JP5501622B2 - レーダセンサ前端用の時間二重化の装置及び方法 - Google Patents
レーダセンサ前端用の時間二重化の装置及び方法 Download PDFInfo
- Publication number
- JP5501622B2 JP5501622B2 JP2008549497A JP2008549497A JP5501622B2 JP 5501622 B2 JP5501622 B2 JP 5501622B2 JP 2008549497 A JP2008549497 A JP 2008549497A JP 2008549497 A JP2008549497 A JP 2008549497A JP 5501622 B2 JP5501622 B2 JP 5501622B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- frequency
- signal
- waveform
- radar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 14
- 230000005540 biological transmission Effects 0.000 claims description 47
- 238000005070 sampling Methods 0.000 claims description 20
- 230000004044 response Effects 0.000 claims description 19
- 230000005855 radiation Effects 0.000 claims description 13
- 238000012545 processing Methods 0.000 claims description 12
- 230000008859 change Effects 0.000 claims description 8
- 238000004891 communication Methods 0.000 claims description 2
- 238000001514 detection method Methods 0.000 claims description 2
- 230000000712 assembly Effects 0.000 claims 1
- 238000000429 assembly Methods 0.000 claims 1
- 238000010183 spectrum analysis Methods 0.000 claims 1
- 238000012546 transfer Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 16
- 230000010363 phase shift Effects 0.000 description 13
- 238000013461 design Methods 0.000 description 7
- 238000001228 spectrum Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000000737 periodic effect Effects 0.000 description 5
- 238000005316 response function Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 239000012634 fragment Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000001052 transient effect Effects 0.000 description 3
- 238000003491 array Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
- G01S7/352—Receivers
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
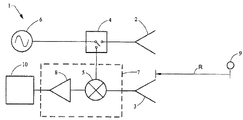
30 波形発生器
32,34 送受信スイッチ
36,60 アンテナ
42 ミキサ
47 増幅器
48 信号プロセッサ
Claims (22)
- 波形発生器、送受信スイッチ及びミキサを具備するレーダであって、
前記送受信スイッチが、送信状態及び受信状態の持続時間の合計の半分より大きい送信状態にあり、
前記送信状態及び前記受信状態の前記持続時間の合計の逆数でサンプリング周波数が与えられ、
前記サンプリング周波数は、前記波形発生器の出力及び受信信号の間の差周波数の2倍より大きいことを特徴とするレーダ。 - 前記波形発生器は、周波数変調連続波(FMCW)信号を生成することを特徴とする請求項1記載のレーダ。
- 前記FMCW信号は、周波数変化の正又は負の時間割合のうち少なくとも一方を有することを特徴とする請求項2記載のレーダ。
- 前記波形発生器の前記出力は、擬似ランダムコードシーケンスにより位相変調されていることを特徴とする請求項1記載のレーダ。
- 前記送受信スイッチは、波形チップ周期の間、少なくとも1回は受信状態にあることを特徴とする請求項4記載のレーダ。
- 前記波形発生器の出力は、前記送受信スイッチが受信状態にあるときに前記ミキサ入力ポートに印加されることを特徴とする請求項1記載のレーダ。
- 前記波形発生器の出力は、前記送受信スイッチが送信状態にあるときにアンテナに印加されることを特徴とする請求項1記載のレーダ。
- 前記レーダは、前記ミキサの出力に接続された信号増幅器をさらに具備し、
該信号増幅器は、出力応答が前記波形発生器の和周波数又は差周波数及び受信信号の一方にある周波数選択フィルタを有することを特徴とする請求項1記載のレーダ。 - 前記ミキサの前記出力は、対象物の少なくともレンジを決定する信号プロセッサと通信することを特徴とする請求項1記載のレーダ。
- 前記信号プロセッサは、前記周波数選択フィルタの出力のスペクトル分析を実行するよう構成されていることを特徴とする請求項9記載のレーダ。
- 前記信号プロセッサは、公知の擬似ランダムコードシーケンス及び前記ミキサの出力の間の相互相関を実行するよう構成されていることを特徴とする請求項9記載のレーダ。
- 前記レーダは、アンテナ組立体をさらに具備することを特徴とする請求項1記載のレーダ。
- 一方の前記アンテナ組立体は、前記送信状態及び前記受信状態で使用されることを特徴とする請求項12記載のレーダ。
- 前記アンテナ組立体は、少なくとも2個のアンテナ放射パターンを有するよう構成されていることを特徴とする請求項12記載のレーダ。
- 前記アンテナ組立体は、少なくとも和パターン及び差パターンを有し、
前記和パターンは、前記送信状態の間、前記波形発生器に接続されており、
前記和パターン及び前記差パターンは、前記受信状態の間、前記ミキサに接続されていることを特徴とする請求項14記載のレーダ。 - 前記アンテナ組立体は、最大応答の方位が送信された周波数で変化するように構成されていることを特徴とする請求項12記載のレーダ。
- 無線周波数波形を発生する工程と、
第1周期にアンテナに対して前記無線周波数波形を供給する工程と、
第2周期の間、前記アンテナから信号を受信する工程と、
対象物レンジを決定するために受信された前記信号を処理する工程と
を具備し、
前記第2周期に対する前記第1周期の比が1より大きく、
前記第1周期及び前記第2周期の和の逆数でサンプリング周波数が与えられ、
前記サンプリング周波数は、前記受信信号及び前記無線周波数波形の間の差周波数の最大値の2倍以上であり、
前記アンテナは、和アンテナパターン及び差アンテナパターンを生成することを特徴とする、対象物の検出方法。 - 前記無線周波数波形を発生する工程は、周波数変調連続波信号を発生することを特徴とする請求項17記載の方法。
- 前記無線周波数波形を発生する工程は、擬似ランダムコードシーケンスにより変調された搬送波を発生する工程からなることを特徴とする請求項17記載の方法。
- 前記アンテナは、少なくとも2個の明確なアンテナ応答パターンを有するアンテナ開口であり、
前記アンテナ応答パターンの各々は、最大応答の異なる方位を有することを特徴とする請求項17記載の方法。 - 前記アンテナは、アンテナ応答開口が前記無線周波数波形の周波数で変化する最大応答の方向を有するアンテナ開口であることを特徴とする請求項17記載の方法。
- 前記無線周波数波形の周波数レンジは、方位レンジに関連することを特徴とする請求項21記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/327,739 | 2006-01-05 | ||
| US11/327,739 US7791530B2 (en) | 2006-01-05 | 2006-01-05 | Time duplex apparatus and method for radar sensor front-ends |
| PCT/US2006/048942 WO2008048318A2 (en) | 2006-01-05 | 2006-12-22 | Time duplex apparatus and method for radar sensor front-ends |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009522575A JP2009522575A (ja) | 2009-06-11 |
| JP2009522575A5 JP2009522575A5 (ja) | 2009-11-19 |
| JP5501622B2 true JP5501622B2 (ja) | 2014-05-28 |
Family
ID=38223799
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008549497A Expired - Fee Related JP5501622B2 (ja) | 2006-01-05 | 2006-12-22 | レーダセンサ前端用の時間二重化の装置及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7791530B2 (ja) |
| EP (1) | EP1969392A2 (ja) |
| JP (1) | JP5501622B2 (ja) |
| WO (1) | WO2008048318A2 (ja) |
Families Citing this family (81)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005048209A1 (de) * | 2005-09-29 | 2007-04-05 | Valeo Schalter Und Sensoren Gmbh | Kraftfahrzeug-Radarverfahren und -Radarsystem |
| US7791530B2 (en) * | 2006-01-05 | 2010-09-07 | Autoliv Asp, Inc. | Time duplex apparatus and method for radar sensor front-ends |
| FR2898732B1 (fr) * | 2006-03-17 | 2008-04-25 | Thales Sa | Procede de compensation des erreurs de positionnement des elements rayonnants d'une antenne reseau |
| US7573420B2 (en) * | 2007-05-14 | 2009-08-11 | Infineon Technologies Ag | RF front-end for a radar system |
| JP4977443B2 (ja) * | 2006-10-31 | 2012-07-18 | 日立オートモティブシステムズ株式会社 | レーダ装置及びレーダ検出方法 |
| US7864099B2 (en) * | 2007-07-20 | 2011-01-04 | Gm Global Technology Operations, Inc. | Low cost short range radar |
| DE102007043535A1 (de) * | 2007-09-12 | 2009-03-19 | Robert Bosch Gmbh | FMCW-Radarortungsvorrichtung und entsprechendes FMCW-Radarortungsverfahren |
| JP2009198363A (ja) * | 2008-02-22 | 2009-09-03 | Omron Corp | 電波探知装置および方法 |
| DE102008034572B4 (de) * | 2008-07-21 | 2015-04-02 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Empfangsvorrichtung |
| US7791528B2 (en) * | 2008-11-24 | 2010-09-07 | Autoliv Asp, Inc. | Method and apparatus for radar signal processing |
| DE102008054624A1 (de) | 2008-12-15 | 2010-06-17 | Robert Bosch Gmbh | FMCW-Radarsensor für Kraftfahrzeuge |
| US8654006B2 (en) * | 2009-02-13 | 2014-02-18 | Freescale Semiconductor, Inc. | Integrated circuit comprising frequency generation circuitry for controlling a frequency source |
| US8422967B2 (en) * | 2009-06-09 | 2013-04-16 | Broadcom Corporation | Method and system for amplitude modulation utilizing a leaky wave antenna |
| JP5387191B2 (ja) * | 2009-07-16 | 2014-01-15 | 富士通株式会社 | 通信装置 |
| GB2472085A (en) * | 2009-07-24 | 2011-01-26 | Wayne Rudd | Methods and apparatus for determining the time of receipt of a received signal |
| US20110150138A1 (en) * | 2009-12-18 | 2011-06-23 | Electronics And Telecommunications Research Institute | High linearity mixer and direct conversion receiver using the same |
| US8115672B2 (en) * | 2010-02-02 | 2012-02-14 | Thales | Method of measuring distance, notably for short-range radar |
| DE102010001761A1 (de) * | 2010-02-10 | 2011-08-11 | Robert Bosch GmbH, 70469 | Radarsensor |
| FR2959318B1 (fr) * | 2010-04-22 | 2013-04-05 | Eurocopter France | Localisation continue de grande precision |
| KR101172240B1 (ko) * | 2010-05-18 | 2012-08-07 | 주식회사 만도 | 센서 및 얼라이먼트 조절 방법 |
| JP5491981B2 (ja) * | 2010-06-17 | 2014-05-14 | 株式会社東芝 | レーダ装置 |
| US8581778B2 (en) * | 2010-07-19 | 2013-11-12 | Scidea Research, Inc. | Pulse compression system and method |
| US8125373B2 (en) * | 2010-07-23 | 2012-02-28 | Toyota Motor Engineering & Manufacturing North America, Inc. | Microwave system utilizing elevational scanning by frequency hopping |
| US8378878B2 (en) * | 2010-08-05 | 2013-02-19 | ARETé ASSOCIATES | Creating and processing universal radar waveforms |
| KR20120065652A (ko) * | 2010-12-13 | 2012-06-21 | 한국전자통신연구원 | 레이더 센서용 rf 송수신기 |
| US8207888B1 (en) * | 2011-01-24 | 2012-06-26 | The United States Of America As Represented By The Secretary Of The Navy | Systems and methods of range tracking |
| DE102012102185A1 (de) * | 2011-03-16 | 2012-09-27 | Electronics And Telecommunications Research Institute | Radarvorrichtung, die den kurz- und langreichweitigen Radarbetrieb unterstützt |
| JP2012194103A (ja) * | 2011-03-17 | 2012-10-11 | Fujitsu Ltd | レーダ装置 |
| KR101052025B1 (ko) | 2011-04-14 | 2011-07-26 | 삼성탈레스 주식회사 | 주파수 변조 연속파 레이더의 분산 동기화 방법 및 이를 이용한 주파수 변조 연속파 레이더 시스템 |
| KR101213043B1 (ko) * | 2011-04-19 | 2012-12-18 | 국방과학연구소 | 탐지추적 레이더, 이를 구비한 고속 이동체 방어시스템 및 탐지추적 레이더의 고속 이동체 추적방법 |
| US11539392B2 (en) | 2012-07-30 | 2022-12-27 | Photonic Systems, Inc. | Same-aperture any-frequency simultaneous transmit and receive communication system |
| US9935680B2 (en) * | 2012-07-30 | 2018-04-03 | Photonic Systems, Inc. | Same-aperture any-frequency simultaneous transmit and receive communication system |
| US10374656B2 (en) | 2012-07-30 | 2019-08-06 | Photonic Systems, Inc. | Same-aperture any-frequency simultaneous transmit and receive communication system |
| US9194946B1 (en) * | 2012-09-10 | 2015-11-24 | Honeywell International Inc. | Combined FMCW and FM pulse-compression radar systems and methods |
| US9645228B1 (en) * | 2012-12-14 | 2017-05-09 | Sandia Corporation | Shaping the spectrum of random-phase radar waveforms |
| CN105073615B (zh) * | 2013-03-05 | 2017-09-19 | 通力股份公司 | 电梯的门道 |
| LU92331B1 (en) * | 2013-12-10 | 2015-06-11 | Iee Sarl | Radar sensor with frequency dependent beam steering |
| US20150204969A1 (en) * | 2014-01-17 | 2015-07-23 | SpotterRF LLC | Target spotting and tracking apparatus and method |
| EP2905764B1 (en) * | 2014-02-10 | 2021-04-07 | Circet | Hybrid magnetic-radar detector for space management |
| KR102204839B1 (ko) * | 2014-02-11 | 2021-01-19 | 한국전자통신연구원 | 레이더를 이용한 표적 검출 장치 및 표적을 검출하는 방법 |
| US9389113B2 (en) * | 2014-03-05 | 2016-07-12 | Rosemount Tank Radar Ab | Low power radar level gauge system |
| JP6384018B2 (ja) * | 2014-03-25 | 2018-09-05 | 日本無線株式会社 | 車載用レーダ装置 |
| US9791550B2 (en) | 2014-07-23 | 2017-10-17 | Honeywell International Inc. | Frequency-Modulated-Continuous-Wave (FMCW) radar with timing synchronization |
| US9864043B2 (en) * | 2014-07-23 | 2018-01-09 | Honeywell International Inc. | FMCW radar with phase encoded data channel |
| US10094920B2 (en) * | 2014-08-27 | 2018-10-09 | Texas Instruments Incorporated | Range resolution in FMCW radars |
| CN105301592B (zh) * | 2015-10-12 | 2017-09-29 | 合肥工业大学 | 采用汽车防撞雷达系统的多目标识别算法 |
| DE102015226443A1 (de) * | 2015-12-22 | 2017-06-22 | Robert Bosch Gmbh | Radarsensor, entsprechendes Betriebsverfahren und Fahrzeug |
| DE102016202936A1 (de) * | 2016-02-25 | 2017-08-31 | Robert Bosch Gmbh | Vorrichtung zum Ermitteln von Betriebsdaten für einen Radarsensor |
| EP3211444B1 (en) | 2016-02-29 | 2019-06-12 | Nxp B.V. | Radar system |
| EP3211445B1 (en) * | 2016-02-29 | 2019-06-12 | Nxp B.V. | Radar system |
| US10261179B2 (en) | 2016-04-07 | 2019-04-16 | Uhnder, Inc. | Software defined automotive radar |
| US9846228B2 (en) | 2016-04-07 | 2017-12-19 | Uhnder, Inc. | Software defined automotive radar systems |
| WO2017175190A1 (en) | 2016-04-07 | 2017-10-12 | Uhnder, Inc. | Adaptive transmission and interference cancellation for mimo radar |
| US11002829B2 (en) * | 2016-04-15 | 2021-05-11 | Mediatek Inc. | Radar interference mitigation method and apparatus |
| US9791564B1 (en) | 2016-04-25 | 2017-10-17 | Uhnder, Inc. | Adaptive filtering for FMCW interference mitigation in PMCW radar systems |
| US9575160B1 (en) * | 2016-04-25 | 2017-02-21 | Uhnder, Inc. | Vehicular radar sensing system utilizing high rate true random number generator |
| US9791551B1 (en) | 2016-04-25 | 2017-10-17 | Uhnder, Inc. | Vehicular radar system with self-interference cancellation |
| WO2017187331A1 (en) | 2016-04-25 | 2017-11-02 | Uhnder, Inc. | Vehicle radar system with a shared radar and communication system |
| US9806914B1 (en) | 2016-04-25 | 2017-10-31 | Uhnder, Inc. | Successive signal interference mitigation |
| WO2017187304A2 (en) | 2016-04-25 | 2017-11-02 | Uhnder, Inc. | Digital frequency modulated continuous wave radar using handcrafted constant envelope modulation |
| EP3449275A4 (en) | 2016-04-25 | 2020-01-01 | Uhnder, Inc. | MITIGATION OF INTERFERENCE BETWEEN MAINTAINED PHASES WITH PHASE MODULATION |
| WO2017187242A1 (en) | 2016-04-25 | 2017-11-02 | Uhnder, Inc. | On-demand multi-scan micro doppler for vehicle |
| US10573959B2 (en) | 2016-04-25 | 2020-02-25 | Uhnder, Inc. | Vehicle radar system using shaped antenna patterns |
| US9753121B1 (en) | 2016-06-20 | 2017-09-05 | Uhnder, Inc. | Power control for improved near-far performance of radar systems |
| US10620298B2 (en) * | 2016-08-26 | 2020-04-14 | Infineon Technologies Ag | Receive chain configuration for concurrent multi-mode radar operation |
| US9869762B1 (en) | 2016-09-16 | 2018-01-16 | Uhnder, Inc. | Virtual radar configuration for 2D array |
| DE102017200706A1 (de) * | 2017-01-18 | 2018-07-19 | Robert Bosch Gmbh | Mehrfach unterabgetastetes Chirp-Sequence-Radar |
| US11454697B2 (en) | 2017-02-10 | 2022-09-27 | Uhnder, Inc. | Increasing performance of a receive pipeline of a radar with memory optimization |
| WO2018146530A1 (en) | 2017-02-10 | 2018-08-16 | Uhnder, Inc. | Reduced complexity fft-based correlation for automotive radar |
| US10670695B2 (en) | 2017-02-10 | 2020-06-02 | Uhnder, Inc. | Programmable code generation for radar sensing systems |
| JP6717254B2 (ja) * | 2017-04-19 | 2020-07-01 | 株式会社デンソー | レーダ信号処理器及びレーダシステム |
| US11105890B2 (en) | 2017-12-14 | 2021-08-31 | Uhnder, Inc. | Frequency modulated signal cancellation in variable power mode for radar applications |
| KR102093363B1 (ko) * | 2018-04-12 | 2020-03-25 | 주식회사 만도 | 레이더 시스템 및 이를 위한 송신 장치 |
| US11474225B2 (en) | 2018-11-09 | 2022-10-18 | Uhnder, Inc. | Pulse digital mimo radar system |
| US11681017B2 (en) | 2019-03-12 | 2023-06-20 | Uhnder, Inc. | Method and apparatus for mitigation of low frequency noise in radar systems |
| US11309636B2 (en) * | 2019-12-18 | 2022-04-19 | Waymo Llc | Antenna structure for reducing beam squint and sidelobes |
| US11899126B2 (en) | 2020-01-13 | 2024-02-13 | Uhnder, Inc. | Method and system for multi-chip operation of radar systems |
| DE102020202500A1 (de) * | 2020-02-27 | 2021-09-02 | Robert Bosch Gesellschaft mit beschränkter Haftung | MIMO-Radarsystem |
| DE102020202498A1 (de) * | 2020-02-27 | 2021-09-02 | Robert Bosch Gmbh | MIMO-Radarsystem |
| US12248091B2 (en) * | 2021-09-27 | 2025-03-11 | Texas Instruments Incorporated | Radar system implementing segmented chirps and phase compensation for object movement |
| US20240410976A1 (en) | 2021-10-19 | 2024-12-12 | Ivan Evgenjevich KOSHURINOV | Transceiver device for a homodyne radar |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3087153A (en) * | 1956-06-08 | 1963-04-23 | Bendix Corp | Gated pulse radar system |
| US3370166A (en) * | 1966-02-21 | 1968-02-20 | Bosch Arma Corp | Object detector and control system employing same |
| US3991418A (en) | 1970-02-10 | 1976-11-09 | Avco Corporation | Electromagnetic wave direction finding using Doppler techniques |
| US4161732A (en) * | 1976-11-12 | 1979-07-17 | Westinghouse Electric Corp. | Gated pulse compression radar |
| US4219812A (en) * | 1978-12-26 | 1980-08-26 | The United States Of America As Represented By The Secretary Of The Army | Range-gated pulse doppler radar system |
| US4952939A (en) * | 1989-02-16 | 1990-08-28 | Seed Willian R | Radar intrusion detection system |
| US5309160A (en) * | 1993-01-04 | 1994-05-03 | Westinghouse Electric Corp. | Radar system and method having variable tracking range |
| US5636123A (en) * | 1994-07-15 | 1997-06-03 | Rich; Richard S. | Traffic alert and collision avoidance coding system |
| EP0777131A1 (de) * | 1995-12-06 | 1997-06-04 | Geberit Technik Ag | Überwachungsvorrichtung mit einer Radarsonde |
| US5726657A (en) * | 1996-03-22 | 1998-03-10 | Lockheed Martin Corporation | Phase coherent radar system using fast frequency agile waveform synthesis |
| FR2763134B1 (fr) * | 1997-05-07 | 1999-07-30 | Thomson Csf | Procede de traitement du signal de reception d'un radar sar a rampes de frequence |
| JP3011164B2 (ja) * | 1997-11-14 | 2000-02-21 | 日本電気株式会社 | レーダ装置 |
| US6020843A (en) * | 1999-03-30 | 2000-02-01 | Raytheon Company | Technique for implementing very large pulse compression biphase codes |
| JP4258941B2 (ja) | 1999-06-03 | 2009-04-30 | 株式会社デンソー | レーダ装置 |
| JP2001051049A (ja) * | 1999-08-10 | 2001-02-23 | Oki Electric Ind Co Ltd | レーダ装置 |
| JP2002122661A (ja) * | 2000-10-12 | 2002-04-26 | Fujitsu Ten Ltd | 1アンテナ時分割制御方式fm−cwレーダ |
| JP2002168946A (ja) * | 2000-11-30 | 2002-06-14 | Matsushita Electric Works Ltd | 測距レーダ装置 |
| FI110966B (fi) | 2001-11-21 | 2003-04-30 | Vaisala Oyj | Menetelmä taajuusmoduloidun, katkotun jatkuva-aaltotutkasignaalin (FMICW) käsittelemiseksi |
| JP4266674B2 (ja) * | 2003-03-05 | 2009-05-20 | 富士通テン株式会社 | レーダ装置 |
| JP4103675B2 (ja) * | 2003-05-07 | 2008-06-18 | 三菱電機株式会社 | レーダ装置 |
| JP4986454B2 (ja) * | 2004-01-15 | 2012-07-25 | 富士通テン株式会社 | レーダ装置 |
| US7791530B2 (en) * | 2006-01-05 | 2010-09-07 | Autoliv Asp, Inc. | Time duplex apparatus and method for radar sensor front-ends |
-
2006
- 2006-01-05 US US11/327,739 patent/US7791530B2/en active Active
- 2006-12-22 JP JP2008549497A patent/JP5501622B2/ja not_active Expired - Fee Related
- 2006-12-22 WO PCT/US2006/048942 patent/WO2008048318A2/en active Application Filing
- 2006-12-22 EP EP06851798A patent/EP1969392A2/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| US20070152871A1 (en) | 2007-07-05 |
| JP2009522575A (ja) | 2009-06-11 |
| WO2008048318A2 (en) | 2008-04-24 |
| US7791530B2 (en) | 2010-09-07 |
| EP1969392A2 (en) | 2008-09-17 |
| WO2008048318A3 (en) | 2008-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5501622B2 (ja) | レーダセンサ前端用の時間二重化の装置及び方法 | |
| US11906618B2 (en) | MIMO radar apparatuses and MIMO radar methods | |
| US10557933B2 (en) | Radar device and position-determination method | |
| US11422249B2 (en) | Radar device and method for detecting radar targets | |
| US9470784B2 (en) | Radar device | |
| AU2002333123B2 (en) | Spread spectrum radar with leak compensation at baseband | |
| CN101430378B (zh) | 实现目标体方向的精确检测的车辆安装方向检测设备 | |
| US10436890B2 (en) | Method for finding the position of objects using an FMCW radar | |
| US8947293B2 (en) | Radar apparatus | |
| US20080088499A1 (en) | Methods and apparatus for hyperview automotive radar | |
| US12078748B2 (en) | Method and system for intefrence management for digital radars | |
| US12013484B2 (en) | Radar receiving system and method for compensating a phase error between radar receiving circuits | |
| US20180143297A1 (en) | Decentralised radar system | |
| AU2002333123A1 (en) | Spread spectrum radar with leak compensation at baseband | |
| JP2021513657A (ja) | 自動車用の角度分解型で広帯域のレーダセンサ | |
| EP3961242A1 (en) | Multiple-mode radar with resolution of spatial ambiguity | |
| JP2016151424A (ja) | レーダ装置 | |
| KR20230140385A (ko) | Mimo 레이더 장치 및 mimo 레이더 방법 | |
| US8779968B2 (en) | System and method for microwave ranging to a target in presence of clutter and multi-path effects | |
| US11681039B2 (en) | Failure determination apparatus and method of vehicle radar apparatus, and vehicle radar apparatus with the same | |
| US20090219208A1 (en) | Digital beam forming using frequency-modulated signals | |
| KR20160066413A (ko) | Fmcw 레이더의 동작방법 | |
| US20240036183A1 (en) | Radar method and radar system for a phase-coherent analysis | |
| US20250216540A1 (en) | Mimo radar with object reflected signal overlap detection | |
| CN120028756A (zh) | 信号收发方法及雷达装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090928 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120502 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121225 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130322 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130329 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130423 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130501 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130523 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5501622 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |