JP5435861B2 - Electronic component mounting apparatus and mounting method - Google Patents
Electronic component mounting apparatus and mounting method Download PDFInfo
- Publication number
- JP5435861B2 JP5435861B2 JP2007322469A JP2007322469A JP5435861B2 JP 5435861 B2 JP5435861 B2 JP 5435861B2 JP 2007322469 A JP2007322469 A JP 2007322469A JP 2007322469 A JP2007322469 A JP 2007322469A JP 5435861 B2 JP5435861 B2 JP 5435861B2
- Authority
- JP
- Japan
- Prior art keywords
- electronic component
- adhesive tape
- substrate
- mounting
- tcp
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies
- H01L24/75—Apparatus for connecting with bump connectors or layer connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01005—Boron [B]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01006—Carbon [C]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01033—Arsenic [As]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01047—Silver [Ag]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01056—Barium [Ba]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01075—Rhenium [Re]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01082—Lead [Pb]
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Wire Bonding (AREA)
- Supply And Installment Of Electrical Components (AREA)
- Devices For Indicating Variable Information By Combining Individual Elements (AREA)
- Folding Of Thin Sheet-Like Materials, Special Discharging Devices, And Others (AREA)
Description
この発明は基板としてのたとえば液晶表示装置に用いられるガラス製のパネルに、電子部品としてのたとえばTCP(Tape Carrier Package)を実装する電子部品の実装装置及び実装方法に関する。 The present invention relates to an electronic component mounting apparatus and mounting method for mounting, for example, a TCP (Tape Carrier Package) as an electronic component on a glass panel used for a liquid crystal display device as a substrate.
たとえば、液晶表示装置を製造する場合、基板としての上記パネルに、電子部品としての上記TCPを実装するための実装装置が用いられる。上記TCPは金型によってキヤリアテープから打ち抜かれた後、所定角度ずつ間欠的に回転駆動されるインデックステーブルに供給される。このインデックステーブルには1回当たりの回転角度に応じた間隔で周方向に複数の吸着ヘッドが設けられている。そして、上記金型によって打ち抜かれたTCPは複数の吸着ヘッドに順次供給される。 For example, when manufacturing a liquid crystal display device, a mounting device for mounting the TCP as an electronic component on the panel as a substrate is used. The TCP is punched from the carrier tape by a mold and then supplied to an index table that is rotationally driven by a predetermined angle. The index table is provided with a plurality of suction heads in the circumferential direction at intervals corresponding to the rotation angle per time. The TCP punched out by the mold is sequentially supplied to a plurality of suction heads.
上記パネルはXYテーブルに位置決め載置されていて、このXYテーブルによってXY方向に駆動されるようになっている。上記インデックステーブルの実装ポジションにおいて、上記TCPに設けられた位置合わせマークと、上記パネルに設けられた位置合わせマークとが撮像カメラによって撮像され、その撮像信号が画像処理部で処理される。そして、画像処理部での処理に基いて、上記TCPの位置合わせマークに上記パネルの位置合わせマークが一致するよう、上記XYテーブルの駆動が制御されて上記パネルが位置決めされるようになっている。 The panel is positioned and placed on an XY table, and is driven in the XY direction by the XY table. At the mounting position of the index table, the alignment mark provided on the TCP and the alignment mark provided on the panel are imaged by the imaging camera, and the imaging signal is processed by the image processing unit. Based on the processing in the image processing unit, the panel is positioned by controlling the driving of the XY table so that the alignment mark of the panel matches the alignment mark of the TCP. .
上記TCPに対して上記パネルが位置決めされると、そのTCPを保持した吸着ヘッドが下降方向に駆動され、TCPを上記パネルに設けられた異方性導電部材からなる粘着テープに加圧して貼着する、つまり実装するようになっている。インデックステーブルを用いて基板にTCPを実装する従来の実装装置は、たとえば特許文献1に開示されている。
When the panel is positioned with respect to the TCP , the suction head holding the TCP is driven in the downward direction, and the TCP is attached to the pressure-sensitive adhesive tape made of an anisotropic conductive member provided on the panel. That is, it is designed to be implemented. A conventional mounting apparatus that mounts TCP on a substrate using an index table is disclosed in, for example,
ところで、特許文献1に開示された実装装置においては、基板にTCPを実装するための粘着テープを、上記基板の一側の長手方向全長にわたって貼着し、そこに上記TCPを所定間隔で実装するようにしている。
By the way, in the mounting apparatus disclosed in
そのため、粘着テープの、所定間隔で貼着されたTCPの間に位置する部分は、TCPの実装に必要ない部分となるから、その部分が無駄になり、コスト上昇につながるということがある。 For this reason, the portion of the adhesive tape located between the TCPs attached at a predetermined interval becomes a portion that is not necessary for mounting the TCP, so that the portion is wasted, leading to an increase in cost.
そこで、最近では基板に粘着テープを貼着せず、TCPに、このTCPの幅寸法に対応する長さで粘着テープを貼着することで、粘着テープの無駄をなくすということが考えられている。 Therefore, recently, it has been considered that the adhesive tape is not attached to the substrate, and the adhesive tape is attached to the TCP with a length corresponding to the width dimension of the TCP, thereby eliminating the waste of the adhesive tape.
その場合、離型テープに貼着された粘着テープをTCPの幅寸法に対応する長さで切断し、その粘着テープを上にして離型テープとともに押し上げ、インデックステーブルの吸着ヘッドに保持されたTCPに貼着した後、その粘着テープの下面から離型テープを剥離する。そして、粘着テープの離型テープが剥離された面を基板に貼着することで、上記TCPを基板に実装することになる。 In that case, the adhesive tape affixed to the release tape is cut to a length corresponding to the width dimension of the TCP, the adhesive tape is pushed up with the release tape, and the TCP held by the index table suction head After sticking to, the release tape is peeled from the lower surface of the adhesive tape. And the said TCP is mounted in a board | substrate by sticking the surface by which the release tape of the adhesive tape was peeled off to a board | substrate.
ところで、図8(a)に示すように所定長さに切断された粘着テープ19を、インデックステーブルの吸着ヘッド18に吸着保持されたTCP3に貼着する場合、上記粘着テープ19が貼着された離型テープ20の送り精度や環境の温度・湿度の変化による伸び或いは粘着テープ19を押し上げてTCP3に貼着するときに生じる位置ずれなどによって上記粘着テープ19がTCP3の幅方向に対してずれが生じるということがある。
By the way, when the
そして、そのずれ量ΔXが大きくなり、粘着テープ19がTCP3の幅方向の端部から所定の長さ以上突出すると、その突出部分における粘着テープ19の端部と離型テープ20との粘着力が上記ずれ量ΔXに応じて大きくなるということがある。
And when the deviation | shift amount (DELTA) X becomes large and the
そのような状態で、上記TCP3に貼着された粘着テープ19から離型テープ20を剥離すると、図8(b)に示すように粘着テープ19から離型テープ20が剥離される前に、離型テープ20とともに粘着テープ19の端部がTCP3から剥離してしまう、いわゆる粘着テープ19の捲れが生じることがあるため、そのTCP3を基板に確実に実装できなくなるということになる。
In such a state, when the
この発明は、電子部品に貼着される粘着テープのずれ量が大きくなるのを防止し、電子部品に粘着テープを貼着した後、この粘着テープから離型テープを剥離するときに、粘着テープの端部が電子部品から捲れることがないようにした電子部品の実装装置及び実装方法を提供することにある。 The present invention prevents an increase in the amount of displacement of the adhesive tape attached to the electronic component, and after attaching the adhesive tape to the electronic component, the adhesive tape is peeled off from the adhesive tape. It is an object of the present invention to provide an electronic component mounting apparatus and mounting method in which the end of the electronic component is prevented from falling from the electronic component.
この発明は、 電子部品を粘着テープによって基板に実装する電子部品の実装装置であって、
上記基板を搬送位置決めする第1の搬送手段と、
上記電子部品を受ける受け取りポジション、この受け取りポジションで受けた電子部品に一方の面に離型テープが貼着されて所定長さに切断された粘着テープの他方の面を貼着して上記一方の面から上記離型テープを剥離する貼着剥離ポジション及び離型テープが剥離された粘着テープの一方の面によって上記電子部品を上記基板に実装する実装ポジションのそれぞれに上記電子部品を順次搬送位置決めする第2の搬送手段と、
上記実装ポジションに搬送された上記基板と、上記粘着テープが貼着された電子部品とを撮像する撮像手段と、
この撮像手段の撮像信号に基づいて上記基板の上記電子部品に対するずれ量と、所定長さに切断されて上記電子部品に貼着された上記粘着テープの上記電子部品に対するずれ量とを算出する演算処理手段と、
上記電子部品に対する基板のずれ量に基づいて上記実装ポジションにおける上記電子部品と基板との相対的な位置決めと、上記電子部品に対する粘着テープのずれ量に基づいて上記貼着剥離ポジションにおける上記電子部品と所定長さに切断された粘着テープとの相対的な位置決めとを制御する制御手段と
を具備したことを特徴とする電子部品の実装装置にある。
This invention is an electronic component mounting apparatus for mounting an electronic component on a substrate with an adhesive tape,
First conveying means for conveying and positioning the substrate;
The receiving position for receiving the electronic component, and the electronic component received at the receiving position is attached to the other side of the adhesive tape having a release tape attached to one surface and cut to a predetermined length. The electronic component is sequentially conveyed and positioned at each of a mounting position where the electronic component is mounted on the substrate by one surface of the adhesive tape from which the release tape is peeled off and the adhesive tape from which the release tape is peeled off. A second conveying means;
Imaging means for imaging the substrate transported to the mounting position and the electronic component to which the adhesive tape is attached;
An arithmetic operation for calculating a displacement amount of the substrate with respect to the electronic component and a displacement amount of the adhesive tape cut to a predetermined length and attached to the electronic component based on an imaging signal of the imaging means. Processing means;
Relative positioning of the electronic component and the substrate at the mounting position based on the amount of deviation of the substrate relative to the electronic component, and the electronic component at the sticking / peeling position based on the amount of deviation of the adhesive tape relative to the electronic component An electronic component mounting apparatus comprising: control means for controlling relative positioning with an adhesive tape cut to a predetermined length.
この発明は、 電子部品を粘着テープによって基板に実装する電子部品の実装方法であって、
上記基板を搬送位置決めする工程と、
上記電子部品を受ける受け取りポジション、この受け取りポジションで受けた電子部品に一方の面に離型テープが貼着されて所定長さに切断された粘着テープの他方の面を貼着してから、上記一方の面から上記離型テープを剥離する貼着剥離ポジション及び上記離型テープが剥離された粘着テープの一方の面によって上記電子部品を上記基板に実装する実装ポジションのそれぞれに上記電子部品を順次搬送位置決めする工程と、
上記実装ポジションに搬送された上記基板と上記粘着テープが貼着された電子部品を撮像する工程と、
この撮像した撮像信号に基づいて上記基板の上記電子部品に対するずれ量と、所定長さに切断されて上記電子部品に貼着された上記粘着テープの上記電子部品に対するずれ量とを算出する工程と、
上記電子部品に対する基板のずれ量に基づいて上記実装ポジションにおける上記電子部品と上記基板との相対的な位置決めと、上記電子部品に対する粘着テープのずれ量に基づいて上記貼着剥離ポジションにおける上記電子部品と所定長さに切断された粘着テープとの相対的な位置決めとを制御する工程と
を具備したことを特徴とする電子部品の実装方法にある。
This invention is an electronic component mounting method for mounting an electronic component on a substrate with an adhesive tape,
A step of conveying and positioning the substrate;
The receiving position for receiving the electronic component, the electronic tape received at the receiving position, the release tape is attached to one surface and the other surface of the adhesive tape cut to a predetermined length is attached, The electronic component is sequentially placed on each of the adhesive peeling position for peeling the release tape from one surface and the mounting position for mounting the electronic component on the substrate by one surface of the adhesive tape from which the release tape is peeled off. A process of carrying and positioning;
Imaging the electronic component having the substrate and the adhesive tape adhered to the mounting position, and
Calculating a displacement amount of the substrate with respect to the electronic component and a displacement amount of the adhesive tape cut to a predetermined length and attached to the electronic component based on the captured image signal; ,
And relative positioning between the electronic component and the substrate in the mounted position on the basis of the shift amount of the substrate relative to the electronic component, the electronic component in the attaching peeling position on the basis of the shift amount of the adhesive tape for the electronic component and in the mounting method of electronic components, characterized by comprising the step of controlling the relative positioning of the adhesive tape is cut to length.
この発明によれば、基板と電子部品を撮像し、その撮像信号に基づいて電子部品を基板に対して位置決めすると同時に、電子部品に対する粘着テープのずれ量を検出し、そのずれ量に応じて電子部品に粘着テープを貼着するときの電子部品の位置決めを制御する。 According to this invention, the board and the electronic component are imaged, and the electronic component is positioned with respect to the board based on the imaging signal, and at the same time, the shift amount of the adhesive tape with respect to the electronic component is detected, and the electronic component is detected according to the shift amount. Controls the positioning of the electronic component when sticking the adhesive tape to the component.
そのため、電子部品に対する粘着テープのずれ量が所定以上になるのを防止できるから、電子部品に貼着された粘着テープから離型テープを剥離するとき、粘着テープの端部が電子部品から捲れ上がるのを防止することができる。 For this reason, the amount of displacement of the adhesive tape with respect to the electronic component can be prevented from exceeding a predetermined value. Therefore, when the release tape is peeled off from the adhesive tape attached to the electronic component, the end of the adhesive tape is swollen from the electronic component. Can be prevented.
以下、この発明の実施の形態を図面を参照して説明する。
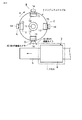
図1はこの発明の一実施の形態の電子部品の実装装置の全体構成を示す概略図である。この実装装置は基板としてのたとえば液晶表示装置用のパネル1を搬送する第1の搬送手段であるパネルテーブル2と、電子部品としてのTCP3を搬送する第2の搬送手段としてのインデックステーブル4を有する。
Embodiments of the present invention will be described below with reference to the drawings.
FIG. 1 is a schematic diagram showing the overall configuration of an electronic component mounting apparatus according to an embodiment of the present invention. This mounting apparatus has a panel table 2 which is a first transport means for transporting, for example, a
上記パネルテーブル2はベース5上にX方向(図1の紙面に直交する方向)に沿って移動可能に設けられたXテーブル6を有する。このXテーブル6は上記ベース5に設けられたX駆動源7によって上記ベース5上をX方向に沿って駆動されるようになっている。
The panel table 2 has an X table 6 provided on a
上記Xテーブル6にはX方向と直交するY方向〔矢印で示す〕に沿って移動可能なYテーブル8が設けられている。このYテーブル8は上記Xテーブル6に設けられたY駆動源9によってY方向に沿って駆動されるようになっている。上記Yテーブル8にはθテーブル10が回転方向に移動可能に設けられ、上記Yテーブル8に設けられたθ駆動源10aによって回転方向に駆動されるようになっている。
The X table 6 is provided with a Y table 8 that is movable along a Y direction (indicated by an arrow) orthogonal to the X direction. The Y table 8 is driven along the Y direction by a Y drive source 9 provided on the X table 6. A θ table 10 is provided on the Y table 8 so as to be movable in the rotation direction, and is driven in the rotation direction by a
そして、このθテーブル10の上面に上記パネル1が供給され、たとえば真空吸着などの手段によって移動不能に保持される。それによって、上記パネル1は上記パネルテーブル2によってXY及びθ方向に対して位置決め可能となっている。なお、θテーブル10はパネル1よりも小さく形成されている。それによって、パネル1は周辺部をθテーブル10の周辺部から突出させている。
And the said
上記インデックステーブル4は、中心に回転軸11が設けられ、この回転軸11はθ駆動源12によって図2に矢印Rで示す時計方向に所定角度ずつ間欠的に回転駆動されるようになっている。この実施の形態では、上記インデックステーブル4は90度の回転角度で間欠駆動されるようになっている。
The index table 4 is provided with a rotating
上記インデックステーブル4の上面には、90度間隔で4つの支持体13が設けられている。図1では2つの支持体13だけを図示し、他の支持体13を省略している。この支持体13は側面形状がL字状をなしていて、その垂直面には可動体14がリニアガイド15によって垂直方向に移動可能に支持されている。
Four
図1に示すように、上記支持体13の上端にはブラケット16が設けられ、このブラケット16には実装シリンダ17が軸線を垂直にし、かつロッド17aの先端を上記可動体14の上端に連結して設けられている。なお、図2においては上記実装シリンダ17の図示を省略している。
As shown in FIG. 1, a
各可動体14の下端面には実装手段として側面形状がL字状の吸着ヘッド18が設けられている。この吸着ヘッド18は、図2にAで示す受け取りポジションで後述する部品供給部21から供給されたTCP3を吸着保持し、上記パネル1に実装するようになっている。なお、インデックステーブル4は上述した受け取りポジションAの他に、B〜Dで示す3つのポジション、つまり合計で4つのポジションを有する。
A
Bは受け取りポジションAで吸着ヘッド18に供給されたTCP3の端子部3a(図5に示す)を図示しないブラシで洗浄する洗浄ポジション、Cは洗浄されたTCP3の端子部3aに図3に示すように離型テープ20に貼着された状態で所定長さに切断された異方性導電部材からなる粘着テープ19を後述するように貼着してから、その粘着テープ19から離型テープ20を剥離する貼着剥離ポジション、Dは端子部3aに粘着テープ19が貼着されたTCP3をパネル1の側辺部の上面に上記粘着テープ19によって実装するための実装ポジションである。
B is a cleaning position for cleaning the
上記部品供給部21は、図1に示すようにキヤリアテープ22から上記TCP3を打ち抜く金型23を有する。この金型23は上下方向に駆動される上型23aと、この上型23aに対向して固定的に配置された下型23bとを有し、上型23aにはポンチ24が設けられ、下型23bには上型23aが下降したときに上記ポンチ24が入り込む貫通孔25が設けられている。
The
上記キヤリアテープ22は上型23aと下型23bとの間に通され、上型23aが下降することで上記TCP3が打ち抜かれ、上昇したときに+Yで示す矢印方向に所定ピッチで送られて新たにTCP3が打ち抜き可能な状態となる。
The
上記下型23bの下方には受け具26が配置されている。この受け具26はXテーブル27に設けられたZθ駆動源28によって上下方向となるZ方向及び回転方向となるθ方向に駆動されるようになっている。上記Xテーブル27はYテーブル29に上記Y方向と直交するX方向に沿って移動可能に設けられている。このYテーブル29には上記Xテーブル27をX方向に沿って駆動するX駆動源31が設けられている。
A receiving
上記Yテーブル29は図1に矢印で示すY方向に沿って配置されたベース32にY方向に沿って移動可能に設けられている。このベース32の一端には上記Yテーブル29をY方向に沿って駆動するY駆動源33が設けられている。このベース32の他端は上記インデックステーブル4の受け取りポジションAの下方に位置している。
The Y table 29 is provided on a base 32 disposed along the Y direction indicated by an arrow in FIG. 1 so as to be movable along the Y direction. One end of the
上記金型23によってキヤリアテープ22から打ち抜かれたTCP3を受け具26が受けて下降すると、Yテーブル29がY駆動源33によってベース32の一端から他端へ駆動される。それによって、TCP3を保持した受け具26が図1に鎖線で示すようにインデックステーブル4の受け取りポジションAの下方に位置決めされる。
When the
受け具26が受け取りポジションAの下方に位置決めされると、上記受け具26が上昇方向に駆動され、可動体14の下端に設けられた吸着ヘッド18によって上記受け具26に保持されたTCP3の端子部3aが設けられた一端部の上面を吸着する。
When the receiving
吸着ヘッド18が受け取りポジションAでTCP3を吸着すると、インデックステーブル4が90度回転駆動され、その吸着ヘッド18が洗浄ポジションBに位置決めされる。洗浄ポジションBでは図示しないブラシによって吸着ヘッド18に吸着保持されたTCP3の端子部3aがブラッシングされる。それによって、端子部3aに付着した汚れが除去される。
When the
洗浄ポジションBでTCP3の汚れが除去されると、インデックステーブル4は90度回転駆動されて上記TCP3は貼着剥離ポジションCに位置決めされる。貼着剥離ポジションCでは、上記TCP3の端子部3aに所定長さに切断された粘着テープ19が貼着される。
When the dirt of the
上記貼着剥離ポジションCは、図3と図4に示すように貼着剥離ポジションCに位置決めされた吸着ヘッド18の下方に対向してこの吸着ヘッド18とほぼ同じ大きさの押圧ブロック34が設けられている。この押圧ブロック34にはヒータ34aが内蔵されている。
As shown in FIGS. 3 and 4, the sticking / peeling position C is provided with a
上記押圧ブロック34は軸線を垂直にして配置された駆動シリンダ35のロッド35aに取付けられ、図3に矢印で示す上下方向に駆動可能となっている。それによって、上記駆動シリンダ35が作動して上記ロッド35aが突出方向に駆動されると、上記押圧ブロック34が上記吸着ヘッド18に向かって上昇する。
The
上記押圧ブロック34の上面には、一方の面に上記粘着テープ19が貼着された離型テープ20が上記粘着テープ19を上に向けて一対のガイドローラ37によってガイドされて図3に矢印で示す方向に走行するようになっている。
On the upper surface of the
上記粘着テープ19が貼着された離型テープ20は供給リール38から繰り出され、巻き取りリール39に巻き取られるようになっている。上記粘着テープ19は、上記押圧ブロック34の上面に対向する位置に搬送されてくる前に、図示しない切断機構によって所定長さに切断され、かつ所定長さに切断された粘着テープ19の隣り合う端部間に隙間19aができるよう、その端部間の部分が除去(中抜き)される。
The
粘着テープ19の所定長さに切断された部分がTCP3の一端部を吸着保持した吸着ヘッド18の下方に位置決めされると、上記駆動シリンダ35が作動してそのロッド35aが突出方向に駆動され、このロッド35aに設けられた押圧ブロック34が離型テープ20の所定長さに切断された粘着テープ19が上面に貼着された部分の下面を押し上げながら上昇する。
When the portion of the
それによって、図4(a)に示すように、所定長さに切断された上記粘着テープ19は上記押圧ブロック34によって吸着ヘッド18に吸着保持されたTCP3の一端部の下面に押圧されながら、この押圧ブロック34に内蔵されたヒータ34aによって加熱されて貼着される。
Thereby, as shown in FIG. 4 (a), while the
そして、図4(b)に示すように、粘着テープ19をTCP3に貼着して押圧ブロック34が元の位置まで下降すると、離型ローラ41が図示せぬ駆動機構によって離型テープ20を下方へ押圧する、矢印−Zで示す下降方向に駆動されてから、矢印+Xで示すTCP3の幅方向一端から他端に向かって駆動される。それによって、上記TCP3に貼着された粘着テープ19から離型テープ20が剥離される。
Then, as shown in FIG. 4B, when the
なお、離型ローラ41はインデックステーブル4が回転したときに、吸着ヘッド18にぶつからないようX方向と直交するY方向に駆動可能となっている。
TCP3に貼着された粘着テープ19から離型テープ20が剥離されると、インデックステーブル4が90度回転され、粘着テープ19が貼着されたTCP3が実装ポジションDに位置決めされる。実装ポジションDには、図2と図5に示すように撮像手段としての第1の撮像カメラ43と第2の撮像カメラ44が配置されている。
The
When the
上記パネル1の上記TCP3が実装される部分には一対の第1の位置合わせマークM1、M2が所定間隔で設けられ、上記TCP3の端子が設けられた一端部の幅方向両端部には上記一対の第1の位置合わせマークM1、M2と同じ間隔で一対の第2の位置合わせマークm1,m2が設けられている。
A pair of first alignment marks M1 and M2 are provided at a predetermined interval on a portion of the
粘着テープ19が貼着されたTCP3が実装ポジションDに位置決めされると、パネル1は予めティーチングされた座標に基づき、TCP3が実装される部位が実装ポジションDに位置決めされたTCP3に接近するようパネルテーブル2によって仮位置決めされる。この状態を図6に示す。
When the
TCP3に対してパネル1が仮位置決めされると、第1の撮像カメラ43が一方の第1の位置合わせマークM1と一方の第2の位置合わせマークm1を第1の視野S1内に収めて撮像する。同様に、第2の撮像カメラ44が他方の第1の位置合わせマークM2と他方第2の位置合わせマークm2を第2の視野S2内に収めて撮像する。
図6に示すように、上記第1の視野S1の一部はTCP3の幅方向一端部から外れた部分を含み、上記第2の視野S2の一部はTCP3の幅方向他端部から外れた部分を含む。
When the
As shown in FIG. 6, a part of the first visual field S1 includes a part deviated from one end of the TCP3 in the width direction, and a part of the second visual field S2 deviated from the other end in the width direction of the TCP3. Including parts.
図7に示すように、各撮像カメラ43,44の撮像信号は画像処理装置45に出力され、ここで上記撮像信号がアナログ信号からデジタル信号に変換されて制御装置46に設けられた演算処理部47で処理される。
As shown in FIG. 7, the imaging signals of the
上記演算処理部47は、各一対の第1、第2の位置合わせマークM1、m1及びM2、m2のX、Y座標を算出し、算出された座標からパネル1とTCP3とのX、Y及びθ方向における位置ずれ量を算出する。
The
そして、演算処理部47の算出結果が駆動出力部48に出力されると、この駆動出力部48は上記パネルテーブル2をX、Y及びθ方向に駆動して、θテーブル10上のパネル1を、上記実装ポジションDに位置決めされたTCP3に対して位置決めする。つまり、パネル1に設けられた一対の第1の位置合わせマークM1、M2に対してTCP3に設けられた一対の第2の位置合わせマークm1,m2がそれぞれ一致するよう位置決めする。
When the calculation result of the
上記演算処理部47は、パネル1とTCP3との位置ずれ量を算出すると同時に、粘着テープ19がTCP3にずれることなく貼着されているか否かを検出する。すなわち、粘着テープ19の幅方向の一端部或いは他端部がTCP3の幅方向一端部或いは他端部から突出していれば、その状態が第1の撮像カメラ43或いは第2の撮像カメラ44によって撮像される。
したがって、上記演算処理部47は、第1、第2の撮像カメラ43,44からの撮像信号によって粘着テープ19の一端部或いは他端部との、上記TCP3の幅方向一端或いは他端とからの突出長さを算出する。
The
Therefore, the
上記粘着テープ19は上記TCP3の幅寸法とほぼ同じ長さに分断されている。そのため、上記貼着剥離ポジションCで、所定長さに切断された貼着テープ19がTCP3の一端部の幅方向に対してずれて貼着されると、この粘着テープ19の一端部或いは他端部がTCP3の幅方向一端或いは他端のいずれか一方から突出するから、その突出長さが上記演算処理部47で算出されることになる。
The
図6は、TCP3の幅方向に対して粘着テープ19がずれて貼着された状態を示していて、粘着テープ19の一端部がTCP3の幅方向一端部からdで示す寸法で突出している。
FIG. 6 shows a state where the
図7に示すように、上記演算処理部47における上記粘着テープ19の上記TCP3に対するずれ量の算出結果は比較部49に出力される。比較部49では上記演算処理部47で算出されたずれ量dが設定値Tと比較され、そのずれ量が設定値Tを上回ると、そのことが上記駆動出力部48に出力される。それによって、駆動出力部48はθ駆動源12によってインデックステーブル4を90度回転させたときの、このインデックステーブル4の停止位置を制御する。なお、設定値Tは1mm以下であって、たとえば0,5mm或いはそれ以下となっている。
As shown in FIG. 7, the calculation result of the shift amount of the
つまり、TCP3に貼着された粘着テープ19が上記TCP3の幅方向の一端と他端とのどちらの方向から突出しているかによって上記インデックステーブル4の回転停止位置を、回転方向の上流側或いは下流側になるよう制御される。
In other words, the rotation stop position of the index table 4 depending
たとえば、上記粘着テープ19の一端が図2に矢印Rで示す上記インデックステーブル4の回転方向上流側に位置する上記TCP3の幅方向一端から突出する方向にずれている場合、上記インデックステーブル4の回転停止位置が上記ずれ量に応じてそれまでより上流側になるよう制御され、逆の場合には下流側になるよう制御される。それによって、TCP3に貼着される粘着テープ19のずれ量は、このTCP3の幅方向に対して上記設定値T以下に制御される。
For example, when one end of the
このように構成された実装装置によれば、パネル1にTCP3を実装するため、実装ポジションDで第1の撮像カメラ43と第2の撮像カメラ44とによって、パネル1とTCP3に設けられた各一対の第1、第2の位置合わせマークM1、m1及びM2、m2がそれぞれ撮像される。
According to the mounting apparatus configured as described above, in order to mount the
そして、一対の撮像カメラ43,44からの撮像信号が画像処理装置45によって画像処理されて演算処理部47に入力されると、この演算処理部47ではパネル1とTCP3とのX、Y及びθ方向のずれ量が算出され、その算出に基づいてパネルテーブル2がX、Y及びθ方向に駆動されてパネル1がTCP3に対して位置決めされた後、実装シリンダ17が作動して吸着ヘッド18が下降方向に駆動される。それによって、吸着ヘッド18に吸着保持されたTCP3がパネル1に実装される。
When the imaging signals from the pair of
上記演算処理部47では、第1、第2の撮像カメラ43,44からの撮像信号によってパネル1とTCP3とのX、Y及びθ方向のずれ量が算出されると同時に、TCP3に貼着された粘着テープ19のずれ量dが算出され、TCP3に対する粘着テープ19のずれ量dが比較部49に設定された設定値Tと比較される。
In the
上記粘着テープ19のずれ量dが設定値Tと同等以上になると、上記比較部49から駆動出力部48に制御信号が出力され、その制御信号によって駆動出力部48からインデックステーブル4に駆動信号が出力される。それによって、インデックステーブル4の回転停止位置が制御される。
When the shift amount d of the
つまり、TPC3に対して粘着テープ19がインデックステーブル4の回転方向上流側或いは下流側のいずれの方向にずれているかによって、上記インデックステーブル4の回転停止位置がそれまでよりも回転方向の上流側或いは下流側になるよう制御される。それによって、粘着テープ19がTCP3の幅方向に対して上記比較部49に設定された設定値T以上にずれて貼着されるのが防止される。
In other words, depending on whether the
このようにしてTCP3に貼着される粘着テープ19のずれ量dが設定値T以上にならないように制御されれば、TCP3に対する粘着テープ19のずれが、粘着テープ19から離型テープ20の剥離を開始する開始端側に生じても、TCP3の一端から突出した粘着テープ19の突出端部と離型テープ20との粘着力を所定以下にすることができる。
Thus, if the deviation d of the
したがって、TCP3に貼着された粘着テープ19から離型テープ20を離型ローラ41によって剥離する際、離型テープ20によって粘着テープ19の端部がTCP3から剥がされて捲くれが生じるのを防止することができる。その結果、TCP3をパネル1に確実に実装することが可能となる。
Therefore, when the
上記第1の撮像カメラ43と第2の撮像カメラ44とによって、パネル1とTCP3とに設けられた第1のマークM1、M2と第2のマークm1,m2を撮像したなら、その撮像信号によってパネル1とTCP3との位置ずれ量を算出すると同時に、TCP3に貼着された粘着テープ19の位置ずれ量を算出するようにしている。
If the
そのため、TCP3に対する粘着テープ19の位置ずれを検出するために、インデックステーブル4に上記粘着テープ19の位置ずれを検出するためのポジションを設けて、その検出を別工程で行う必要がないから、粘着テープ19の位置ずれの検出を行うために、TCP3の実装に要するタクトタイムを長くするということがない。
Therefore, in order to detect the displacement of the
上記一実施の形態では貼着剥離ポジションにおいて、インデックステーブルの回転停止位置を制御して所定長さに切断された粘着テープに対してTCPを位置決めするようにしたが、所定長さに切断された粘着テープが貼着された離型テープの送り量を制御してTCPに対して粘着テープを位置決めするようにしてもよく、要は実装ポジションにおいて検出されたTCPに貼着された粘着テープのずれ量の検出に基づいて、TCPと粘着テープとが相対的に位置決めされるよう制御すればよい。
In sticking the peeling position in the above embodiment has been adapted to position the TCP relative to adhesive tape by controlling the rotational stop position of the index table has been cut to length, it is cut to a predetermined length The adhesive tape may be positioned relative to the TCP by controlling the feed amount of the release tape to which the adhesive tape has been attached. In essence, the displacement of the adhesive tape attached to the TCP detected at the mounting position. Based on the detection of the amount, the TCP and the adhesive tape may be controlled to be relatively positioned.
また、インデックステーブルの実装ポジションで位置決めされたTCPに対してパネルをパネルテーブルによって位置決めして実装するようにしたが、インデックステーブルとパネルを位置決めするパネルテーブルとの間に受け渡し手段を設け、上記実装ポジションに搬送されたTCPを受け渡し手段に受け渡し、この受け渡し手段によってTCPを所定の位置まで搬送して位置決めした後、上記パネルに実装するようにしてもよい。 Also, the panel is positioned and mounted on the TCP positioned at the index table mounting position by the panel table. However, a delivery means is provided between the index table and the panel table for positioning the panel. The TCP transported to the position may be delivered to the delivery means, and the TCP may be delivered to the predetermined position and positioned by the delivery means and then mounted on the panel.
つまり、実装ポジションに搬送位置決めされたTCPを直ちにパネルに実装してもよいが、実装ポジションに搬送されたTCPを受け渡し手段に受け渡し、この受け渡し手段によって搬送位置決めしてからパネルに実装するようにしてもよい。 In other words, the TCP transported and positioned at the mounting position may be immediately mounted on the panel, but the TCP transported to the mounting position is transferred to the delivery means, and transported and positioned by this delivery means and then mounted on the panel. Also good.
1…パネル(基板)、2…パネルテーブル(第1の搬送手段)、3…TCP(電子部品)、4…インデックステーブル(第2の搬送手段)、18…吸着ヘッド、19…粘着テープ、20…離型テープ、21…部品供給部、43…第1の撮像カメラ(第1の撮像手段)、44…第2のカメラ(第2の撮像手段)、45…画像処理部、46…制御装置、47…演算処理部、49…比較部。
DESCRIPTION OF
Claims (7)
上記基板を搬送位置決めする第1の搬送手段と、
上記電子部品を受ける受け取りポジション、この受け取りポジションで受けた電子部品に一方の面に離型テープが貼着されて所定長さに切断された粘着テープの他方の面を貼着して上記一方の面から上記離型テープを剥離する貼着剥離ポジション及び離型テープが剥離された粘着テープの一方の面によって上記電子部品を上記基板に実装する実装ポジションのそれぞれに上記電子部品を順次搬送位置決めする第2の搬送手段と、
上記実装ポジションに搬送された上記基板と、上記粘着テープが貼着された電子部品とを撮像する撮像手段と、
この撮像手段の撮像信号に基づいて上記基板の上記電子部品に対するずれ量と、所定長さに切断されて上記電子部品に貼着された上記粘着テープの上記電子部品に対するずれ量とを算出する演算処理手段と、
上記電子部品に対する基板のずれ量に基づいて上記実装ポジションにおける上記電子部品と基板との相対的な位置決めと、上記電子部品に対する粘着テープのずれ量に基づいて上記貼着剥離ポジションにおける上記電子部品と所定長さに切断された粘着テープとの相対的な位置決めとを制御する制御手段と
を具備したことを特徴とする電子部品の実装装置。 An electronic component mounting apparatus for mounting an electronic component on a substrate with an adhesive tape,
First conveying means for conveying and positioning the substrate;
The receiving position for receiving the electronic component, and the electronic component received at the receiving position is attached to the other side of the adhesive tape having a release tape attached to one surface and cut to a predetermined length. The electronic component is sequentially conveyed and positioned at each of a mounting position where the electronic component is mounted on the substrate by one surface of the adhesive tape from which the release tape is peeled off and the adhesive tape from which the release tape is peeled off. A second conveying means;
Imaging means for imaging the substrate transported to the mounting position and the electronic component to which the adhesive tape is attached;
An arithmetic operation for calculating a displacement amount of the substrate with respect to the electronic component and a displacement amount of the adhesive tape cut to a predetermined length and attached to the electronic component based on an imaging signal of the imaging means. Processing means;
Relative positioning of the electronic component and the substrate at the mounting position based on the amount of deviation of the substrate relative to the electronic component, and the electronic component at the sticking / peeling position based on the amount of deviation of the adhesive tape relative to the electronic component An electronic component mounting apparatus comprising: control means for controlling relative positioning with an adhesive tape cut to a predetermined length.
上記撮像手段は、
上記一対の第1の位置合わせマークの一方と上記一対の第2の位置合わせマークの一方及び上記電子部品の幅方向一端部を同一視野内に収めて撮像する第1の撮像カメラと、
上記一対の第1の位置合わせマークの他方と上記一対の第2の位置合わせマークの他方及び上記電子部品の幅方向他端部を同一視野内に収めて撮像する第2の撮像カメラからなること
を特徴とする請求項1記載の電子部品の実装装置。 A pair of first alignment marks are provided at predetermined intervals on a portion of the substrate where the electronic component is mounted, and a pair of second alignment marks is provided at both ends in the width direction of one end of the electronic component. Provided,
The imaging means is
A first imaging camera that images one of the pair of first alignment marks, one of the pair of second alignment marks, and one end in the width direction of the electronic component within the same field of view;
It comprises a second imaging camera that images the other one of the pair of first alignment marks, the other of the pair of second alignment marks, and the other end in the width direction of the electronic component within the same field of view. The electronic component mounting apparatus according to claim 1.
所定長さに切断された上記粘着テープが貼着された面を上に向けて上記離型テープを所定方向に搬送する送り手段を有し、
上記制御手段によって上記送り手段による上記粘着剥離ポジションにおける上記粘着テープの位置を制御することで、上記電子部品と所定長さに切断された粘着テープとの相対的な位置決めをすることを特徴とする請求項1記載の電子部品の実装装置。 In the above sticking / peeling position,
A feeding means for conveying the release tape in a predetermined direction with the surface to which the adhesive tape cut to a predetermined length is attached facing up;
By controlling the position of the adhesive tape at the adhesive peeling position by the feeding means by the control means, the electronic component and the adhesive tape cut to a predetermined length are positioned relative to each other. The electronic component mounting apparatus according to claim 1.
上記基板を搬送位置決めする工程と、
上記電子部品を受ける受け取りポジション、この受け取りポジションで受けた電子部品に一方の面に離型テープが貼着されて所定長さに切断された粘着テープの他方の面を貼着してから、上記一方の面から上記離型テープを剥離する貼着剥離ポジション及び上記離型テープが剥離された粘着テープの一方の面によって上記電子部品を上記基板に実装する実装ポジションのそれぞれに上記電子部品を順次搬送位置決めする工程と、
上記実装ポジションに搬送された上記基板と上記粘着テープが貼着された電子部品を撮像する工程と、
この撮像した撮像信号に基づいて上記基板の上記電子部品に対するずれ量と、所定長さに切断されて上記電子部品に貼着された上記粘着テープの上記電子部品に対するずれ量とを算出する工程と、
上記電子部品に対する基板のずれ量に基づいて上記実装ポジションにおける上記電子部品と上記基板との相対的な位置決めと、上記電子部品に対する粘着テープのずれ量に基づいて上記貼着剥離ポジションにおける上記電子部品と所定長さに切断された粘着テープとの相対的な位置決めとを制御する工程と
を具備したことを特徴とする電子部品の実装方法。 An electronic component mounting method for mounting an electronic component on a substrate with an adhesive tape,
A step of conveying and positioning the substrate;
The receiving position for receiving the electronic component, the electronic tape received at the receiving position, the release tape is attached to one surface and the other surface of the adhesive tape cut to a predetermined length is attached, The electronic component is sequentially placed on each of the adhesive peeling position for peeling the release tape from one surface and the mounting position for mounting the electronic component on the substrate by one surface of the adhesive tape from which the release tape is peeled off. A process of carrying and positioning;
Imaging the electronic component having the substrate and the adhesive tape adhered to the mounting position, and
Calculating a displacement amount of the substrate with respect to the electronic component and a displacement amount of the adhesive tape cut to a predetermined length and attached to the electronic component based on the captured image signal; ,
And relative positioning between the electronic component and the substrate in the mounted position on the basis of the shift amount of the substrate relative to the electronic component, the electronic component in the attaching peeling position on the basis of the shift amount of the adhesive tape for the electronic component a mounting method of the electronic component, characterized by comprising the step of controlling the relative positioning of the adhesive tape is cut to length.
上記撮像する工程は、
上記一対の第1の位置合わせマークの一方と上記一対の第2の位置合わせマークの一方及び上記電子部品の幅方向一端部を同一視野内に収めて撮像する工程と、
上記一対の第1の位置合わせマークの他方と上記一対の第2の位置合わせマークの他方及び上記電子部品の幅方向他端部を同一視野内に収めて撮像する工程と、
を具備したことを特徴とする請求項6記載の電子部品の実装方法。 A pair of first alignment marks are provided at predetermined intervals on a portion of the substrate where the electronic component is mounted, and a pair of second alignment marks is provided at both ends in the width direction of one end of the electronic component. Provided,
The imaging step is
Capturing one of the pair of first alignment marks, one of the pair of second alignment marks, and one end in the width direction of the electronic component within the same field of view;
Capturing the other one of the pair of first alignment marks, the other of the pair of second alignment marks, and the other end in the width direction of the electronic component within the same field of view;
The electronic component mounting method according to claim 6 , further comprising :
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007322469A JP5435861B2 (en) | 2007-12-13 | 2007-12-13 | Electronic component mounting apparatus and mounting method |
| KR1020107015375A KR101148322B1 (en) | 2007-12-13 | 2008-11-14 | Apparatus and method for mounting electronic component |
| PCT/JP2008/070816 WO2009075164A1 (en) | 2007-12-13 | 2008-11-14 | Apparatus and method for mounting electronic component |
| CN2008801185239A CN101884098B (en) | 2007-12-13 | 2008-11-14 | Apparatus and method for mounting electronic component |
| TW097144848A TWI460795B (en) | 2007-12-13 | 2008-11-20 | Installation device and installation method of electronic parts |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007322469A JP5435861B2 (en) | 2007-12-13 | 2007-12-13 | Electronic component mounting apparatus and mounting method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009147089A JP2009147089A (en) | 2009-07-02 |
| JP2009147089A5 JP2009147089A5 (en) | 2012-11-22 |
| JP5435861B2 true JP5435861B2 (en) | 2014-03-05 |
Family
ID=40755407
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007322469A Active JP5435861B2 (en) | 2007-12-13 | 2007-12-13 | Electronic component mounting apparatus and mounting method |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JP5435861B2 (en) |
| KR (1) | KR101148322B1 (en) |
| CN (1) | CN101884098B (en) |
| TW (1) | TWI460795B (en) |
| WO (1) | WO2009075164A1 (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5572575B2 (en) * | 2010-05-12 | 2014-08-13 | 東京エレクトロン株式会社 | Substrate positioning apparatus, substrate processing apparatus, substrate positioning method, and storage medium storing program |
| CN102879395A (en) * | 2011-07-11 | 2013-01-16 | 昆山华扬电子有限公司 | PCB auxiliary contraposition inspection device |
| US10952360B2 (en) * | 2015-09-30 | 2021-03-16 | Yamaha Hatsudoki Kabushiki Kaisha | Component mounter and component holder imaging method |
| JP6767333B2 (en) * | 2017-09-28 | 2020-10-14 | 芝浦メカトロニクス株式会社 | Electronic component mounting device |
| KR20210121351A (en) | 2020-03-27 | 2021-10-08 | 삼성디스플레이 주식회사 | Bonding apparatus and manufacturing method of display device using the same |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3939159B2 (en) * | 2002-02-05 | 2007-07-04 | 芝浦メカトロニクス株式会社 | Tape member sticking state inspection device and tape member sticking device using the same |
| JP2004021051A (en) * | 2002-06-19 | 2004-01-22 | Takatori Corp | Method and apparatus for press-bonding flexible board to liquid crystal panel |
| JP4538843B2 (en) * | 2004-03-05 | 2010-09-08 | 澁谷工業株式会社 | How to apply adhesive tape for die bonding |
| JP2006058411A (en) * | 2004-08-18 | 2006-03-02 | Takatori Corp | Method and apparatus for bonding polarizing plate to liquid crystal panel |
| KR100591074B1 (en) * | 2004-12-13 | 2006-06-19 | (주) 선양디엔티 | System for attaching anisotropic conductive material on flexible printed circuit board for chip on film |
| JP4591140B2 (en) * | 2005-03-16 | 2010-12-01 | パナソニック株式会社 | Display panel assembling apparatus and assembling method |
| JP4708896B2 (en) * | 2005-07-20 | 2011-06-22 | 芝浦メカトロニクス株式会社 | Adhesive tape sticking device and sticking method |
-
2007
- 2007-12-13 JP JP2007322469A patent/JP5435861B2/en active Active
-
2008
- 2008-11-14 WO PCT/JP2008/070816 patent/WO2009075164A1/en active Application Filing
- 2008-11-14 CN CN2008801185239A patent/CN101884098B/en active Active
- 2008-11-14 KR KR1020107015375A patent/KR101148322B1/en active IP Right Grant
- 2008-11-20 TW TW097144848A patent/TWI460795B/en active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2009075164A1 (en) | 2009-06-18 |
| KR20100093592A (en) | 2010-08-25 |
| CN101884098B (en) | 2012-08-29 |
| CN101884098A (en) | 2010-11-10 |
| JP2009147089A (en) | 2009-07-02 |
| TWI460795B (en) | 2014-11-11 |
| TW200931542A (en) | 2009-07-16 |
| KR101148322B1 (en) | 2012-05-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6767333B2 (en) | Electronic component mounting device | |
| JP5435861B2 (en) | Electronic component mounting apparatus and mounting method | |
| CN108430167B (en) | Electronic component mounting device and method for manufacturing display member | |
| KR101209502B1 (en) | Assembling apparatus of flat panel display module | |
| CN106660710B (en) | Component supply device | |
| JP6663940B2 (en) | Electronic component mounting apparatus and display member manufacturing method | |
| CN102194721A (en) | Assembling device of FPD module | |
| JP5160819B2 (en) | Electronic component mounting apparatus and mounting method | |
| JP2008139523A (en) | Optical film-pasting method, optical film-pasting device, and manufacturing method of display panel | |
| JP2009004652A (en) | Packaging device and packaging method for electronic component | |
| JP4708896B2 (en) | Adhesive tape sticking device and sticking method | |
| JP5416825B2 (en) | Electronic component mounting apparatus and mounting method | |
| JP2003175922A (en) | Automatic label affixing device | |
| JP2008285285A (en) | Tape sticking device | |
| JP4958817B2 (en) | Electronic component mounting equipment | |
| JP2009026831A (en) | Mounting device for electronic component | |
| JP2005022676A (en) | Method and apparatus for sticking label | |
| JP2013214725A (en) | Adhesive tape sticking device, sticking method and electronic component mounting device | |
| JP2020120127A (en) | Mounting device for electronic component and manufacturing method of member for display | |
| JP5477317B2 (en) | Component mounting apparatus and component mounting method | |
| JP2007108255A (en) | Device for sticking polarizing plate | |
| JP7340732B2 (en) | Component supply device, component mounting device, component supply method, and component mounting method | |
| JP2005072078A (en) | Equipment and method for sticking tape member | |
| JP7285303B2 (en) | Mounting equipment for electronic components and method for manufacturing display members | |
| WO2023067700A1 (en) | Substrate clamping method, work apparatus, and work system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100708 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100708 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120426 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120529 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130301 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5435861 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |