JP5259881B2 - カプセル型医療装置用誘導システムおよび磁界発生装置 - Google Patents
カプセル型医療装置用誘導システムおよび磁界発生装置 Download PDFInfo
- Publication number
- JP5259881B2 JP5259881B2 JP2012534469A JP2012534469A JP5259881B2 JP 5259881 B2 JP5259881 B2 JP 5259881B2 JP 2012534469 A JP2012534469 A JP 2012534469A JP 2012534469 A JP2012534469 A JP 2012534469A JP 5259881 B2 JP5259881 B2 JP 5259881B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- medical device
- capsule medical
- capsule
- plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000002775 capsule Substances 0.000 title claims abstract description 320
- 239000007788 liquid Substances 0.000 claims abstract description 63
- 230000008859 change Effects 0.000 claims abstract description 26
- 230000005415 magnetization Effects 0.000 claims description 21
- 230000005484 gravity Effects 0.000 claims description 12
- 230000004044 response Effects 0.000 claims description 5
- 230000006698 induction Effects 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 29
- 238000001727 in vivo Methods 0.000 description 23
- 238000003384 imaging method Methods 0.000 description 17
- 230000005540 biological transmission Effects 0.000 description 14
- 210000001035 gastrointestinal tract Anatomy 0.000 description 6
- 210000000056 organ Anatomy 0.000 description 5
- 210000002784 stomach Anatomy 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 210000000436 anus Anatomy 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000037406 food intake Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 239000000644 isotonic solution Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
- A61B1/0005—Display arrangement combining images e.g. side-by-side, superimposed or tiled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
Description
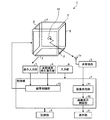
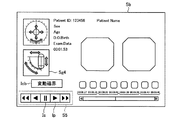
まず、実施の形態1について説明する。図1は、この発明の実施の形態1にかかるカプセル型医療装置用誘導システムの全体構成を示す模式図である。
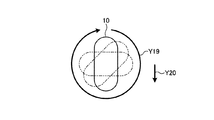
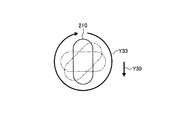
次に、実施の形態2について説明する。実施の形態2においては、カプセル型内視鏡の長軸と交差する方向の磁化を有するカプセル型内視鏡を用いた場合について説明する。
2 磁界発生部
3 送受信部
4,204 制御部
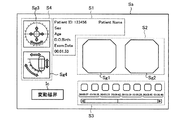
5 表示部
6 入力部
7 操作入力部
8 記憶部
9 変動磁界発生指示部
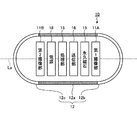
10,210 カプセル型内視鏡
11A 第1撮像部
11B 第2撮像部
12 カプセル型筐体
15 処理部
16 送信部
19 永久磁石
41 画像受信部
42 画像表示制御部
43,243 磁界制御部
Claims (21)
- 永久磁石を備え、被検体内の液体に導入されるカプセル型のカプセル型医療装置と、
前記永久磁石に印加する磁界を発生して前記カプセル型医療装置を誘導するとともに、発生する磁界の方向を3次元空間内で変更可能である磁界発生部と、
前記磁界発生部で発生される磁界を制御する制御部と、
前記制御部において単一の磁界の印加を指示する第一の操作入力部と、
前記制御部において第一及び第二の磁界の同時印加を指示する第二の操作入力部と、
を備え、
前記制御部は、前記第一の操作入力部からの入力指示に対応して、前記磁界発生部に対して単一の磁界を発生させる制御を行う一方、前記第二の操作入力部からの入力指示に対応して、前記カプセル型医療装置が前記液体の液面に位置している状態において、鉛直軸と平行な平面内で磁界が回転する回転磁界からなる磁界を発生している状態において当該平面を、鉛直軸を中心として所定の周期で旋回させるよう制御して第一の磁界を発生させるとともに、前記永久磁石を鉛直下方向に移動させて液中に沈めるための磁気引力を発生する第二の磁界を発生させ、前記第一及び第二の磁界を同時に印加するよう制御することを特徴とするカプセル型医療装置用誘導システム。 - 永久磁石を備え、被検体内の液体に導入されるとともに、密度が前記被検体内に導入される液体の密度とほぼ等しいカプセル型のカプセル型医療装置と、
前記永久磁石に印加する磁界を発生して前記カプセル型医療装置を誘導するとともに、発生する磁界の方向を3次元空間内で変更可能である磁界発生部と、
前記磁界発生部で発生される磁界を制御する制御部と、
を備え、
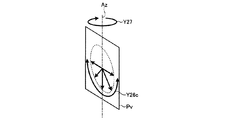
前記制御部は、前記カプセル型医療装置が前記液体の液面に位置している状態において、鉛直軸と平行な平面内で磁界が回転する回転磁界からなる磁界を発生させ前記カプセル型医療装置が該カプセル型医療装置の長軸中心を中心として回転している状態において当該平面を、鉛直軸を中心として所定の周期で旋回させるよう制御して第一の磁界を発生させるとともに、前記永久磁石を鉛直下方向に移動させて液中に沈めるための磁気引力を発生する第二の磁界を発生させ、前記第一及び第二の磁界を同時に印加するよう制御することを特徴とするカプセル型医療装置用誘導システム。 - 前記制御部において単一の磁界の印加を指示する第一の操作入力部と、
前記制御部において前記第一及び第二の磁界の同時印加を指示する第二の操作入力部と、
をさらに備えることを特徴とする請求項2に記載のカプセル型医療装置用誘導システム。 - 前記第一の磁界は、前記カプセル型医療装置の長軸と鉛直軸との成す角と、鉛直軸を通る所定の基準面と前記カプセル型医療装置の長軸および鉛直軸が通る平面との成す角とを、それぞれ周期的に変動させることを特徴とする請求項1に記載のカプセル型医療装置用誘導システム。
- 前記第一の磁界は、前記カプセル型医療装置の長軸と鉛直軸との成す角を90°以上にする磁界を発生することを特徴とする請求項1に記載のカプセル型医療装置用誘導システム。
- 前記第一の磁界は、前記平面で周期的に磁界の方向が回転する回転磁界であり、
前記平面は、鉛直軸を中心に旋回することを特徴とする請求項1に記載のカプセル型医療装置用誘導システム。 - 前記カプセル型医療装置は、前記被検体内に導入される液体内で移動し、密度が前記被検体内に導入される液体の密度とほぼ等しいことを特徴とする請求項1に記載のカプセル型医療装置用誘導システム。
- 前記永久磁石は、前記カプセル型医療装置の長軸と平行である方向の磁化を有することを特徴とする請求項7に記載のカプセル型医療装置用誘導システム。
- 前記第一の磁界は、少なくとも水平方向を向くタイミングを有することを特徴とする請求項8に記載のカプセル型医療装置用誘導システム。
- 前記永久磁石は、前記カプセル型医療装置の長軸に交差する方向の磁化を有し、
前記カプセル型医療装置は、重心位置が、前記カプセル型医療装置の幾何学的中心から前記永久磁石の磁化と異なる方向に移動させた位置であることを特徴とする請求項7に記載のカプセル型医療装置用誘導システム。 - 前記永久磁石は、前記カプセル型医療装置の長軸と直交する方向の磁化を有し、
前記第一の磁界は、少なくとも鉛直方向を向くタイミングを有することを特徴とする請求項10に記載のカプセル型医療装置用誘導システム。 - 前記鉛直軸と平行な平面の前記鉛直軸を中心とする旋回の旋回周期は、前記平面内で回転する回転磁界の回転周期よりも長いことを特徴とする請求項1に記載のカプセル型医療装置用誘導システム。
- 永久磁石を備えたカプセル型のカプセル型医療装置に対して磁界を発生する磁界発生装置において、
前記永久磁石に印加する磁界を発生して前記カプセル型医療装置を誘導するとともに、発生する磁界の方向を3次元空間内で変更可能である磁界発生部と、
前記磁界発生部で発生される磁界を制御する制御部と、
を備え、
前記制御部は、前記カプセル型医療装置が液体の液面に位置している状態において、鉛直軸と平行な平面内で磁界が回転する回転磁界からなる磁界を発生させ前記カプセル型医療装置が該カプセル型医療装置の長軸中心を中心として回転している状態において当該平面を、鉛直軸を中心として所定の周期で旋回させるよう制御して第一の磁界を発生させるとともに、前記永久磁石を鉛直下方向に移動させて液中に沈めるための磁気引力を発生する第二の磁界を発生させ、前記第一及び第二の磁界を同時に印加するよう制御することを特徴とする磁界発生装置。 - 前記第一の磁界により、前記カプセル型医療装置の長手方向が水平方向を向く姿勢を経ることにより、液面での前記カプセル型医療装置の拘束を開放することを特徴とする請求項9に記載のカプセル型医療装置用誘導システム。
- 永久磁石を備え、被検体内の液体に導入されるカプセル型のカプセル型医療装置と、
前記永久磁石に印加する磁界を発生して前記カプセル型医療装置を誘導するとともに、発生する磁界の方向を3次元空間内で変更可能である磁界発生部と、
前記磁界発生部で発生される磁界を制御する制御部と、
前記制御部において単一の磁界の印加を指示する第一の操作入力部と、
前記制御部において第一及び第二の磁界の同時印加を指示する第二の操作入力部と、
を備え、
前記カプセル型医療装置の重心は、前記カプセル型医療装置の幾何学中心から前記永久磁石の磁化方向と異なる方向に移動させた位置に配置され、
前記制御部は、前記第一の操作入力部からの入力指示に対応して、前記磁界発生部に対して単一の磁界を発生させる制御を行う一方、前記第二の操作入力部からの入力指示に対応して、前記カプセル型医療装置が前記液体の液面に位置している状態において、前記磁界発生部が前記カプセル型医療装置の重心が前記幾何学中心より下にある状態から、前記幾何学中心より上にある状態になるように、方向が変化する第一の磁界と、前記永久磁石を下方向に移動させて前記液体の液中に沈めるための磁気引力を発生する第二の磁界とを同時に印加するように制御することを特徴とするカプセル型医療装置用誘導システム。 - 前記制御部は、前記第一の磁界の方向が水平面を除く平面内で周期的に変化するように前記磁界発生部を制御することを特徴とする請求項15に記載のカプセル型医療装置用誘導システム。
- 前記制御部は、前記第一の磁界の方向が前記水平面を除く平面内で回転するように前記磁界発生部を制御することを特徴とする請求項16に記載のカプセル型医療装置用誘導システム。
- 前記制御部は、前記第一の磁界が方向を変化させる前記水平面を除く平面内で回転する周波数が3Hz未満となるように前記磁界発生部を制御することを特徴とする請求項17に記載のカプセル型医療装置用誘導システム。
- 前記制御部は、前記第一の磁界により、前記カプセル型医療装置の重心が前記幾何学中心より下にある状態から、前記幾何学中心より上になる状態になる過程で、前記重心が前記幾何学中心より下にある状態に前記カプセル型医療装置が倒れ込むことにより、前記液体の液面での前記カプセル型医療装置の拘束を解放することを特徴とする請求項15に記載のカプセル型医療装置用誘導システム。
- 前記制御部は、前記第一の磁界が方向を変化させる前記水平面を除く平面が鉛直軸を中心として周期的に変化するように前記磁界発生部を制御することを特徴とする請求項16に記載のカプセル型医療装置用誘導システム。
- 前記制御部は、前記第一の磁界が前記水平面を除く平面内で方向が変化する周期が、前記水平面を除く平面が鉛直軸を中心として変化する周期よりも短くなるように前記磁界発生部を制御することを特徴とする請求項20に記載のカプセル型医療装置用誘導システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012534469A JP5259881B2 (ja) | 2011-01-28 | 2012-01-23 | カプセル型医療装置用誘導システムおよび磁界発生装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011016124 | 2011-01-28 | ||
| JP2011016124 | 2011-01-28 | ||
| PCT/JP2012/051354 WO2012102240A1 (ja) | 2011-01-28 | 2012-01-23 | カプセル型医療装置用誘導システムおよび磁界発生装置 |
| JP2012534469A JP5259881B2 (ja) | 2011-01-28 | 2012-01-23 | カプセル型医療装置用誘導システムおよび磁界発生装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5259881B2 true JP5259881B2 (ja) | 2013-08-07 |
| JPWO2012102240A1 JPWO2012102240A1 (ja) | 2014-06-30 |
Family
ID=46580807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012534469A Active JP5259881B2 (ja) | 2011-01-28 | 2012-01-23 | カプセル型医療装置用誘導システムおよび磁界発生装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8734329B2 (ja) |
| EP (1) | EP2656773B1 (ja) |
| JP (1) | JP5259881B2 (ja) |
| CN (1) | CN103281949B (ja) |
| WO (1) | WO2012102240A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2481337B1 (en) * | 2010-03-26 | 2014-08-06 | Olympus Medical Systems Corp. | Capsule type medical device guidance system and method |
| CN103222842B (zh) * | 2013-04-18 | 2015-09-09 | 安翰光电技术(武汉)有限公司 | 一种控制胶囊内窥镜在人体消化道运动的装置及方法 |
| CN106963327A (zh) * | 2017-04-14 | 2017-07-21 | 深圳市资福技术有限公司 | 一种胶囊式内窥镜 |
| CN113116279A (zh) * | 2021-04-20 | 2021-07-16 | 河南工学院 | 磁控胶囊机器人的磁耦合启动控制装置、系统及方法 |
| CN113647893B (zh) * | 2021-08-13 | 2022-06-10 | 元化智能科技(深圳)有限公司 | 无线胶囊内窥镜的自主导航系统、设备及介质 |
| CN113475997B (zh) * | 2021-08-13 | 2022-07-22 | 元化智能科技(深圳)有限公司 | 无线胶囊内窥镜的往复旋转驱动系统、设备及介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004529718A (ja) * | 2001-05-20 | 2004-09-30 | ギブン・イメージング・リミテッド | 浮揚可能な生体内センシング装置 |
| JP2006263167A (ja) * | 2005-03-24 | 2006-10-05 | Olympus Corp | 医療装置制御システム |
| WO2007077922A1 (ja) * | 2005-12-28 | 2007-07-12 | Olympus Medical Systems Corp. | 被検体内導入システムおよび被検体内観察方法 |
| JP2010017555A (ja) * | 2008-07-08 | 2010-01-28 | Olympus Medical Systems Corp | カプセル型医療装置誘導システム |
| JP2010142388A (ja) * | 2008-12-18 | 2010-07-01 | Olympus Medical Systems Corp | 被検体内導入装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6950732B2 (en) | 2000-09-15 | 2005-09-27 | New York Air Brake Corproation | Car control device electronics |
| IL143259A (en) | 2001-05-20 | 2006-08-01 | Given Imaging Ltd | A method of moving a bone in the colon |
| JP3917885B2 (ja) * | 2002-04-08 | 2007-05-23 | オリンパス株式会社 | カプセル内視鏡システム |
| JP4503930B2 (ja) * | 2003-01-30 | 2010-07-14 | オリンパス株式会社 | 医療装置 |
| JP4153845B2 (ja) | 2003-08-11 | 2008-09-24 | オリンパス株式会社 | 医療装置誘導システム |
| US7623904B2 (en) | 2003-08-06 | 2009-11-24 | Olympus Corporation | Medical apparatus, medical apparatus guide system, capsule type medical apparatus, and capsule type medical apparatus guide apparatus |
| DE10340925B3 (de) * | 2003-09-05 | 2005-06-30 | Siemens Ag | Magnetspulensystem zur berührungsfreien Bewegung eines magnetischen Körpers in einem Arbeitsraum |
| DE10343494B4 (de) * | 2003-09-19 | 2006-06-14 | Siemens Ag | Magnetisch navigierbare Einrichtung für den Einsatz auf dem Gebiet der medizinischen Endoskopie |
| JP4891924B2 (ja) * | 2005-12-27 | 2012-03-07 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置誘導システム及びその制御方法 |
| AU2006347875B2 (en) * | 2006-09-06 | 2010-10-28 | Olympus Corporation | Medical device control system |
| US20100010306A1 (en) * | 2008-07-08 | 2010-01-14 | Olympus Medical Systems Corp. | System for guiding capsule medical device |
| US8241206B2 (en) * | 2008-07-08 | 2012-08-14 | Olympus Medical Systems Corp. | System for guiding capsule medical device |
| DE102009007513B4 (de) * | 2009-02-05 | 2011-02-10 | Siemens Aktiengesellschaft | Ablösen einer Endoskopiekapsel von einer Oberfläche einer Flüssigkeit |
-
2012
- 2012-01-23 CN CN201280004504.XA patent/CN103281949B/zh active Active
- 2012-01-23 JP JP2012534469A patent/JP5259881B2/ja active Active
- 2012-01-23 WO PCT/JP2012/051354 patent/WO2012102240A1/ja active Application Filing
- 2012-01-23 EP EP12738850.2A patent/EP2656773B1/en not_active Not-in-force
- 2012-07-26 US US13/558,508 patent/US8734329B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004529718A (ja) * | 2001-05-20 | 2004-09-30 | ギブン・イメージング・リミテッド | 浮揚可能な生体内センシング装置 |
| JP2006263167A (ja) * | 2005-03-24 | 2006-10-05 | Olympus Corp | 医療装置制御システム |
| WO2007077922A1 (ja) * | 2005-12-28 | 2007-07-12 | Olympus Medical Systems Corp. | 被検体内導入システムおよび被検体内観察方法 |
| JP2010017555A (ja) * | 2008-07-08 | 2010-01-28 | Olympus Medical Systems Corp | カプセル型医療装置誘導システム |
| JP2010142388A (ja) * | 2008-12-18 | 2010-07-01 | Olympus Medical Systems Corp | 被検体内導入装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130041217A1 (en) | 2013-02-14 |
| CN103281949A (zh) | 2013-09-04 |
| CN103281949B (zh) | 2017-11-21 |
| US8734329B2 (en) | 2014-05-27 |
| EP2656773A4 (en) | 2014-02-26 |
| EP2656773A1 (en) | 2013-10-30 |
| EP2656773B1 (en) | 2016-10-05 |
| JPWO2012102240A1 (ja) | 2014-06-30 |
| WO2012102240A1 (ja) | 2012-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5390284B2 (ja) | カプセル型医療装置誘導システム | |
| JP5475207B1 (ja) | 誘導装置及びカプセル型医療装置誘導システム | |
| JP5259881B2 (ja) | カプセル型医療装置用誘導システムおよび磁界発生装置 | |
| JP5458225B1 (ja) | 誘導装置 | |
| JP5475208B1 (ja) | 磁界発生装置及びカプセル型医療装置誘導システム | |
| EP2371263B1 (en) | Guiding system for capsule type medical device and method for guiding capsule type medical device | |
| JP5118775B2 (ja) | カプセル型医療装置用誘導システム | |
| EP2351513B1 (en) | Capsule medical device guidance system | |
| US9931022B2 (en) | Capsule medical device guidance system | |
| JP6028132B1 (ja) | 誘導装置及びカプセル型医療装置誘導システム | |
| JP6028131B1 (ja) | カプセル型内視鏡システムおよび磁界発生装置 | |
| CN114052621A (zh) | 改善胶囊内窥镜的移动路径的磁控装置 | |
| JP6022112B2 (ja) | カプセル型内視鏡誘導システム、誘導装置、及び誘導装置の作動方法 | |
| WO2016157596A1 (ja) | カプセル型内視鏡誘導システムおよびカプセル型内視鏡誘導装置 | |
| WO2011058802A1 (ja) | カプセル型医療装置用誘導システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5259881 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |