WO2010047357A1 - カプセル型内視鏡システム - Google Patents
カプセル型内視鏡システム Download PDFInfo
- Publication number
- WO2010047357A1 WO2010047357A1 PCT/JP2009/068148 JP2009068148W WO2010047357A1 WO 2010047357 A1 WO2010047357 A1 WO 2010047357A1 JP 2009068148 W JP2009068148 W JP 2009068148W WO 2010047357 A1 WO2010047357 A1 WO 2010047357A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- capsule endoscope
- magnetic field
- subject
- contact
- unit
- Prior art date
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00011—Operational features of endoscopes characterised by signal transmission
- A61B1/00016—Operational features of endoscopes characterised by signal transmission using wireless means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00025—Operational features of endoscopes characterised by power management
- A61B1/00036—Means for power saving, e.g. sleeping mode
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/07—Endoradiosondes
- A61B5/073—Intestinal transmitters
Definitions
- the present invention relates to a capsule endoscope system that is introduced into a subject and guides a capsule endoscope that floats in or is in liquid in the subject.
- capsule-type in-subject introduction apparatuses for example, capsule-type endoscopes
- an imaging function and a wireless communication function have been proposed.
- Intra-subject introduction systems have been developed that acquire images inside the subject.
- a capsule endoscope is swallowed from the subject's mouth and then spontaneously discharged, and then inside the body cavity, for example, inside an organ such as the stomach or small intestine. Is moved according to the peristaltic motion, and functions to capture images in the subject at intervals of 0.5 seconds, for example.
- an image captured by the capsule endoscope is received by an external image display device via an antenna placed on the body surface of the subject.
- This image display device has a wireless communication function and an image memory function for the capsule endoscope, and sequentially stores images received from the capsule endoscope in the subject in the memory.
- the doctor or nurse can observe (examine) the inside of the subject and make a diagnosis by displaying the image accumulated in the image display device, that is, the image in the digestive tract of the subject on the display.
- Patent Document 1 discloses an electric propulsion type capsule type in which local electrical stimulation is applied to a living tissue via an electrode, and the body is moved in the living body using the contraction action of the electrically stimulated living tissue.
- An endoscope is described.
- This capsule endoscope is provided with a force sensor that electrically detects the contact state between the electrode provided on the capsule endoscope body and the living tissue, and the force sensor detects contact between the living tissue and the electrode. Since the current is allowed to flow after confirming the state, the propulsion of the capsule endoscope can be stabilized.
- the capsule endoscope when the capsule endoscope is pushed in a complicated lumen having a large lumen diameter and a large lumen diameter like the large intestine, the capsule endoscope is caught in the cage or progresses. There is a case in which the direction is not known, and it is difficult to perform proper propulsion control while observing the lumen inner wall without omission.
- the position / posture information of the capsule endoscope is acquired by a position detection unit or the like, and the lumen information (position and shape) in the living body acquired in advance or in real time. Etc.), the capsule endoscope can be highly propelled and guided.
- a position detection unit or the like the lumen information (position and shape) in the living body acquired in advance or in real time. Etc.
- the capsule endoscope can be highly propelled and guided.
- such a system needs to perform complicated control in order to perform advanced propulsion and guidance.
- the present invention has been made in view of the above, and is a capsule-type endoscope that allows easy observation of the inside of a lumen with a capsule-type endoscope that floats or is in liquid with simple control.
- An object is to provide a mirror system.
- a capsule endoscope system is introduced into a subject and floats in a liquid in the subject or is in a capsule.
- a capsule endoscope system for guiding an endoscope one or more imaging units provided in the capsule endoscope for imaging the inside of the subject and contact with a lumen inner wall in the subject are detected.
- a magnetic field generation control unit that performs guidance control with respect to the traveling direction of the mirror and performs guidance control for separating the capsule endoscope from the inner wall of the lumen based on the detection result of the contact detection unit. It is characterized by
- the magnetic field generation control unit moves the capsule endoscope upward in the gravity direction and / or based on the detection result of the contact detection unit.
- the guidance control is repeatedly performed downward in the direction of gravity.
- the magnetic field generation control unit is configured to detect the contact when the specific gravity value of the capsule endoscope is near the specific gravity value of the liquid.
- the capsule endoscope is alternately guided downward and stopped in the direction of gravity based on the detection result of the part.
- the magnetic field generation control unit may be a value in the vicinity where the specific gravity value of the capsule endoscope exceeds the specific gravity value of the liquid. Based on the detection result of the contact detection unit, the capsule endoscope is alternately guided upward in the direction of gravity and stopped.
- the magnetic field generation control unit reciprocates the capsule endoscope in the horizontal direction based on the detection result of the contact detection unit. Control is performed.
- the capsule endoscope system according to the present invention is characterized in that, in the above-described invention, the contact detection unit is provided on an outer surface of a casing of the capsule endoscope.
- the capsule endoscope system according to the present invention is characterized in that, in the above-described invention, the contact detection unit is a pressure sensor that detects a contact pressure.
- the contact detection unit is an impedance sensor.
- the capsule endoscope system includes, in the above-described invention, one or more imaging units that are provided in the capsule endoscope and images the inside of the subject, and the contact detection unit includes Contact with the inner wall of the lumen is detected based on dimming information or exposure information when an image is picked up by the image pickup unit.
- the capsule endoscope system includes, in the above-described invention, one or more imaging units that are provided in the capsule endoscope and images the inside of the subject, and the contact detection unit includes Contact with the inner wall of the lumen is detected based on luminance information of an image acquired by the imaging unit.
- the center of gravity of the capsule endoscope is substantially the center of the capsule endoscope.
- the capsule endoscope system according to the present invention is characterized in that, in the above-described invention, the imaging unit is provided at one end or both ends of the capsule endoscope in the axial direction of the cylindrical casing. .
- the magnet is disposed so that the magnetization direction is perpendicular to the axial direction of the cylindrical casing of the capsule endoscope. It is characterized by that.
- the magnet is arranged so that the magnetization direction is parallel to the axial direction of the cylindrical casing of the capsule endoscope. It is characterized by that.
- the magnetic field generation control unit performs control to generate an induced magnetic field that applies rotation of at least 180 degrees to the capsule endoscope. It is characterized by.
- a body position detecting unit that detects the body position of the subject and a position detecting unit that detects a site in the large intestine where the capsule endoscope is located. And based on the body position of the subject detected by the body position detection unit and the part detected by the position detection unit, the body position conversion of the subject is performed so that the part detected by the position detection unit is vertically downward. And a posture guide section for guiding.
- the magnetic field generation control when a capsule endoscope that is introduced into a subject and floats in the liquid in the subject or is in the liquid images the subject with one or more imaging units, the magnetic field generation control is performed. Based on the detection result of contact with the lumen inner wall by the contact detector, the magnetic field generator generates an induced magnetic field for the magnet provided in the capsule endoscope, Since the capsule endoscope is guided by moving the capsule endoscope away from the inner wall of the lumen by performing simple guidance such as downward in the direction of gravity, the capsule endoscope can be propelled in the traveling direction with simple control and liquid The inside of the lumen can be observed without leakage by the capsule endoscope that floats in the liquid or in the liquid.
- FIG. 1 is a schematic diagram showing a configuration of a capsule endoscope system according to Embodiment 1 of the present invention.
- FIG. 2 is a schematic diagram illustrating a configuration of a capsule endoscope.
- FIG. 3 is a diagram showing an external configuration of the capsule endoscope.
- FIG. 4 is a block diagram showing a configuration of the capsule endoscope.
- FIG. 5 is a flowchart showing a guidance control processing procedure for the gravity direction of the capsule endoscope by the magnetic field generation control unit when the specific gravity of the capsule endoscope is smaller than that of the liquid.
- FIG. 6 is a schematic diagram illustrating an example of guidance control by the magnetic field generation control unit.
- FIG. 1 is a schematic diagram showing a configuration of a capsule endoscope system according to Embodiment 1 of the present invention.
- FIG. 2 is a schematic diagram illustrating a configuration of a capsule endoscope.
- FIG. 3 is a diagram showing an external configuration of the capsule endoscope.
- FIG. 7 is a flowchart showing a guidance control processing procedure for the gravity direction of the capsule endoscope by the magnetic field generation control unit when the specific gravity of the capsule endoscope is larger than that of the liquid.
- FIG. 8 is a block diagram showing a configuration of a capsule endoscope according to the second embodiment of the present invention.
- FIG. 9 is a schematic diagram illustrating an example of guidance control of a capsule endoscope by the capsule endoscope system according to the third embodiment of the present invention.
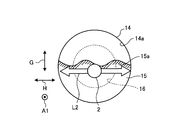
- FIG. 10 is a schematic cross-sectional view showing the guidance range in the gravitational direction of the capsule endoscope when there is little liquid in the large intestine.
- FIG. 11 is a schematic cross-sectional view showing a horizontal guidance range for a capsule endoscope by a capsule endoscope system according to a fourth embodiment of the present invention.
- FIG. 12 is a schematic diagram showing a configuration of a capsule endoscope system according to the fifth embodiment of the present invention.
- FIG. 1 is a schematic diagram showing the overall configuration of a capsule endoscope system according to Embodiment 1 of the present invention.
- FIG. 2 is a schematic diagram showing a configuration of a capsule endoscope applied to the capsule endoscope system.
- FIG. 3 is a diagram showing an external configuration of the capsule endoscope shown in FIG.
- FIG. 4 is a block diagram showing a functional configuration of the capsule endoscope.
- this capsule endoscope system 11 introduces a capsule endoscope 2 that can float in a liquid 15 into the subject 1, specifically, the large intestine 14, orally.
- the in-vivo image of the inner wall of the large intestine 14 is acquired while guiding the capsule endoscope 2 inside the large intestine 14.
- a communication unit 3 that performs wireless communication with the capsule endoscope 2 inside the subject 1 through a plurality of antennas 3 a arranged on the body surface of the subject 1, and imaging by the capsule endoscope 2.
- the display unit 4 for displaying various information such as the in-vivo image of the subject 1, the magnetic field generation unit 5 for generating a magnetic field for guiding the capsule endoscope 2 inside the subject 1, and the magnetic field generation unit 5
- An electric power supply unit 6 for supplying electric power, a moving unit 7 for moving the magnetic field generating unit 5, an input unit 8 for inputting various information such as the type of the capsule endoscope 2 to be introduced, and the subject 1
- a storage unit 9 that stores various types of information such as in-vivo images, and a control unit 10 that controls the above-described components are provided.
- the magnetic field generator 5, the power supply unit 6, and the moving unit 7 constitute a magnetic field generator 17.
- the capsule endoscope 2 is a capsule-shaped medical device formed in a size that can be introduced into the subject 1.
- the capsule endoscope 2 has a wireless communication function for performing wireless communication with the outside.
- the capsule endoscope 2 has an imaging function for capturing an in-vivo image of the subject 1.
- the capsule endoscope 2 sequentially captures in-vivo images of the inner wall of the large intestine 14 while moving in the large intestine 14 by the action of an external magnetic field and the like, and each time an image signal including the obtained in-vivo image is transmitted to the subject 1. Wireless transmission to the outside sequentially.
- the capsule endoscope 2 has contact sensors 30b and 30c (see FIGS. 2 to 4) for detecting contact with the inner wall of the large intestine 14, and whether the contact sensors 30b and 30c are in contact with the inner wall.
- the contact information indicating whether or not is sequentially transmitted to the outside of the subject 1 by radio.
- the communication unit 3 is connected to a plurality of antennas 3a arranged on the body surface of the subject 1, and wirelessly communicates with the capsule endoscope 2 inside the subject 1 via any one of the plurality of antennas 3a. Communicate.
- the communication unit 3 receives the radio signal and the contact information from the capsule endoscope 2 via the plurality of antennas 3a, performs a demodulation process on the received radio signal and the contact information, and performs this radio signal.
- the image signal and contact information included in are extracted.
- the communication unit 3 transmits the extracted image signal, contact information, and the like to the control unit 10.
- the magnetic field generation unit 5 is realized using a plurality of electromagnets, and generates a three-dimensional external magnetic field such as a rotating magnetic field or a gradient magnetic field by the electric power supplied from the power supply unit 6.
- the magnetic field generator 5 can generate a gradient magnetic field at least in the vertical direction.
- This magnetic field generator 5 applies an external magnetic field to the capsule endoscope 2 inside the subject 1 placed on the bed 13, and acts on the magnet (permanent magnet) inside the subject 1 by the action of the external magnetic field.
- a magnetic attractive force is generated to guide the capsule endoscope 2 to a desired body part.
- the moving unit 7 is for moving the magnetic field generator 5 relative to the subject 1 so that an external magnetic field from the magnetic field generator 5 is applied to the capsule endoscope 2 inside the subject 1. is there. More specifically, an XY plane that is substantially parallel to the placement surface of the bed 13 on which the subject 1 is placed is set, and the moving unit 7 coordinates in the XY plane based on the control of the control unit 10. The magnetic field generator 5 is moved to the position. In this case, the moving unit 7 moves the magnetic field generating unit 5 so that the capsule endoscope 2 inside the subject 1 is positioned in a three-dimensional space where an external magnetic field is generated by the magnetic field generating unit 5.
- the input unit 8 is realized by using an input device such as a keyboard, a mouse, and a joystick, and inputs various information to the control unit 10 in accordance with an input operation by a user such as a doctor or a nurse.
- the input unit 8 also functions as an operation unit that operates the control of the control unit 10 based on the display result of the display unit 4.
- the various information input to the control unit 10 by the input unit 8 is, for example, instruction information to be instructed to the control unit 10, patient information of the subject, examination information of the subject, and the like.
- the capsule endoscope 2 Type size, density, etc.
- the control unit 10 includes an image processing unit 10 a that generates an in-vivo image of the subject 1, a position calculation unit 10 b that calculates the position of the capsule endoscope 2 inside the subject 1, and a power supply unit for the magnetic field generation unit 5.
- 6 includes a magnetic field generation control unit 10c that controls the magnetic field intensity generated by the magnetic field generation unit 5 by controlling the energization amount 6.
- the image processing unit 10a acquires the image signal demodulated from the radio signal from the capsule endoscope 2 from the communication unit 3, performs predetermined image processing on the acquired image signal, and converts the acquired image signal into the image signal. Corresponding image information, that is, an in-vivo image of the subject 1 is generated.
- the in-vivo image group generated by the image processing unit 10 a is displayed on the display unit 4 and stored in the storage unit 9.
- the position calculation unit 10b receives the received electric field strength of each antenna when the communication unit 3 sequentially receives wireless signals from the capsule endoscope 2 via the plurality of antennas 3a (for example, the upper three of the plurality of antennas 3a).
- One received electric field intensity) from the communication unit 3 and based on the acquired received electric field intensity and the position information of each antenna in the plurality of antennas 3a, the capsule type inside the subject 1 based on trigonometry or the like
- the current position of the endoscope 2 is calculated.
- the control unit 10 associates the current position information calculated by the position calculation unit 10b with the in-vivo image of the subject 1 captured by the capsule endoscope 2 existing at the current position, and also stores the current position information.
- the magnetic field generation control unit 10c is used for guidance control in the traveling direction of the capsule endoscope 2.
- the in-vivo image of the subject 1 and the current position information of the capsule endoscope 2 associated with each other by the control unit 10 are displayed on the display unit 4 and stored in the storage unit 9.
- the magnetic field generation control unit 10c controls the magnetic field intensity generated by the magnetic field generation unit 5 based on the input guidance instruction information, current position information, and contact information, and performs guidance control of the capsule endoscope 2. .
- the magnetic field generation control unit 10c guides the capsule endoscope 2 with respect to the traveling direction (horizontal direction) that is the luminal axis direction of the large intestine 14 based on the current position information, and based on the contact information. Then, control is performed to generate a combined induction magnetic field that combines the induction of the large intestine 14 with respect to the direction of gravity in the radial direction of the lumen.
- the capsule endoscope 2 includes a capsule casing 20 formed by a cylindrical casing 20a and dome-shaped casings 20b and 20c.
- a pair of contact sensors 30 b and 30 c for detecting contact with the inner wall of the large intestine 14 are provided on the outer surface of the capsule-type housing 20.
- the contact sensors 30b and 30c are formed in a belt shape that goes around the circumferential direction at both ends of the cylindrical casing 20a, and are realized by pressure sensors that detect the pressure of the inner wall that contacts the capsule casing 20.
- the contact sensors 30b and 30c are not limited to two, and may be one or three or more. In short, any contact sensor that can reliably detect contact with the inner wall of the large intestine 14 is acceptable regardless of the posture of the capsule endoscope 2.
- two imaging units 21b and 21c that are provided on both ends in the direction of the cylindrical axis C and capture an in-vivo image of the subject 1 are arranged so that the magnetization direction is a radial direction.
- a magnet 27 realized by a permanent magnet that generates an attractive force in accordance with an external magnetic field generated by the magnetic field generator 5
- a power supply 28 realized by a battery
- a transmitter 29 and an antenna 29a that perform wireless communication with the external communication unit 3
- a capsule a control unit 26 that controls each component in the mold endoscope 2.
- the specific gravity value of the capsule endoscope 2 is set to a value near the specific gravity value of the liquid 15 such as water supplied to the large intestine 14. In this case, when the liquid 15 is water, the specific gravity value of the capsule endoscope 2 is set in the vicinity of less than 1.
- the center of gravity of the capsule endoscope 2 is set substantially at the center of the capsule housing 20 and is not greatly decentered. This prevents the capsule endoscope 2 from maintaining a stable posture with respect to the direction of gravity in the liquid 15, and is easily guided without generating a large drag against the externally induced magnetic field together with the magnet 27. It is to do.
- the capsule-type casing 20 is a capsule-type casing that is formed in a size that can be introduced into the inside of the subject 1, and the dome-shaped casings 20b and 20c in which the openings at both ends of the cylindrical casing 20a form a dome shape. The liquid-tight state is maintained.
- the dome-shaped casings 20b and 20c are optical domes that are transparent to light of a predetermined wavelength band (for example, visible light).
- the cylindrical casing 20a is a substantially opaque casing.
- the imaging units 21b and 21c are for imaging in-vivo images of the subject 1, and are imaging elements realized by an illumination unit 22b or 22c such as an LED, an optical system such as a condenser lens 23b or 23c, and a CCD. 24b, 24c.
- the illuminators 22b and 22c illuminate the subject (specifically, the inner wall of the large intestine 14) through the dome-shaped casings 20b and 20c, and the optical system having the condenser lenses 23b and 23c reflects from the illuminated subject.
- the light is condensed, an optical image of the subject is formed on the light receiving surfaces of the image sensors 24 b and 24 c, and a photoelectrically converted signal is sent to the control unit 26.
- the control unit 26 performs predetermined signal processing on the photoelectrically converted signal to generate an in-vivo image, and transmits the in-vivo image to the outside of the subject 1 through the transmission unit 29 and the antenna 29a.
- the transmission unit 29 wirelessly transmits in-vivo images, contact information, and the like under the control of the control unit 26 via an antenna 29a realized by a coiled antenna.
- the control unit 26 controls each component of the capsule endoscope 2, that is, the illumination units 22b and 22c, the image sensors 24b and 24c, the contact sensors 30b and 30c, and the transmission unit 29.
- the control unit 26 controls the light emission timings and light emission amounts of the illumination units 22b and 22c, controls the image pickup timings and exposure times of the image sensors 24b and 24c, acquires in-vivo image signals of the subject, and performs predetermined signal processing. And control to transmit wirelessly from the transmission unit 29.
- the control unit 26 receives a signal indicating contact with the inner wall from the contact sensors 30b and 30c, the control unit 26 transmits contact information indicating that contact has been made to the outside via the transmission unit 29.
- the control unit 26 may perform control so that the contact sensors 30b and 30c are activated when the capsule endoscope 2 reaches the large intestine 14. Moreover, the control part 26 may perform control which transmits the contact information which shows that it contacted when it contacted the inner wall, and control which always transmits the information of whether it contacted by binary information, for example. You may go.
- the power supply 28 is realized by using a switch circuit, a button-type battery, and the like, and is configured in the capsule endoscope 2 described above under the control of the control unit 26 when switched on by the switch circuit. Supply power to the unit. Further, the control unit 26 may be provided with a pause mode in which processing such as imaging processing and contact detection is not performed until a predetermined condition such as elapse of a predetermined time or arrival at a predetermined position is satisfied.
- the magnetic field generation control unit 10c determines whether or not the capsule endoscope 2 has contacted the inner wall 14a of the large intestine 14 based on contact information from the contact sensors 30b and 30c (step). S101).
- the specific gravity of the capsule endoscope 2 is smaller than the specific gravity of the liquid 15, so when the liquid 15 is filled in the large intestine 14, the capsule endoscope 2 is The large wall 14 is in contact with the inner wall 14a on the upper side (vertically upper side) in the gravity direction G.
- the magnetic field generation control unit 10c repeats the determination in step S101 until contact with the inner wall 14a is detected.
- the capsule endoscope 2 is moved.
- the guidance control is performed downward in the gravity direction G (step S102).
- step S103 it is further determined whether or not contact with the inner wall 14a has been detected.
- the process proceeds to Step S102, and the above-described guidance control in the downward direction of the gravity direction G is repeated.
- step S104 the guidance control in the downward direction of the gravity direction G performed so far is stopped (step S104), and only the buoyancy of the capsule endoscope 2 is used.
- the mold endoscope 2 is moved upward in the gravity direction G.
- step S105 it is determined whether or not to terminate the guidance process. Unless the guidance process is terminated (step S105, No), the process proceeds to step S101 and the above-described guidance process in the gravity direction G is repeated.
- step S105, Yes this process ends.
- the magnetic field generation control unit 10c performs guidance control in the horizontal traveling direction A1 based on the current position information of the capsule endoscope 2 in addition to the guidance processing in the gravity direction G described above.
- the capsule endoscope 2 in the large intestine 14 repeats the contact between the inner wall 14a that is upward in the gravity direction G and the inner wall 14a that is downward in the gravity direction G, and proceeds in the traveling direction A1. It will be. That is, the capsule endoscope 2 moves in a zigzag manner in the large intestine 14 in the traveling direction A1 that is the direction of the luminal axis C1 of the large intestine 14 (see positions P1, P2, and P3 shown in FIG. 6). .
- the inner wall 14a in the large intestine 14 can be imaged without leakage.
- the zigzag can easily overcome the heel 16 in the large intestine 14.
- the magnetic field generation control unit 10c only needs to perform guidance control that combines the guidance control in the downward direction of the gravity direction G and the guidance control in the traveling direction A1, so that it is possible to realize simple guidance control and the gravity direction. Since the upward guidance control of G is not performed, power consumption can be reduced and downsizing of the apparatus can be promoted.
- the entire process of observation (diagnosis) of the large intestine 14 using the capsule endoscope system 11 will be described.
- the subject 1 cleans the inside of the large intestine 14 by drinking a pretreatment agent such as an intestinal washing in advance.
- the capsule endoscope 2 is ingested and moved while observing the inside of the body by a peristaltic motion or the like. Note that it may be set to a pause mode in which observation (image acquisition) is not performed until a predetermined time or a predetermined place is reached.
- the capsule endoscope 2 confirms that the capsule endoscope 2 has reached the large intestine 14 based on the passage of a predetermined time or an observation image or the like, the capsule endoscope 2 performs the zigzag guidance control in the large intestine 14 as described above.
- the in-vivo image and the contact information by the contact sensors 30b and 30c are acquired and transmitted outside the body.
- the capsule endoscope 2 reaches the large intestine 14, the subject 1 appropriately ingests the liquid 15 such as an intestine so that the large intestine 14 is filled with the liquid 15. 5) Further, after the capsule endoscope 2 reaches the large intestine 14, the subject 1 lies on the bed 13 in a supine position as shown in FIG.
- the magnetic field for moving the capsule endoscope 2 in the horizontal direction (traveling direction A1) is an approximate position in the large intestine 14 depending on the in-vivo image acquired by the capsule endoscope 2 or the passage time. And the capsule endoscope 2 may be moved based on the prediction.
- a magnetic field that moves the capsule endoscope 2 in the body axis upward direction (head direction) is generated, and the capsule endoscope 2 is in the transverse colon
- a magnetic field that moves the capsule endoscope 2 in the direction perpendicular to the body axis is generated, and when the capsule endoscope 2 is in the descending colon, the magnetic field that moves the capsule endoscope 2 in the lower direction of the body axis.
- the capsule endoscope 2 continues to move horizontally in a certain direction and, as a result, no change appears in the acquired in-vivo image, it is determined that no further progress is made in that direction,
- the horizontal movement in another direction may be performed repeatedly.
- the moving direction of the capsule endoscope 2 may be determined in consideration of the current position information calculated by the position calculation unit 10b, or may be determined only in the following directions.
- the part of the large intestine 14 where the capsule endoscope 2 is currently located is determined based on the elapsed time so far, the direction in which the capsule endoscope 2 is propelled, and the bending through which the capsule endoscope 2 has passed. May be combined as appropriate. For example, 1) When it can be determined that the capsule endoscope 2 is in the ascending colon, This is a case where the advancing direction A1 is a direction on the body axis and / or has not passed through bending (liver curvature) and / or the time after reaching the large intestine 14 is short.
- the advancing direction A1 is a direction perpendicular to the body axis and / or has passed through the bending (liver curvature) once and / or the time after reaching the large intestine 14 is around 10 minutes.
- the capsule endoscope 2 is in the descending colon, This is a case where the advancing direction A1 is the direction below the body axis and / or passes through the bend (liver curvature) twice and / or the time after reaching the large intestine 14 is around 20 minutes.
- the specific gravity of the capsule endoscope 2 is smaller than the specific gravity of the liquid 15 and floats on the liquid 15, but the specific gravity value of the capsule endoscope 2 is set to the value of the liquid 15.
- a value close to the specific gravity value may be set, and the capsule endoscope 2 may be guided in the gravitational direction G only upward in the gravitational direction G so as to advance in the large intestine 14 in a zigzag manner.
- FIG. 7 is a flowchart showing the gravity direction guidance control processing procedure by the capsule endoscope system which is a modification of the first embodiment. 7, first, the magnetic field generation control unit 10c determines whether or not the capsule endoscope 2 has contacted the inner wall 14a of the large intestine 14 based on contact information from the contact sensors 30b and 30c (step). S201). At the time of this first determination process, since the specific gravity of the capsule endoscope 2 is larger than the specific gravity of the liquid 15, when the liquid 15 is filled in the large intestine 14, the capsule endoscope 2 is The large wall 14 is in contact with the inner wall 14a on the lower side (vertical lower side) in the gravity direction G.
- the magnetic field generation control unit 10c repeats the determination in step S201 until contact with the inner wall 14a is detected.
- the capsule endoscope 2 is moved.
- the guidance control is performed upward in the gravity direction G (step S202).
- step S203 it is further determined whether or not contact with the inner wall 14a is detected.
- the process proceeds to Step S202, and the above-described guidance control upward in the gravity direction G is repeated.
- step S203 when the contact with the inner wall 14a is detected (step S203, Yes), the guidance control in the upward direction of the gravity direction G performed so far is stopped (step S204), and the capsule is performed only by the gravity of the capsule endoscope 2.
- the mold endoscope 2 is moved downward in the gravity direction G.
- step S205 it is determined whether or not the guidance process is to be terminated (step S205). Unless the guidance process is terminated (No in step S205), the process proceeds to step S201 and the above-described guidance process in the gravity direction G is repeated. If the guidance process is to be terminated (step S205, Yes), this process is terminated.
- the capsule endoscope 2 moves in a zigzag manner in the large intestine 14 toward the traveling direction A1. Therefore, the inner wall 14a in the large intestine 14 can be imaged without leakage. In addition, the zigzag can easily overcome the heel 16 in the large intestine 14. Further, the magnetic field generation control unit 10c only needs to perform guidance control that combines the guidance control in the upward direction of gravity G and the guidance control in the traveling direction A1, so that simple guidance control can be realized and the direction of gravity can be achieved. Since the downward guidance control of G is not performed, it is possible to reduce power consumption and promote downsizing of the apparatus.
- the magnetic field generation control unit 10c performs the guidance control in the direction of gravity based on the contact information acquired by the contact sensors 30b and 30c.
- the imaging is performed. It is determined whether or not the capsule endoscope 2 is in contact with the inner wall 14a using the control result information of the light control and exposure time control when the units 21b and 21c acquire an image.
- the magnetic field generation control unit 10c performs guidance control in the direction of gravity.
- FIG. 8 is a block diagram showing the configuration of the capsule endoscope of the capsule endoscope system according to the second embodiment of the present invention.
- the control unit 26 includes a light control unit 26a and an exposure time control unit 26b.
- the dimming control unit 26a and the exposure time control unit 26b perform normal imaging control, and the control unit 26 transmits these control results to the control unit 10 side via the transmission unit 29 and the antenna 29a. This is different from the first embodiment.
- the dimming control unit 26a adjusts and controls the light emission amounts of the illumination units 22b and 22c based on the luminance of the acquired image information.
- the exposure time control unit 26b adjusts and controls the exposure time based on the luminance of the acquired image information.
- exposure control only the exposure time is controlled because, in the case of the capsule endoscope 2, the exposure aperture is fixed, so that the exposure amount is controlled only by the exposure time. .
- the control unit 26 transmits the light control information and / or exposure information to the control unit 10 side, and the control unit 10 determines that the capsule endoscope 2 is connected to the inner wall 14a based on the light control information and / or exposure information.
- a contact detection function for determining whether or not the contact has been made and sends the determination result to the magnetic field generation control unit 10c. For example, when the light control value is equal to or less than a predetermined value, the determination of the contact detection function is considered to be close to the inner wall 14a, so that the capsule endoscope 2 is in contact with the inner wall 14a.
- the contact detection function is considered to be close to the inner wall 14a when the exposure time becomes a predetermined value or less, and determines that the capsule endoscope 2 is in contact with the inner wall 14a. Then, the magnetic field generation control unit 10c performs guidance control in the gravity direction G of the capsule endoscope 2 in the same manner as the contact information based on the determination result.
- the contact detection function may be provided to the communication unit 3. In this case, the communication unit 3 transmits the contact detection result to the magnetic field generation control unit 10c.
- dimming information and / or exposure information which is a control result of the existing dimming control unit 26a and / or exposure time control unit 26b is used.
- the present invention is not limited to this.
- the acquired image information may be analyzed to determine whether or not the capsule endoscope 2 has touched the inner wall 14a.
- the image processing unit 10a obtains a region having a high luminance value and a region having a low luminance value from the acquired image region, and the capsule endoscope 2 comes into contact with the inner wall 14a based on the ratio of each region. Judge whether or not. Specifically, when there is a bright part in the upper region of the image, it is considered that the upper side is close to the inner wall 14a.
- the capsule endoscope 2 contacts the inner wall 14a on the upper side in the gravity direction G. It can be determined that Also in this case, since the contact sensors 30b and 30c are not necessary, the capsule endoscope 2 can be reduced in size and weight. Further, at this time, the center of gravity of the capsule endoscope 2 is adjusted so that the vertical relationship between the images picked up by the imaging elements 24b and 24c of the capsule endoscope 2 and the vertical direction of gravity substantially coincide. It may be. In this case, it becomes easier to grasp the vertical relationship from the captured image.
- the capsule endoscope 2 that moves in the large intestine 14 has the longitudinal axis substantially horizontal, but in the third embodiment, a magnetic field generation control unit. 10c further guides and controls the capsule endoscope 2 to rotate in a horizontal plane.
- FIG. 9 is a schematic diagram showing a movement state in the large intestine 14 when the capsule endoscope 2 is guided and controlled by the magnetic field generation control unit 10c including rotation guidance control.
- the capsule endoscope 2 is configured such that the guidance control in the gravity direction G and the guidance control in the traveling direction A1 (the luminal axis C1 direction of the large intestine 14). Are performed in a zigzag manner in the large intestine 14 (see positions P1, P2, and P3 shown in FIG. 9).
- the capsule endoscope 2 is rotated in a horizontal plane. This rotation control may be always rotated, but may be intermittently rotated.
- the capsule endoscope 2 is located at the center (geometric center) of the capsule casing 20 and floats in the liquid 15 with substantially the same specific gravity as the liquid 15.
- the capsule endoscope 2 can be easily rotated without applying a magnetic field.
- the capsule endoscope 2 according to the third embodiment replaces the magnet 27 described above with the cylindrical axis C direction shown in FIG. 2 (that is, a direction perpendicular to the radial direction of the capsule casing 20). And a magnet 37 arranged so that the magnetization directions coincide with each other.
- the in-vivo image acquired by the capsule endoscope 2 becomes less leaky.
- Embodiment 4 Next, a fourth embodiment of the present invention will be described.
- guidance control in the direction of gravity G is performed.
- the movement range L1 in the gravity direction G is the tube of the large intestine 14. Smaller than the cavity diameter. Therefore, in the fourth embodiment, the magnetic field generation control unit 10c performs the guidance control in the horizontal direction H instead of the guidance control in the gravity direction G. That is, guidance control is performed so that the capsule endoscope 2 reciprocally moves in a direction substantially orthogonal to the traveling direction of the capsule endoscope 2.
- the movement range L2 of the capsule endoscope 2 may be made substantially the same as the lumen diameter of the large intestine 14, as in the case of performing the guidance control in the gravity direction G. it can.
- FIG. 12 is a schematic diagram showing a configuration of a capsule endoscope system according to the fifth embodiment of the present invention.
- a camera 40 that captures the entire body of the subject 1
- a body position detection that detects the posture of the subject 1 based on the image captured by the camera 40. 10d, and these function as a body position detection unit.
- the body position guiding unit 10e also includes the body position guiding unit 10e.
- the body position guiding unit 10e detects the body position of the subject 1 detected by the body position detecting unit 10d and the site of the large intestine 14 where the capsule endoscope 2 is calculated by the position calculating unit 10b.
- guide information for guiding the displacement of the subject 1 is generated.
- the guidance information is output from the audio output unit 41 as audio guidance for posture change.
- the body position guiding unit 10e is, for example, when the body position of the subject 1 is lying on the back on the bed 13 as shown in FIG. 12 and the capsule endoscope 2 is in the ascending colon. Guide clockwise so that the right side of is down. Thereby, the liquid 15 in the large intestine 14 gathers in the ascending colon, the ascending colon is filled with the liquid 15, and the capsule endoscope 2 can perform a large zigzag progression in the large intestine 14.
- the camera 40 is used as the body position sensor.
- the present invention is not limited to this.
- the body position may be detected based on a weight sensor or a temperature sensor arranged on the bed.
- the capsule endoscope 2 has the two imaging units 21b and 21c.
- the present invention is not limited to this and may have only one imaging unit.
- contact sensors 30b and 30c described above are pressure sensors, the present invention is not limited thereto, and may be impedance sensors that detect changes in electrical resistance.
- the position of the center of gravity is substantially the center of the capsule-type casing 20, but the present invention is not limited to this.
- the longitudinal axis of the capsule-type casing 20 is the gravity direction or the center of gravity direction.
- the position of the center of gravity may be shifted so as to be inclined with respect to the angle.
- the contact sensor is preferably provided at a position where contact with the upper and lower inner walls 14a in the gravity direction G can be reliably detected.
- the capsule endoscope 2 is taken orally.
- a capsule endoscope 2 may be introduced.
- the time until reaching the large intestine as in the case of oral intake can be reduced, the examination time can be shortened.
- the large intestine is washed transanally (colon hydrotherapy)
- the large intestine can be directly washed, so that it can be washed more reliably.
- the liquid in the large intestine is insufficient for expanding the lumen, the liquid can be added transanally, so that an optimal lumen state can be easily created.
- the capsule endoscope system according to the present invention is useful for observing the inside of a subject using the capsule endoscope.
- the capsule endoscope system floats in the liquid or in the liquid with simple control.
- the present invention is suitable for a capsule endoscope system in which a lumen can be observed without omission by a certain capsule endoscope.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Robotics (AREA)
- Endoscopes (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
Description
図1は、この発明の実施の形態1であるカプセル型内視鏡システムの全体構成を示す模式図である。また、図2は、このカプセル型内視鏡システムに適用されるカプセル型内視鏡の構成を示す模式図である。さらに、図3は、図2に示したカプセル型内視鏡の外観構成を示す図である。また、図4は、カプセル型内視鏡の機能構成を示すブロック図である。
1)まず、被検体1は、事前に洗腸液などの前処置剤を飲み、大腸14内を綺麗にする。
2)その後、カプセル型内視鏡2を摂取し、蠕動運動などによって体内を観察しながら移動する。なお、所定の時間あるいは所定の場所に到達するまで、観察(画像取得)を行わない休止モードに設定してもよい。
3)カプセル型内視鏡2は、所定時間経過、あるいは観察画像などによってカプセル型内視鏡2が大腸14に到達したことを確認すると、上述した大腸14内のジグザグ誘導制御によって、大腸14内の体内画像と接触センサ30b,30cによる接触情報とを取得し、体外に送信する。
4)なお、カプセル型内視鏡2が大腸14に到達した頃に、大腸14内が液体15で満たされるように、被検体1は、適宜洗腸剤などの液体15を摂取する。
5)また、カプセル型内視鏡2が大腸14に到達した後、被検体1は、図1に示すようにベッド13に仰向けに寝て、大腸14がほぼ水平となるような姿勢をとる。
6)なお、カプセル型内視鏡2を水平方向(進行方向A1)に移動させる磁界は、カプセル型内視鏡2が取得している体内画像あるいは通過時間によって、大腸14内でのおおよその位置を予測し、この予測に基づき、カプセル型内視鏡2を移動させればよい。たとえば、カプセル型内視鏡2が上行結腸にある場合、体軸上方向(頭方向)にカプセル型内視鏡2を移動させる磁界を発生させ、カプセル型内視鏡2が横行結腸にある場合、体軸と垂直な方向にカプセル型内視鏡2を移動させる磁界を発生させ、カプセル型内視鏡2が下行結腸にある場合、体軸下方向にカプセル型内視鏡2を移動させる磁界を発生させればよい。あるいは、カプセル型内視鏡2に対して一定方向の水平移動を継続して行い、その結果、取得される体内画像に変化が現れなかった場合、その方向にはそれ以上進まないと判断し、別の方向に水平移動を行わせることを繰り返し行うようにしてもよい。
1)カプセル型内視鏡2が上行結腸にあると判断できる場合は、
進行方向A1が体軸上方向である、および/または屈曲(肝湾曲)を一度も通過していない、および/または大腸14到達後の時間が短い場合である。
2)カプセル型内視鏡2が横行結腸にあると判断できる場合は、
進行方向A1が体軸と垂直方向である、および/または屈曲(肝湾曲)を一度通過している、および/または大腸14到達後の時間が10分前後である場合である。
3)カプセル型内視鏡2が下行結腸にあると判断できる場合は、
進行方向A1が体軸下方向である、および/または屈曲(肝湾曲)を二度通過している、および/または大腸14到達後の時間が20分前後である場合である。
つぎに、この発明の実施の形態2について説明する。上述した実施の形態1では、接触センサ30b,30cが取得した接触情報をもとに、磁界発生制御部10cが重力方向の誘導制御を行うようにしていたが、この実施の形態2では、撮像部21b,21cが画像取得を行う際の調光制御や露光時間制御の制御結果情報を用いて、カプセル型内視鏡2が内壁14aに接触したか否かを判断し、この判断結果をもとに、磁界発生制御部10cが重力方向の誘導制御を行うようにしている。
つぎに、この発明の実施の形態3について説明する。上述した実施の形態1,2では、いずれも大腸14内を移動するカプセル型内視鏡2は、長手方向の軸がほぼ水平に向いていたが、この実施の形態3では、磁界発生制御部10cが、さらにカプセル型内視鏡2を水平面内で回転するように誘導制御している。
つぎに、この発明の実施の形態4について説明する。上述した実施の形態1~3では、いずれも重力方向Gの誘導制御を行うようにしていた。ここで、図10に示すように、大腸14内の液体15が大腸内14に満たない場合(大腸14内における液面15aの位置を参照)、重力方向Gの移動範囲L1が大腸14の管腔径に比して小さくなる。そこで、この実施の形態4では、磁界発生制御部10cが、重力方向Gの誘導制御に替えて、水平方向Hの誘導制御を行うようにしている。すなわち、カプセル型内視鏡2の進行方向に略直交する方向に、往復の繰り返し移動をするように誘導制御を行っている。この場合、図11に示すように、重力方向Gの誘導制御を行ったときと同じように、カプセル型内視鏡2の移動範囲L2を、大腸14の管腔径とほぼ同じにすることができる。
つぎに、この発明の実施の形態5について説明する。この実施の形態5では、カプセル型内視鏡2が大腸14内で液体15に満たされるように、被検体1の体位を変化させる案内を行うようにしている。
2 カプセル型内視鏡
3 通信部
3a,29a アンテナ
4 表示部
5 磁界発生部
6 電力供給部
7 移動部
8 入力部
9 記憶部
10,26 制御部
10a 画像処理部
10b 位置算出部
10c 磁界発生制御部
10d 体位検出部
10e 体位案内部
11 カプセル型内視鏡システム
13 ベッド
14 大腸
14a 内壁
15 液体
15a 液面
16 襞
17 磁界発生装置
20 カプセル型筐体
20a 筒状筐体
20b,20c ドーム形状筐体
21b,21c 撮像部
22b,22c 照明部
23b,23c 集光レンズ
24b,24c 撮像素子
26a 調光制御部
26b 露光時間制御部
27,37 磁石
28 電源
29 送信部
30b,30c 接触センサ
40 カメラ
41 音声出力部
Claims (17)
- 被検体内に導入され、該被検体内で液体に浮いたあるいは液体中にあるカプセル型内視鏡を誘導するカプセル型内視鏡システムにおいて、
前記被検体内の管腔内壁への接触を検出する接触検出部と、
前記カプセル型内視鏡に設けられた磁石と、
前記被検体外部から前記磁石に対して誘導磁界を発生する磁界発生装置と、
前記管腔軸方向である前記カプセル型内視鏡の進行方向に対する誘導制御を行うとともに、前記接触検出部の検出結果をもとに、前記カプセル型内視鏡を前記管腔内壁から離隔させる誘導制御を行う磁界発生制御部と、
を備えたことを特徴とするカプセル型内視鏡システム。 - 前記磁界発生制御部は、前記接触検出部の検出結果をもとに、前記カプセル型内視鏡を重力方向上向きおよび/または重力方向下向きに繰り返し誘導制御を行うことを特徴とする請求項1に記載のカプセル型内視鏡システム。
- 前記磁界発生制御部は、前記カプセル型内視鏡の比重値が前記液体の比重値未満近傍である場合、前記接触検出部の検出結果をもとに、前記カプセル型内視鏡を重力方向下向きへの誘導と誘導停止とを交互に行うことを特徴とする請求項2に記載のカプセル型内視鏡システム。
- 前記磁界発生制御部は、前記カプセル型内視鏡の比重値が前記液体の比重値を超えた近傍の値である場合、前記接触検出部の検出結果をもとに、前記カプセル型内視鏡を重力方向上向きの誘導と誘導停止とを交互に行うことを特徴とする請求項2に記載のカプセル型内視鏡システム。
- 前記磁界発生制御部は、前記接触検出部の検出結果をもとに、前記カプセル型内視鏡を水平方向に往復誘導制御を行うことを特徴とする請求項1に記載のカプセル型内視鏡システム。
- 前記接触検出部は、前記カプセル型内視鏡の筐体外面に設けられたことを特徴とする請求項1に記載のカプセル型内視鏡システム。
- 前記接触検出部は、接触圧力を検出する圧力センサであることを特徴とする請求項6に記載のカプセル型内視鏡システム。
- 前記接触検出部は、インピーダンスセンサであることを特徴とする請求項6に記載のカプセル型内視鏡システム。
- 前記カプセル型内視鏡に設けられ前記被検体内を撮像する1以上の撮像部を備え、
前記接触検出部は、前記撮像部による画像撮像時における調光情報または露光情報をもとに前記管腔内壁への接触を検出することを特徴とする請求項1に記載のカプセル型内視鏡システム。 - 前記カプセル型内視鏡に設けられ前記被検体内を撮像する1以上の撮像部を備え、
前記接触検出部は、前記撮像部によって取得された画像の輝度情報をもとに前記管腔内壁への接触を検出することを特徴とする請求項1に記載のカプセル型内視鏡システム。 - 前記カプセル型内視鏡の重心は、該カプセル型内視鏡のほぼ中心であることを特徴とする請求項1に記載のカプセル型内視鏡システム。
- 前記撮像部は、前記カプセル型内視鏡の筒状筐体軸方向の一端または両端に設けられたことを特徴とする請求項9に記載のカプセル型内視鏡システム。
- 前記撮像部は、前記カプセル型内視鏡の筒状筐体軸方向の一端または両端に設けられたことを特徴とする請求項10に記載のカプセル型内視鏡システム。
- 前記磁石は、磁化方向が前記カプセル型内視鏡の筒状筐体軸方向に垂直な方向になるように配置されることを特徴とする請求項1に記載のカプセル型内視鏡システム。
- 前記磁石は、磁化方向が前記カプセル型内視鏡の筒状筐体軸方向に平行な方向になるように配置されることを特徴とする請求項1に記載のカプセル型内視鏡システム。
- 前記磁界発生制御部は、前記カプセル型内視鏡に少なくとも180度以上の回転を与える誘導磁界を発生させる制御を行うことを特徴とする請求項15に記載のカプセル型内視鏡システム。
- 被検体の体位を検出する体位検出部と、
前記カプセル型内視鏡が位置する大腸内の部位を検出する位置検出部と、
前記体位検出部が検出した被検体の体位および前記位置検出部が検出した部位をもとに、前記位置検出部が検出した部位が鉛直下方となるように、前記被検体の体位変換を案内する体位案内部と、
を備えたことを特徴とする請求項1に記載のカプセル型内視鏡システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009801401321A CN102176855B (zh) | 2008-10-24 | 2009-10-21 | 胶囊型内窥镜系统 |
| EP09822054A EP2338402A4 (en) | 2008-10-24 | 2009-10-21 | CAPSUED ENDOSCOPY SYSTEM |
| JP2010516324A JP4625146B2 (ja) | 2008-10-24 | 2009-10-21 | カプセル型内視鏡システム |
| US12/761,826 US8449454B2 (en) | 2008-10-24 | 2010-04-16 | Capsule endoscope system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008274737 | 2008-10-24 | ||
| JP2008-274737 | 2008-10-24 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US12/761,826 Continuation US8449454B2 (en) | 2008-10-24 | 2010-04-16 | Capsule endoscope system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010047357A1 true WO2010047357A1 (ja) | 2010-04-29 |
Family
ID=42119394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/068148 WO2010047357A1 (ja) | 2008-10-24 | 2009-10-21 | カプセル型内視鏡システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8449454B2 (ja) |
| EP (1) | EP2338402A4 (ja) |
| JP (1) | JP4625146B2 (ja) |
| CN (1) | CN102176855B (ja) |
| WO (1) | WO2010047357A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2626001A1 (en) * | 2010-10-08 | 2013-08-14 | Olympus Corporation | Biological information acquisition device |
| CN103561629A (zh) * | 2011-05-27 | 2014-02-05 | 奥林巴斯株式会社 | 内窥镜装置 |
| WO2016157583A1 (ja) * | 2015-03-30 | 2016-10-06 | オリンパス株式会社 | カプセル型内視鏡システムおよび磁界発生装置 |
| JP2016533864A (ja) * | 2013-10-22 | 2016-11-04 | キャプソ・ヴィジョン・インコーポレーテッド | マルチ密度相を有するカプセル装置に用いられるシステム及び方法 |
| JP2016195772A (ja) * | 2016-06-08 | 2016-11-24 | オリンパス株式会社 | 内視鏡装置の合焦制御装置、内視鏡装置及び内視鏡装置の合焦制御方法 |
| CN106725271A (zh) * | 2016-12-21 | 2017-05-31 | 重庆金山医疗器械有限公司 | 胶囊内窥镜在生物体内自动越障的方法及系统 |
| JP2017185348A (ja) * | 2017-07-19 | 2017-10-12 | キャプソ・ヴィジョン・インコーポレーテッド | マルチ密度相を有するカプセル装置に用いられるシステム及び方法 |
| CN110772205A (zh) * | 2014-03-17 | 2020-02-11 | 直观外科手术操作公司 | 用于组织接触检测和用于自动曝光和照明控制的系统和方法 |
| JP2023524320A (ja) * | 2020-04-08 | 2023-06-09 | 上▲海▼安▲翰▼医▲療▼技▲術▼有限公司 | カプセル内視鏡の制御方法及びシステム |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5064416B2 (ja) * | 2007-02-05 | 2012-10-31 | オリンパスメディカルシステムズ株式会社 | 表示装置およびこれを用いた被検体内情報取得システム |
| EP2353489A4 (en) * | 2008-11-28 | 2015-11-25 | Olympus Corp | SYSTEM FOR LEADING A CAPTURED MEDICAL DEVICE |
| CN102647934B (zh) * | 2009-11-10 | 2014-10-01 | 奥林巴斯医疗株式会社 | 胶囊型医疗装置用引导系统 |
| JP2012081016A (ja) * | 2010-10-08 | 2012-04-26 | Olympus Corp | 生体情報取得装置 |
| EP2662016A4 (en) * | 2011-01-28 | 2017-04-12 | Olympus Corporation | Capsule endoscope system |
| JP5865606B2 (ja) | 2011-05-27 | 2016-02-17 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| DE102011118811A1 (de) * | 2011-11-15 | 2013-05-16 | Seca Ag | Verfahren und Vorrichtung zur Ermittlung von Bio-Impedanzdaten einer Person |
| CN104302224B (zh) * | 2012-05-07 | 2016-08-24 | 奥林巴斯株式会社 | 引导装置 |
| CN103054542B (zh) * | 2012-12-20 | 2015-02-18 | 深圳市资福技术有限公司 | 一种胶囊内窥镜运动的控制系统 |
| EP2995240B1 (en) | 2014-09-15 | 2019-04-24 | Ankon Medical Technologie (Shanghai) Co., Ltd | Apparatus for controlling the movement of a capsule endoscope in the digestive tract of a human body |
| CN103222842B (zh) | 2013-04-18 | 2015-09-09 | 安翰光电技术(武汉)有限公司 | 一种控制胶囊内窥镜在人体消化道运动的装置及方法 |
| WO2014207738A1 (en) * | 2013-06-27 | 2014-12-31 | Given Imaging Ltd. | Method and system for moving an in-vivo device in the gastrointestinal tract |
| CN103815858A (zh) * | 2014-02-26 | 2014-05-28 | 上海齐正微电子有限公司 | 内置多传感器的胶囊内窥镜 |
| CN106659366B (zh) * | 2014-08-21 | 2018-10-09 | 奥林巴斯株式会社 | 引导装置以及胶囊型医疗装置引导系统 |
| CN105286760A (zh) * | 2015-10-08 | 2016-02-03 | 赵建 | 一种胶囊胃镜 |
| US10478048B2 (en) * | 2016-09-23 | 2019-11-19 | Ankon Medical Technologies (Shanghai) Co., Ltd. | System and method for using a capsule device |
| CN108836241B (zh) * | 2018-06-20 | 2021-02-12 | 北京理工大学 | 一种具有对称侧力感应功能的胶囊机器人 |
| CN109106321B (zh) * | 2018-08-28 | 2021-11-23 | 深圳市资福医疗技术有限公司 | 一种胶囊内窥镜的触壁判断方法、装置及终端设备 |
| CN109645938A (zh) * | 2019-02-26 | 2019-04-19 | 重庆金山医疗器械有限公司 | 一种胶囊内镜巡航控制方法及胶囊内镜系统 |
| US20220248943A1 (en) * | 2019-06-17 | 2022-08-11 | Shenzhen Sibernetics Co., Ltd. | Magnetic control device of capsule endoscope and method for controlling movement of capsule endoscope in tissue cavity |
| CN112336295B (zh) * | 2019-08-08 | 2024-07-05 | 上海安翰医疗技术有限公司 | 磁性胶囊内窥镜的控制方法、装置、存储介质、电子装置 |
| CN110495850A (zh) * | 2019-08-29 | 2019-11-26 | 重庆金山医疗技术研究院有限公司 | 胶囊内镜移动方法、胶囊内镜控制方法、控制设备及系统 |
| CN111035416A (zh) * | 2019-12-17 | 2020-04-21 | 华中科技大学鄂州工业技术研究院 | 一种消化道采样装置和采样系统 |
| CN113080808A (zh) * | 2020-01-09 | 2021-07-09 | 深圳硅基智控科技有限公司 | 分体式内窥镜系统在组织腔体内的图像采集方法 |
| CN117982085A (zh) * | 2020-04-23 | 2024-05-07 | 深圳硅基智控科技有限公司 | 手持式磁控装置以及胶囊内窥镜系统 |
| CN111948798B (zh) * | 2020-08-21 | 2022-04-01 | 上海微创医疗机器人(集团)股份有限公司 | 内窥镜系统及用于检测内窥镜的末端与组织接触的方法 |
| CN114305297B (zh) * | 2021-09-08 | 2022-12-13 | 深圳市资福医疗技术有限公司 | 磁控胶囊内窥镜系统 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55133237A (en) * | 1979-04-06 | 1980-10-16 | Olympus Optical Co | Device for inducing endoscope |
| JPH048343A (ja) * | 1990-04-25 | 1992-01-13 | Olympus Optical Co Ltd | 被検体内挿入装置 |
| JP2005040400A (ja) * | 2003-07-23 | 2005-02-17 | Olympus Corp | 光学的観察プローブ |
| JP2005185544A (ja) | 2003-12-25 | 2005-07-14 | Olympus Corp | カプセル型医療装置及びカプセル型医療装置システム |
| JP2006068501A (ja) | 2004-08-03 | 2006-03-16 | Olympus Corp | 磁気誘導医療システム |
| JP2007167214A (ja) * | 2005-12-20 | 2007-07-05 | Olympus Medical Systems Corp | 体内画像撮影装置および体内画像撮影システム |
| WO2007077922A1 (ja) * | 2005-12-28 | 2007-07-12 | Olympus Medical Systems Corp. | 被検体内導入システムおよび被検体内観察方法 |
| WO2007077768A1 (ja) * | 2005-12-28 | 2007-07-12 | Olympus Medical Systems Corp. | 被検体内観察システムおよび被検体内観察方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5681260A (en) * | 1989-09-22 | 1997-10-28 | Olympus Optical Co., Ltd. | Guiding apparatus for guiding an insertable body within an inspected object |
| JP3756797B2 (ja) * | 2001-10-16 | 2006-03-15 | オリンパス株式会社 | カプセル型医療機器 |
| DE102005032373A1 (de) * | 2005-07-08 | 2006-12-07 | Siemens Ag | Medizinisches System |
| CN101351148B (zh) * | 2005-12-28 | 2010-09-08 | 奥林巴斯医疗株式会社 | 被检体内观察系统 |
| EP1967126B1 (en) * | 2005-12-28 | 2014-05-21 | Olympus Medical Systems Corp. | Container device |
| EP2101630B1 (en) * | 2006-12-28 | 2017-12-13 | Olympus Corporation | Capsule medical apparatus and body-cavity observation method |
-
2009
- 2009-10-21 WO PCT/JP2009/068148 patent/WO2010047357A1/ja active Application Filing
- 2009-10-21 EP EP09822054A patent/EP2338402A4/en not_active Withdrawn
- 2009-10-21 CN CN2009801401321A patent/CN102176855B/zh active Active
- 2009-10-21 JP JP2010516324A patent/JP4625146B2/ja not_active Expired - Fee Related
-
2010
- 2010-04-16 US US12/761,826 patent/US8449454B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55133237A (en) * | 1979-04-06 | 1980-10-16 | Olympus Optical Co | Device for inducing endoscope |
| JPH048343A (ja) * | 1990-04-25 | 1992-01-13 | Olympus Optical Co Ltd | 被検体内挿入装置 |
| JP2005040400A (ja) * | 2003-07-23 | 2005-02-17 | Olympus Corp | 光学的観察プローブ |
| JP2005185544A (ja) | 2003-12-25 | 2005-07-14 | Olympus Corp | カプセル型医療装置及びカプセル型医療装置システム |
| JP2006068501A (ja) | 2004-08-03 | 2006-03-16 | Olympus Corp | 磁気誘導医療システム |
| JP2007167214A (ja) * | 2005-12-20 | 2007-07-05 | Olympus Medical Systems Corp | 体内画像撮影装置および体内画像撮影システム |
| WO2007077922A1 (ja) * | 2005-12-28 | 2007-07-12 | Olympus Medical Systems Corp. | 被検体内導入システムおよび被検体内観察方法 |
| WO2007077768A1 (ja) * | 2005-12-28 | 2007-07-12 | Olympus Medical Systems Corp. | 被検体内観察システムおよび被検体内観察方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2338402A4 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9757010B2 (en) | 2010-10-08 | 2017-09-12 | Olympus Corporation | In vivo information acquiring apparatus |
| EP2626001A4 (en) * | 2010-10-08 | 2014-10-01 | Olympus Corp | DEVICE FOR ACQUIRING BIOLOGICAL INFORMATION |
| EP2626001A1 (en) * | 2010-10-08 | 2013-08-14 | Olympus Corporation | Biological information acquisition device |
| CN103561629A (zh) * | 2011-05-27 | 2014-02-05 | 奥林巴斯株式会社 | 内窥镜装置 |
| JP2016533864A (ja) * | 2013-10-22 | 2016-11-04 | キャプソ・ヴィジョン・インコーポレーテッド | マルチ密度相を有するカプセル装置に用いられるシステム及び方法 |
| CN110772205A (zh) * | 2014-03-17 | 2020-02-11 | 直观外科手术操作公司 | 用于组织接触检测和用于自动曝光和照明控制的系统和方法 |
| JP2020171710A (ja) * | 2014-03-17 | 2020-10-22 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 表示されるシーンの所定の目標輝度を維持するための自動露出及び照明制御のためのシステム |
| JP7376552B2 (ja) | 2014-03-17 | 2023-11-08 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 表示されるシーンの所定の目標輝度を維持するための自動露出及び照明制御のためのシステム |
| US11331156B2 (en) | 2014-03-17 | 2022-05-17 | Intuitive Surgical Operations, Inc. | System and method for tissue contact detection and for auto-exposure and illumination control |
| JP2022009921A (ja) * | 2014-03-17 | 2022-01-14 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 表示されるシーンの所定の目標輝度を維持するための自動露出及び照明制御のためのシステム |
| JP6028131B1 (ja) * | 2015-03-30 | 2016-11-16 | オリンパス株式会社 | カプセル型内視鏡システムおよび磁界発生装置 |
| CN106572786B (zh) * | 2015-03-30 | 2018-12-18 | 奥林巴斯株式会社 | 胶囊型内窥镜系统以及磁场产生装置 |
| WO2016157583A1 (ja) * | 2015-03-30 | 2016-10-06 | オリンパス株式会社 | カプセル型内視鏡システムおよび磁界発生装置 |
| US10595717B2 (en) | 2015-03-30 | 2020-03-24 | Olympus Corporation | Capsule endoscope system and magnetic field generating device |
| CN106572786A (zh) * | 2015-03-30 | 2017-04-19 | 奥林巴斯株式会社 | 胶囊型内窥镜系统以及磁场产生装置 |
| JP2016195772A (ja) * | 2016-06-08 | 2016-11-24 | オリンパス株式会社 | 内視鏡装置の合焦制御装置、内視鏡装置及び内視鏡装置の合焦制御方法 |
| CN106725271A (zh) * | 2016-12-21 | 2017-05-31 | 重庆金山医疗器械有限公司 | 胶囊内窥镜在生物体内自动越障的方法及系统 |
| JP2017185348A (ja) * | 2017-07-19 | 2017-10-12 | キャプソ・ヴィジョン・インコーポレーテッド | マルチ密度相を有するカプセル装置に用いられるシステム及び方法 |
| JP2023524320A (ja) * | 2020-04-08 | 2023-06-09 | 上▲海▼安▲翰▼医▲療▼技▲術▼有限公司 | カプセル内視鏡の制御方法及びシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4625146B2 (ja) | 2011-02-02 |
| JPWO2010047357A1 (ja) | 2012-03-22 |
| EP2338402A1 (en) | 2011-06-29 |
| CN102176855A (zh) | 2011-09-07 |
| US8449454B2 (en) | 2013-05-28 |
| US20100268026A1 (en) | 2010-10-21 |
| EP2338402A4 (en) | 2013-03-20 |
| CN102176855B (zh) | 2013-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4625146B2 (ja) | カプセル型内視鏡システム | |
| JP5427036B2 (ja) | 体内観察システムおよび体内観察システムの作動方法 | |
| JP5506869B2 (ja) | 被検体内情報取得装置およびカプセル型内視鏡 | |
| US7869856B2 (en) | Encapsulated medical imaging device and method | |
| JP4578740B2 (ja) | カプセル型医療装置 | |
| EP2371263B1 (en) | Guiding system for capsule type medical device and method for guiding capsule type medical device | |
| WO2005063122A1 (ja) | 被検体内位置検出システム | |
| US8540623B2 (en) | Apparatus, system and method to indicate in-vivo device location | |
| WO2005065521A1 (ja) | 被検体内移動状態検出システム | |
| CN211749479U (zh) | 胶囊内窥镜系统 | |
| JP2008521541A (ja) | 生体内電気刺激のデバイス、システム、および方法 | |
| US8206285B2 (en) | Apparatus, system and method to indicate in-vivo device location | |
| JP5112018B2 (ja) | 無線給電システム | |
| JP2008011913A (ja) | カプセル医療装置およびカプセル医療装置システム | |
| JP5248911B2 (ja) | カプセル型医療装置 | |
| JP6022112B2 (ja) | カプセル型内視鏡誘導システム、誘導装置、及び誘導装置の作動方法 | |
| JP2006043276A (ja) | 被検体内画像取得システムおよび被検体内導入装置 | |
| WO2016157596A1 (ja) | カプセル型内視鏡誘導システムおよびカプセル型内視鏡誘導装置 | |
| JP4656824B2 (ja) | 無線型被検体内情報取得装置 | |
| KR20040102927A (ko) | 이동기능을 구비한 캡슐 및 캡슐형 내시경 | |
| JP3884454B2 (ja) | カプセル型医療装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980140132.1 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010516324 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09822054 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2009822054 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009822054 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |