JP5462121B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP5462121B2 JP5462121B2 JP2010220166A JP2010220166A JP5462121B2 JP 5462121 B2 JP5462121 B2 JP 5462121B2 JP 2010220166 A JP2010220166 A JP 2010220166A JP 2010220166 A JP2010220166 A JP 2010220166A JP 5462121 B2 JP5462121 B2 JP 5462121B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- abnormality
- value
- current
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005856 abnormality Effects 0.000 claims description 76
- 230000002159 abnormal effect Effects 0.000 claims description 16
- 239000011229 interlayer Substances 0.000 claims description 11
- 238000004804 winding Methods 0.000 claims description 11
- 238000001514 detection method Methods 0.000 description 22
- 230000001360 synchronised effect Effects 0.000 description 16
- 238000010586 diagram Methods 0.000 description 13
- 230000008859 change Effects 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000010349 pulsation Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000032683 aging Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0487—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting motor faults
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
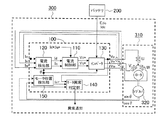
モータ装置300は、モータ運転時のゼロ速度(停止状態)から高速度回転までの動作状態においてモータ異常を検知してフェールセーフする用途に適したものである。モータ装置300は、モータ310とモータ制御装置100を有している。
モータが正常時のモータトルクは、図2(a)に実線で示すように、電流制御によりほぼ一定のトルクが出力され、モータ運転状態値は、図2(b)に実線で示すように、安定した一定値を示す。ここで、モータ運転状態値は、モータ310の回転速度の影響を除去するために、モータ回転速度に応じて発生する逆起電圧相当分を補正演算することによりモータの加減速状態によらず、ほぼ一定値のモータ運転状態値を得ることができる。

モータ異常の状態を層間短絡ではなく、モータ310に取り付けられた位置センサ部320の異常について示している点が図2と異なり、他は図2と同様である。
110…電流制御部
120…電流検出部
130…インバータ
140…モータ異常判定部
150…モータ位置検出部
200…バッテリ
300…モータ装置
310…モータ
320…位置センサ部
Claims (5)
- モータに出力される出力電流の電流値を検知して目標トルクに応じた電流値に制御するモータ制御装置であって、
前記モータの運転中に前記モータに出力される出力電流の電流値と出力電圧の電圧値に基づいてモータ運転状態値を演算し、該演算されたモータ運転状態値に基づいて前記モータに異常が発生しているか否かを判定するモータ異常判定部を有し、
前記モータ異常判定部は、前記モータの運転中に前記出力電流から検出した有効電流成分と前記出力電圧の電圧値の比から前記モータ運転状態値を演算することを特徴とするモータ制御装置。 - 前記モータ異常判定部は、前記モータ運転状態値が予め設定された判定値を越えた場合に、前記モータに異常が発生していると判定することを特徴とする請求項1に記載のモータ制御装置。
- 前記モータ異常判定部は、前記モータ運転状態値の電気角1周期内における変動幅が、予め設定された判定幅以上の場合に、前記モータに異常が発生していると判定することを特徴とする請求項1に記載のモータ制御装置。
- 前記モータ異常判定部は、電気角の繰返し周期の都度、予め設定された数周期連続して前記モータ運転状態値が予め設定された判定値を越えた場合に、前記モータに異常が発生していると判定することを特徴とする請求項1に記載のモータ制御装置。
- 前記モータ異常判定部は、前記モータの異常として、前記モータの巻線に層間短絡が発生しているか、もしくは、モータの位置を検出する位置センサ部に異常が発生していると判断することを特徴とする請求項1に記載のモータ制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010220166A JP5462121B2 (ja) | 2010-09-30 | 2010-09-30 | モータ制御装置 |
| PCT/JP2011/069703 WO2012043116A1 (ja) | 2010-09-30 | 2011-08-31 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010220166A JP5462121B2 (ja) | 2010-09-30 | 2010-09-30 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012075293A JP2012075293A (ja) | 2012-04-12 |
| JP2012075293A5 JP2012075293A5 (ja) | 2012-10-18 |
| JP5462121B2 true JP5462121B2 (ja) | 2014-04-02 |
Family
ID=45892590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010220166A Active JP5462121B2 (ja) | 2010-09-30 | 2010-09-30 | モータ制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5462121B2 (ja) |
| WO (1) | WO2012043116A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6033172B2 (ja) * | 2013-07-02 | 2016-11-30 | アイシン精機株式会社 | 駆動切替用制御装置 |
| JP6435993B2 (ja) * | 2015-06-01 | 2018-12-12 | 株式会社デンソー | 回転電機の制御装置 |
| JP6765320B2 (ja) * | 2017-02-28 | 2020-10-07 | 株式会社日立産機システム | 交流電動機の制御装置 |
| JP6698732B2 (ja) * | 2018-03-23 | 2020-05-27 | ファナック株式会社 | モータ制御装置およびモータ制御装置の制御方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0458778A (ja) * | 1990-06-26 | 1992-02-25 | Fuji Electric Co Ltd | ベクトル制御形可変電圧・可変周波数インバータ |
| JP4220292B2 (ja) * | 2003-04-22 | 2009-02-04 | 東芝三菱電機産業システム株式会社 | 電動ファン異常検出装置 |
| JP2007202220A (ja) * | 2006-01-23 | 2007-08-09 | Fanuc Ltd | ファンモータ異常検出装置、ファンモータおよび電動機 |
-
2010
- 2010-09-30 JP JP2010220166A patent/JP5462121B2/ja active Active
-
2011
- 2011-08-31 WO PCT/JP2011/069703 patent/WO2012043116A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012075293A (ja) | 2012-04-12 |
| WO2012043116A1 (ja) | 2012-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5993616B2 (ja) | 電動機の駆動制御装置 | |
| US7495411B2 (en) | Controller for an electric four-wheel-drive vehicle | |
| JP5511973B2 (ja) | 電気機械のトルクの妥当性検査の方法を実行し、電気機械を制御する機械制御器 | |
| EP2097288B1 (en) | Apparatus and method for controlling energy feedback for electric vehicle | |
| US8786238B2 (en) | Drive system for rotating electric machine | |
| US20070216327A1 (en) | Vehicle drive control system, motor control device and a method for drive control of a vehicle | |
| WO2009119215A1 (ja) | 回転電機制御システム及び当該回転電機制御システムを備えた車両駆動システム | |
| JP6445937B2 (ja) | 電動パワーステアリング装置 | |
| EP2939866A1 (en) | Motor control device and motor control method | |
| JP6266280B2 (ja) | 電気自動車のスリップ制御装置 | |
| WO2008077350A1 (en) | Method and apparatus for controlling motor for skid mode of electric vehicle | |
| CN106330035A (zh) | 旋转电机控制装置 | |
| JP2013510555A5 (ja) | ||
| US9428079B2 (en) | Electric vehicle | |
| JP5462121B2 (ja) | モータ制御装置 | |
| JP5476795B2 (ja) | 電動車両の制御装置 | |
| WO2015001849A1 (ja) | 電動車両の制動制御装置 | |
| JP5786500B2 (ja) | 駆動装置 | |
| JP5884747B2 (ja) | 交流電動機の制御装置 | |
| JP2018085891A (ja) | モータ駆動装置、及びモータ駆動装置の制御装置 | |
| CN112152543A (zh) | 逆变装置和车辆控制装置 | |
| JP2001260920A (ja) | 動力舵取装置 | |
| JP2001260919A (ja) | 動力舵取装置 | |
| JP2009214585A (ja) | 四輪駆動車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120903 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5462121 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |