以下に、本発明の実施の形態に係る誘導装置について、図面を参照しながら説明する。なお、以下の説明においては、カプセル型医療装置として、被検体内に経口にて導入され、被検体の胃に蓄えた液体中を漂うカプセル型内視鏡を用いるカプセル型内視鏡用誘導システムを例示するが、この実施の形態によって本発明が限定されるものではない。即ち、本発明は、例えば被検体の食道から肛門にかけて管腔内を移動するカプセル型内視鏡や、肛門から等張液とともに導入されるカプセル型内視鏡など、種々のカプセル型医療装置を用いることが可能である。また、以下の説明において、各図は本発明の内容を理解でき得る程度に形状、大きさ、及び位置関係を概略的に示してあるに過ぎない。従って、本発明は各図で例示された形状、大きさ、及び位置関係のみに限定されるものではない。なお、図面の記載において、同一部分には同一の符号を付している。
(実施の形態1)
図1は、本発明の実施の形態1に係るカプセル型医療装置誘導システムの一構成例を示す模式図である。図1に示すように、実施の形態1に係るカプセル型医療装置誘導システム(以下、単に誘導システムともいう)1は、被検体の体腔内に導入されるカプセル型医療装置であって、内部に永久磁石が設けられたカプセル型内視鏡10と、3次元的な磁界を発生して、被検体内に導入されたカプセル型内視鏡10を磁気誘導する誘導装置20とを備える。
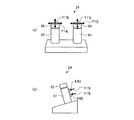
図2及び図3は、誘導装置20の一構成例を模式的に示す一部断面側面図である。図2は、カプセル型内視鏡10を誘導する磁界が遮蔽されていない状態(以下、磁界生成状態という)を示す。一方、図3は、カプセル型内視鏡10を誘導する磁界が遮蔽されている状態(以下、磁界遮蔽状態という)を示す。
図2及び図3に示すように、誘導装置20には、被検体101が載置される載置台として、脚部20bに支持されたベッド20aが設けられている。以下において、カプセル型内視鏡10の誘導可能な磁界が生成される領域を有効磁界領域100という。実施の形態1において、有効磁界領域100はベッド20a上の一部の領域に設定されている。通常、被検体101は、この有効磁界領域100に検査(診断)対象部位が重なるように、ベッド20a上に載置される。
カプセル型内視鏡10は、経口摂取等によって所定の液体とともに被検体101の臓器内部に導入された後、消化管内部を移動して、最終的に、被検体101の外部に排出される。カプセル型内視鏡10は、その間、被検体101の臓器内部(例えば胃内部)に導入された液体中を漂い、誘導装置20が生成した磁界によって磁気誘導されつつ被検体101内を順次撮像し、撮像によって取得した体内画像に対応する画像情報(画像データ)を順次無線送信する。なお、カプセル型内視鏡10の詳細な構造については後述する。
誘導装置20は、カプセル型内視鏡10との間で無線通信を行いカプセル型内視鏡10が取得した画像情報を含む無線信号を受信する受信部21と、カプセル型内視鏡10から受信した無線信号に基づいて、被検体101内におけるカプセル型内視鏡10の位置を検出する位置検出部22と、受信部21が受信した無線信号から画像情報を取得し、該画像情報に所定の信号処理を施した体内画像や種々の情報を画面表示する表示部23aと、ユーザに対して視覚情報又は聴覚情報により報知を行う報知部23bと、誘導システム1における各種操作を指示する情報等の入力を受け付ける操作入力部24と、カプセル型内視鏡10を誘導するための磁界を生成する磁界生成部25と、磁界生成部25が生成する磁界を遮蔽する遮蔽部26と、遮蔽部26による磁界の遮蔽状態を検出する遮蔽状態検知部27と、これらの各部を制御する制御部28と、カプセル型内視鏡10によって撮像された画像情報などを記憶する記憶部29とを備える。
受信部21は、複数のアンテナ21aを備え、これらの複数のアンテナ21aを介してカプセル型内視鏡10からの無線信号を順次受信する。受信部21は、複数のアンテナ21aの中から最も受信電界強度の高いアンテナを選択し、選択したアンテナを介して受信したカプセル型内視鏡10からの無線信号に対して復調処理等を行う。これにより、受信部21は、この無線信号から被検体101内に関する画像データを抽出する。受信部21は、抽出した画像データを含む画像信号を表示部23aに出力する。
位置検出部22は、受信部21が受信した無線信号の信号強度に基づいて、被検体101内におけるカプセル型内視鏡10の位置を推定する演算を行う。
表示部23aは、液晶ディスプレイ等の各種ディスプレイを含み、受信部21から入力された画像データに基づく体内画像や、その他各種情報を含む画面を生成してディスプレイに表示する。具体的には、表示部23aは、例えば、カプセル型内視鏡10が撮像した被検体101の体内画像群を順次画面に表示すると共に、カプセル型内視鏡10の位置や姿勢に関する情報や誘導操作に関する情報を表示する。この際、表示部23aは、誘導装置20が発生する磁界から推定されるカプセル型内視鏡10の位置や姿勢を表示しても良いし、位置検出部22の位置検出結果に基づいて、表示中の体内画像に対応する被検体101内の位置を画面に表示しても良い。また、表示部23aは、例えば、制御部28の制御に従って選択された体内画像の縮小画像、被検体101の患者情報及び検査情報等を表示する。さらに、表示部23aは、制御部28の制御に従って、ユーザに対する警告や誘導装置20の状態(例えば磁界生成状態や磁界遮蔽状態)といった情報を画面に表示する。
報知部23bは、例えば、LED等の照明デバイスやブザー等の音声デバイスと、これらのデバイスを制御するための、制御部28の制御の下で動作する駆動回路とを含む。報知部23bは、照明の点滅やブザー音等によりユーザに対する警告を報知し、或いは、所定の色の照明の点灯により誘導装置20の状態(例えば磁界生成状態や磁界遮蔽状態)をユーザに報知する。
操作入力部24は、ジョイスティック、各種ボタン及び各種スイッチを備えた操作卓、キーボード等の入力デバイスによって実現され、カプセル型内視鏡10を磁気で誘導するための誘導指示情報や誘導装置20に対して所定のモードを設定するための設定情報といった各種情報の入力を受け付ける。誘導指示情報は、磁気誘導操作対象であるカプセル型内視鏡10の位置や姿勢を制御するための情報であり、詳細には、カプセル型内視鏡10の位置を変化させる動作や、カプセル型内視鏡10の傾斜角(鉛直軸に対する角度)を変化させる動作に関する情報や、カプセル型内視鏡10の視野(後述する撮像部11A、11B)の方位角(鉛直軸周りの角度)を変化させる動作に関する情報等が含まれる。なお、以下において、視野の方位角のことを、単に方位角という。操作入力部24は、受け付けたこれらの情報を制御部28に入力する。
磁界生成部25は、ベッド20aの下部(脚部20bの内側)に設けられ、被検体101内に導入されたカプセル型内視鏡10の位置や傾斜角や方位角を被検体101に対して相対的に変化させるための磁界を、有効磁界領域100に生成する。なお、磁界生成部25が生成する磁界の有効磁界領域100以外(例えば、脚部20bの側面方向)の空間への漏れを抑制するため、脚部20bを鉄板等の強磁性体によって形成することが好ましい。
磁界生成部25は、磁界を発生する体外永久磁石25aと、該体外永久磁石25aを並進及び回転させる機構として、平面位置変更部25bと、鉛直位置変更部25cと、仰角変更部25dと、旋回角変更部25eとを有する。
図4は、体外永久磁石25aの設置状態を説明するための模式図である。図4に示すように、体外永久磁石25aは、例えば直方体形状を有する棒磁石によって実現される。体外永久磁石25aは、磁化方向及び該磁化方向と直交する第1の方向を含む面と対向する領域内にカプセル型内視鏡10を拘束する。以下、体外永久磁石25aのうち、カプセル型内視鏡10と対向する面のことを、カプセル対向面PL1(第1の面)という。
体外永久磁石25aは、上記第1の方向(図4においてはY軸方向)と平行な任意の面を基準として配置される。本実施の形態1において、当該基準面は水平面と平行に設定され、カプセル型内視鏡10の初期状態において、カプセル対向面PL1は基準面(水平面)と平行になるように配置される。以下、体外永久磁石25aがカプセル型内視鏡10の初期状態にあるときの体外永久磁石25aの配置を初期位置とし、このときの磁化方向をX軸方向、磁化方向と直交する水平面内の方向をY軸方向、鉛直方向をZ軸方向とする。
体外永久磁石25aは、直方体形状の3方向の辺の長さの内、カプセル対向面PL1内で磁化方向と直交する方向(図4においては、Y軸方向)の辺の長さが、磁化方向(図4においては、X軸方向)及びカプセル対向面PL1と直交する方向(図4においては、Z軸方向)よりも長い形状を有している。好ましくは、体外永久磁石25aは、直方体形状の3方向の辺の長さの内、カプセル対向面PL1と直交する方向の長さが最も短い平板形状を有している。なお、体外永久磁石25aの形状については、後で詳述する。
平面位置変更部25bは、体外永久磁石25aを、基準面として設定された水平面内において並進させる並進機構である。即ち、体外永久磁石25aにおいて磁化された2つの磁極の相対位置が確保された状態のままで水平面内に移動を行うものである。
鉛直位置変更部25cは、体外永久磁石25aを、基準面として設定された水平面と直交する鉛直方向において並進させる並進機構である。
仰角変更部25dは、カプセル対向面PL1と平行且つ磁化方向と直交し、体外永久磁石25aの中心を通る軸(以下、回転軸YCという)に対して体外永久磁石25aを回転させることにより、基準面として設定された水平面に対する磁化方向の角度を変化させる回転機構である。以下、体外永久磁石25aと水平面とのなす角度を仰角θとする。
旋回角変更部25eは、基準面と直交する軸に対して体外永久磁石25aを回転させる。本実施の形態1においては、体外永久磁石25aの中心を通る鉛直方向の軸を、体外永久磁石25aの回転軸とする。以下、体外永久磁石25aの鉛直方向の軸に対する回転運動を旋回運動という。また、初期位置に対して体外永久磁石25aが旋回した角度を旋回角ψとする。
旋回角変更部25eにより体外永久磁石25aを旋回角ψだけ旋回させ、初期位置に対する回転軸YCの角度を変化させた状態で、仰角変更部25dにより体外永久磁石25aを回転軸YCに対して回転させることで、体外永久磁石25aが発生する磁界に拘束されたカプセル型内視鏡10の方位角及び傾斜角を変化させることができる。
図2及び図3に示すように、遮蔽部26は、ベッド20aの下面に設けられた板状の磁性体部材26aと、該磁性体部材26aをベッド20aの下面においてベッド20aの主面に対してスライド可能に支持する支持部26bと、磁性体部材26aをベッド20aに沿って駆動する駆動部26cと、固定部26dとを有する。
ここで、体外永久磁石25aは、電磁石と異なり、磁界発生のオン/オフや磁界の強度調整等を行うことができない。即ち、永久磁石は常時、所定の強度を有する磁界を発生するため、カプセル型内視鏡10の誘導操作を行っていないときや、誘導装置20を使用していないときに、カプセル型内視鏡10の意図しない移動や、被検体101への影響を抑制するために、磁界の強度を弱くするか、好ましくは遮蔽する必要がある。この点について、誘導装置20の非使用時には、強磁性体で生成された覆い部を体外永久磁石25aに被せて遮蔽するといった構成も考えられるが、この場合、磁界を遮蔽するための操作が煩雑であり、例えば、緊急事態が発生した時に素早く対応することが困難である。
それに対して、本実施の形態1においては、誘導装置20に遮蔽部26を設けることにより、より簡単な操作で有効磁界領域100における磁界を遮蔽することができる構成を提供するものである。
磁性体部材26aは、好ましくは強磁性体によって形成され、ベッド20aの下に挿入されることにより、磁界生成部25が生成する磁界を有効磁界領域100に対して遮蔽する。磁性体部材26aは、磁界生成部25が生成する磁界を有効磁界領域100に対して遮蔽できる素材及びサイズ(幅×長さ×厚さ)を有していれば良い。なお、本明細書において、幅とは、被検体101の横幅方向における寸法のことをいい、長さとは、被検体101の身長方向における寸法のことをいう。実施の形態1において、磁性体部材26aとして、例えばベッド20aの幅とほぼ等しい幅×ベッド20aの長さの半分程度の長さに形成した部材を用いている。
ベッド20aの下面には、磁性体部材26aが配置される凹部20cが設けられている。この凹部20cは、有効磁界領域100、即ち、被検体101の検査対象部位(例えば、胃部)が乗せられる領域から、検査対象ではない部位(例えば、下肢)が乗せられる領域までに対応するようその位置が決定されている。磁性体部材26aは、この凹部20cにおいて、ベッド20aの長さ方向にスライドして移動する。
支持部26bは、凹部20cに配置された磁性体部材26aを下側から支持する。好ましくは、磁性体部材26aをスライドさせ易くするため、支持部26bの上面(磁性体部材26aとの接触面)に、レール及び滑車を設けても良い。
駆動部26cは、凹部20c内で磁性体部材26aをベッド20aの長さ方向に移動させて、磁界生成部25と有効磁界領域100との間に対して磁性体部材26aを挿抜する。磁性体部材26aが磁界生成部25と有効磁界領域100との間に挿入されることにより、誘導装置20は磁界遮蔽状態となる(図3参照)。一方、磁性体部材26aが磁界生成部25と有効磁界領域100との間から抜去されることにより、誘導装置20は磁界生成状態となる(図2参照)。
固定部26dは、凹部20cの中間付近に設けられており、磁界生成状態と磁界遮蔽状態との間で意図しない遷移が生じないように、磁性体部材26aの位置を固定している。特に、誘導装置20が磁界生成状態にあるとき(図2参照)、磁性体部材26aには磁界生成部25が生成する磁界から、磁界遮蔽状態における位置にスライドさせようとする磁気引力が働く。このため、固定部26dにより、磁性体部材26aの移動を機械的に妨げている。なお、磁界生成状態から磁界遮蔽状態に遷移する際には、固定部26dは、制御部28の制御の下で動作する駆動部(図示せず)により、図の上方に移動させられる。それにより、磁性体部材26aの固定状態が解除される(図3参照)。なお、固定部26dを手動で操作して、磁性体部材26aの固定状態を解除しても良い。
遮蔽状態検知部27は、例えば、磁性体部材26aに印加される水平方向の圧力を検知する圧力センサによって実現される。ここで、上述したように、誘導装置20が磁界生成状態にあるとき(図2参照)、体外永久磁石25aと磁性体部材26aとの間には磁気引力が働く。従って、このとき、磁性体部材26aには、水平方向においては図の左方向の圧力が印加されている。一方、誘導装置20が磁界遮蔽状態にあるとき(図3参照)、体外永久磁石25aと磁性体部材26aとの間の磁気引力は主に上下方向に働くため、磁性体部材26aには水平方向の圧力はほとんどかからない。そこで、遮蔽状態検知部27で磁性体部材26aに印加される水平方向における圧力を検出することにより、誘導装置20の状態を判断することができる。即ち、遮蔽状態検知部27の出力値が所定の閾値以上である場合には、誘導装置20が磁界生成状態にあると判断することができる。反対に、この出力値が所定の閾値よりも小さい場合には、誘導装置20が磁界遮蔽状態にあると判断することができる。なお、この判断は、遮蔽状態検知部27の出力結果に基づいて制御部28が行う。
また、遮蔽状態検知部27としては、圧力センサの他にも、圧縮センサ、ひずみセンサ、加速度センサ(力センサ)のように、磁性体部材26aに印加される所定の方向における力の大きさを検出できるものであれば、どのようなセンサを用いても良い。或いは、磁性体部材26aの代わりに、体外永久磁石25aに印加される力を検知することにより、誘導装置20の状態を判断するようにしても良い。
制御部28は、位置検出部22の検出結果、及び操作入力部24から入力された誘導指示情報に基づいて磁界生成部25の各部の動作を制御することにより、カプセル型内視鏡10のユーザ所望の位置、傾斜角、及び方位角を実現する。また、制御部28は、操作入力部24から入力された操作信号に従って遮蔽部26を制御し、誘導装置20をカプセル型内視鏡検査のステータスに応じた状態(磁界生成状態又は磁界遮蔽状態)に遷移させる。
記憶部29は、フラッシュメモリ又はハードディスク等の書き換え可能に情報を保存する記憶メディアを用いて実現される。記憶部29は、カプセル型内視鏡10によって撮像された被検体101の体内画像群の画像データの他、制御部28が誘導装置20の各部を制御するための各種プログラムや各種パラメータといった情報を記憶する。
次に、カプセル型内視鏡10の詳細な構造について説明する。図5は、カプセル型内視鏡10の内部構造の一例を示す断面模式図である。図5に示すように、カプセル型内視鏡10は、被検体101の臓器内部に導入し易い大きさに形成された外装であるカプセル型筐体12と、互いに異なる撮像方向の被写体を撮像して画像情報を生成する撮像部11A、11Bとを備える。また、カプセル型内視鏡10は、撮像部11A、11Bによって取得された画像情報を外部に無線送信する無線通信部16と、カプセル型内視鏡10の各構成部を制御する制御部17と、カプセル型内視鏡10の各構成部に電力を供給する電源部18とを備える。さらに、カプセル型内視鏡10は、誘導装置20による磁気誘導を可能にするための永久磁石19を備える。
カプセル型筐体12は、被検体101の臓器内部に導入可能な大きさに形成された外装ケースであり、筒状筐体12aの両側開口端をドーム形状筐体12b、12cによって塞ぐことによって実現される。ドーム形状筐体12b、12cは、可視光等の所定波長帯域の光に対して透明なドーム形状の光学部材である。また、筒状筐体12aは、可視光に対して略不透明な有色の筐体である。これらの筒状筐体12a及びドーム形状筐体12b、12cによって形成されるカプセル型筐体12は、図5に示すように、撮像部11A、11B、無線通信部16、制御部17、電源部18及び永久磁石19を液密に内包する。
撮像部11Aは、LED等の照明部13Aと、集光レンズ等の光学系14Aと、CMOSイメージセンサ又はCCD等の撮像素子15Aとを有する。照明部13Aは、撮像素子15Aの撮像視野に白色光等の照明光を発光して、ドーム形状筐体12b越しに撮像視野内の被写体を照明する。光学系14Aは、この撮像視野からの反射光を撮像素子15Aの撮像面に集光し、撮像視野の被写体像を結像する。撮像素子15Aは、撮像面に集光された撮像視野からの反射光を受光し、受光した光信号を光電変換処理して、撮像視野の被写体像、即ち被検体101の体内画像を表す画像情報を生成する。
撮像部11Bは、撮像部11Aと同様に、LED等の照明部13Bと、集光レンズ等の光学系14Bと、CMOSイメージセンサ又はCCD等の撮像素子15Bとを有する。
図5に示すように、カプセル型内視鏡10が長軸La方向の前方及び後方を撮像する2眼タイプのカプセル型医療装置である場合、これらの撮像部11A、11Bは、各光軸がカプセル型筐体12の長手方向の中心軸である長軸Laと略平行又は略一致し、且つ各撮像視野が互いに反対方向を向くように配置される。即ち、撮像素子15A、15Bの撮像面が長軸Laに対して直交するように、撮像部11A、11Bが実装される。
無線通信部16は、アンテナ16aを備え、上述した撮像部11A、11Bによって取得された画像情報を、アンテナ16aを介して外部に順次無線送信する。具体的には、無線通信部16は、撮像部11A又は撮像部11Bが生成した画像情報に基づく画像信号を制御部17から取得し、該画像信号に対して変調処理等を行って、この画像信号を変調した無線信号を生成する。無線通信部16は、この無線信号を、アンテナ16aを介して外部の受信部21に送信する。
制御部17は、撮像部11A、11B及び無線通信部16の各動作を制御すると共に、これらの各構成部間における信号の入出力を制御する。具体的には、制御部17は、照明部13Aが照明した撮像視野内の被写体を撮像素子15Aに撮像させ、照明部13Bが照明した撮像視野内の被写体を撮像素子15Bに撮像させる。また、制御部17は、画像信号を生成する信号処理機能を有する。制御部17は、撮像素子15A、15Bから画像情報を取得し、その都度、この画像情報に対して所定の信号処理を施して、画像データを含む画像信号を生成する。さらに、制御部17は、このような画像信号を時系列に沿って外部に順次無線送信するように無線通信部16を制御する。
電源部18は、ボタン型電池又はキャパシタ等の蓄電部であって、磁気スイッチや光スイッチ等のスイッチ部を有する。電源部18は、外部から印加された磁界によって電源のオンオフ状態を切り替え、オン状態の場合に、蓄電部の電力をカプセル型内視鏡10の各構成部(撮像部11A、11B、無線通信部16、及び制御部17)に適宜供給する。また、電源部18は、オフ状態の場合に、カプセル型内視鏡10の各構成部への電力供給を停止する。
永久磁石19は、磁界生成部25が生成した磁界により、有効磁界領域100におけるカプセル型内視鏡10の磁気誘導を可能にするためのものであり、磁化方向が長軸Laに対して傾きを持つように、カプセル型筐体12の内部に固定配置される。具体的には、永久磁石19は、磁化方向が長軸Laに対して直交するように配置される。永久磁石19は、外部から印加された磁界に追従して動作し、この結果、磁界生成部25によるカプセル型内視鏡10の磁気誘導が実現する。
ここで、図6を参照しながら、撮像素子15A、15Bと永久磁石19との相対的な位置関係について説明する。永久磁石19は、上述した撮像部11A、11Bに対して相対的に固定された状態でカプセル型筐体12の内部に固定配置される。より詳細には、永久磁石19は、その磁化方向が、撮像素子15A、15Bの各撮像面の上下方向に対して相対的に固定されるように配置される。具体的には、図6に示すように、永久磁石19は、その磁化方向Ymが撮像素子15A、15Bの各撮像面の上下方向Yuに対して平行となるように配置される。
図7は、被検体101内に液体Wを導入した状態でのカプセル型内視鏡10の様子を説明するための概念図である。なお、図7は、カプセル型内視鏡10の位置、傾斜角、及び方位角を制御するための磁界が永久磁石19に作用していない状態を示している。
実施の形態1において例示するカプセル型内視鏡10は、液体Wに対する比重がほぼ1となるように設計されている。また、カプセル型内視鏡10の重心Gは、カプセル型内視鏡10の幾何学的中心Cからカプセル型内視鏡10の長軸La(カプセル型内視鏡10の長手方向の中心軸:図5参照)に沿ってずれた位置となるように設定されている。具体的には、カプセル型内視鏡10の重心Gは、電源部18及び永久磁石19等の各構成部の配置を調整することにより、長軸La上の位置であってカプセル型筐体12の幾何学的中心Cから撮像部11B側に外れた位置に設定される。これにより、カプセル型内視鏡10は、自身の長軸Laが鉛直方向(即ち、重力方向)と略平行になった状態で、液体W中を漂う。言い換えると、カプセル型内視鏡10は、幾何学的中心Cと重心Gとを結ぶ直線が直立した状態で液体W中を漂う。カプセル型内視鏡10は、このような直立姿勢において、鉛直上方に撮像部11Aの撮像視野を向けるとともに鉛直下方に撮像部11Bの撮像視野を向ける。なお、液体Wは、水又は生理食塩水等の人体に無害な液体である。
また、上述したように、永久磁石19は、その磁化方向Ym(図6参照)が長軸Laと直交するように配置される。即ち、永久磁石19の磁化方向Ymは、カプセル型内視鏡10の径方向と一致する。従って、カプセル型内視鏡10の位置、傾斜角、及び方位角を制御するための磁界が永久磁石19に作用していない場合、カプセル型内視鏡10は、磁化方向Ymが水平方向と一致した状態で液体W中を漂う。また、このとき、磁化方向Ymと、カプセル型筐体12の幾何学的中心C及び重心Gを結ぶラインとを通る平面が、鉛直平面となる。
図8は、被検体101内に液体Wを導入した状態でのカプセル型内視鏡10の様子を説明するための概念図であり、カプセル型内視鏡10の傾斜角及び方位角を制御するための磁界を永久磁石19に作用させている状態を示している。
図8に示すように、重力方向Dgに対するカプセル型内視鏡10の長軸Laの傾きは、カプセル型内視鏡10の永久磁石19に外部から磁界を作用させることで制御することができる。例えば、磁力線の方向が水平面に対して角度を有する磁界を永久磁石19に作用させることで、永久磁石19の磁化方向Ymがこの磁力線と略平行となるように、カプセル型内視鏡10を重力方向Dgに対して傾かせることができる。この場合、磁化方向Ymは、鉛直平面内に含まれた状態を維持しつつ、カプセル型内視鏡10の傾斜角が変化する。このような制御を行う磁界は、誘導装置20の仰角変更部25dにより体外永久磁石25aを回転させることにより実現される(図1及び図4参照)。
従って、カプセル型内視鏡10を傾かせた状態で、重力方向Dgを中心として旋回する磁界を印加してカプセル型内視鏡10を重力方向Dg周りに矢印のように旋回させることにより、カプセル型内視鏡10周囲の体内画像を容易に取得することが可能となる。このような制御を行う磁界は、誘導装置20の旋回角変更部25eにより体外永久磁石25aを旋回させることにより実現される(図1及び図4参照)。
このとき、誘導装置20の表示部23aは、カプセル型内視鏡10の磁気誘導に伴う体内画像内の被写体の上下方向と表示画面の上下方向とを一致させた表示態様でカプセル型内視鏡10による被検体101の体内画像を表示する。この結果、図9に示すように、表示部23aの表示画面Mには、カプセル型内視鏡10の撮像素子15Aの上部領域Puの素子が撮像した液面Wsが、撮像部11Aに対応する画像の上部になるように表示される。そして、永久磁石19の磁化方向Ymが撮像素子15A、15Bの各撮像面の上下方向Yuに対して平行であるため、永久磁石19の磁化方向Ymと平行な方向が表示部23aの表示画面の上下方向と一致することとなる。
図10に示すように、カプセル型内視鏡10の水平方向における並進運動は、カプセル対向面PL1に対して鉛直な方向に磁界強度のピークを持つ磁界(図10(a)参照)をカプセル型内視鏡10の永久磁石19に作用させ、この磁界のピーク位置に永久磁石19を引きつけてカプセル型内視鏡10を拘束することによって制御することができる(図10(b)参照)。このような磁界は、具体的には、誘導装置20の平面位置変更部25bにより体外永久磁石25aを水平面内で移動させることにより実現される。
図11に示すように、カプセル型内視鏡10の鉛直方向における並進運動は、磁界強度の分布がカプセル対向面PL1と直交する方向における距離に応じて変化する磁界をカプセル型内視鏡10の永久磁石19に作用させることによって制御することができる。このような磁界は、具体的には、誘導装置20の鉛直位置変更部25cで体外永久磁石25aを鉛直方向に移動させることにより実現される。
例えば、図11(a)に示すように、カプセル対向面PL1を水平にした場合に、鉛直位置が高くなるほど磁気強度が弱くなる磁界を永久磁石19に作用させる。このとき、図11(b)に示すように、体外永久磁石25aを上方に移動させて永久磁石19の鉛直位置を相対的に低くすると、永久磁石19に印加される磁気引力が強くなり、カプセル型内視鏡10が下方に付勢される。なお、カプセル型内視鏡10の鉛直方向における位置は、液体Wに対するカプセル型内視鏡10の浮力と、カプセル型内視鏡10にかかる重力と、体外永久磁石25aによって印加される磁気引力とのバランスが取れた位置にほぼ維持される。
次に、図1に示す操作入力部24の具体的な構成及び動作について説明する。図12(a)は、操作入力部24の正面図であり、図12(b)は、操作入力部24の右側面図である。図13は、操作入力部24の各構成部位の操作によって指示されるカプセル型内視鏡10の動きを示す図である。
図12(a)に示すように、操作入力部24は、磁界生成部25によるカプセル型内視鏡10の磁気誘導を3次元的に操作するための2つのジョイスティック61、62を備える。ジョイスティック61、62は、上下方向及び左右方向に傾動操作が可能である。
図12(b)に示すように、ジョイスティック61の背面には、アップボタン64U、ダウンボタン64Bが設けられている。アップボタン64Uは、押圧されることによってカプセル型内視鏡10の上方誘導を指示する誘導指示情報を制御部28に入力し、ダウンボタン64Bは、押圧されることによってカプセル型内視鏡10の下方誘導を指示する誘導指示情報を制御部28に入力する。ジョイスティック61の上部には、キャプチャボタン65が設けられている。キャプチャボタン65は、押圧されることによって、表示部23aに表示されている体内画像をキャプチャする。また、ジョイスティック62の上部には、アプローチボタン66が設けられている。アプローチボタン66は、押圧されることによって、撮像部11Aの撮像対象に対してカプセル型内視鏡10の撮像部11A側を近接させるようにカプセル型内視鏡10を誘導させる誘導指示情報を制御部28に入力する。
図12(a)に示すように、ジョイスティック61の矢印Y11jに示す上下方向の傾動方向は、図13の矢印Y11のようにカプセル型内視鏡10の先端が鉛直軸Azを通るように首を振るティルティング誘導方向に対応する。操作入力部24から、ジョイスティック61の矢印Y11jの傾動操作に対応する誘導指示情報が制御部28に入力された場合、制御部28は、この誘導指示情報をもとに、ジョイスティック61の傾動方向に応じてカプセル型内視鏡10先端の絶対座標系上における誘導方向を演算し、ジョイスティック61の傾動操作に応じて誘導量を演算する。そして、磁界生成部25は、例えば演算した誘導方向に、演算した誘導量に応じて体外永久磁石25aを回転させるよう、仰角変更部25dを制御する。
図12(a)に示すように、ジョイスティック61の矢印Y12jに示す左右方向の傾動方向は、図13の矢印Y12のようにカプセル型内視鏡10が鉛直軸Azを中心として回転するローテーション誘導方向に対応する。操作入力部24から、ジョイスティック61の矢印Y12jの傾動操作に対応する誘導指示情報が制御部28に入力された場合、制御部28は、この誘導指示情報をもとに、ジョイスティック61の傾動方向に応じてカプセル型内視鏡10先端の絶対座標系上における誘導方向を演算すると共に、ジョイスティック61の傾動操作に応じて誘導量を演算し、さらに、例えば演算した誘導方向に、演算した誘導量に応じて体外永久磁石25aを旋回させるよう、旋回角変更部25eを制御する。
図12(a)に示すように、ジョイスティック62の矢印Y13jに示す上下方向の傾動方向は、図13の矢印Y13のようにカプセル型内視鏡10の長軸Laを水平面Hpに投影した方向に進むホリゾンタルバックワード誘導方向又はホリゾンタルフォワード誘導方向に対応する。操作入力部24から、ジョイスティック62の矢印Y13jの傾動操作に対応する誘導指示情報が制御部28に入力された場合、制御部28は、この誘導指示情報をもとに、ジョイスティック62の傾動方向に応じてカプセル型内視鏡10先端の絶対座標系上における誘導方向及び誘導量を演算し、演算した誘導方向及び誘導量に応じて体外永久磁石25aを並進させるよう、平面位置変更部25bを制御する。
図12(a)に示すように、ジョイスティック62の矢印Y14jに示す左右方向の傾動方向は、図13の矢印Y14のようにカプセル型内視鏡10が水平面Hpを、長軸Laを水平面Hpに投影した方向と垂直に進むホリゾンタルライト誘導方向又はホリゾンタルレフト誘導方向に対応する。操作入力部24から、ジョイスティック62の矢印Y14jの傾動操作に対応する誘導指示情報が制御部28に入力された場合、制御部28は、この誘導指示情報をもとに、ジョイスティック62の傾動方向に応じてカプセル型内視鏡10先端の絶対座標系上における誘導方向及び誘導量を演算し、演算した誘導方向及び誘導量に応じて体外永久磁石25aを並進させるよう、平面位置変更部25bを制御する。
また、ジョイスティック61の背面には、アップボタン64U及びダウンボタン64Bが設けられている。図12(b)の矢印Y15jに示すようにアップボタン64Uが押圧された場合には、図13に示す鉛直軸Azに沿って矢印Y15のように上に進むアップ動作が指示される。また、図12(b)の矢印Y16jに示すように、ダウンボタン64Bが押圧された場合には、図13に示す鉛直軸Azに沿って矢印Y16のように下に進むダウン動作が指示される。操作入力部24から、アップボタン64U又はダウンボタン64Bの矢印Y15j、Y16jの押圧操作に対応する誘導指示情報が制御部28に入力された場合、制御部28は、この誘導指示情報をもとに、押圧されたボタンに応じて、カプセル型内視鏡10先端の絶対座標系上における誘導方向及び誘導量を演算し、演算した誘導方向及び誘導量に応じて体外永久磁石25aを鉛直方向に並進させるよう、鉛直位置変更部25cを制御する。例えば、アップボタン64Uが押圧された場合、鉛直位置変更部25cは、体外永久磁石25aを鉛直軸Azの下方向(カプセル型内視鏡10から離れる方向)に向かって並進させる。それにより、カプセル型内視鏡10は矢印Y15のように上昇する。一方、ダウンボタン64Bが押圧された場合、鉛直位置変更部25cは、体外永久磁石25aを鉛直軸Azの上方向(カプセル型内視鏡10に近づく方向)に向かって並進させる。それにより、カプセル型内視鏡10は、矢印Y16のように下降する。
なお、操作入力部24は、このようなジョイスティック61、62と共に、各種操作ボタンやキーボード等からなる入力デバイスをさらに有しても良い。
図14は、表示部23aに表示されるメニュー画面Sの表示例を示す模式図である。このメニュー画面Sには、左上方の領域S1に被検体101の患者名、患者ID、生年月日、性別、年齢等の各被検体情報が表示され、中央の領域S2には、撮像部11Aが撮像した生体画像Sg1が左側に表示され、撮像部11Bが撮像した生体画像Sg2が右側に表示され、領域S2の下方の領域S3には、キャプチャボタン65の押圧操作によってキャプチャされた各画像が、キャプチャ時間とともに縮小表示され、左側の領域S4にカプセル型内視鏡10の姿勢図として鉛直面における姿勢図Sg3、水平面における姿勢図Sg4が表示される。各姿勢図Sg3、Sg4に表示されるカプセル型内視鏡10の傾斜角及び方位角は、操作入力部24の誘導指示情報に対応する傾斜角及び方位角を表示している。実施の形態1においては、操作入力部24からの入力量が誘導する力に反映されるため、表示されるカプセル型内視鏡10の傾斜角及び方位角は、実際のカプセル型内視鏡10の傾斜角及び方位角とほぼ同じものと考えることができ、操作者の誘導指示補助も向上する。なお、この姿勢図Sg3、Sg4には、カプセル型内視鏡10を誘導可能な方向が矢印で示され、いずれかの誘導方向の操作入力があった場合には、入力された方向に対応する矢印の表示色を変えて、操作者の操作を補助している。
次に、図1に示す誘導システム1の動作について説明する。図15は、誘導システム1の動作を示すフローチャートである。
カプセル型医療装置誘導システム1が起動すると、まず、ステップS101において、誘導装置20の制御部28は、遮蔽状態検知部27の出力結果から、誘導装置20が磁界遮蔽状態(図3参照)にあることを確認する。
続くステップS102において、制御部28は、有効磁界領域100における磁界強度が最小となる位置(初期位置)に体外永久磁石25aが配置されていることを確認する。なお、体外永久磁石25aが初期位置にないとき、制御部28は、鉛直位置変更部25cを制御して、体外永久磁石25aを初期位置に移動させる。
ステップS103において、被検体101がベッド20aに載置されたことを示す信号が操作入力部24から入力されると、制御部28は、被検体101がベッド20aに載置されたことを認識する。この信号は、所定のユーザ操作(例えば、ベッド載置確認ボタンの押下)により入力されるようにしても良い。或いは、ベッド20aが所定の状態になった際(例えば、ベッド20aの被検体載置面に圧力センサを設け、この圧力センサの出力値が所定の閾値を超えた際)に入力されるようにしても良い。
ステップS104において、カプセル型内視鏡10の電源がオンされると、誘導装置20は、カプセル型内視鏡10から送信された無線信号を受信し、カプセル型内視鏡10が撮像した画像を取得できることを確認する。ここで、カプセル型内視鏡10のオンはカプセル型内視鏡10内に配置された電源部18の磁気スイッチや光スイッチがオンされることにより実現される。即ち、この磁気スイッチや光スイッチを起動するための外部からの磁気や光の印加がなされる。
ステップS105において、カプセル型内視鏡10が被検体101に嚥下されたことを示す信号が操作入力部24から入力されると、制御部28は、カプセル型内視鏡10が被検体101に嚥下されたことを認識する。この信号は、所定のユーザ操作(例えば、カプセル嚥下確認ボタンの押下)により入力されるようにしても良い。或いは、カプセル型内視鏡10から送信された画像データが所定の状態になった際(例えば、画像の色特徴量が体内であることを示す所定の状態になった際)に、当該信号が入力されるようにしても良い。
ステップS106において、検査開始を示す信号が操作入力部24から入力されると、制御部28は、誘導装置20を磁界生成状態に遷移させるよう、各部を制御する。この検査開始を示す信号は、例えば、操作入力部24の所定のボタン(例えば検査開始ボタン)の押下といった1アクションや、ジョイスティック61、62等による操作によって入力されるようにしても良い。
これにより、磁界生成部25と有効磁界領域100との間に配置されていた磁性体部材26aが抜去され、誘導装置20は磁界生成状態となる。このとき、磁界生成部25は初期位置にあるため(ステップS102参照)、有効磁界領域100に生成される磁界の強度は最小となる。これによりカプセル型内視鏡10に対して強度の大きな磁界が急激に印加されるのを避けることができる。以下、磁界生成部25が初期位置にある磁界生成状態(図16参照)を、弱磁界生成状態という。
ステップS107において、制御部28は、操作入力部24から入力された情報(例えば、左側臥位といった被検体101の体位情報)を受け付け、受け付けた情報を表示装置23aに表示させる。この際、制御部28は、カプセル型内視鏡10の絶対座標系(重力方向を基準とする座標系)と該情報とに基づいて被検体101内の相対座標系を取得し、この相対座標系に基づき、被検体101内における観察方向や観察部位を推定するといった演算処理を行っても良い。
ステップS108において、制御部28は、カプセル型内視鏡10の誘導を開始し、操作入力部24から入力された誘導指示情報に従って体外永久磁石25aの位置、仰角θ、及び旋回角ψを制御する。なお、この際、体外永久磁石25aを初期位置よりも上方に移動させることにより、有効磁界領域100に、より強度の大きな磁界が形成されるようになる。これにより、誘導装置20は、弱磁界生成状態から通常の磁界生成状態に遷移する。
ステップS109において、制御部28は、カプセル型内視鏡10から送信された無線信号を順次受信し、カプセル型内視鏡10が撮像した画像を表示部23aに表示させる。ユーザは、この画像を参照しながら操作入力部24を操作することにより、カプセル型内視鏡10を所望の位置、傾斜角、及び方位角に誘導することができる。
なお、ユーザは、必要に応じて被検体101の体位を変更しても良い。この場合、操作ボタンの押下や、キーボード等を用いた姿勢情報の入力といった操作入力部24に対する所定の操作により、被検体101の体位を変更した旨の信号を誘導装置20に入力することができる。制御部28は、操作入力部24から被検体101の体位を変更した旨の信号が入力されると、体外永久磁石25aを一旦初期位置に戻し、弱磁界生成状態とする。これにより、体位変更後のカプセル型内視鏡10に強度の大きな磁界が急激に印加されるのを避けることができる。
ステップS110において、制御部28は、緊急停止トリガがオンにされたか否かを判断する。ここで、緊急停止トリガは、例えば所定のボタン(緊急停止ボタン)の押下に応じて操作入力部24から入力される緊急停止信号であっても良いし、ステップS103において一旦認識された被検体101の載置が認識されなくなったことを示す信号(例えば、被検体載置面に設けられた圧力センサの出力値の低下)であっても良い。この他、地震等による振動の検出や、誘導装置20における急激な電圧の降下を緊急停止トリガとしても良い。
緊急停止トリガがオンにされた場合(ステップS110:Yes)、制御部28は、緊急停止トリガがオンにされた旨の報知を表示部23aや報知部23bに実行させると共に、遮蔽部26を制御して、誘導装置20を磁界遮蔽状態(緊急遮蔽)に遷移させる(ステップS111)。具体的な報知方法としては、「緊急停止します」といった視覚情報による警告を表示部23aに表示させても良いし、照明の点滅といった別の視覚情報による警告や、音声又は警告音といった聴覚情報による警告を報知部23bに実行させても良いし、或いは、これらの両方を実行させても良い。その後、誘導システム1の動作は、ステップS116に移行する。一方、緊急停止トリガがオンにされない場合(ステップS110:No)、誘導システム1の動作はステップS112に移行する。
ステップS112において、制御部28は、全ての画像の取得が完了した旨を示す信号が操作入力部24から入力されたか否かを判断する。この信号は、所定のユーザ操作(例えば、画像取得完了ボタンや誘導終了ボタンの押下)により入力されるようにしても良い。或いは、カプセル型内視鏡10から受信した画像が所定の枚数に達した場合や、カプセル型内視鏡10の電源がオンにされてから所定の時間が経過した場合に、当該信号が入力されるようにしても良い。
全ての画像の取得が完了した場合(ステップS112:Yes)、制御部28は、磁界生成部25の動作を停止させ、カプセル型内視鏡10の誘導を停止すると共に、体外永久磁石25aを初期位置に戻して誘導装置20を弱磁界生成状態に遷移させる(ステップS113)。
一方、全ての画像が未だ取得されていない場合(ステップS112:No)、制御部28は、操作入力部24から体位情報が新たに入力されたか否かを判断する(ステップS114)。体位情報が新たに入力された場合(ステップS114:Yes)、制御部28は、体外永久磁石25aを初期位置に戻して誘導装置20を弱磁界生成状態に遷移させる(ステップS115)。その後、誘導システム1の動作は、ステップS109に移行する。一方、体位情報が新たに入力されない場合(ステップS114:No)、誘導システム1の動作は、そのままステップS109に移行する。
ステップS116において、制御部28は、遮蔽部26を制御して、誘導装置20を磁界遮蔽状態に遷移させる。これにより、誘導システム1の動作が終了する。その後、ユーザは、被検体101をベッド20aから降ろす。
なお、以上の説明において、磁界生成状態と磁界遮蔽状態との遷移は、制御部28の制御の下で遮蔽部26が行ったが、ユーザが手動で磁性体部材26aを移動させることによりこの遷移を行っても良い。
次に、体外永久磁石25aの形状に関する条件について説明する。
本発明者らは、カプセル型内視鏡10を誘導するための磁界を体外永久磁石25aから効率的に発生させるため、永久磁石の形状(縦・横・高さの比)と発生磁界との関係をシミュレーションにより求めた。図17は、このシミュレーションにおける評価項目を説明するための模式図である。図17に示すように、本シミュレーションにおいては、永久磁石の磁化方向をx軸方向、シミュレーション位置と対向する面PL2の磁化方向と直交する方向をy軸方向、面PL2と直交する方向をz軸方向に設定し、シミュレーション位置における磁界強度と、同位置におけるz軸方向、x軸方向、及びy軸方向における各磁気勾配とを評価した。なお、磁気強度は、カプセル型内視鏡10の傾斜角及び方位角を変更する際の誘導に関与する。z軸方向の磁気勾配は、カプセル型内視鏡10に対するz軸方向における誘導に関与する。x軸方向の磁気勾配は、カプセル型内視鏡10に対するx軸方向における誘導に関与する。y軸方向の磁気勾配は、カプセル型内視鏡10に対するy軸方向における誘導に関与する。
また、本シミュレーションにおいては、直方体(立方体を含む)の永久磁石を用いた。図18は、シミュレーションに用いた永久磁石の各辺の長さの比を示す表である。図18に示す「x軸方向の長さLx」はx軸と平行な辺の長さLxを示し、「y軸方向の長さLy」はy軸と平行な辺の長さLyを示し、「z軸方向の長さLz」はz軸と平行な辺の長さLzを示す(図17参照)。また、図18の「タイプ」の欄には、各永久磁石の辺の内、長いものが左から順に示されている。例えば、タイプ「x−y−z」は、x軸と平行な辺が最も長く、z軸と平行な辺が最も短い直方体形状を示す(Lx>Ly>Lz)。なお、タイプ「xyz」は、全ての辺の長さが等しい立方体を示す(Lx=Ly=Lz)。
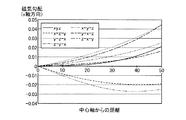
図19は、図18に示す各永久磁石の磁界強度を示すグラフである。図20は、図18に示す各永久磁石により発生するz軸方向における磁気勾配を示すグラフである。図21は、図18に示す各永久磁石により発生するx軸方向における磁気勾配を示すグラフである。図22は、図18に示す各永久磁石により発生するy軸方向における磁気勾配を示すグラフである。なお、図19において、磁界強度の値は正規化されている。また、図20〜図22を通して、磁気勾配の値は正規化されている。図21及び図22において、横軸は、永久磁石の中心を通るz軸方向の軸(中心軸)からの距離を正規化した値を示している。
カプセル型内視鏡10の傾斜角及び方位角の制御を効率的に行うためには、永久磁石が発生する磁界強度が強いことが好ましい。この点において、図19に示すように、比較的大きい磁界強度が得られた磁石は、タイプy−x−z及びタイプx−y−zであった。従って、カプセル型内視鏡10の傾斜角及び方位角の制御に適した形状は、z軸方向の長さLzがy軸方向の長さLyよりも短い形状であることがわかる。さらには、z軸方向の長さLzがx軸方向及びy軸方向の長さLx、Lyよりも短い、平たい形状がより好ましいと言える。
また、カプセル型内視鏡10の傾斜角を変化させる(即ち、永久磁石をy軸と平行な軸で回転させる)場合には、y軸と直交するzx平面への投影面積が小さい方が、回転時の永久磁石の移動領域を小さくすることができて好ましい。従って、x軸方向の長さLxを短くする方が良い。この場合、永久磁石をより被検体101に近づけて設置することができるので、強度の高い磁界を被検体101内に効率良く生成することができ、磁界生成部25を小型化することができる。
カプセル型内視鏡10の鉛直方向における位置制御を行うためには、鉛直方向における磁気勾配が大きい方が好ましい。この点において、図20に示すように、z軸方向において比較的大きな磁気勾配が得られた磁石は、タイプy−x−z及びタイプx−y−zであった。従って、カプセル型内視鏡10の鉛直方向における位置制御に適した形状は、z軸方向の長さLzを短くした平たい形状であることがわかる。
カプセル型内視鏡10の水平方向における位置制御を行うためには、水平方向における磁気勾配が大きい方が好ましい。この点において、図21に示すように、x軸方向において比較的大きな磁気勾配が得られた磁石は、タイプy−x−z及びタイプy−z−xであった。なお、タイプx−z−y及びタイプx−y−zの場合、永久磁石から離れた位置に磁気勾配のピークが形成されることがわかった。また、図22に示すように、y軸方向において比較的大きな磁気勾配が得られた磁石は、タイプy−x−z及びタイプx−y−zであった。これより、カプセル型内視鏡10の水平方向における制御に適した形状は、x軸方向及びz軸方向の長さLx、Lzと比較して、y軸方向の長さLyが長い形状であることがわかる。また、x軸方向の長さLxは、y軸方向及びz軸方向の長さLy、Lzと比較して、あまり長くしない方が好ましいと言える。
上記シミュレーションの結果から、カプセル型内視鏡10の制御に適した体外永久磁石25aの形状は、y軸方向の長さが最も長く、z軸方向の長さが最も短い平板状であることがわかった。そこで、本発明者らは、続いて、体外永久磁石25aの各辺の長さの好適な比率を求めるための別のシミュレーションを行った。
図23は、別のシミュレーションに用いた永久磁石の各辺の長さの比を示す表である。図23に示す「x軸方向の長さLx」はx軸(磁化方向)と平行な辺の長さLxに対応し、「y軸方向の長さLy」はy軸と平行な辺の長さLyに対応し、「z軸方向の長さLz」はz軸と平行な辺の長さLzに対応する(図17参照)。また、図23の「タイプ」の欄には、各永久磁石の辺の内、長いものが左から順に示されており、括弧の中の数値は、x軸方向の長さに対するz軸方向の長さの比率を示している。図23に示すように、このシミュレーションにおいては、いずれも、y軸方向と平行な辺が最も長く、z軸方向と平行な辺が最も短い直方体の永久磁石を用いている。
図24は、図23に示す各永久磁石の磁界強度を示すグラフである。図25は、図23に示す各永久磁石により発生するz軸方向における磁気勾配を示すグラフである。図26は、図23に示す各永久磁石により発生するx軸方向における磁気勾配を示すグラフである。図27は、図23に示す各永久磁石により発生するy軸方向における磁気勾配を示すグラフである。なお、図24において、磁界強度の値は正規化されている。また、図25〜図27を通して、磁気勾配の値は正規化されている。図26及び図27において、横軸は、永久磁石の中心を通るz軸方向の軸(中心軸)からの距離を正規化した値を示している。
図24及び図25に示すように、磁界強度及びz軸方向における磁気勾配については、いずれも良好な結果が得られており、永久磁石の各辺の長さの比率を変化させることによる効果は小さいことがわかる。
一方、図26に示すように、永久磁石のz軸方向の長さLzに対し、y軸方向の長さLyを長くするほど(例えば、タイプy−x−z(33)及びタイプy−x−z(50))、x軸方向における磁気勾配が著しく向上することがわかる。一方、この場合、この比率が極端になると(例えば、タイプy−x−z(33))、図27に示すように、y軸方向における磁気勾配が悪化することがわかる。しかしながら、y軸方向における磁気勾配に対してx軸方向における磁気勾配の値は小さいため、各軸方向における磁気勾配のバランスを考慮して、y軸方向の長さLyとz軸方向の長さLzの比を決定すれば良い。
図28は、z軸方向の長さLzに対するy軸方向の長さLyとの比率Ly/Lzと、タイプy−x−z(33)の永久磁石の磁界強度に対する上記各比率を有する永久磁石の磁界強度の比率との関係を示すグラフである。図28に示すように、z軸方向の長さLzに対するy軸方向の長さLyが1.5倍になると、タイプy−x−z(33)の永久磁石、即ち、長さLzに対する長さLyが十分に長い永久磁石が発生する磁界強度に対し、90%程度の磁界強度を発生させることができる。さらに、z軸方向の長さLzに対するy軸方向の長さLyが3倍以上になると、上記磁界強度の比率が95%となる。従って、好ましい永久磁石の形状として、z軸方向の長さLzに対するy軸方向の長さLyを1.5倍以上又は3倍以上とすると良い。
上記シミュレーションの結果を基に、体外永久磁石25aの形状を、y軸方向の長さLyが最も長い形状(Ly>Lx、Ly>Lz)に絞り、さらに詳細なシミュレーションを行った。
図29は、本シミュレーションに用いた永久磁石の各辺の長さの比を示す表である。図29に示す「x軸方向の長さL
x」はx軸(磁化方向)と平行な辺の長さL
xに対応し、「y軸方向の長さL
y」はy軸と平行な辺の長さL
yに対応し、「z軸方向の長さL
z」はz軸と平行な辺の長さL
zに対応する(図17参照)。また、図29に示すタイプA1〜A3は長さL
xを100とした場合を示し、タイプB1〜B3は長さL
xを50とした場合を示し、タイプC1〜C3は長さL
xを25とした場合を示している。さらに、図29の最下段に示す値Kは、永久磁石の形状の特徴を表す値であり、長さL
x、L
y、L
zを用いて以下のように定義される。
図30は、図29に示す各永久磁石のz方向の長さLzと磁界強度との関係を示すグラフである。図31は、図29に示す各永久磁石の長さLzとz軸方向における磁気勾配との関係を示すグラフである。図32は、図29に示す各永久磁石の長さLzとx軸方向における磁気勾配との関係を示すグラフである。図33は、図29に示す各永久磁石の長さLzとy軸方向における磁気勾配との関係を示すグラフである。なお、図30において、磁界強度の値は正規化されている。また、図31〜図33を通して、磁気勾配の値は正規化されている。
図34は、図30〜図33に示す結果の評価を表す表であり、磁気強度又はx軸、y軸、z軸における磁気勾配を、大きい、中程度、小さい、の3段階に分類して評価したものである。なお、図34においては、各評価項目に対し、大きいと評価されたものを符号◎、中程度と評価されたものを符号○、小さいと評価されたものを符号△で示している。
図34より、タイプA3、B2、及びC1の永久磁石は、全ての項目の評価結果に「小さい(△)」を含まず、磁界強度並びにx軸、y軸、及びz軸における磁気勾配のバランスが良く、効率的に磁界を発生していると言える。反対に、タイプC3の永久磁石は、x軸方向の磁気勾配のみが大きく(◎)、それ以外の項目では小さい(△)と評価されており、磁界の発生効率が著しく低いといえる。それ以外のタイプ(A1、A2、B1、B3、C2)の永久磁石による磁界の効率は、タイプA3、B2、C1とタイプC3との間と言える。
これらの結果から、効率的に磁界を発生することができる永久磁石の形状は、K値が1.0より大きく、22.6以下であると言える(1<K≦22.6)。
また、タイプA3、B2、及びC1の永久磁石の中で比較すると、z軸方向の長さLzに対してx軸方向の長さLxが短くなると、磁界強度、z軸方向の磁気勾配、及びy軸方向の磁気勾配が低下する。従って、x軸方向の長さLxは、z軸方向の長さLzに対してあまり短くしない方が好ましい。
以上より、カプセル型内視鏡10を誘導するための磁界を体外永久磁石25aから効率的に発生させるためのアスペクト比に関する条件は、以下のとおりとなる。即ち、K値の範囲は、1<K≦22.6であり、好ましくはK値を8近傍にすると良い。また、x軸方向の長さLxは、z軸方向の長さLz以上にすると良い(Lx≧Lz)。
以上説明したように、実施の形態1によれば、上述した条件を有する体外永久磁石25aを用いることにより、カプセル型内視鏡10の誘導に適した磁界を生成する誘導装置20を実現することができる。
また、実施の形態1によれば、誘導装置20に磁性体部材26aをスライドさせる遮蔽部26を設けたので、ユーザは、操作入力部24に対する簡単な入力操作や、手動により、誘導装置20の磁界生成状態と磁界遮蔽状態とを容易に且つ素早く遷移させることが可能となる。
また、実施の形態1によれば、カプセル型内視鏡検査のステータスに応じて、誘導装置20の状態を簡便な操作により遷移させるため、安全に検査を行うことができる。例えば、検査を開始した後で誘導装置20を磁界生成状態に遷移させるため、検査開始の前後に、磁界に意図しない金属部材が引き寄せられるといったリスクを抑制することができる。また、例えば、誘導装置20を磁界生成状態に遷移させた直後は、磁界強度が最も小さい状態となっているため、強度の高い磁界が被検体101に突然印加されるといったリスクを避けることができる。
また、実施の形態1によれば、検査の開始時や、検査開始後に被検体101の体位を変更した際に、体外永久磁石25aを初期位置に戻して、誘導装置20を弱磁界生成状態に遷移させるので、カプセル型内視鏡10に強度の大きな磁界が印加されて、ユーザの予期しない位置にカプセル型内視鏡10が移動してしまうといった事態を避けることができる。
また、実施の形態1によれば、被検体101内に液体を導入した液体にカプセル型内視鏡10を浮かせた状態でカプセル型内視鏡10を誘導するので、カプセル型内視鏡10を誘導するための磁界生成部25を、被検体101が載置されるベッド20aの下部に配置することができ、カプセル型医療装置誘導システム全体を小型化することが可能となる。
なお、以上説明した実施の形態1においては、カプセル型内視鏡10の両端に撮像部11A、11Bが設けられた複眼カプセルを用いたが、カプセル型内視鏡のいずれか一端に撮像部が設けられた単眼カプセルを用いても良い。この場合、撮像部が設けられた側の端部にカプセル型内視鏡の重心Gの位置を近づけることにより、水面下(水中)のみを撮像するカプセル型内視鏡を実現することができる。一方、撮像部が設けられていない側の端部にカプセル型内視鏡の重心Gを近づけることにより、水面よりも上側の空間のみを撮像するカプセル型内視鏡を実現することができる。
また、以上説明した実施の形態1においては、カプセル型内視鏡10の長軸Laに対して磁化方向Ymが直交するように永久磁石19を配置したが(図6参照)、磁化方向Ymが長軸Laの方向と一致するように永久磁石19を配置しても良い。このとき、重心Gをカプセル型内視鏡10の幾何学的中心Cに対し径方向にずれた位置に設置しても良い。この場合、液体W中においてカプセル型内視鏡10の姿勢を一意に制御することが可能となる。
また、以上説明した実施の形態1においては、磁界を印加しない状態では、カプセル型内視鏡10が長軸Laを鉛直方向に向けた状態で浮揚するように、重心Gを長軸La上に設定した(図7参照)。しかしながら、磁界を印加しない状態で、カプセル型内視鏡10が長軸Laを鉛直方向に対して傾けた状態で浮揚するように、重心Gの位置を長軸Laからずらして設定しても良い。この場合、液体W中においてカプセル型内視鏡10の傾斜角及び方位角を一意に制御することが可能となる。
或いは、カプセル型内視鏡10の重心Gを幾何学的中心Cに対して永久磁石19の磁化方向と異なる方向にずらして設定しても良い。この場合も、液体W中においてカプセル型内視鏡10の方位角及び傾斜角を一意に制御することが可能となる。
また、以上説明した実施の形態1においては、磁界生成部25により、被検体101内に導入されたカプセル型内視鏡10を誘導するための磁界を生成したが、それ以外にも、カプセル型内視鏡10に対して種々の作用を及ぼす磁界を生成しても良い。例えばカプセル型内視鏡10に磁気スイッチを内蔵させ、磁界生成部25により当該磁気スイッチのオン/オフを遠隔的に行うようにしても良い。
また、以上説明した実施の形態1においては、誘導装置20が備える体外永久磁石25aの形状を直方体形状としたが、磁化方向と直交する第1の方向の長さが磁化方向の長さより長い永久磁石を、第1の方向に平行な第1の面と対向する領域内にカプセル型内視鏡10を拘束するように構成できれば、多角柱形状、円盤(又は楕円盤)形状、錐台形状、又はこれらの類似する形状といった直方体形状以外の様々な形状の永久磁石を適用しても良い。好ましくは、体外永久磁石の磁化方向と第1の方向とに直交する第2の方向の長さを、第1の方向の長さよりも短くすると良い。体外永久磁石の形状を直方体形状以外とする場合においても、磁化方向並びに第1及び第2の方向における長さに関する条件等の詳細については、実施の形態1において説明したものと同様である。なお、円盤形状や楕円盤形状の永久磁石を用いる場合、磁化方向並びに第1及び第2の方向の長さを、直径や長軸又は短軸の長さで規定しても良い。
(変形例1−1)
次に、実施の形態1の変形例1−1について説明する。
図35(a)は、変形例1−1に係る操作入力部24の正面図であり、図35(b)は、操作入力部24の右側面図であり、図36は、操作入力部24の各構成部位の操作によって指示されるカプセル型内視鏡10の動作内容の他の例を示す図である。
操作入力部24の各操作とカプセル型内視鏡10の誘導操作とは、以下に説明するように、水平面Hpではなくカプセル型内視鏡10の長軸Laとの直交面に沿ってカプセル型内視鏡10を誘導できるように対応付けられていてもよい。以下、カプセル型内視鏡10の長軸Laとの直交面に沿ってカプセル型内視鏡10を誘導した場合の誘導操作に対応するカプセル型内視鏡10の動きについて説明する。
図35(a)に示すように、ジョイスティック62の矢印Y23jに示す上下方向の傾動方向は、図36に示すように、カプセル型内視鏡10が長軸Laとの直交面を矢印Y23のように進むダウン誘導方向又はアップ誘導方向が指示される。操作入力部24から、ジョイスティック62の矢印Y23jの傾動操作に対応する操作情報が制御部28に入力された場合、磁界生成部25は、この操作情報をもとに、ジョイスティック62の傾動方向に応じてカプセル型内視鏡10先端の絶対座標系上における誘導方向及び誘導量を演算し、演算した誘導方向及び誘導量に応じて体外永久磁石25aを並進させるよう、平面位置変更部25b及び鉛直位置変更部25cを制御する。
図35(a)に示すように、ジョイスティック62の矢印Y24jに示す左右方向の傾動方向は、図36に示すように、カプセル型内視鏡10が長軸Laとの直交面を矢印Y24のように進むライト誘導方向又はレフト誘導方向が指示される。操作入力部24から、ジョイスティック62の矢印Y24jの傾動操作に対応する操作情報が制御部28に入力された場合、制御部28は、この操作情報をもとに、ジョイスティック62の傾動方向に応じてカプセル型内視鏡10先端の絶対座標系上における誘導方向及び誘導量を演算し、演算した誘導方向及び誘導量に応じて体外永久磁石25aを並進させるよう、平面位置変更部25bを制御する。
図35(b)に示すように、アップボタン64U又はダウンボタン64Bが矢印Y25j、Y26jのように押圧されることにより、図36に示すように、カプセル型内視鏡10が長軸Laに沿って矢印Y25、Y26のように撮像素子15A、15Bに対して前後に進むフォワード誘導方向又はバックワード誘導方向が指示される。操作入力部24から、アップボタン64U又はダウンボタン64Bの矢印Y25j、Y26jの押圧操作に対応する操作情報が制御部28に入力された場合、制御部28は、この操作情報をもとに、押圧されたボタンに応じて、カプセル型内視鏡10先端の絶対座標系上における誘導方向及び誘導量を演算し、演算した誘導方向及び演算量に応じて体外永久磁石25aを並進させるよう、平面位置変更部25b及び鉛直位置変更部25cを制御する。
なお、図35(a)に示すように、ジョイスティック61の矢印Y21jに示す上下方向の傾動方向は、図36の矢印Y21のようにカプセル型内視鏡10の先端が鉛直軸Azを通るように首を振るティルティング誘導方向に対応し、ジョイスティック61の矢印Y22jに示す左右方向の傾動方向は、図36の矢印Y22のようにカプセル型内視鏡10が鉛直軸Azを中心として回転するローテーション誘導方向に対応する。
(変形例1−2)
次に、実施の形態1の変形例1−2について説明する。
被検体101内におけるカプセル型内視鏡10の位置検出は、実施の形態1において説明したカプセル型内視鏡10から受信した無線信号の強度に基づく方法の他にも、様々な方法で行っても良い。
例えば、カプセル型内視鏡10に印加された加速度に基づいて、カプセル型内視鏡10の位置を検出する方法を用いても良い。この場合、カプセル型内視鏡10の内部に、カプセル型内視鏡10に印加される加速度を3次元的に検出する加速度センサを設け、加速度センサの検出結果を無線信号に重畳して随時送信する。誘導装置20は、受信した無線信号に重畳された加速度センサの検出結果に基づき、カプセル型内視鏡10に印加された加速度を積算してカプセル型内視鏡10の位置の相対的な変化量を求め、この変化量から、カプセル型内視鏡10の現在の位置を算出する。
(変形例1−3)
次に、実施の形態1の変形例1−3について説明する。
被検体101内におけるカプセル型内視鏡10の位置検出方法として、交流磁界を検出する方法を用いても良い。この場合、カプセル型内視鏡10の内部に、交流磁界を発生する交流磁界発生部を設ける。一方、誘導装置20側には、交流磁界を検出する磁界センサを複数設けておく。
誘導装置20は、カプセル型内視鏡10が発生する交流磁界を、複数箇所に設置された複数の磁界センサによりそれぞれ検出し、これらの検出結果をもとにカプセル型内視鏡10の位置、方位角、及び傾斜角のうちの少なくとも1つを連続的に算出する。この場合、誘導装置20は、算出したカプセル型内視鏡10の位置、方位角、及び傾斜角のうちの少なくとも1つをもとに、自身が発生する磁界を制御してもよい。また、誘導装置20は、カプセル型内視鏡10の位置が被検体101内の測定領域(磁界生成部25が生成する磁界の領域)内に位置しているか否かを確認し、この確認結果に基づいて遮蔽部26の動作を制御しても良い。例えば、カプセル型内視鏡10が被検体101内の測定領域内に位置している場合、制御部28は遮蔽部26を制御して、磁界生成状態となるように磁性体部材26aを有効磁界領域100の下から抜去させる。一方、カプセル型内視鏡10が被検体101内の測定領域外に位置している場合、制御部28は遮蔽部26を制御して、磁界遮蔽状態となるように磁性体部材26aを有向磁界領域100の下に挿入させる。
(変形例1−4)
次に、実施の形態1の変形例1−4について説明する。
被検体101内におけるカプセル型内視鏡10の位置検出方法として交流磁界を検出する別の方法を説明する。この場合、カプセル型内視鏡10の内部に、交流磁界によって共振するLC回路を設け、誘導装置20側には、交流磁界発生装置、及び交流磁界を検出する磁界センサを複数設けておく。
誘導装置20は、カプセル型内視鏡10が被検体101内の測定領域(磁界生成部25が生成する磁界の領域)内に位置していない状態で、交流磁界発生装置が発生する第1の交流磁界を予め検出しておく。そして、カプセル型内視鏡10が被検体101内の測定領域内に位置しているときに、カプセル型内視鏡10内のLC回路が発生する共振磁界を含んだ第2の交流磁界を検出し、第1の交流磁界の検出値と第2の交流磁界の検出値との差分値から、カプセル型内視鏡10内のLC回路が発生する共振磁界を求める。誘導装置20は、このようにして求めた共振磁界に基づいて、3次元空間におけるカプセル型内視鏡10の位置座標を連続的に算出する。
(変形例1−5)
次に、実施の形態1の変形例1−5について説明する。
図37は、図1に示す磁界生成部25の変形例を示す模式図である。磁界生成部25において磁気を発生する磁気発生部としては、体外永久磁石25aのみを用いる構成に限定されない。
例えば、図37に示すように、体外永久磁石25a−1及びコイル25a−2を有する電磁石によって磁気発生部を実現しても良い。体外永久磁石25a−1は、自身の磁化方向と平行な4つの面の内の1つの面(カプセル対向面PL3)が水平面と平行となるように配置される。
一方、コイル25a−2は、自身が生成する磁界の向きZμが鉛直方向となるように、誘導装置20に固定して配置される。コイル25a−2は、カプセル型内視鏡10の誘導領域内に、体外永久磁石25a−1よりも均一性の高い鉛直方向の磁界を発生すると共に、その磁界強度が、制御部28によって制御可能に構成される。
この場合、体外永久磁石25a−1が発生する水平方向の磁界と、コイル25a−2が発生する鉛直方向の磁界との合成磁界によって、カプセル型内視鏡10の傾斜角が制御される。また、カプセル型内視鏡10の方位角は、旋回角変更部25eによる体外永久磁石25a−1の旋回角変更動作によって制御される。さらに、カプセル型内視鏡10の位置は、平面位置変更部25b及び鉛直位置変更部25cによる体外永久磁石25a−1の並進動作によって制御される。
変形例1−5によれば、電磁石は永久磁石と比較して均一性が高く強力な磁界を誘導領域に生成することができるので、カプセル型内視鏡10の傾斜角及び方位角をより安定的に制御することが可能となる。また、この場合、体外永久磁石25a−1は、主に、カプセル型内視鏡10の位置及び方位角制御のためにのみ用いられるので、体外永久磁石25a−1の形状に対する制約を緩和することが可能となる。
(実施の形態2)
次に、本発明の実施の形態2について説明する。
図38及び図39は、実施の形態2に係るカプセル型医療装置誘導システムの一構成例を模式的に示す一部断面側面図である。図38及び図39に示すように、実施の形態2に係るカプセル型医療装置誘導システム(以下、単に誘導システムという)2は、カプセル型内視鏡10及び誘導装置20Aを備える。図38は、誘導装置20Aが磁界生成状態にある場合を示し、図39は、誘導装置20Aが磁界遮蔽状態にある場合を示している。
誘導装置20Aは、図2に示す駆動部26cの代わりに、磁性体部材26aを弾性力によってスライドさせる弾性部材26eを有する。弾性部材26eとしては、ネジ巻きバネ、皿バネ、板バネ等のバネ部材の他、ゴムなども用いることができる。なお、これ以外の誘導装置20Aの各部の構成については、実施の形態1と同様である。
図38に示すように、誘導装置20Aが磁界生成状態にあるとき、弾性部材26eは収縮し、自身の弾性力により磁性体部材26aを押圧している。このとき、磁性体部材26aは、固定部26dによって位置を固定されている。
図39に示すように、固定部26dを上方に移動させ、磁性体部材26aの固定状態を解除すると、磁性体部材26aは、弾性部材26eから受ける弾性力によりスライドし、有効磁界領域100の下方(磁界生成部25の上方)の凹部20cに移動する。それにより、誘導装置20Aが磁界遮蔽状態に遷移する。なお、磁性体部材26aの固定状態を解除するための固定部26dの操作は、ユーザが手動で行っても良いし、制御部28の制御の下で動作する駆動部により固定部26dを操作するようにしても良い。
以上説明した実施の形態2によれば、弾性部材26eの弾性力により磁性体部材26aを移動させるので、例えば、突然の電源の喪失といった事態が生じても、誘導装置20Aを磁界遮蔽状態に素早く遷移させることが可能となる。
なお、誘導装置20Aを磁界遮蔽状態から磁界生成状態に遷移させる際には、ユーザが手動により磁性体部材26a及び固定部26dの位置を移動させても良いし、制御部28の制御の下で動作する駆動装置を別途設けて、磁性体部材26aを水平方向(図の右方向)に移動させるようにしても良い。
(実施の形態3)
次に、本発明の実施の形態3について説明する。
図40及び図41は、実施の形態3に係るカプセル型医療装置誘導システムの一構成例を模式的に示す一部断面側面図である。図40及び図41に示すように、実施の形態3に係るカプセル型医療装置誘導システム(以下、単に誘導システムという)3は、カプセル型内視鏡10及び誘導装置30を備える。図40は、誘導装置30が磁界生成状態にある場合を示し、図41は、誘導装置30が磁界遮蔽状態にある場合を示している。
誘導システム3の構成は、全体として、図1に示す誘導システム1と同様であり、後述するベッド30a及び遮蔽部31の構成のみが誘導システム1とは異なっている。
誘導装置30には、被検体101が載置される載置台としてのベッド30aが、該ベッド30aを支持する脚部30bに対してスライド可能に設けられている。ベッド30aの主面(被検体載置面)は、被検体101の検査対象部位(例えば胃部)が載置される領域RAと、検査対象ではない部位(例えば下肢)が載置される領域RBとを含んでいる。このベッド30aの脚部30bに対する位置は、領域RAが磁界生成部25と有効磁界領域100との間に挿入された状態(磁界生成状態)の位置と、領域RAが磁界生成部25と有効磁界領域100との間から抜去された状態(磁界遮蔽状態)の位置とで、後述する駆動部31bによって切り替えられる。
脚部30bの内部には、有効磁界領域100に磁界を形成するための磁界生成部25が収容されている。なお、磁界生成部25が生成する磁界の有効磁界領域100以外(例えば、脚部30bの側面方向)の空間への漏れを抑制するため、脚部30bを鉄板等の強磁性体によって形成すると好ましい。
誘導装置30は、磁界生成部25が生成する磁界を有効磁界領域100に対して遮蔽する遮蔽部31を備える。遮蔽部31は、ベッド30aの下面に取り付けられた磁性体部材31aと、制御部28の制御の下で動作し、ベッド30aを磁性体部材31aと共に移動させる駆動部31bとを有する。
磁性体部材31aは、例えば鉄板等の強磁性体によって形成されている。磁性体部材31aの材料やサイズについては、実施の形態1において説明した磁性体部材26aと同様である。このような磁性体部材31aは、ベッド30aの下面に設けられた凹部内に接着や機械締結等により固定されている。磁性体部材31aのベッド30aに対する位置は、磁界遮蔽状態となったときに磁性体部材31aが少なくとも磁界生成部25上の領域を覆うように決定される。実施の形態3においては、領域RBの一部に磁性体部材31aを配置している。
駆動部31bは、磁性体部材31aが取り付けられたベッド30aを、水平面内で1次元的(例えば、被検体101の身長方向)に移動させ、ベッド30aの位置を磁界生成状態における位置と磁界遮蔽状態における位置とで切り替える。
誘導装置30は、図40に示すように、検査時には領域RAが磁界生成部25の上方に位置するようにベッド30aを移動させる。これにより、磁性体部材31aが磁界生成部25と有効磁界領域100との間から抜去され、磁界生成部25が有効磁界領域100に生成した磁界によってカプセル型内視鏡10の磁気誘導が可能な状態(磁気生成状態)となる。一方、誘導装置30は、図41に示すように、検査の前後や緊急停止時には領域RAが磁界生成部25の上方から外れるようにベッド30aを移動させる。これにより、磁性体部材31aが磁界生成部25と有効磁界領域100との間に挿入された磁界遮蔽状態となる。
このように、実施の形態3においては、磁性体部材31aによる磁界の遮蔽とベッド30aの移動とを連動して行うので、磁界遮蔽状態において、カプセル型内視鏡10に対する磁界の作用をさらに低減することが可能となる。
なお、実施の形態3においても、実施の形態2と同様に、駆動部31bの代わりに、バネ等の弾性部材によってベッド30aを移動させるようにしても良い。
(実施の形態4)
次に、本発明の実施の形態4について説明する。
図42及び図43は、実施の形態4に係るカプセル型医療装置誘導システムの一構成例を模式的に示す一部断面側面図である。図42及び図43に示すように、実施の形態4に係るカプセル型医療装置誘導システム(以下、単に誘導システムという)4は、カプセル型内視鏡10及び誘導装置40を備える。図42は、誘導装置40が磁界生成状態にある場合を示し、図43は、誘導装置40が磁界遮蔽状態にある場合を示している。
誘導システム4の構成は、全体として、図1に示す誘導システム1と同様であり、後述するベッド40a及び遮蔽部41の構成のみが誘導システム1とは異なっている。
誘導装置40には、被検体101が載置される載置台としてのベッド40aが、該ベッド40aを支持する脚部40bに対してスライド可能に設けられている。ベッド40aの主面は、被検体101の検査対象部位が載置される領域RAと、検査対象ではない部位が載置される領域RBとを含んでいる。このベッド40aの脚部40bに対する位置は、領域RAが磁界生成部25と有効磁界領域100との間に挿入された状態(磁界生成状態)の位置と、領域RAが磁界生成部25と有効磁界領域100との間から抜去された状態(磁界遮蔽状態)の位置とで、後述する駆動部41eによって切り替えられる。
脚部40bの内部には、有効磁界領域100に磁界を形成するための磁界生成部25が収容されている。なお、磁界生成部25が生成する磁界の有効磁界領域100以外(例えば、脚部40bの側面方向)の空間への漏れを抑制するため、脚部40bを鉄板等の強磁性体によって形成しても良い。
誘導装置40は、磁界生成部25が生成する磁界を有効磁界領域100に対して遮蔽する遮蔽部41を備える。遮蔽部41は、磁性流体41aと、ベッド40aの内部に設けられた磁性流体収容部41bと、ベッド40aの下部に設けられた磁性流体貯蔵部41cと、磁性流体41aを磁性流体収容部41bとの間で連結孔41fを介して移動させるピストン41dと、制御部28の制御の下で動作し、ベッド40aを移動させる駆動部41eとを有する。
磁性流体41aは、磁性を有する流体であり、例えば、マグネタイト等の磁性体粒子を水や油などの液体に分散させたものが用いられる。このような磁性流体41aは、誘導装置40が磁界生成状態にあるとき、磁性流体貯蔵部41cに貯蔵され、誘導装置40が磁界遮蔽状態にあるとき、磁性流体収容部41bに収容される。
磁性流体収容部41bが設けられる領域は、磁界遮蔽状態となったときに磁性流体収容部41bが少なくとも磁界生成部25上の領域を覆うように決定される。実施の形態4においては、領域RB及び領域RAの一部に磁性流体収容部41bを設けている。
磁性流体貯蔵部41cは、磁性流体収容部41bと略等しい体積を有し、例えばベッド40aの端部領域に設けられる。
これらの磁性流体収容部41bと磁性流体貯蔵部41cとは、連結孔41fによって連通している。
ピストン41dは、磁性流体貯蔵部41c内に設けられ、ベッド40aの移動と連動して動作する磁性流体移動手段である。ピストン41dは、磁性流体貯蔵部41cに対して図の右方向に移動することにより、磁性流体貯蔵部41c内の磁性流体41aを、連結孔41fを介して磁性流体収容部41bに押し出す。また、ピストン41dは、磁性流体貯蔵部41cに対して図の左方向に移動することにより、磁性流体収容部41b内の磁性流体41aを、連結孔41fを介して磁性流体貯蔵部41c内に吸引する。
駆動部41eは、ベッド40aを水平面内で1次元的(例えば、被検体101の身長方向)に移動させ、ベッド40aの位置を磁界生成状態における位置と磁界遮蔽状態における位置とで切り替える。このベッド40aの位置の遷移と連動して、ピストン41dの磁性流体貯蔵部41cに対する相対的な位置が変化する。
図42に示すように、誘導装置40は、検査時に領域RAが磁界生成部25の上方に位置するようにベッド40aを移動させる。これにより、磁性流体41aが磁性流体貯蔵部41cに吸引されて、磁性流体収容部41bは空になり、磁界生成部25が有効磁界領域100に生成した磁界によってカプセル型内視鏡10の磁気誘導が可能な状態(磁界生成状態)となる。一方、図43に示すように、誘導装置40は、検査の前後や緊急停止時に領域RAが磁界生成部25の上方から外れるようにベッド40aを移動させる。これにより、磁性流体貯蔵部41c内の磁性流体41aが磁性流体収容部41bに押し出され、磁性流体41aで満たされた磁性流体収容部41bが磁界生成部25と有効磁界領域100との間に挿入される。即ち、磁界遮蔽状態となる。
このように、実施の形態4においては、被検体101の検査対象部位を有効磁界領域100からずらすと共に、磁性流体41aを磁界生成部25と有効磁界領域100との間に挿入することにより磁界遮蔽状態を実現する。従って、磁界遮蔽状態において、カプセル型内視鏡10に対する磁界の作用をさらに低減することが可能となる。
なお、実施の形態4においては、ベッド40aの移動と連動してピストン41dを移動させたが、ベッド40aを脚部40bに対して固定し、ピストン41dのみを移動させることにより、磁性流体収容部41bと磁性流体貯蔵部41cとの間で磁性流体41aを流通させても良い。この場合、磁性流体収容部41bは、ベッド40aの磁界生成部25と有効磁界領域100との間の領域(即ち、領域RAを含む領域)に設けると良い。
(実施の形態5)
次に、本発明の実施の形態5について説明する。
図44は、実施の形態5に係るカプセル型医療装置誘導システムの一構成例を模式的に示す斜視図である。図44に示すように、実施の形態5に係るカプセル型医療装置誘導システム(以下、単に誘導システムともいう)5は、永久磁石19を内蔵し、被検体101内に導入されるカプセル型内視鏡10と、被検体101の両側に対向して配置された永久磁石51、52と、永久磁石51、52をそれぞれ駆動する磁石駆動部53、54と、永久磁石51、52と被検体101との間に挿抜可能に配置された遮蔽板55、56と、遮蔽板55、56をそれぞれ駆動する遮蔽板駆動部57、58と、磁石駆動部53、54及び遮蔽板駆動部57、58の動作を制御する制御部59とを備える。カプセル型内視鏡10は、永久磁石51、52により被検体101内に生成される磁界に拘束され、磁石駆動部53、54により駆動される永久磁石51、52の位置、仰角θ、及び旋回角ψに応じて、その位置、傾斜角、及び方位角を変化させる。
永久磁石51、52は、互いに同種且つ同じ直方体形状を有する永久磁石である。永久磁石51、52は、直方体の4つの面と平行な磁化方向を有し、この内の1つの面(以下、カプセル対向面PL4、PL5という)を被検体101に向け、且つ、磁化方向が互いに鏡面対称となるように平行に配置されている。なお、これらの永久磁石51、52は、カプセル型内視鏡10の誘導を行っていないときには、磁化方向を鉛直方向(Z軸方向)に向けて配置されている。以下、カプセル型内視鏡10の誘導を行っていないときの鉛直方向と直交する方向の内、カプセル対向面PL4、PL5と直交する方向をX軸方向、カプセル対向面PL4、PL5と平行な方向をY軸方向とする。
各永久磁石51、52は、直方体形状の3方向の辺の長さの内、カプセル対向面PL4、PL5に含まれる1方向(磁化方向又はこれと直交する方向。図44においては、Z軸方向またはY軸方向)の辺の長さよりも、カプセル対向面PL4、PL5と直交する方向(図44においてはX軸方向)辺の長さが短い形状を有している。好ましくは、各永久磁石51、52は、直方体形状の3方向の辺の長さの内、カプセル対向面PL4、PL5と直交する方向の長さが最も短い平板形状を有している。
永久磁石51、52は、水平方向及び鉛直方向に揃って並進可能に構成されており、これにより、被検体101内のカプセル型内視鏡10の位置を制御することができる。例えば、永久磁石51、52を鉛直面内で並進させることにより、カプセル型内視鏡10の鉛直面内における位置が変化する。また、永久磁石51、52を水平面内で並進させることにより、カプセル型内視鏡10の水平面内における位置が変化する。
永久磁石51、52は、カプセル対向面PL4、PL5と直交し、各々の中心を通る軸R0、及び、磁化方向と直交するカプセル対向面PL4、PL5内の軸R1、R2に対して回転可能に構成されており、これにより、被検体101内のカプセル型内視鏡10の方位角及び傾斜角を制御することができる。例えば、永久磁石51、52を、互いの位置関係を維持したまま軸R0に対して回転(旋回)させると、カプセル型内視鏡10が追従して方位角を変化させる。また、永久磁石51、52を互いの位置関係を維持したまま軸R1、R2に対してそれぞれ傾斜させると、カプセル型内視鏡10も追従して傾斜する。
さらに、永久磁石51、52は、互いの間の距離を変更可能に構成されており、永久磁石51、52の間の距離を変化させることにより、有効磁界領域100における磁界強度を変化させることができる。誘導システム5においては、永久磁石51、52の間隔が設置可能な範囲で最も広いとき(即ち、有効磁界領域100の磁界強度が最も小さいとき)の各永久磁石51、52の位置が、初期位置として設定されている。
遮蔽板55、56は、鉄板等の強磁性体によって形成された部材である。各遮蔽板55、56は、永久磁石51、52が生成する磁界を有効磁界領域100に対して遮蔽することができる素材及びサイズ(幅×長さ)を有していれば良い。本実施の形態5においては、各永久磁石51、52及び各遮蔽板55、56の主面の面積をほぼ等しくしている。
遮蔽板駆動部57、58は、遮蔽板55、56を鉛直方向に駆動することにより、有効磁界領域100と永久磁石51、52との間に対して遮蔽板55、56を挿抜する。遮蔽板55、56が有効磁界領域100と永久磁石51、52との間に挿入されると、誘導システム5は磁界遮蔽状態となり、遮蔽板55、56が有効磁界領域100と永久磁石51、52との間から抜去されると、誘導システム5は磁界生成状態となる。
このような実施の形態5によれば、被検体101を立位のまま検査することができると共に、誘導システム5における磁界生成状態と磁界遮蔽状態とを切り替えることが可能となる。
なお、実施の形態5のように、被検体101に対して側方に永久磁石を設ける場合には、被検体を座位にて検査を行うカプセル型内視鏡誘導システムを構成することも可能である。この場合には、被検体を座らせる椅子を載置台として用意し、この椅子の背もたれや肘掛部分に永久磁石や遮蔽板を設けても良い。
以上説明した実施の形態は、本発明を実施するための例にすぎず、本発明はこれらに限定されるものではない。また、本発明は、各実施の形態や変形例に開示されている複数の構成要素を適宜組み合わせることによって、種々の発明を生成できる。本発明は、仕様等に応じて種々変形することが可能であり、更に本発明の範囲内において、他の様々な実施の形態が可能であることは、上記記載から自明である。
(付記1)
第1の永久磁石が内部に配置されたカプセル型医療装置が被検体内に導入された状態で、該カプセル型医療装置に対して磁界を印加することにより、前記被検体内において前記カプセル型医療装置を誘導する誘導装置において、
被検体外に設けられた第2の永久磁石であって、磁化方向及び該磁化方向と直交する第1の方向を含む第1の面を有し、該第1の面と対向する領域内に前記カプセル型医療装置を拘束する第2の永久磁石と、
前記第2の永久磁石により前記カプセル型医療装置の誘導が可能な磁界が生成される領域である有効磁界領域に対し、前記第2の永久磁石が生成する磁界を遮蔽する遮蔽手段であって、前記有効磁界領域に対して前記磁界が遮蔽されていない第1の状態と、前記有効磁界領域に対して前記磁界が遮蔽されている第2の状態とを切替可能な遮蔽手段と、
を備えることを特徴とする誘導装置。
(付記2)
前記遮蔽手段は、
磁性体と、
前記磁性体を前記第2の永久磁石と前記有効磁界領域との間に挿抜する駆動手段と、
を有することを特徴とする付記1に記載の誘導装置。
(付記3)
前記磁性体は板状をなすことを特徴とする付記2に記載の誘導装置。
(付記4)
前記駆動手段は、弾性力により前記磁性体を押圧する弾性部材であることを特徴とする付記2に記載の誘導装置。
(付記5)
前記遮蔽手段による前記磁界の遮蔽状態を検出する検出手段と、
前記検出手段による検出結果を報知する報知手段と、
をさらに備えることを特徴とする付記1〜4のいずれか1つに記載の誘導装置。
(付記6)
前記報知手段は、前記検出結果を視覚情報又は聴覚情報によって報知することを特徴とする付記5に記載の誘導装置。
(付記7)
付記1〜6のいずれか1つに記載の誘導装置と、
前記第1の永久磁石が内部に配置されたカプセル型医療装置と、
を備えることを特徴とするカプセル型医療装置誘導システム。
(付記8)
第1の永久磁石が内部に配置されたカプセル型医療装置が被検体内に導入された状態で、該カプセル型医療装置に対して磁界を印加することにより、前記被検体内において前記カプセル型医療装置を誘導する誘導装置と、
前記第1の永久磁石が内部に配置されたカプセル型医療装置と、
を備え、
前記誘導装置は、
被検体外に設けられた第2の永久磁石であって、磁化方向及び該磁化方向と直交する第1の方向を含む第1の面を有し、該第1の面と対向する領域内に前記カプセル型医療装置を拘束する第2の永久磁石を有し、
前記第2の永久磁石の第1の方向の長さが、前記磁化方向の長さよりも長いことを特徴とするカプセル型医療装置誘導システム。
(付記9)
前記カプセル型医療装置が、被検体内に導入される液体内において前記誘導装置によって誘導され、
前記カプセル型医療装置の重心は、前記カプセル型医療装置の幾何学的中心から、前記第1の永久磁石の磁化方向とは異なる方向にずれた位置に配置されていることを特徴とする付記7又は8に記載のカプセル型医療装置誘導システム。