JP5390100B2 - 道路舗装機械の監視方法及びその監視装置 - Google Patents
道路舗装機械の監視方法及びその監視装置 Download PDFInfo
- Publication number
- JP5390100B2 JP5390100B2 JP2007546084A JP2007546084A JP5390100B2 JP 5390100 B2 JP5390100 B2 JP 5390100B2 JP 2007546084 A JP2007546084 A JP 2007546084A JP 2007546084 A JP2007546084 A JP 2007546084A JP 5390100 B2 JP5390100 B2 JP 5390100B2
- Authority
- JP
- Japan
- Prior art keywords
- height
- processing machine
- working
- road processing
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 35
- 238000012544 monitoring process Methods 0.000 title description 7
- 238000012545 processing Methods 0.000 claims description 69
- 238000005259 measurement Methods 0.000 claims description 24
- 230000003287 optical effect Effects 0.000 claims description 8
- 230000005484 gravity Effects 0.000 claims description 6
- 239000007787 solid Substances 0.000 claims description 4
- 238000004891 communication Methods 0.000 claims description 3
- 238000011156 evaluation Methods 0.000 claims 3
- 238000004886 process control Methods 0.000 abstract 1
- 239000010426 asphalt Substances 0.000 description 15
- 239000000463 material Substances 0.000 description 10
- 238000010276 construction Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 239000000969 carrier Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000001010 compromised effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images

Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/004—Devices for guiding or controlling the machines along a predetermined path
- E01C19/006—Devices for guiding or controlling the machines along a predetermined path by laser or ultrasound
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/48—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Road Paving Machines (AREA)
- Road Repair (AREA)
- Lifting Devices For Agricultural Implements (AREA)
Description
Claims (18)
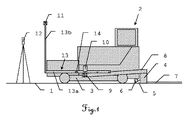
- 基礎表面上を走行する道路処理機械(2)の基礎表面(1)に対して高さが垂直方向に調整可能に配置された作業部(4)の高さ位置を所要の高さ位置となるように制御するための方法であって、
道路処理機械(2)に配置された位置要素(11)の少なくとも高さ位置が測定されるステップと、
道路処理機械(2)に設けられたセンサーによる測定値に基づき、位置要素(11)及び作業部(4)の高さの差が決定されるステップと、
位置要素(11)の高さ位置と、位置要素(11)及び作業部(4)の高さの差とを用いて、作業部(4)の高さ位置が決定されるステップと、
該作業部(4)の高さ位置及び所要の高さ位置を比較して、作業部(4)が所要の高さ位置となるように作業部(4)を昇降させるステップと、
を含み、
位置要素(11)は、走行方向における道路処理機械(2)の重心よりも前方で、作業部(4)から水平方向に離れた位置であって、道路処理機械(2)の前端、かつ道路処理機械(2)の側方の縁部領域内に配置される、
ことを特徴とする方法。 - 位置要素(11)は、道路処理機械(2)の少なくとも長手方向の全長の半分以上、作業部(4)から離れた位置にある、請求項1に記載の方法。
- 位置要素(11)は、走行方向における道路処理機械(2)の前端の、最も左又は最も右に配置され、作業部(4)は、走行方向における道路処理機械(2)の後端に配置される、請求項1に記載の方法。
- 位置要素(11)及び作業部(4)の間を連結する傾動可能な固定リンク(13)を備えた、請求項1〜3のいずれか1項に記載の方法。
- 固定リンク(13)に配置された少なくとも1つの傾斜センサー(14)により、固定リンク(13)の垂直線または水平線に対する傾斜角が測定され、測定された固定リンク(13)の傾斜角に基づいて位置要素(11)及び作業部(4)の高さの差が定められる、請求項4に記載の方法。
- 固定リンク(13)に配置され、異なる方向に指向させた2つの傾斜センサー(14)により、固定リンク(13)の垂直線または水平線に対する傾斜角が測定され、測定された固定リンク(13)の傾斜角に基づいて位置要素(11)及び作業部(4)の高さの差が定められる、請求項5に記載の方法。
- 位置要素(11)及び作業部(4)の距離と、測定された固定リンク(13)の傾斜角に基づく位置要素(11)及び作業部(4)を結ぶ直線の垂直線または水平線に対する傾きとに基づいて、位置要素(11)及び作業部(4)の高さの差が定められる、請求項5又は6に記載の方法。
- 第1の時間において、位置要素(11)の基礎表面(1)に対する少なくとも1つの第1の距離が測定され、第1の時間と異なる第2の時間において、作業部(4)の基礎表面(1)に対する少なくとも1つの第2の距離が測定され、これら2つの測定がほぼ同じ測定地点で行われるように、第1の時間と第2の時間との時間差が、道路処理機械(2)の走行速度、又は予め決定された位置に基づいて選択される、請求項1〜3のいずれか1項に記載の方法。
- 測定地点の高さ位置は、位置要素(11)の高さ位置、及び少なくとも1つの第1の距離から導き出され、道路処理機械(2)が走行している間に、基礎表面(1)の高さ位置が、少なくとも走行経路に沿って決定される、請求項8に記載の方法。
- 作業部(4)の高さ位置は、位置要素(11)の高さ位置、少なくとも1つの第1の距離、及び少なくとも1つの第2の距離から導き出され、道路処理機械(2)が走行している間に、作業部(4)の高さ位置が所要の高さ位置となるように、少なくとも走行経路に沿って制御される、請求項8に記載の方法。
- 基礎表面(1)上で移動可能な道路処理機械(2)であって、
基礎表面(1)に対して高さが垂直方向に調整可能な作業部(4)と、位置要素(11)と、位置要素(11)及び作業部(4)の高さの差を定めるための少なくとも1つの基準センサーと、を備え、
位置要素(11)は、走行方向における道路処理機械(2)の重心よりも前方で、作業部(4)から離れた位置であって、道路処理機械(2)の前端、かつ道路処理機械(2)の側方の縁部領域内に配置され、
位置要素(11)と光学的につながった少なくとも1つのトータルレーザーステーション(12)によって、位置要素(11)の高さ位置を測定されることが可能であり、
評価及び制御装置によって、基準センサーによる測定値に基づき、位置要素(11)及び作業部(4)の高さの差が決定され、
位置要素(11)の高さ位置と、位置要素(11)及び作業部(4)の高さの差とを用いて、作業部(4)の高さ位置が決定され、
該作業部(4)の高さ位置及び所要の高さ位置を比較して、作業部(4)の高さ位置が所要の高さ位置となるように作業部(4)を昇降させる、
ことを特徴とする道路処理機械。 - 位置要素(11)は、道路処理機械(2)の少なくとも長手方向の全長の半分以上、作業部(4)から離れた位置にある、請求項11に記載の道路処理機械。
- 位置要素(11)は、走行方向における道路処理機械(2)の前端の、最も左又は最も右に配置され、作業部(4)は、走行方向における道路処理機械(2)の後端に配置される、請求項11又は12に記載の道路処理機械。
- 作業部(4)が、スクリードビームの形態である、請求項11〜13のいずれか1項に記載の道路処理機械。
- 少なくとも1つの基準センサーが、位置要素(11)と作業部(4)と間の固定リンク(13)に配置された傾斜センサーの形態であり、位置要素(11)及び作業部(4)の高さの差を得ることを可能にする、請求項11〜14のいずれか1項に記載の道路処理機械。
- 基準センサーが、位置要素(11)に配置された第1の距離センサー(15)と、作業部(4)に配置された第2の距離センサー(16)とを含み、これら第1及び第2の距離センサー(15、16)は、基礎表面(1)までの距離測定が、走行速度に基づく異なる時間に行われ、かつ、これら2回の距離測定が、ほぼ同じ測定地点で行われるように配置されている、請求項11〜15のいずれか1項に記載の道路処理機械。
- 請求項11〜16のいずれか1項に記載の、道路処理機械(2)と、トータルステーション(12)と、評価及び制御装置とを含む、
基礎表面上を走行する道路処理機械(2)の基礎表面(1)に対して高さが垂直方向に調整可能に配置された作業部(4)の高さ位置を所要の高さ位置となるように制御するためのシステム。 - 評価及び制御装置は、道路処理機械(2)に配置されている、請求項17に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP04029963A EP1672122A1 (de) | 2004-12-17 | 2004-12-17 | Verfahren und Vorrichtung vom Kontrollieren einer Strassenbearbeitungsmaschine |
| EP04029963.8 | 2004-12-17 | ||
| PCT/EP2005/056932 WO2006064062A1 (de) | 2004-12-17 | 2005-12-19 | Verfahren und vorrichtung zum kontrollieren einer strassenbearbeitungsmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008524473A JP2008524473A (ja) | 2008-07-10 |
| JP5390100B2 true JP5390100B2 (ja) | 2014-01-15 |
Family
ID=34927826
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007546084A Active JP5390100B2 (ja) | 2004-12-17 | 2005-12-19 | 道路舗装機械の監視方法及びその監視装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US7643923B2 (ja) |
| EP (2) | EP1672122A1 (ja) |
| JP (1) | JP5390100B2 (ja) |
| CN (1) | CN101072916B (ja) |
| AT (1) | ATE434086T1 (ja) |
| AU (1) | AU2005315566B2 (ja) |
| CA (1) | CA2591563C (ja) |
| DE (1) | DE502005007537D1 (ja) |
| WO (1) | WO2006064062A1 (ja) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9963836B1 (en) | 2005-02-23 | 2018-05-08 | Gomaco Corporation | Method for operating paving train machines |
| US8855967B1 (en) * | 2011-11-02 | 2014-10-07 | Gomaco Corporation | Surface data measurement system and method |
| US9200414B1 (en) | 2011-11-02 | 2015-12-01 | Gomaco Corporation | Stringless paving train method and apparatus |
| US7617061B2 (en) * | 2006-11-03 | 2009-11-10 | Topcon Positioning Systems, Inc. | Method and apparatus for accurately determining height coordinates in a satellite/laser positioning system |
| US8070385B2 (en) | 2008-07-21 | 2011-12-06 | Caterpillar Trimble Control Technologies, Llc | Paving machine control and method |
| US8220806B2 (en) * | 2009-01-13 | 2012-07-17 | Roger Hartel Neudeck | Surface milling system |
| PL2256246T3 (pl) * | 2009-05-20 | 2018-11-30 | Joseph Vögele AG | Ciąg do tworzenia nawierzchni drogowej dla utworzenia nawierzchni drogowej |
| DE102009059106A1 (de) * | 2009-12-18 | 2011-06-22 | Wirtgen GmbH, 53578 | Selbstfahrende Baumaschine und Verfahren zur Steuerung einer selbstfahrenden Baumaschine |
| PL2366830T3 (pl) | 2010-03-18 | 2016-11-30 | System i sposób dla nanoszenia nawierzchni drogowej | |
| CN102261032B (zh) * | 2011-05-04 | 2012-09-26 | 三一重工股份有限公司 | 一种摊铺机及其找平控制装置 |
| US9869063B1 (en) | 2011-11-02 | 2018-01-16 | Gomaco Corporation | Stringless paving train method and apparatus |
| DE102012001289A1 (de) * | 2012-01-25 | 2013-07-25 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| US8989968B2 (en) | 2012-10-12 | 2015-03-24 | Wirtgen Gmbh | Self-propelled civil engineering machine system with field rover |
| US9096977B2 (en) | 2013-05-23 | 2015-08-04 | Wirtgen Gmbh | Milling machine with location indicator system |
| CN104121477B (zh) * | 2014-07-17 | 2017-03-01 | 上海雷尼威尔技术有限公司 | 车用lng气罐控制系统及方法 |
| CN104099854B (zh) * | 2014-07-31 | 2016-02-10 | 中联重科股份有限公司 | 找平仪调节装置及其调节方法、摊铺机 |
| DE102014012825A1 (de) | 2014-08-28 | 2016-03-03 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zur Steuerung einer selbstfahrenden Baumaschine |
| DE102014012831B4 (de) | 2014-08-28 | 2018-10-04 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| DE102014012836B4 (de) | 2014-08-28 | 2018-09-13 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zur Visualisierung des Bearbeitungsumfeldes einer sich im Gelände bewegenden Baumaschine |
| GB201419182D0 (en) * | 2014-10-28 | 2014-12-10 | Nlink As | Mobile robotic drilling apparatus and method for drilling ceillings and walls |
| US9869286B1 (en) * | 2014-11-18 | 2018-01-16 | Carl M. Clark | Vehicle rollover safety device |
| US10539084B2 (en) | 2014-11-18 | 2020-01-21 | Carl M. Clark | Vehicle rollover safety device utilizing a circular arc level |
| US9624643B2 (en) | 2015-02-05 | 2017-04-18 | Deere & Company | Blade tilt system and method for a work vehicle |
| US9551130B2 (en) | 2015-02-05 | 2017-01-24 | Deere & Company | Blade stabilization system and method for a work vehicle |
| US9328479B1 (en) | 2015-02-05 | 2016-05-03 | Deere & Company | Grade control system and method for a work vehicle |
| JP6672300B2 (ja) * | 2015-07-15 | 2020-03-25 | 住友建機株式会社 | アスファルトフィニッシャ |
| EP3123867B1 (de) * | 2015-07-30 | 2017-12-20 | Albert Handtmann Maschinenfabrik GmbH & Co. KG | Verfahren und vorrichtung zur vereinfachten ausrichtung einer füllmaschine zur wurstherstellung |
| AT517924B1 (de) * | 2015-11-10 | 2019-10-15 | Dipl Ing Guenther Lehmann | Markiersystem |
| CN106968155A (zh) * | 2017-05-23 | 2017-07-21 | 山东奥邦机械设备制造有限公司 | 一种沥青摊铺机 |
| DE102017010238A1 (de) * | 2017-11-03 | 2019-05-09 | Bomag Gmbh | Messung der Einbauschichtdicke durch Straßenwalze |
| JP7022601B2 (ja) * | 2018-01-23 | 2022-02-18 | 株式会社トプコン | 測量装置および測量方法 |
| US10563362B2 (en) * | 2018-06-01 | 2020-02-18 | Caterpillar Paving Products Inc. | System and method for paving machine control |
| DE102018119962A1 (de) | 2018-08-16 | 2020-02-20 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| CN109186544A (zh) * | 2018-11-09 | 2019-01-11 | 湖南联智桥隧技术有限公司 | 一种临空界面高程测量的方法及装置 |
| EP3660598B1 (en) * | 2018-11-30 | 2021-10-20 | MOBA Mobile Automation AG | Automatic application of local specification |
| CN110004800A (zh) * | 2019-04-10 | 2019-07-12 | 安徽开源路桥有限责任公司 | 基于3d数字控制系统的沥青混凝土路面施工设备及施工方法 |
| DE102019118059A1 (de) | 2019-07-04 | 2021-01-07 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| CN110568844B (zh) * | 2019-08-23 | 2022-03-29 | 东南大学 | 无人驾驶压路机直线行驶激光辅助定位系统 |
| DE102019135225B4 (de) | 2019-12-19 | 2023-07-20 | Wirtgen Gmbh | Verfahren zum Abfräsen von Verkehrsflächen mit einer Fräswalze, sowie Fräsmaschine zur Durchführung des Verfahrens zum Abfräsen von Verkehrsflächen |
| CH717191A1 (de) * | 2020-03-04 | 2021-09-15 | Kibag Bauleistungen Ag | Vorrichtung zum Einbau von Gussasphalt auf einem Fahrbahnuntergrund und Verfahren zur Fertigung einer Asphaltfahrbahn. |
| EP3981918B1 (de) * | 2020-10-08 | 2024-03-13 | Joseph Vögele AG | Strassenfertiger sowie verfahren zum nivellieren der einbaubohle eines strassenfertigers |
| EP4083322A1 (en) | 2021-04-27 | 2022-11-02 | Leica Geosystems AG | System and method for controlling a road construction process |
| US11834797B2 (en) * | 2021-09-08 | 2023-12-05 | Caterpillar Paving Products Inc. | Automatic smoothness control for asphalt paver |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4807131A (en) * | 1987-04-28 | 1989-02-21 | Clegg Engineering, Inc. | Grading system |
| US4895440A (en) * | 1988-08-22 | 1990-01-23 | Spectra-Physics, Inc. | Laser-based measurement system |
| EP0443026A4 (en) * | 1989-09-14 | 1993-03-24 | Kabushiki Kaisha Komatsu Seisakusho | Blade controller of bulldozer |
| US5375663A (en) * | 1993-04-01 | 1994-12-27 | Spectra-Physics Laserplane, Inc. | Earthmoving apparatus and method for grading land providing continuous resurveying |
| JP3541960B2 (ja) * | 1993-12-24 | 2004-07-14 | 独立行政法人土木研究所 | 建設機械の3次元位置自動制御方法 |
| US5964298A (en) * | 1994-06-13 | 1999-10-12 | Giganet, Inc. | Integrated civil engineering and earthmoving system |
| US5549412A (en) | 1995-05-24 | 1996-08-27 | Blaw-Knox Construction Equipment Corporation | Position referencing, measuring and paving method and apparatus for a profiler and paver |
| US5612864A (en) * | 1995-06-20 | 1997-03-18 | Caterpillar Inc. | Apparatus and method for determining the position of a work implement |
| US5764511A (en) * | 1995-06-20 | 1998-06-09 | Caterpillar Inc. | System and method for controlling slope of cut of work implement |
| DE19647150C2 (de) | 1996-11-14 | 2001-02-01 | Moba Mobile Automation Gmbh | Vorrichtung und Verfahren zum Steuern der Einbauhöhe eines Straßenfertigers |
| SE9704397L (sv) * | 1997-11-28 | 1998-11-16 | Spectra Precision Ab | Anordning och förfarande för att bestämma läget för en bearbetande del |
| US6262294B1 (en) | 1999-02-17 | 2001-07-17 | Agency Of Industrial Science And Technology | Process for continuously producing monomer components from aromatic polyester |
| DE19940404C2 (de) | 1999-08-25 | 2001-07-12 | Moba Mobile Automation Gmbh | Verfahren und Vorrichtung zum dreidimensionalen Steuern einer Baumaschine |
| DE19951297C1 (de) | 1999-10-25 | 2001-04-12 | Moba Mobile Automation Gmbh | Vorrichtung zum Steuern eines Strassenfertigers und Verfahren zum Einbauen einer Strassenschicht |
| DE50008220D1 (de) * | 2000-01-19 | 2004-11-18 | Joseph Voegele Ag | Verfahren zum Steuern einer Baumaschine bzw. eines Strassenfertigers und Strassenfertiger |
| DE10025474B4 (de) * | 2000-05-23 | 2011-03-10 | Moba - Mobile Automation Gmbh | Schichtdickenbestimmung durch relative Lageerfassung zwischen Traktor und Zugarm eines Straßenfertigers |
| DE10060903C2 (de) | 2000-12-07 | 2002-10-31 | Moba Mobile Automation Gmbh | Laser-Höhenregeleinrichtung für eine Baumaschine |
-
2004
- 2004-12-17 EP EP04029963A patent/EP1672122A1/de not_active Withdrawn
-
2005
- 2005-12-19 WO PCT/EP2005/056932 patent/WO2006064062A1/de active Application Filing
- 2005-12-19 AT AT05816965T patent/ATE434086T1/de not_active IP Right Cessation
- 2005-12-19 CA CA2591563A patent/CA2591563C/en active Active
- 2005-12-19 JP JP2007546084A patent/JP5390100B2/ja active Active
- 2005-12-19 AU AU2005315566A patent/AU2005315566B2/en not_active Ceased
- 2005-12-19 US US11/721,976 patent/US7643923B2/en active Active
- 2005-12-19 CN CN2005800418524A patent/CN101072916B/zh active Active
- 2005-12-19 EP EP05816965A patent/EP1825064B1/de active Active
- 2005-12-19 DE DE502005007537T patent/DE502005007537D1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101072916B (zh) | 2012-05-09 |
| US20080208417A1 (en) | 2008-08-28 |
| ATE434086T1 (de) | 2009-07-15 |
| WO2006064062A1 (de) | 2006-06-22 |
| DE502005007537D1 (de) | 2009-07-30 |
| CN101072916A (zh) | 2007-11-14 |
| EP1672122A1 (de) | 2006-06-21 |
| AU2005315566B2 (en) | 2010-07-01 |
| AU2005315566A1 (en) | 2006-06-22 |
| CA2591563A1 (en) | 2006-06-22 |
| US7643923B2 (en) | 2010-01-05 |
| CA2591563C (en) | 2013-08-13 |
| EP1825064B1 (de) | 2009-06-17 |
| JP2008524473A (ja) | 2008-07-10 |
| EP1825064A1 (de) | 2007-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5390100B2 (ja) | 道路舗装機械の監視方法及びその監視装置 | |
| CA2600070C (en) | Method and system for controlling a construction machine | |
| AU2008266427B2 (en) | Optical guidance system for a laying engine for producing a concrete or asphalt top layer | |
| EP0997579B1 (en) | Apparatus and method for three-dimensional contouring | |
| DK3048199T3 (en) | Road finishing machine with layer thickness sensing device and method for recording the thickness of an applied material layer | |
| US8068962B2 (en) | 3D control system for construction machines | |
| US6371566B1 (en) | Process and device for milling off traffic areas | |
| US20170284040A1 (en) | Road Milling Machine and Method for Measuring the Milling Depth | |
| EP2708969B1 (en) | Construction machine control method and construction machine control system | |
| EP0401260B1 (en) | A method of and an equipment for determining the position of a track | |
| CN113005868B (zh) | 利用铣刨鼓来铣刨交通区域的方法和执行该方法的铣刨机 | |
| JP7191736B2 (ja) | アスファルトフィニッシャ及びスクリード制御方法 | |
| US20180356521A1 (en) | Odometer for a mobile apparatus, and method | |
| CN115247393B (zh) | 对道路施工过程进行控制的系统和方法 | |
| US20230193571A1 (en) | Leveling controller adaption by ground profile analysis | |
| WO2023151730A1 (en) | Method and device for differential height modification of the surface of the traffic area |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081024 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20091016 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20091020 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20091020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110823 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20111121 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20111129 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20111220 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20111228 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120123 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130308 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130315 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130410 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131010 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5390100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |