JP5420405B2 - ロボット骨組、外骨格構造体、装着式のロボットシステム、人体と協調して装着式のロボット骨組を同時に動かす方法、装着式の人間の外骨格を人体の動きと協調して動かせるようにする方法 - Google Patents
ロボット骨組、外骨格構造体、装着式のロボットシステム、人体と協調して装着式のロボット骨組を同時に動かす方法、装着式の人間の外骨格を人体の動きと協調して動かせるようにする方法 Download PDFInfo
- Publication number
- JP5420405B2 JP5420405B2 JP2009520827A JP2009520827A JP5420405B2 JP 5420405 B2 JP5420405 B2 JP 5420405B2 JP 2009520827 A JP2009520827 A JP 2009520827A JP 2009520827 A JP2009520827 A JP 2009520827A JP 5420405 B2 JP5420405 B2 JP 5420405B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- human body
- exoskeleton
- robot
- skeleton
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 40
- 238000000034 method Methods 0.000 title claims description 27
- 238000006073 displacement reaction Methods 0.000 claims description 27
- 230000005484 gravity Effects 0.000 claims description 26
- 230000004044 response Effects 0.000 claims description 16
- 210000002414 leg Anatomy 0.000 claims description 14
- 238000002485 combustion reaction Methods 0.000 claims description 12
- 210000003414 extremity Anatomy 0.000 claims description 12
- 239000012530 fluid Substances 0.000 claims description 12
- 230000003278 mimic effect Effects 0.000 claims description 8
- 238000004364 calculation method Methods 0.000 claims description 7
- 230000007246 mechanism Effects 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 5
- 210000001624 hip Anatomy 0.000 claims description 5
- 230000003213 activating effect Effects 0.000 claims description 4
- 238000004891 communication Methods 0.000 claims description 4
- 230000035945 sensitivity Effects 0.000 claims description 2
- 238000001514 detection method Methods 0.000 claims 1
- 210000004394 hip joint Anatomy 0.000 claims 1
- 230000002123 temporal effect Effects 0.000 claims 1
- 239000013598 vector Substances 0.000 description 13
- 230000001276 controlling effect Effects 0.000 description 7
- 230000003993 interaction Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 239000011159 matrix material Substances 0.000 description 6
- 210000000707 wrist Anatomy 0.000 description 5
- 210000004197 pelvis Anatomy 0.000 description 4
- 238000005259 measurement Methods 0.000 description 3
- 230000037230 mobility Effects 0.000 description 3
- 210000003205 muscle Anatomy 0.000 description 3
- 238000011160 research Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 210000004556 brain Anatomy 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000000245 forearm Anatomy 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000001537 neural effect Effects 0.000 description 2
- YBJHBAHKTGYVGT-ZKWXMUAHSA-N (+)-Biotin Chemical compound N1C(=O)N[C@@H]2[C@H](CCCCC(=O)O)SC[C@@H]21 YBJHBAHKTGYVGT-ZKWXMUAHSA-N 0.000 description 1
- 206010073306 Exposure to radiation Diseases 0.000 description 1
- 235000002595 Solanum tuberosum Nutrition 0.000 description 1
- 244000061456 Solanum tuberosum Species 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000005021 gait Effects 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 231100001261 hazardous Toxicity 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 230000002232 neuromuscular Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000009183 running Effects 0.000 description 1
- 230000007103 stamina Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000035900 sweating Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- FEPMHVLSLDOMQC-UHFFFAOYSA-N virginiamycin-S1 Natural products CC1OC(=O)C(C=2C=CC=CC=2)NC(=O)C2CC(=O)CCN2C(=O)C(CC=2C=CC=CC=2)N(C)C(=O)C2CCCN2C(=O)C(CC)NC(=O)C1NC(=O)C1=NC=CC=C1O FEPMHVLSLDOMQC-UHFFFAOYSA-N 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/024—Knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0244—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0255—Both knee and hip of a patient, e.g. in supine or sitting position, the feet being moved together in a plane substantially parallel to the body-symmetrical plane
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/008—Appliances for aiding patients or disabled persons to walk about using suspension devices for supporting the body in an upright walking or standing position, e.g. harnesses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J1/00—Manipulators positioned in space by hand
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
- A61H2201/0176—By stopping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1238—Driving means with hydraulic or pneumatic drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1614—Shoulder, e.g. for neck stretching
- A61H2201/1616—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/163—Pelvis holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
- A61H2201/1642—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1676—Pivoting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5069—Angle sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5079—Velocity sensors
Landscapes
- Health & Medical Sciences (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Physical Education & Sports Medicine (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
- Rehabilitation Tools (AREA)
Description
本願は、その全体がすべての目的について本明細書に援用される、2006年7月17日出願の米国仮特許出願第60/831,476号、および2007年7月16日出願の通し番号不明の米国非仮特許出願に対する優先権を主張する。
1.ロボット関節角度のベクトルθ200、
2.ロボット関節速度のベクトルθ210、
3.測定された関節トルクのベクトルτ220、
4.重力のベクトルg230(典型的に、外骨格に取り付けられたある基準の骨組において、たとえば骨盤に取り付けられた慣性測定ユニットを使用して測定される)、
5.操作者と外骨格との間の相互作用から生じる、Fベクトル240として示される力およびモーメントを含むことができる。相互作用の力およびモーメントのベクトルFは、たとえば、以下のような位置で測定される。
(ii)外骨格の骨盤と操作者に取り付けられた骨盤のハーネスとの間、
(iii)外骨格の脊柱構造体と操作者に取り付けられた肩のハーネスとの間、
(iv)操作者の手および/または手首と外骨格の腕との間、および
(v)他の位置も可能である。
左の脚部には、

Kj(si)=KLOW+(KHIGH−KLOW)f(si)
(5)
式中、j=FまたはSであり、力/モーメント(F)利得、「向きK」(S)、およびi=RまたはL(右または左の脚)を示し、式中、KHIGH、KLOWは利得の上下の限界値である。s(すなわち以前に定義された基準化係数SLまたはSR)が0から1へと変化するにつれて、関数f(s)は1から0へと単調に変化する。このような滑り利得アルゴリズムの一例が図7に示され、下記に方程式6として示される。
SlideGain=KHIGH+SL*(KLOW−KHIGH)/(thresh+ε)
(6)
左脚の滑り利得は方程式6で上記に示される。しかしながら、同様の式(SLをSRによって置き換え)が、右脚に使用されてもよい。threshはこれを超えると利得が一定となる値であり、εは約10−3から10−6の小さい数であり得る。
装着式の人間外骨格が人体の動きと協調して動くのを可能にする方法が、本明細書に考慮および開示される。本方法は、人間の外骨格を装着するステップと、外骨格に連結された複数の力センサと人体の四肢の近くの接触位置との間における力の状態を感知するステップとを含む。さらに、本方法は、外骨格の一部分に対する重力の方向を計算するステップと、外骨格の人間/力の応答値を手動で調整するステップとを含む。さらに、本方法は、力センサに対して人体の一部分を変位させるステップと、力の状態における変化を感知するステップとを含む。本方法はまた、外骨格の動かない荷重支持部分をロックするステップと、外骨格の動く非荷重支持部分をアンロックするステップと、重力を含む力の状態を回復するのに必要とされる、外骨格のアンロックされた非荷重支持部分の関節の回転力を計算するステップと、人体に掛かる外骨格の力が確実にゼロになるのに必要とされる、外骨格のロックされた荷重支持部分の関節の回転力を計算するステップと、少なくとも計算された関節の回転力からなる信号を発生するステップと、を含む。さらに、本方法は、前記外骨格に連結された作動装置システムに前記信号を送信するステップと、外骨格のアンロックされた非荷重支持部分を計算された関節の回転力で変位させるように、前記信号に応答して、外骨格に連結された変位装置を作動させるステップと、を含む。さらに、本方法は、外骨格のロックされた荷重支持部分において、計算された関節の回転力を維持するように、前記信号に応答して、外骨格に連結された変位装置を作動させるステップと、人体の動きを模倣するように上記のステップを繰り返すステップと、を含む。
Claims (24)
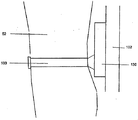
- 少なくとも人体の一部分に近似し、少なくとも人体の一部分に連結可能である形状にされ、前記人体による動きを模倣するように構成されたロボット骨組(100)であって、前記ロボット骨組はロボット変位装置を備え、前記ロボット変位装置は、
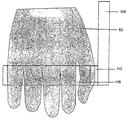
力センサと前記人体の四肢との間の調整可能な制御する界接面の力の状態の関係を感知し、前記人体の四股の適切な形状に沿って前記ロボット骨組に取り付けられた複数の力センサ(110、120、130、140)であって、力センサの少なくとも1つが足と強力に接触している関係で接触可能なセンサであり、また力の信号を出力する、複数の力センサ(110、120、130、140)と、
前記センサから前記力の信号を受信し、前記ロボット骨組の関節位置を検出し、前記ロボット骨組(100)の位置に対する重力の力および前記ロボット骨組(100)の位置に対する重力の方向を計算し、前記人体に掛かるロボット骨組(100)の力およびロボット骨組(100)により人体に掛かる計算された力に対抗するのに必要な関節の回転力を計算し、ロボット骨組(100)と人体の四肢との間の制御する界接面の力の状態の関係を維持し、作動信号を発生して送信するように構成される、前記ロボット骨組に取り付けられた中央制御ユニット(160)と、
前記中央制御ユニット(160)からの前記送信された作動信号を継続的に受信し、前記制御する力の状態の関係を維持するために、前記ロボット骨組(100)により前記人体に掛かる力に対抗するように前記ロボット骨組(100)の関節構成要素に掛かる計算された関節の回転力を作用させるように構成される、前記ロボット骨組(100)に取り付けられた駆動システム(150)とを備え、
前記中央制御ユニット(160)は、力および可動性を最適化するために、動作中に前記ロボット変位装置の荷重支持部分と非荷重支持部分との間の滑り利得方式を、以下の式1
K j (s i )=K LOW +(K HIGH −K LOW )f(s i ) (式1)
式1中、j=FまたはSであり、力/モーメント(F)利得、「向きK」(S)、およびi=RまたはL(右または左の脚)を示し、式中、K HIGH 、K LOW は利得の上下の限界値である、
を使用することにより、実施するように構成される、ロボット骨組(100)。 - 前記複数のセンサの少なくとも1つが、前記人体の四肢上の接触位置に隣接して非接触の関係で配置される、請求項1に記載のロボット骨組。
- 前記複数の力センサの少なくとも1つが、前記人体の足の底部分と強力に接触している関係で配設されている、請求項1に記載のロボット骨組。
- 前記複数のセンサが、前記ロボット骨組上の股関節部および肩の位置の近傍に配置された力センサをさらに含み、前記複数の力センサが、複数軸における前記人体の動きの複数の方向を同時に感知可能である、請求項1に記載のロボット骨組。
- 前記駆動システムが、複数方向および複数軸において前記ロボット骨組を変位させるように同時作動が可能である、前記ロボット骨組上の複数の位置に配置された複数の駆動機構をさらに含む、請求項1に記載のロボット骨組。
- 前記力センサが、人間以外の接触によって起動可能である、請求項1に記載のロボット骨組。
- 前記駆動システム(150)が、
ピストン、チャンバに流体を供給するように前記チャンバに連結された少なくとも1つの流体口、および通気口を有するチャンバであって、前記ピストンおよび前記少なくとも1つの流体口が、前記チャンバに可変圧力を与えるように構成され、前記ピストンおよび前記流体が、前記チャンバの燃焼部における燃焼からエネルギーを与えるために少なくとも部分的に前記燃焼を容易にするように構成されたチャンバと、
前記チャンバ内の前記燃焼を制御する制御器と、
前記チャンバと流体連通した高速応答構成要素であって、前記チャンバの前記燃焼部に隣接して配置され、前記チャンバ内における前記燃焼から前記エネルギーの一部を引き出すように構成された高速応答構成要素と、を備える内部燃焼(IC)機関によって動力を供給される、請求項1に記載のロボット骨組。 - 動力源からの動力をすべての前記力センサよりも少ない群へと導くように構成される制御システムをさらに備えた、請求項1に記載のロボット骨組。
- 前記中央制御ユニット(160)は、通信装置からのリモート信号を受信するように構成される、請求項1に記載のロボット骨組。
- 人体への取付け用の可動式の外骨格構造体であって、
前記人体に対して応答して動くように構成された外骨格構造体と、
複数のセンサと前記人体との間の調整可能な制御する界接面の力の状態を検出するように前記外骨格構造体に取り付けられた感知手段であって、前記センサの少なくとも1つが人体の四股に強力に接触している関係にある、感知手段と、
前記外骨格構造体の関節位置を検出し、前記外骨格構造体の位置での重力の方向および力を計算し、前記外骨格構造体と前記人体との間の制御する界接面の力の状態の関係を維持するために、前記人体に掛かる前記外骨格構造体の力を計算し且つ前記外骨格構造体によって前記人体に作用する前記計算された力に対抗するのに必要な関節の回転力を計算するように前記外骨格構造体に取り付けられた計算手段と、
重力の方向および力に対する前記制御する界接面の力の状態を持続することに基づいて、前記外骨格構造体により前記人体に掛かる力に対抗するために、前記外骨格構造体の関節構成要素に掛かる前記計算された関節の回転力を掛けることにより、前記人体の空間的および時間的な動きを模倣するように構成された、前記外骨格構造体に取り付けられた変位システムと、を備え、
前記計算手段は、力および可動性を最適化するために、動作中に前記可動式の外骨格構造体の荷重支持部分と非荷重支持部分との間の滑り利得方式を、以下の式2
K j (s i )=K LOW +(K HIGH −K LOW )f(s i ) (式2)
式2中、j=FまたはSであり、力/モーメント(F)利得、「向きK」(S)、およびi=RまたはL(右または左の脚)を示し、式中、K HIGH 、K LOW は利得の上下の限界値である、
を使用することにより、実施するように構成される、外骨格構造体。 - 人体の動きを模倣するために実時間で変位させられるように構成された装着式のロボットシステムであって、
少なくとも前記人体の一部分に近似し、少なくとも人体の一部分に連結可能である形状にされたロボット骨組(100)と、
前記人体の四肢と力センサとの間の調整可能な制御する界接面の力の状態の関係の変化を感知するように構成される、前記ロボット骨組に取り付けられた複数の線形および回転の力センサであって、力センサの少なくとも1つが人体と強力に接触している関係である、力センサと、
前記ロボット骨組(100)の関節位置を検出し、前記ロボット骨組(100)の関節位置に対する重力の方向および力を計算し、前記人体に掛かる前記ロボット骨組(100)の力を計算しおよび前記ロボット骨組(100)により前記人体に掛かる前記計算された力に対抗するのに必要な関節の回転力を計算し、前記ロボット骨組(100)と前記人体の四股との間の前記調整可能な制御する界接面の力の状態の関係を維持し、作動信号を送信するように構成される、前記ロボット骨組(100)に取り付けられた中央制御ユニット(160)と、
前記中央制御ユニット(160)から前記作動信号を受信し、駆動機構を起動するように構成される、前記ロボット骨組(100)に取り付けられた作動装置と、
前記調整可能な制御する界接面の力の状態の関係が回復されるまで、前記人体に対して前記ロボット骨組(100)の一部分を変位し、前記ロボット骨組(100)により前記人体に掛かる力に対抗するように前記ロボット骨組の関節構成要素に前記計算された関節の回転力を掛けるように構成される、前記作動装置に連結された駆動機構と、を備え、
前記中央制御ユニットは、力および可動性を最適化するために、動作中に前記装着式のロボットシステムの荷重支持部分と非荷重支持部分との間の滑り利得方式を、以下の式3
K j (s i )=K LOW +(K HIGH −K LOW )f(s i ) (式3)
式3中、j=FまたはSであり、力/モーメント(F)利得、「向きK」(S)、およびi=RまたはL(右または左の脚)を示し、式中、K HIGH 、K LOW は利得の上下の限界値である、
を使用することにより、実施するように構成される、装着式のロボットシステム。 - 人体(52)と協調して装着式のロボット骨組(100)を同時に動かす方法であって、
少なくとも前記人体の四肢の近くに配置された前記ロボット骨組上の複数の力センサと前記人体の四肢の近くの接触位置との間の制御する界接面の力の関係を検出するステップであり、少なくとも1つの力センサが四股と強力に接触している関係である、前記検出ステップと、
前記ロボット骨組の関節位置を検出するステップと、
前記装着式のロボット骨組(100)の位置に対する重力の方向を検出するステップと、
前記力センサに対して前記人体(52)の一部分を変位させるステップと、
前記界接面の力の関係の状態における変化を検出するステップと、
前記制御する界接面の力の関係の状態における変化に応答して、前記ロボット骨組により前記人体に掛かる力に対抗する関節の回転力の信号を発生するステップと、
前記装着式のロボット骨組(100)に連結された作動装置システムに前記関節の回転力の信号を送信するステップと、
前記制御する界接面の力の関係が回復されるまで、前記ロボット骨組により人体に掛かる力に対抗するように前記関節の回転力の信号に応答して前記ロボット骨組(100)に連結された変位装置を作動させるステップとを含み、
前記方法が更に、力および可動性を最適化するために、前記装着式のロボットシステム骨組の荷重支持部分と非荷重支持部分との間の滑り利得方式を、以下の式4
K j (s i )=K LOW +(K HIGH −K LOW )f(s i ) (式4)
式4中、j=FまたはSであり、力/モーメント(F)利得、「向きK」(S)、およびi=RまたはL(右または左の脚)を示し、式中、K HIGH 、K LOW は利得の上下の限界値である、
を使用することにより、実施するステップを有する、
方法。 - 前記力センサが、前記人体(52)の肩および股関節部の近くに配置される、請求項12に記載の方法。
- 前記力の関係が、調整可能な近接センサと前記人体(52)の接触位置との間の距離によって定義される、請求項12に記載の方法。
- 前記センサが、複数軸における複数方向の動きを感知するように同時作動が可能である、請求項12に記載の方法。
- 前記変位装置が、複数方向および複数軸において前記ロボット骨組(100)を変位させるように同時に作動するように構成された、請求項12に記載の方法。
- 前記変位装置が、高速応答力変換装置によって動力を供給される、請求項12に記載の方法。
- 前記制御する力の状態の関係における変化に対する前記力センサの感度が調整可能である、請求項12に記載の方法。
- 装着式の人間の外骨格を人体の動きと協調して動かせるようにする方法であって、
人間外骨格を装着するステップと、
前記外骨格に連結された複数の力センサと前記人体の四肢の近くの複数の接触位置との間における力の状態を感知するステップであって、力センサの少なくとも1つが四股と強力に接触している関係である、前記感知ステップと、
前記外骨格の関節位置を検出するステップと、
前記外骨格の一部分に対する重力の方向を計算するステップと、
外骨格の人間/力の応答値を手動で調整するステップと、
前記力センサに対して前記人体の一部分を変位させるステップと、
前記力の状態における変化で生じる、前記外骨格により前記人体に掛かる力を感知するステップと、
前記外骨格の動かない荷重支持部分をロックするステップと、
前記外骨格の動く非荷重支持部分をアンロックするステップと、
前記外骨格により前記人体に掛かる力に対抗し、重力を含む前記力の状態を回復するのに必要とされる、前記外骨格のアンロックされた非荷重支持部分の関節の回転力を計算するステップと、
前記人体に掛かる前記外骨格の力を確実にゼロにするのに必要とされる、前記外骨格のロックされた荷重支持部分の関節の回転力を計算するステップと、
少なくとも前記計算された関節の回転力からなる信号を発生するステップと、
前記外骨格に連結された作動装置システムに前記信号を送信するステップと、
前記外骨格の前記アンロックされた非荷重支持部分を前記計算された関節の回転力で変位させるように、前記信号に応答して、前記外骨格に連結された変位装置を作動させるステップと、
前記外骨格の前記ロックされた荷重支持部分において前記計算された関節の回転力を維持するように、前記信号に応答して、前記外骨格に連結された前記変位装置を作動させるステップと、
前記人体の動きをまねるように上記のステップを繰り返すステップと
を含む方法。 - 前記中央制御ユニット(160)が前記ロボット骨組の速度を検出する、請求項1に記載のロボット骨組(100)。
- 前記計算手段が、前記外骨格構造体の速度を検出する、請求項10に記載の人体への取付け用の可動式の外骨格構造体。
- 前記中央制御ユニット(160)が前記ロボット骨組の速度を検出する、請求項11に記載の装着式のロボットシステム。
- 前記ロボット骨組の速度を検出するステップを更に備える、請求項12に記載の装着式のロボット骨組を同時に動かす方法。
- 前記外骨格の速度を検出するステップを更に備える、請求項19に記載の装着式の人間の外骨格を人体の動きと協調して動かせるようにする方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US83147606P | 2006-07-17 | 2006-07-17 | |
| US60/831,476 | 2006-07-17 | ||
| US11/879,448 | 2007-07-16 | ||
| US11/879,448 US8849457B2 (en) | 2006-07-17 | 2007-07-16 | Contact displacement actuator system |
| PCT/US2007/016336 WO2008094191A2 (en) | 2006-07-17 | 2007-07-17 | Contact displacement actuator system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012248425A Division JP2013082065A (ja) | 2006-07-17 | 2012-11-12 | ロボット変位装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009543706A JP2009543706A (ja) | 2009-12-10 |
| JP2009543706A5 JP2009543706A5 (ja) | 2010-11-25 |
| JP5420405B2 true JP5420405B2 (ja) | 2014-02-19 |
Family
ID=39674636
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009520827A Active JP5420405B2 (ja) | 2006-07-17 | 2007-07-17 | ロボット骨組、外骨格構造体、装着式のロボットシステム、人体と協調して装着式のロボット骨組を同時に動かす方法、装着式の人間の外骨格を人体の動きと協調して動かせるようにする方法 |
| JP2012248425A Pending JP2013082065A (ja) | 2006-07-17 | 2012-11-12 | ロボット変位装置 |
| JP2014198301A Pending JP2015027730A (ja) | 2006-07-17 | 2014-09-29 | ロボット変位装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012248425A Pending JP2013082065A (ja) | 2006-07-17 | 2012-11-12 | ロボット変位装置 |
| JP2014198301A Pending JP2015027730A (ja) | 2006-07-17 | 2014-09-29 | ロボット変位装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8849457B2 (ja) |
| EP (2) | EP2043823B1 (ja) |
| JP (3) | JP5420405B2 (ja) |
| KR (1) | KR101514467B1 (ja) |
| CN (1) | CN101489732B (ja) |
| WO (1) | WO2008094191A2 (ja) |
Families Citing this family (103)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8849457B2 (en) * | 2006-07-17 | 2014-09-30 | Raytheon Company | Contact displacement actuator system |
| US20090137933A1 (en) * | 2007-11-28 | 2009-05-28 | Ishoe | Methods and systems for sensing equilibrium |
| AU2008341232B2 (en) | 2007-12-26 | 2015-04-23 | Rex Bionics Limited | Mobility aid |
| US8731716B2 (en) | 2008-08-28 | 2014-05-20 | Raytheon Company | Control logic for biomimetic joint actuators |
| WO2010025419A2 (en) * | 2008-08-28 | 2010-03-04 | Raytheon Sarcos, Llc | Method of sizing actuators for a biomimetic mechanical joint |
| CN102196785B (zh) * | 2008-08-28 | 2014-02-26 | 雷神公司 | 仿生机械关节 |
| ES2335337B1 (es) * | 2009-04-02 | 2011-02-14 | Ikerlan, S.Coop | Dispositivo de deteccion de la intencion de movimiento de un usuario,adaptado a un exoesqueleto. |
| WO2011032363A1 (en) * | 2009-09-19 | 2011-03-24 | Quan Xiao | Method and apparatus of variable g force experience and create immersive vr sensations |
| KR101572852B1 (ko) * | 2010-01-06 | 2015-12-01 | 삼성전자 주식회사 | 팔 보조 장치 |
| CN101786478B (zh) * | 2010-02-23 | 2011-09-07 | 华东理工大学 | 具有反力矩结构的虚拟力控制下肢外骨骼机器人 |
| ES2568802T3 (es) | 2010-04-09 | 2016-05-04 | Ekso Bionics | Sistema de manipulación de carga de exoesqueleto y procedimiento de uso |
| JP6008836B2 (ja) * | 2010-04-09 | 2016-10-19 | ロッキード・マーチン・コーポレイションLockheed Martin Corporation | 携帯型荷吊り上げシステム |
| AU2011237357B2 (en) * | 2010-04-09 | 2016-05-19 | Deka Products Limited Partnership | System and apparatus for robotic device and methods of using thereof |
| US9314921B2 (en) | 2011-03-17 | 2016-04-19 | Sarcos Lc | Robotic lift device with human interface operation |
| US9789603B2 (en) | 2011-04-29 | 2017-10-17 | Sarcos Lc | Teleoperated robotic system |
| US8942846B2 (en) | 2011-04-29 | 2015-01-27 | Raytheon Company | System and method for controlling a teleoperated robotic agile lift system |
| US8977388B2 (en) | 2011-04-29 | 2015-03-10 | Sarcos Lc | Platform perturbation compensation |
| US8892258B2 (en) | 2011-04-29 | 2014-11-18 | Raytheon Company | Variable strength magnetic end effector for lift systems |
| US8831794B2 (en) * | 2011-05-04 | 2014-09-09 | Qualcomm Incorporated | Gesture recognition via an ad-hoc proximity sensor mesh for remotely controlling objects |
| US9719633B2 (en) * | 2011-05-06 | 2017-08-01 | Garrett W. Brown | Exoskeleton arm interface |
| KR101290173B1 (ko) * | 2011-10-26 | 2013-07-30 | 한양대학교 에리카산학협력단 | 근력 지원용 착용형 로봇 |
| US20130145530A1 (en) * | 2011-12-09 | 2013-06-13 | Manu Mitra | Iron man suit |
| US9095981B2 (en) | 2012-01-11 | 2015-08-04 | Garrett W. Brown | Load and torque resistant caliper exoskeleton |
| US9616580B2 (en) | 2012-05-14 | 2017-04-11 | Sarcos Lc | End effector for a robotic arm |
| KR20140002840A (ko) * | 2012-06-26 | 2014-01-09 | 한국과학기술연구원 | 물리적 다접촉 상호작용을 위한 링크 메커니즘 |
| KR101250324B1 (ko) | 2012-10-16 | 2013-04-08 | 엘아이지넥스원 주식회사 | 발바닥 센서부를 구비한 착용 로봇 |
| KR101383722B1 (ko) * | 2012-12-17 | 2014-04-08 | 현대자동차(주) | 로봇의 양팔제어방법 |
| KR101371756B1 (ko) * | 2012-12-17 | 2014-03-12 | 현대자동차(주) | 로봇의 보행제어방법 |
| KR101287346B1 (ko) * | 2013-02-20 | 2013-07-23 | 한양대학교 에리카산학협력단 | 근력 지원용 착용형 로봇 |
| KR101287349B1 (ko) * | 2013-02-20 | 2013-07-23 | 한양대학교 에리카산학협력단 | 근력 지원용 착용형 로봇 |
| CN103407588B (zh) * | 2013-08-23 | 2016-12-28 | 电子科技大学 | 一种太空运动辅助装置 |
| JP6284319B2 (ja) * | 2013-08-30 | 2018-02-28 | 三菱重工業株式会社 | パワーアシストスーツ |
| JP6284318B2 (ja) * | 2013-08-30 | 2018-02-28 | 三菱重工業株式会社 | パワーアシストスーツ |
| KR20150039386A (ko) * | 2013-10-02 | 2015-04-10 | 삼성전자주식회사 | 보행 보조 장치 및 보행 보조 장치의 제어방법 |
| RU2552703C2 (ru) * | 2013-10-29 | 2015-06-10 | Федеральное государственное бюджетное военное образовательное учреждение высшего профессионального образования "Военно-технический университет" Министерства обороны Российской Федерации | Универсальный общевойсковой экзоскелет |
| CN103622792A (zh) * | 2013-11-25 | 2014-03-12 | 北京林业大学 | 外骨骼助力机器人的信息采集与控制系统 |
| KR101620146B1 (ko) | 2013-12-13 | 2016-05-12 | 현대자동차주식회사 | 로봇발의 원터치 착탈장치 |
| KR101490885B1 (ko) * | 2013-12-18 | 2015-02-06 | 국방과학연구소 | 보행의도 추정기반 착용로봇 및 그 제어방법 |
| CN103707284B (zh) * | 2013-12-29 | 2016-01-20 | 哈尔滨理工大学 | 佩戴式上肢助力臂及其助力方法 |
| WO2015106278A2 (en) * | 2014-01-13 | 2015-07-16 | Massachusetts Institute Of Technology | Wearable robot assisting manual tasks |
| FR3016821B1 (fr) * | 2014-01-29 | 2019-08-02 | Robotiques 3 Dimensions | Exosquelette a port frontal et procede d'utilisation d'un tel exosquelette. |
| JP2015157001A (ja) * | 2014-02-25 | 2015-09-03 | シャープ株式会社 | 運動補助装置 |
| CN106102644B (zh) * | 2014-03-17 | 2019-01-11 | 直观外科手术操作公司 | 避免活动范围极限的自动推出 |
| US9149938B1 (en) | 2014-04-11 | 2015-10-06 | Harris Corporation | Robotic exoskeleton with adaptive viscous user coupling |
| JP2017518098A (ja) * | 2014-05-05 | 2017-07-06 | ジェネシス ロボティクス エルエルピー | 歩行を可能にするハンドコントロールを備えたエクソスケルトンスーツ |
| US10766133B2 (en) | 2014-05-06 | 2020-09-08 | Sarcos Lc | Legged robotic device utilizing modifiable linkage mechanism |
| US10391634B2 (en) | 2014-05-16 | 2019-08-27 | Massachusetts Institute Of Technology | Apparatus and method for supporting a human body using supernumerary artificial limbs |
| US10561568B1 (en) | 2014-06-19 | 2020-02-18 | Lockheed Martin Corporation | Exoskeleton system providing for a load transfer when a user is standing and kneeling |
| US9499219B1 (en) | 2014-08-25 | 2016-11-22 | Google Inc. | Touch-down sensing for robotic devices |
| JP6104867B2 (ja) * | 2014-09-19 | 2017-03-29 | Thk株式会社 | ロボット上半身の支持構造 |
| CN104669249B (zh) * | 2015-02-01 | 2016-05-04 | 襄阳新火炬科技有限公司 | 一种液压驱动式机器人 |
| DE112016002060T5 (de) * | 2015-05-05 | 2018-01-18 | Ekso Bionics, Inc. | Sicherstellen eines Eingriffs eines Anwenders in einer bionischen Vorrichtung eines Exoskeletts |
| US10548800B1 (en) | 2015-06-18 | 2020-02-04 | Lockheed Martin Corporation | Exoskeleton pelvic link having hip joint and inguinal joint |
| US10195736B2 (en) | 2015-07-17 | 2019-02-05 | Lockheed Martin Corporation | Variable force exoskeleton hip joint |
| US10518404B2 (en) | 2015-07-17 | 2019-12-31 | Lockheed Martin Corporation | Variable force exoskeleton hip joint |
| KR102481533B1 (ko) | 2015-09-04 | 2022-12-26 | 삼성전자주식회사 | 운동 보조 장치 및 이를 제어하는 방법 |
| US10912346B1 (en) | 2015-11-24 | 2021-02-09 | Lockheed Martin Corporation | Exoskeleton boot and lower link |
| US10124484B1 (en) | 2015-12-08 | 2018-11-13 | Lockheed Martin Corporation | Load-bearing powered exoskeleton using electromyographic control |
| CN105438309B (zh) * | 2015-12-17 | 2017-07-14 | 常州大学 | 仿人机器人两自由度混联抗冲击机械足 |
| CN105501325B (zh) * | 2015-12-17 | 2017-08-01 | 常州大学 | 仿人机器人两自由度并联减振机械足 |
| FR3053242B1 (fr) * | 2016-07-04 | 2018-06-29 | Commissariat A L`Energie Atomique Et Aux Energies Alternatives | Exosquelette ambulatoire - procede de commande d'un exosquelette ambulatoire |
| CN106112988B (zh) * | 2016-08-18 | 2018-05-22 | 黄河科技学院 | 用于连接四肢外骨骼机构的人体躯干机械外骨骼装置 |
| WO2018065967A1 (en) * | 2016-10-07 | 2018-04-12 | Rewalk Robotics Ltd. | Devices, systems and methods for pressure detection in an exoskeleton system |
| US10828767B2 (en) | 2016-11-11 | 2020-11-10 | Sarcos Corp. | Tunable actuator joint modules having energy recovering quasi-passive elastic actuators with internal valve arrangements |
| US10919161B2 (en) | 2016-11-11 | 2021-02-16 | Sarcos Corp. | Clutched joint modules for a robotic system |
| US10765537B2 (en) | 2016-11-11 | 2020-09-08 | Sarcos Corp. | Tunable actuator joint modules having energy recovering quasi-passive elastic actuators for use within a robotic system |
| US10821614B2 (en) | 2016-11-11 | 2020-11-03 | Sarcos Corp. | Clutched joint modules having a quasi-passive elastic actuator for a robotic assembly |
| US11642272B2 (en) * | 2017-03-22 | 2023-05-09 | Ekso Bionics Holdings, Inc. | Mobility assistance devices with automated assessment and adjustment control |
| CN108942879B (zh) * | 2017-05-19 | 2021-03-12 | 中国航天时代电子公司 | 一种可穿戴全关节双向力反馈一体化闭环操控装置和方法 |
| RU2645804C1 (ru) * | 2017-06-07 | 2018-02-28 | Дмитрий Андреевич Журавлёв | Бионический экзоскелет |
| EP3675726A4 (en) | 2017-08-30 | 2021-04-28 | Lockheed Martin Corporation | AUTOMATIC SENSOR SELECTION |
| DE102017123574A1 (de) * | 2017-10-10 | 2019-04-11 | Exoiq Gmbh | System zur muskelkraftunterstützung |
| US10835444B2 (en) * | 2017-11-13 | 2020-11-17 | Free Bionics Taiwan Inc. | Shoe assembly for a walking assist device |
| US10843330B2 (en) | 2017-12-07 | 2020-11-24 | Sarcos Corp. | Resistance-based joint constraint for a master robotic system |
| US11331809B2 (en) | 2017-12-18 | 2022-05-17 | Sarcos Corp. | Dynamically controlled robotic stiffening element |
| WO2019123374A1 (en) * | 2017-12-21 | 2019-06-27 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant'anna | Wearable robot with perfected control architecture |
| CN108542393B (zh) * | 2018-03-30 | 2024-08-02 | 深圳市丞辉威世智能科技有限公司 | 足底传感装置和穿戴式外骨骼 |
| RU187357U1 (ru) * | 2018-04-06 | 2019-03-01 | Федеральное государственное казенное военное образовательное учреждение высшего образования "Военная академия материально-технического обеспечения имени генерала армии А.В. Хрулёва" Министерства обороны Российской Федерации | Устройство крепления потенциально опасных изделий универсального общевойскового экзоскелета |
| CN208799474U (zh) * | 2018-07-05 | 2019-04-30 | 北京京东方光电科技有限公司 | 一种用于人体腿部康复训练的柔性服 |
| US10906191B2 (en) | 2018-12-31 | 2021-02-02 | Sarcos Corp. | Hybrid robotic end effector |
| US11351675B2 (en) | 2018-12-31 | 2022-06-07 | Sarcos Corp. | Robotic end-effector having dynamic stiffening elements for conforming object interaction |
| US11241801B2 (en) | 2018-12-31 | 2022-02-08 | Sarcos Corp. | Robotic end effector with dorsally supported actuation mechanism |
| US10765911B1 (en) | 2019-03-01 | 2020-09-08 | Dustin Hamoy | Core exercise assembly |
| JP7132159B2 (ja) * | 2019-03-11 | 2022-09-06 | 本田技研工業株式会社 | 動作支援装置の制御装置 |
| CN110834318B (zh) * | 2019-11-16 | 2021-06-01 | 兵器工业卫生研究所 | 一种主动助力装甲车救援外骨骼机器人 |
| US11298287B2 (en) | 2020-06-02 | 2022-04-12 | Dephy, Inc. | Systems and methods for a compressed controller for an active exoskeleton |
| US11148279B1 (en) | 2020-06-04 | 2021-10-19 | Dephy, Inc. | Customized configuration for an exoskeleton controller |
| US11147733B1 (en) | 2020-06-04 | 2021-10-19 | Dephy, Inc. | Systems and methods for bilateral wireless communication |
| US11389367B2 (en) * | 2020-06-05 | 2022-07-19 | Dephy, Inc. | Real-time feedback-based optimization of an exoskeleton |
| US12090069B2 (en) | 2020-08-25 | 2024-09-17 | Dephy, Inc. | Systems and methods for a water resistant active exoskeleton |
| US11173093B1 (en) | 2020-09-16 | 2021-11-16 | Dephy, Inc. | Systems and methods for an active exoskeleton with local battery |
| US20220176559A1 (en) | 2020-12-07 | 2022-06-09 | Sarcos Corp. | Method for Redundant Control Policies for Safe Operation of an Exoskeleton |
| US20220176561A1 (en) | 2020-12-07 | 2022-06-09 | Sarcos Corp. | Sensor Suite Discrepancy Detection System for Safe Operation of an Exoskeleton |
| US11833676B2 (en) | 2020-12-07 | 2023-12-05 | Sarcos Corp. | Combining sensor output data to prevent unsafe operation of an exoskeleton |
| US20220176547A1 (en) | 2020-12-07 | 2022-06-09 | Sarcos Corp. | Method for Sensor Suite Discrepancy Detection and Safe Operation of a Robotic Exoskeleton |
| US20220176558A1 (en) | 2020-12-07 | 2022-06-09 | Sarcos Corp. | Redundant Control Policies for Safe Operation of an Exoskeleton |
| US11794345B2 (en) | 2020-12-31 | 2023-10-24 | Sarcos Corp. | Unified robotic vehicle systems and methods of control |
| DE112021007650T5 (de) * | 2021-07-21 | 2024-04-11 | Fanuc Corporation | Roboter-steuerungsvorrichtung, die den roboter auf der grundlage von vorrichtungsdaten steuert, und korrekturvorrichtung für das betriebsprogramm |
| USD1005361S1 (en) | 2021-08-13 | 2023-11-21 | Festool Gmbh | Wearable robotic exoskeleton with belts |
| US11826907B1 (en) | 2022-08-17 | 2023-11-28 | Sarcos Corp. | Robotic joint system with length adapter |
| US11717956B1 (en) | 2022-08-29 | 2023-08-08 | Sarcos Corp. | Robotic joint system with integrated safety |
| US11897132B1 (en) | 2022-11-17 | 2024-02-13 | Sarcos Corp. | Systems and methods for redundant network communication in a robot |
| US11924023B1 (en) | 2022-11-17 | 2024-03-05 | Sarcos Corp. | Systems and methods for redundant network communication in a robot |
Family Cites Families (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3358678A (en) * | 1964-07-29 | 1967-12-19 | Kultsar Emery | Moving and support system for the human body |
| US3449769A (en) * | 1966-06-27 | 1969-06-17 | Cornell Aeronautical Labor Inc | Powered exoskeletal apparatus for amplifying human strength in response to normal body movements |
| US3535711A (en) * | 1967-11-01 | 1970-10-27 | Gen Electric | Cutaneous stimuli sensor and transmission network |
| JPS63150175A (ja) * | 1986-12-15 | 1988-06-22 | 工業技術院長 | 歩行ロボツトの脚機構 |
| US5101427A (en) * | 1988-11-16 | 1992-03-31 | Canon Kabushiki Kaisha | Communication apparatus connected to ISDN |
| JPH03165765A (ja) * | 1989-11-27 | 1991-07-17 | Koyou Sokushin Jigyodan | 介護作業補助装置 |
| US5117814A (en) * | 1990-03-16 | 1992-06-02 | Q-Motus, Inc. | Dynamic splint |
| JPH0413580A (ja) * | 1990-04-28 | 1992-01-17 | Sumitomo Heavy Ind Ltd | 建築作業用マニピュレータ |
| US5101472A (en) * | 1990-10-04 | 1992-03-31 | Repperger Daniel W | Military robotic controller with majorizing function and nonlinear torque capability |
| US5282460A (en) * | 1992-01-06 | 1994-02-01 | Joyce Ann Boldt | Three axis mechanical joint for a power assist device |
| US5516249A (en) * | 1994-05-10 | 1996-05-14 | Technical Research Associates, Inc. | Exoskeleton with kinesthetic feedback and robotic control |
| JP2761574B2 (ja) * | 1994-07-06 | 1998-06-04 | 工業技術院長 | 力補助装置の制御方法及びその装置 |
| JP3706655B2 (ja) | 1994-09-09 | 2005-10-12 | 本田技研工業株式会社 | リンク装置及び人工ハンド |
| CN1067001C (zh) * | 1995-09-11 | 2001-06-13 | 株式会社安川电机 | 机器人控制方法 |
| US5865770A (en) * | 1995-12-06 | 1999-02-02 | Schectman; Leonard A. | Device to counteract paralysis |
| JPH1142259A (ja) * | 1997-07-28 | 1999-02-16 | Technol Res Assoc Of Medical & Welfare Apparatus | 歩行補助装具 |
| US6016385A (en) * | 1997-08-11 | 2000-01-18 | Fanu America Corp | Real time remotely controlled robot |
| JPH1156931A (ja) | 1997-08-21 | 1999-03-02 | Tadao Totsuka | 移搬支援ロボット |
| JP3999888B2 (ja) * | 1998-02-24 | 2007-10-31 | 松下電工株式会社 | 抱き上げ補助装置及びその制御方法 |
| JP2000070312A (ja) * | 1998-09-02 | 2000-03-07 | Yamaha Motor Co Ltd | 介護用補助装置 |
| US6890747B2 (en) * | 2000-10-23 | 2005-05-10 | Warner-Lambert Company | Phosphoinositide 3-kinases |
| JP3701582B2 (ja) * | 2001-05-22 | 2005-09-28 | 独立行政法人科学技術振興機構 | イグゾスケルトン装置、イグゾスケルトンサイボーグ装置及び、イグゾスケルトンサイボーグシステム |
| JP4188607B2 (ja) | 2001-06-27 | 2008-11-26 | 本田技研工業株式会社 | 二足歩行移動体の床反力推定方法及び二足歩行移動体の関節モーメント推定方法 |
| CN1294355C (zh) * | 2001-07-05 | 2007-01-10 | 萨科斯投资公司 | 快速响应动力转换装置 |
| WO2003032833A1 (fr) * | 2001-10-16 | 2003-04-24 | Honda Giken Kogyo Kabushiki Kaisha | Dispositif et procede pour determiner une condition de marche |
| FR2839916B1 (fr) | 2002-05-22 | 2004-10-15 | Agence Spatiale Europeenne | Exosquelette pour bras humain, notamment pour des applications spatiales |
| JP2004105261A (ja) | 2002-09-13 | 2004-04-08 | Matsushita Electric Ind Co Ltd | 身体装着型パワーアシスト機器 |
| US7402142B2 (en) * | 2002-09-23 | 2008-07-22 | Honda Giken Kogyo Kabushiki Kaisha | Method and processor for obtaining moments and torques in a biped walking system |
| US7396337B2 (en) * | 2002-11-21 | 2008-07-08 | Massachusetts Institute Of Technology | Powered orthotic device |
| US6966882B2 (en) * | 2002-11-25 | 2005-11-22 | Tibion Corporation | Active muscle assistance device and method |
| JP4120008B2 (ja) * | 2003-02-25 | 2008-07-16 | 独立行政法人科学技術振興機構 | 運動機能補助装置 |
| KR20060015557A (ko) * | 2003-04-28 | 2006-02-17 | 스티븐 제임스 크램톤 | 외골격을 구비한 cmm 암 |
| US7628218B2 (en) | 2003-07-17 | 2009-12-08 | Roynat Inc. | Apparatus for attaching a ground-engaging tool to an implement frame |
| US7549969B2 (en) * | 2003-09-11 | 2009-06-23 | The Cleveland Clinic Foundation | Apparatus for assisting body movement |
| JP4503311B2 (ja) | 2004-02-25 | 2010-07-14 | 本田技研工業株式会社 | 脚体運動補助装具の発生トルク制御方法 |
| DE102004029513B3 (de) | 2004-06-18 | 2005-09-29 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung zur autarken Eigenfortbewegungsunterstützung und/oder -kontrolle eines gehbehinderten Menschen |
| US7066116B2 (en) | 2004-07-29 | 2006-06-27 | Sarcos Investments Lc | Valve system for a rapid response power conversion device |
| JP4107595B2 (ja) * | 2004-08-12 | 2008-06-25 | 茨城県 | 擬似ウェアラブルリフト |
| US7524297B2 (en) * | 2004-09-08 | 2009-04-28 | Honda Motor Co., Ltd. | Walking assistance device provided with a force sensor |
| US20090149783A1 (en) * | 2004-11-30 | 2009-06-11 | Eidgenossische Technische Hochschule Zurich | System And Method For A Cooperative Arm Therapy And Corresponding Rotation Module |
| JP4541867B2 (ja) | 2004-12-16 | 2010-09-08 | 本田技研工業株式会社 | 外力制御方法、外力制御システム及び外力制御プログラム |
| JP4426432B2 (ja) * | 2004-12-17 | 2010-03-03 | 本田技研工業株式会社 | 脚体運動補助装具の補助モーメント制御方法 |
| US8849457B2 (en) * | 2006-07-17 | 2014-09-30 | Raytheon Company | Contact displacement actuator system |
-
2007
- 2007-07-16 US US11/879,448 patent/US8849457B2/en active Active
- 2007-07-17 EP EP07872565.2A patent/EP2043823B1/en active Active
- 2007-07-17 WO PCT/US2007/016336 patent/WO2008094191A2/en active Application Filing
- 2007-07-17 JP JP2009520827A patent/JP5420405B2/ja active Active
- 2007-07-17 CN CN200780027195.7A patent/CN101489732B/zh not_active Expired - Fee Related
- 2007-07-17 KR KR1020097003178A patent/KR101514467B1/ko active IP Right Grant
- 2007-07-17 EP EP13156628.3A patent/EP2626176A1/en not_active Withdrawn
-
2012
- 2012-11-12 JP JP2012248425A patent/JP2013082065A/ja active Pending
-
2014
- 2014-09-29 JP JP2014198301A patent/JP2015027730A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP2626176A1 (en) | 2013-08-14 |
| US8849457B2 (en) | 2014-09-30 |
| US20090210093A1 (en) | 2009-08-20 |
| EP2043823A2 (en) | 2009-04-08 |
| EP2043823B1 (en) | 2014-06-25 |
| KR101514467B1 (ko) | 2015-04-22 |
| WO2008094191A3 (en) | 2008-10-02 |
| JP2013082065A (ja) | 2013-05-09 |
| JP2015027730A (ja) | 2015-02-12 |
| WO2008094191A2 (en) | 2008-08-07 |
| JP2009543706A (ja) | 2009-12-10 |
| CN101489732B (zh) | 2015-01-28 |
| KR20090040338A (ko) | 2009-04-23 |
| CN101489732A (zh) | 2009-07-22 |
| EP2043823A4 (en) | 2010-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5420405B2 (ja) | ロボット骨組、外骨格構造体、装着式のロボットシステム、人体と協調して装着式のロボット骨組を同時に動かす方法、装着式の人間の外骨格を人体の動きと協調して動かせるようにする方法 | |
| JP2009543706A5 (ja) | ||
| Kazerooni et al. | That which does not stabilize, will only make us stronger | |
| Wang et al. | Design and control of the MINDWALKER exoskeleton | |
| Kazerooni et al. | The Berkeley lower extremity exoskeleton | |
| Zoss et al. | Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX) | |
| Surdilovic et al. | STRING-MAN: a new wire robot for gait rehabilitation | |
| US10206844B2 (en) | Interface for adjusting the motion of a powered orthotic device through externally applied forces | |
| Surdilovic et al. | STRING-MAN: Wire-robot technology for safe, flexible and human-friendly gait rehabilitation | |
| Reyes et al. | Shoulder-Support Exoskeletons for Overhead Work: Current State, Challenges and Future Directions | |
| Nakamura et al. | Realizing model-based wearable antigravity muscles support with dynamics terms | |
| Al-Shuka et al. | On high-level control of power-augmentation lower extremity exoskeletons: Human walking intention | |
| Huang et al. | Hybrid control of the Berkeley lower extremity exoskeleton (BLEEX) | |
| Chen et al. | WPAL for enhancing human strength and endurance during walking | |
| Ahmed et al. | Survey of on-line control strategies of human-powered augmentation exoskeleton systems | |
| Tang et al. | Electro-hydraulic servo system for Human Lower-limb Exoskeleton based on sliding mode variable structure control | |
| Chu | Design of the Berkeley lower extremity exoskeleton (BLEEX) | |
| Zheng | Control strategy of lower-limb exoskeleton | |
| Rakshit et al. | A trajectory optimization formulation for assistive robotic devices | |
| Mir-Nasiri | Conceptual design of energy efficient lower extremity exoskeleton for human motion enhancement and medical assistance | |
| Ahmed et al. | Design and Simulation of a 3D Model Lower Limb Exoskeleton for Rehabilitation | |
| Huang | Robotics locomotion control | |
| Tanveer et al. | Exoskeleton-Wheelchair Synergy For Rehabilitation & User Assistance | |
| Chen et al. | A PAWL for enhancing strength and endurance during walking using interaction force and dynamical Information | |
| Alouane | Human centered assistive control strategies for lower limb wearable robotic devices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101008 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20110629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120510 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120808 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120815 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130618 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131022 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5420405 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |