JP5490230B2 - 輸送台船、洋上構造物設置システム及び洋上構造物設置方法 - Google Patents
輸送台船、洋上構造物設置システム及び洋上構造物設置方法 Download PDFInfo
- Publication number
- JP5490230B2 JP5490230B2 JP2012515909A JP2012515909A JP5490230B2 JP 5490230 B2 JP5490230 B2 JP 5490230B2 JP 2012515909 A JP2012515909 A JP 2012515909A JP 2012515909 A JP2012515909 A JP 2012515909A JP 5490230 B2 JP5490230 B2 JP 5490230B2
- Authority
- JP
- Japan
- Prior art keywords
- load
- crane
- transport carrier
- loading platform
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/003—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting very large loads, e.g. offshore structure modules
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/10—Arrangement of ship-based loading or unloading equipment for cargo or passengers of cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/16—Arrangement of ship-based loading or unloading equipment for cargo or passengers of lifts or hoists
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/06—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using foils acting on ambient water
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/14—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude for indicating inclination or duration of roll
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B77/00—Transporting or installing offshore structures on site using buoyancy forces, e.g. using semi-submersible barges, ballasting the structure or transporting of oil-and-gas platforms
- B63B77/10—Transporting or installing offshore structures on site using buoyancy forces, e.g. using semi-submersible barges, ballasting the structure or transporting of oil-and-gas platforms specially adapted for electric power plants, e.g. wind turbines or tidal turbine generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/02—Devices for facilitating retrieval of floating objects, e.g. for recovering crafts from water
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B17/00—Vessels parts, details, or accessories, not otherwise provided for
- B63B2017/0072—Seaway compensators
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02B—HYDRAULIC ENGINEERING
- E02B3/00—Engineering works in connection with control or use of streams, rivers, coasts, or other marine sites; Sealings or joints for engineering works in general
- E02B3/20—Equipment for shipping on coasts, in harbours or on other fixed marine structures, e.g. bollards
Description
移動後、ジャッキアップ脚を海底へ降ろし船体を海面上へ完全に持ち上げた状態で、デッキクレーンを用いて輸送台船から各パーツを吊り上げ設置作業が行われる。
また、設置海域に作業用台船が常駐している場合は、作業用台船の隣に輸送台船をジャッキアップした後、作業用台船に備えたデッキクレーンで輸送台船上に積載された風車パーツ等を吊り上げ、そのまま設置作業を行うこともある。
また、風車の設置海域についても、岸から遠く水深の深い海域に風車を設置することが多く、更に、風車自体も大型化していく傾向があり、設置工事時間、設置工事コストが嵩んでしまうという問題があった。
本発明は、このような事情に鑑みてなされたものであって、輸送コストおよび設置時間を低減し、かつ、積荷を損傷させることなく積荷を降ろす作業を行える輸送台船、洋上構造物設置システムを提供することを目的とする。
そこで、輸送台船の積荷架台を上下昇降可能に構成し、積荷架台から積荷を吊り上げる際に積荷架台を下げ降ろすことを可能にした。
そのため、輸送台船を海底にジャッキアップさせることなく、波による輸送台船の上下揺れの影響を緩和することができる。したがって、積荷を吊り上げる際に積荷と積荷架台とがぶつかることが防止され、高価なジャッキアップ装置を備えた輸送台船を使用するコストおよびジャッキアップを行う時間が低減されることとなる。
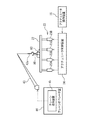
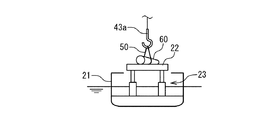
図1を参照して、本発明の第1の実施形態について説明する。洋上構造物設置システム10は、輸送台船20と、クレーン作業船40とを備える。輸送台船20は、船体21と、積荷架台22と、アクチュエータ群23とを備える。クレーン作業船40は、船体41と、ジャッキアップ装置42と、デッキクレーン43と、クレーンオペレータ室44とを備える。デッキクレーン43及びクレーンオペレータ室44は船体41上に設けられる。ジャッキアップ装置42は、ジャッキアップ脚42aを備える。デッキクレーン43は、輸送物を吊り上げるフック43aを備える。輸送台船20及びクレーン作業船40は、自航又は曳航により航行可能である。
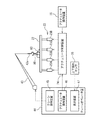
図4を参照して、本発明の第2の実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法を説明する。本実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法は、下記点で第1の実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法と異なり、その他の点で第1の実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法と同じである。
図5を参照して、本発明の第3の実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法を説明する。本実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法は、下記点で第1の実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法と異なり、その他の点で第1の実施形態に係る洋上構造物設置システム10及び洋上構造物設置方法と同じである。
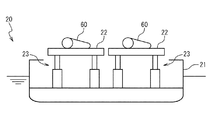
図6を参照して、本発明の第4の実施形態に係る輸送台船20を説明する。本実施形態に係る輸送台船20は、第1乃至第3の実施形態のいずれかに係る輸送台船20に他の積荷架台22及び他のアクチュエータ群23が追加されたものである。他の積荷架台22及び他のアクチュエータ群23は、上述の積荷架台22及びアクチュエータ群23と同じように構成されて同じように動作する。他の積荷架台22には他の積荷60が載せられる。
図7を参照して、本発明の第5の実施形態に係る輸送台船20を説明する。本実施形態に係る輸送台船20は、第1乃至第4の実施形態のいずれかに係る輸送台船20に減揺板29が追加されたものである。減揺板29は、輸送台船20の前後揺れを低減するために船体21から前後に張り出す、又は、輸送台船20の左右揺れを低減するために船体21から左右に張り出す。本実施形態によれば、輸送台船20の前後揺れ又は左右揺れが低減されるため、荷吊作業が容易になる。なお、前後揺れを低減するための減揺板29及び左右揺れを低減するための減揺板29の両方が設けられてもよい。
図8を参照して、本発明の第6の実施形態に係る輸送台船20を説明する。本実施形態に係る輸送台船20は、第1乃至第5の実施形態のいずれかに係る輸送台船20から船型が変更されたものである。本実施形態に係る輸送台船20の船体21は、SWATH(Small Waterplane Area Twin Hull)船型である。本実施形態によれば、輸送台船20の上下揺れの振幅が小さくなるため、荷吊作業が容易になる。
図9を参照して、本発明の第7の実施形態に係る輸送台船20を説明する。本実施形態に係る輸送台船20は、第1乃至第5の実施形態のいずれかに係る輸送台船20から船型が変更されたものである。本実施形態に係る輸送台船20の船体21は、セミサブ(Semi−Submersible)船型である。本実施形態によれば、輸送台船20の上下揺れの振幅が小さくなるため、荷吊作業が容易になる。
Claims (11)
- 構造物を洋上に設置する場合に用いる輸送台船であって、
台船内において構造物を搭載する積荷架台を上下に駆動するアクチュエータ群を具備し、
前記アクチュエータ群は、第1手動操作に基づいて前記積荷架台を下げ降ろし、
前記積荷架台の動揺が低減されるように前記アクチュエータ群を前記輸送台船の前後揺れ又は左右揺れに基づいて自動制御するアクチュエータ制御装置を更に具備する
輸送台船。 - 前記アクチュエータ群は、前記輸送台船の上下揺れの上限のタイミングで前記積荷架台を下げ降ろす
請求項1に記載の輸送台船。 - 前記輸送台船の前後揺れ又は左右揺れを低減する減揺板を更に具備する
請求項1又は2に記載の輸送台船。 - 構造物を洋上に設置する場合に用いる輸送台船と、
クレーン作業船と
を具備し、
前記輸送台船は、台船内において前記構造物用の積荷を搭載する積荷架台を上下に駆動するアクチュエータ群を備え、
前記クレーン作業船は、
デッキクレーンと、
第1手動操作により第1操作信号を生成するアクチュエータ操作装置と、
第2手動操作により第2操作信号を生成するクレーン操作装置と
を備え、
前記アクチュエータ群は、前記第1操作信号に基づいて前記積荷架台を下げ降し、
前記デッキクレーンは、前記第2操作信号に基づいて前記積荷架台に載せられた積荷を吊り上げる
洋上構造物設置システム。 - 前記輸送台船は、前記輸送台船の上下揺れを検知して上下揺れ検知信号を出力する上下揺れセンサを備え、
前記クレーン作業船は、前記上下揺れ検知信号に基づいて前記輸送台船の上下揺れを表示する表示装置を備える
請求項4の洋上構造物設置システム。 - 前記デッキクレーンは、前記輸送台船の上下揺れの上限のタイミングで前記積荷架台に載せられた前記積荷を吊り上げ、
前記アクチュエータ群は、前記上限のタイミングで前記積荷架台を下げ降ろす
請求項4又は5に記載の洋上構造物設置システム。 - 前記クレーン作業船は、
前記デッキクレーンが設けられた船体と、
前記船体を海底に支持するジャッキアップ装置と
を備える
請求項4乃至6のいずれかに記載の洋上構造物設置システム。 - 洋上で輸送台船の積荷架台に載せられた積荷を吊り上げることと、
前記積荷を吊り上げる際に前記積荷架台を下げ降ろすことと、
アクチュエータ操作装置が第1手動操作に基づいて第1操作信号を出力することと、
クレーン操作装置が第2手動操作に基づいて第2操作信号を出力することと
を具備し、
前記積荷架台を下げ降ろすことにおいて、前記輸送台船のアクチュエータ群が前記第1操作信号に基づいて前記積荷架台を下げ降ろし、
前記積荷を吊り上げることにおいて、クレーン作業船のデッキクレーンが前記第2操作信号に基づいて前記積荷を吊り上げ、
前記アクチュエータ操作装置及び前記クレーン操作装置は、前記輸送台船及び前記クレーン作業船の一方に設けられる
洋上構造物設置方法。 - 前記アクチュエータ操作装置及び前記クレーン操作装置は、前記クレーン作業船に設けられ、
前記輸送台船の上下揺れを検知することと、
前記クレーン作業船の表示装置が前記輸送台船の上下揺れを表示することと
を更に具備する
請求項8に記載の洋上構造物設置方法。 - 前記積荷を吊り上げること及び前記積荷架台を下げ降ろすことを前記輸送台船の上下揺れの上限のタイミングで実行する
請求項8又は9に記載の洋上構造物設置方法。 - 前記積荷を吊り上げることにおいて、ジャッキアップ脚を介して海底に支持されたクレーン作業船が前記積荷を吊り上げる
請求項8に記載の洋上構造物設置方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012515909A JP5490230B2 (ja) | 2010-05-20 | 2011-05-18 | 輸送台船、洋上構造物設置システム及び洋上構造物設置方法 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010116143 | 2010-05-20 | ||
| JP2010116143 | 2010-05-20 | ||
| PCT/JP2011/061445 WO2011145655A1 (ja) | 2010-05-20 | 2011-05-18 | 輸送台船、洋上構造物設置システム及び洋上構造物設置方法 |
| JP2012515909A JP5490230B2 (ja) | 2010-05-20 | 2011-05-18 | 輸送台船、洋上構造物設置システム及び洋上構造物設置方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2011145655A1 JPWO2011145655A1 (ja) | 2013-07-22 |
| JP5490230B2 true JP5490230B2 (ja) | 2014-05-14 |
Family
ID=44991749
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012515909A Active JP5490230B2 (ja) | 2010-05-20 | 2011-05-18 | 輸送台船、洋上構造物設置システム及び洋上構造物設置方法 |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2572976B1 (ja) |
| JP (1) | JP5490230B2 (ja) |
| KR (1) | KR101432416B1 (ja) |
| CN (1) | CN102869568B (ja) |
| WO (1) | WO2011145655A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101379025B1 (ko) * | 2012-05-17 | 2014-03-28 | 삼성중공업 주식회사 | 풍력 발전기 설치용 선박 |
| CN103449315B (zh) * | 2013-09-17 | 2015-02-04 | 无锡市江南船舶设备有限公司 | 克令吊升降装置 |
| DK3237750T3 (da) | 2014-12-23 | 2019-11-18 | Mhi Vestas Offshore Wind As | Vindmøllevingehåndtering ombord på et skib |
| EP3514100A1 (en) * | 2018-01-23 | 2019-07-24 | Seasight Davits ApS | Method and coupling arrangement for loading equipment onto a wind turbine platform |
| CN108189980B (zh) * | 2018-02-05 | 2019-11-05 | 南京科远自动化集团股份有限公司 | 一种停靠码头船舶的位置姿态实时测量方法及测量系统 |
| US10544015B1 (en) * | 2018-07-10 | 2020-01-28 | GeoSea N.V. | Device and method for lifting an object from a deck of a vessel subject to movements |
| US10308327B1 (en) * | 2018-07-10 | 2019-06-04 | GeoSea N.V. | Device and method for lifting an object from a deck of a vessel subject to movements |
| NL2024562B1 (en) | 2019-12-23 | 2021-09-02 | Itrec Bv | A feeder vessel |
| NO20201444A1 (en) | 2020-12-30 | 2022-07-01 | Macgregor Norway As | Displacement of a horizontal pile |
| NL2027600B1 (nl) * | 2021-02-19 | 2022-10-07 | Barge Master Ip B V | Offshore samenstel omvattende een bewegingscompensatie-platform met daarop een object met een hoogte van 30-50 meter of meer, bewegingscompensatie platform, alsmede gebruik van het samenstel. |
| NL2028189B1 (en) | 2021-05-11 | 2022-11-29 | Itrec Bv | Offloading an object from a heave motion compensated carrier of a vessel. |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57130888A (en) * | 1981-02-07 | 1982-08-13 | Mitsui Eng & Shipbuild Co Ltd | Semi-submerged work ship associated with elevating work table |
| JPS60195215A (ja) * | 1984-03-19 | 1985-10-03 | Hitachi Zosen Corp | 大型海洋構造物の据付装置 |
| JPS61163793U (ja) * | 1985-03-30 | 1986-10-11 | ||
| JPH0117992B2 (ja) * | 1982-09-16 | 1989-04-03 | Mitsui Shipbuilding Eng | |
| JP3206248B2 (ja) * | 1993-09-02 | 2001-09-10 | 石川島播磨重工業株式会社 | 海上荷役作業時の動揺吸収装置 |
| JP2005132130A (ja) * | 2003-10-28 | 2005-05-26 | Taisei Corp | 台船及びジャケット構造体の構築方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2934905A (en) * | 1957-12-16 | 1960-05-03 | Moore Corp Lee C | Barge-carried oil well drilling equipment |
| FR2353477A1 (fr) * | 1976-06-02 | 1977-12-30 | Petroles Cie Francaise | Procede de transbordement de charges en mer et moyen de mise en oeuvre |
| GB2165188B (en) * | 1985-06-05 | 1988-10-12 | Heerema Engineering | Installation and removal vessel |
| IT1184238B (it) * | 1985-06-19 | 1987-10-22 | Saipem Spa | Procedimento per l'installazione della sovrastruttura in monoblocco di una piattaforma offshore ed attrezzature per la sua messa in pratica |
| JPH0711033Y2 (ja) | 1988-08-03 | 1995-03-15 | 三菱重工業株式会社 | 船舶の上部構造物動揺吸収制御装置 |
| US5037241A (en) * | 1990-03-29 | 1991-08-06 | Exxon Production Research Company | Method and apparatus for setting a superstructure onto an offshore platform |
| GB2267360B (en) * | 1992-05-22 | 1995-12-06 | Octec Ltd | Method and system for interacting with floating objects |
| US6085851A (en) * | 1996-05-03 | 2000-07-11 | Transocean Offshore Inc. | Multi-activity offshore exploration and/or development drill method and apparatus |
| US7152547B1 (en) * | 2006-02-01 | 2006-12-26 | Pgs Geophysical As | Seismic vessel having motion-stabilized helicopter landing platform |
| NL1031263C2 (nl) * | 2006-03-01 | 2007-09-04 | Univ Delft Tech | Vaartuig, bewegingsplatform, werkwijze voor het compenseren voor bewegingen van een vaartuig en gebruik van een Stewart platform. |
| KR100956092B1 (ko) * | 2008-03-03 | 2010-05-07 | 삼성중공업 주식회사 | 부유식 해양 설비의 구조물 수평 유지장치 및 이를 이용한부유식 해양 설비 |
-
2011
- 2011-05-18 CN CN201180021971.9A patent/CN102869568B/zh active Active
- 2011-05-18 EP EP11783589.2A patent/EP2572976B1/en active Active
- 2011-05-18 KR KR1020127028495A patent/KR101432416B1/ko active IP Right Grant
- 2011-05-18 JP JP2012515909A patent/JP5490230B2/ja active Active
- 2011-05-18 WO PCT/JP2011/061445 patent/WO2011145655A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57130888A (en) * | 1981-02-07 | 1982-08-13 | Mitsui Eng & Shipbuild Co Ltd | Semi-submerged work ship associated with elevating work table |
| JPH0117992B2 (ja) * | 1982-09-16 | 1989-04-03 | Mitsui Shipbuilding Eng | |
| JPS60195215A (ja) * | 1984-03-19 | 1985-10-03 | Hitachi Zosen Corp | 大型海洋構造物の据付装置 |
| JPS61163793U (ja) * | 1985-03-30 | 1986-10-11 | ||
| JP3206248B2 (ja) * | 1993-09-02 | 2001-09-10 | 石川島播磨重工業株式会社 | 海上荷役作業時の動揺吸収装置 |
| JP2005132130A (ja) * | 2003-10-28 | 2005-05-26 | Taisei Corp | 台船及びジャケット構造体の構築方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101432416B1 (ko) | 2014-08-20 |
| WO2011145655A1 (ja) | 2011-11-24 |
| EP2572976A1 (en) | 2013-03-27 |
| EP2572976B1 (en) | 2021-06-16 |
| CN102869568B (zh) | 2015-11-25 |
| JPWO2011145655A1 (ja) | 2013-07-22 |
| CN102869568A (zh) | 2013-01-09 |
| KR20120138819A (ko) | 2012-12-26 |
| EP2572976A4 (en) | 2017-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5490230B2 (ja) | 輸送台船、洋上構造物設置システム及び洋上構造物設置方法 | |
| JP5639557B2 (ja) | 海洋構造物の運搬および設置用船舶並びに海洋構造物の運搬および設置方法 | |
| US8701579B2 (en) | Offshore wind turbine installation | |
| KR101865164B1 (ko) | 분리형 해상 구조물 설치 선박 및 그 운용 방법 | |
| DK201170319A (en) | A self-propelled semi-submersible offshore wind farm installation vessel with a large crane | |
| EP2251254A1 (en) | Installation vessel for offshore wind turbines | |
| US9022691B2 (en) | Method of installing an offshore wind turbine and a transport vessel thereof | |
| WO2013125535A1 (ja) | 洋上風車設置用船舶および洋上風車設置方法 | |
| JP2021524418A (ja) | 動きにさらされる船舶のデッキから物体を持ち上げるための装置および方法 | |
| JP5565803B2 (ja) | 緊張係留浮体構造物の設置方法及び緊張係留浮体構造物の設置用船 | |
| CN104540767A (zh) | 将负载降至海底以及从海底升高的方法 | |
| JP2012107585A (ja) | 洋上風車設置用船舶およびこれを用いた洋上風車設置方法 | |
| WO2012039619A2 (en) | Vessel comprising a hull with a deck and a cargo area extending in a length direction of the deck | |
| JP2014227765A (ja) | 洋上風力発電施設の据付方法及び洋上風力発電施設用バージ | |
| JP2018203195A (ja) | 洋上施工用浮体 | |
| EP3810500B1 (en) | Method and vessel for deploying heavy objects | |
| KR101186257B1 (ko) | 부력용 부유체를 구비하는 크레인선 및 그의 안정화 방법 | |
| KR101112127B1 (ko) | 안티모션 파운데이션 | |
| US20120082530A1 (en) | System and method for submerging a hydraulic turbine engine | |
| CN112512954A (zh) | 悬吊起重机系统 | |
| KR101566522B1 (ko) | 대형 블록 탑재 방법 | |
| GB2564665A (en) | Subsea installation method | |
| US20220355907A1 (en) | Systems and methods for a rack structure for a transport vessel adapted for use with an offshore self-elevating vessel | |
| CN116675108A (zh) | 一种带浮态动态平衡控制的船用走轨式门式起重机结构 | |
| KR101338917B1 (ko) | 선박용 스러스터의 육상 장착 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130807 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131031 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140225 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5490230 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |