| KR101065092B1 (ko) * | 2009-10-16 | 2011-09-16 | 주식회사 팬택 | 네트워크 컨트롤러 및 소형 기지국 |
-
2010
- 2010-09-01 WO PCT/JP2010/064950 patent/WO2012029143A1/ja active Application Filing
- 2010-09-01 JP JP2012531614A patent/JP5534016B2/ja not_active Expired - Fee Related
- 2010-09-01 EP EP10856694.4A patent/EP2613587B1/en not_active Not-in-force
-
2013
- 2013-02-25 US US13/776,078 patent/US9066274B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010045547A (ja) * | 2008-08-11 | 2010-02-25 | Ntt Docomo Inc | ユーザ装置、無線基地局及び方法 |
| JP2010062951A (ja) * | 2008-09-04 | 2010-03-18 | Ntt Docomo Inc | 基地局及び移動通信方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9066274B2 (en) | 2015-06-23 |
| US20130165125A1 (en) | 2013-06-27 |
| EP2613587B1 (en) | 2017-04-26 |
| JPWO2012029143A1 (ja) | 2013-10-28 |
| EP2613587A4 (en) | 2015-01-21 |
| EP2613587A1 (en) | 2013-07-10 |
| WO2012029143A1 (ja) | 2012-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5534016B2 (ja) | 制御装置及び制御方法並びに移動通信システム | |
| JP6662961B2 (ja) | 非セルラーワイヤレスアクセスのためのシステムおよび方法 | |
| KR101878303B1 (ko) | 무선 통신 시스템에서 셀 간 간섭 전력량을 효율적으로 제어하는 방법 및 장치 | |
| EP2829098B1 (en) | Almost blank subframe duty cycle adaptation in heterogeneous networks | |
| CN103493528B (zh) | 通信控制装置以及通信控制方法 | |
| TW201238262A (en) | Wireless communication terminal, wireless communication base station, wireless communication system, and reporting method | |
| JP2010263626A (ja) | 干渉低減方法及び干渉低減装置 | |
| JP2013532913A (ja) | 通信ネットワークにおけるセル選択のための方法及び装置 | |
| JP2008172380A (ja) | 移動通信システムで使用される基地局装置、ユーザ装置及び方法 | |
| WO2013127324A1 (zh) | 一种基站及进行tdd基站上下行子帧配置的方法 | |
| CN103026676A (zh) | 蜂窝系统上行链路中的动态自主资源分配和信道接入 | |
| CN102857970B (zh) | 一种小区间负载平衡的实现方法及装置 | |
| US9668259B2 (en) | Small-scale base station, communication system, and communication method | |
| JP2018500850A (ja) | メッセージ処理方法、ノード装置、及びユーザ機器 | |
| JP2008278263A (ja) | 移動通信システムにおける基地局装置及び方法 | |
| KR20150122111A (ko) | 제어 장치, 대표 기지국 및 기지국 제어 방법 | |
| JP6471755B2 (ja) | 無線基地局、移動局、無線通信システム、無線基地局の制御方法およびプログラム | |
| JP6287851B2 (ja) | 無線リソース設定方法、基地局、無線リソース設定システム及びプログラム | |
| JP2015192252A (ja) | 移動通信システム、通信制御装置、省電力制御方法およびプログラム | |
| CN112205032A (zh) | 基于高度指示处理无线设备到基站的连接的方法 | |
| CN102905327A (zh) | 一种lte通信系统中的切换判决方法 | |
| WO2014136742A1 (ja) | 無線通信システム、無線パラメータ制御方法、ネットワーク管理装置、および無線基地局 | |
| JP5767530B2 (ja) | 無線通信システムおよび通信制御方法 | |
| JPWO2013136797A1 (ja) | 無線基地局装置、lte移動通信システム、モビリティ制御方法 | |
| JP2016163112A (ja) | 通信監視システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5534016 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140414 |
|
| LAPS | Cancellation because of no payment of annual fees |