JP5363394B2 - 可変分光素子 - Google Patents
可変分光素子 Download PDFInfo
- Publication number
- JP5363394B2 JP5363394B2 JP2010078214A JP2010078214A JP5363394B2 JP 5363394 B2 JP5363394 B2 JP 5363394B2 JP 2010078214 A JP2010078214 A JP 2010078214A JP 2010078214 A JP2010078214 A JP 2010078214A JP 5363394 B2 JP5363394 B2 JP 5363394B2
- Authority
- JP
- Japan
- Prior art keywords
- pair
- angle
- optical substrates
- opposing surfaces
- spectroscopic element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000758 substrate Substances 0.000 claims abstract description 141
- 230000003287 optical effect Effects 0.000 claims abstract description 117
- 230000005484 gravity Effects 0.000 claims abstract description 52
- 230000008859 change Effects 0.000 claims description 9
- 230000004069 differentiation Effects 0.000 claims description 2
- BJQHLKABXJIVAM-UHFFFAOYSA-N bis(2-ethylhexyl) phthalate Chemical compound CCCCC(CC)COC(=O)C1=CC=CC=C1C(=O)OCC(CC)CCCC BJQHLKABXJIVAM-UHFFFAOYSA-N 0.000 description 65
- 230000003595 spectral effect Effects 0.000 description 22
- 238000004364 calculation method Methods 0.000 description 12
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000004044 response Effects 0.000 description 7
- 238000013016 damping Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 239000000463 material Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000004611 spectroscopical analysis Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/12—Generating the spectrum; Monochromators
- G01J3/26—Generating the spectrum; Monochromators using multiple reflection, e.g. Fabry-Perot interferometer, variable interference filters
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Spectrometry And Color Measurement (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
具体的には、前記フィードバック制御が、PID制御であり、前記フィードフォワード制御が、入力値pに対し、
y(t)=(d2 p/dt2+B・dp/dt+C・p)/A
という出力値を出力する制御であることが好ましい。
ただし、A=4k/m(kは前記アクチュエータのバネ定数、mは前記可変分光素子の移動部分の質量)、B=4c/mcは前記アクチュエータのバネ定数がk、前記可変分光素子の移動部分の質量をmとして信号を入力した場合に前記可変分光素子の移動部分の振動の減衰から求められる定数)、C=4k/mである。
x=(x1+x2+x3+x4)/4
sinθ=(x3−x1)/(r31+r33)
sinφ=(x4−x2)/(r32+r34)
r31=r32=r33=r34=r
であり、第1の角度θ及び第2の角度φはいずれも十分に小さいため、第1の角度θ及び第2の角度φは以下の式により求められる。
θ=(x3−x1)/2r
φ=(x4−x2)/2r
x c1=xc−r41sinθc
x c2=xc−r42sinφc
x c3=xc+r43sinθc
x c4=xc+r44sinφc
r41=r42=r43=r44=r
であり、第1の角度についての指令値θc及び第2の角度についての指令値φcはいずれも十分に小さいため、第1〜第4ピエゾ素子41、42、43、44のそれぞれに対する指令値xc1、xc2、xc3、xc4は以下の式により求められる。
xc1=x c −rθc
xc2=x c −rφc
xc3=x c +rθc
xc4=x c +rφc
mx”=Fx=f1+f2+f3+f4
となる。なお、x”は質量mの重心が固定端からxの距離にあるときの並進運動についての加速度、Fxは質量mの重心が固定端からxの距離にあるときの並進運動について質量mに対して加わる力の大きさ、f1、f2、f3、f4はそれぞれ第1〜第4ピエゾ素子41、42、43、44の各々により発生する力の大きさである。
f1=k1(u1−x1)−cx1x1’
f2=k2(u2−x2)−cx2x2’
f3=k3(u3−x3)−cx3x3’
f4=k4(u4−x4)−cx4x4’
となる。なお、u1、u2、u3、u4は一対の光学基板2の面間隔が目標値uとなったときの固定端から第1〜第4ピエゾ素子41、42、43、44までの並進運動に沿う方向の距離、x1、x2、x3、x4は固定端から可動基板22の第1〜第4ピエゾ素子41、42、43、44の配置位置までの並進運動に沿う方向についての距離、x1’、x2’、x3’、x4’は可動基板22の第1〜第4ピエゾ素子41、42、43、44の配置位置における並進運動についての速度である。
k1=k2=k3=k4=k
cx1=cx2=cx3=cx4=cx
であるため、
f1=k(u1−x1)−cxx1’
f2=k(u2−x2)−cxx2’
f3=k(u3−x3)−cxx3’
f4=k(u4−x4)−cxx4’
となる。
x=(x1+x2+x3+x4)/4
となり、x’は固定端から可動基板22の重心G2が距離xにあるときの速度と等しいため、
x’=(x1’+x2’+x3’+x4’)/4
となる。
mx”=Fx=ku1+ku2+ku3+ku4−4kx−4cxx’
となる。
u=(u1+u2+u3+u4)/4
としてラプラス変換すると、
s2X=4k/m・U1〜4−4k/m・X−4c x /m・sX
となり、並進運動についての伝達関数Gxは、
Gx=X/U1〜4
=(4k/m)/(s2+4cx/m・s+4k/m)
=Ax/(s2+Bxs+Cx)
となる。
なお、A x =4k/m(kはアクチュエータのバネ定数、mはエタロン装置の移動部分の質量)は、エタロン装置の出入力特性の感度を表すパラメータである。B x =4c x /m(c x はバネ常数がk、質量がmのときに信号を入力したときの可動基板の振動の減衰から求められる定数)は、減衰特性を示すパラメータであり、このパラメータ値が大きいと減衰特性が良くなり振動が抑制される。C x =4k/mは、振動の周波数に関連したパラメータであり、このパラメータ値が大きいと振動周期が短くなり立ち上がりが高速になる。
Gθ=Θ/U1、3
=(rk/J)/(s2+2cθ/J・s+2r2k/J)
=Aθ/(s2+Bθs+Cθ)
Gφ=Φ/U2、4
=(rk/J)/(s2+2cφ/J・s+2r2k/J)
=Aφ/(s2+Bφs+Cφ)
となる。なお、Jは慣性モーメントであり、エタロン装置の外枠1に対して移動する第1〜第4ピエゾ素子41、42、43、44の質量及び可動基板22の質量によって決まる値である。また、減衰定数cθ、cφは、慣性モーメントJ及びバネ定数k1、k2、k3、k4と信号を入力した際の可動基板22の振動の状態とから求めることのできる定数である。また、Aθ、Aφはエタロン装置の出入力特性の感度を表すパラメータ、Bθ、Bφは減衰特性を示すパラメータ、Cθ、Cφは振動の周波数に関連したパラメータである。
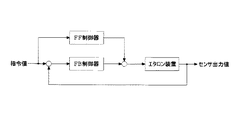
y=G・p
となり、指令値と実際の動作とが一致しない。
y=1/G・G・p
1/G=(s2+Bs+C)/A
である。
y(t)=(d2 p/dt2+B・dp/dt+C・p)/A
11 筒状部材
12,13 環状部材
12a,13a 開口部
2 一対の光学基板
21 固定基板
22 可動基板
31 第1静電容量センサ
32 第2静電容量センサ
33 第3静電容量センサ
34 第4静電容量センサ
311,312,321,322,331,332,341,342 電極
41 第1ピエゾ素子
42 第2ピエゾ素子
43 第3ピエゾ素子
44 第4ピエゾ素子
51 目標値入力部
52 センサ出力変換部
53 差分値算出部
54 指令値算出部
55 指令値変換部
G1 固定基板の対向する面における重心
G2 可動基板の対向する面における重心
Claims (4)
- 間隔を隔てて対向するように配置された一対の光学基板と、各々が前記一対の光学基板の対向する面の夫々に配置された一対の電極部を有していて各々の配置位置における前記一対の光学基板の対向する面同士の面間隔を検出する第1乃至第4静電容量センサと、前記一対の光学基板の少なくとも一方を他方に対して相対的に移動させて前記一対の光学基板の対向する面同士の面間隔を変化させる第1乃至第4アクチュエータを備えた可変分光素子において、
前記第1静電容量センサと第3静電容量センサとが、前記一対の光学基板の対向する面の各々の重心を結んだ線を軸として対称となる位置に配置されており、
前記第2静電容量センサと第4静電容量センサとが、前記一対の光学基板の対向する面の各々の重心を結んだ線を軸として対称となる位置に配置されており、
前記第1乃至第4アクチュエータの各々が、前記一対の光学基板の対向する面の各々の重心から前記第1乃至第4静電容量センサの各々の中心方向へ伸びる線上に配置されており、
前記第1乃至第4静電容量センサによる信号から前記一対の光学基板の対向する面の各々の重心同士の間隔を算出し、前記第1静電容量センサによる信号と前記第3静電容量センサによる信号とから前記重心を結んだ線に垂直な面と移動させる前記光学基板の前記対向する面とがなす第1の角度を算出し、前記第2静電容量センサによる信号と前記第4静電容量センサによる信号とから前記重心を結んだ線に垂直な面と移動させる前記光学基板の前記対向する面とがなす第2の角度を算出し、前記重心同士の間隔及び前記第1の角度に基づいて前記第1及び第3アクチュエータを駆動し、前記重心同士の間隔及び前記第2の角度に基づいて前記第2及び第4アクチュエータを駆動し、前記重心同士の間隔、前記第1の角度及び前記第2の角度についてフィードバック制御を行うとともに、前記重心同士の間隔、前記第1の角度又は前記第2の角度の少なくとも一つについてフィードフォワード制御を行う制御部を備えていることを特徴とする可変分光素子。 - 前記フィードバック制御が、PID制御であり、
前記フィードフォワード制御が、入力値を2階微分した値と、入力値の微分値に前記アクチュエータの減衰定数を乗算し前記可変分光素子の移動部分の質量で除算した値と、入力値に前記アクチュエータのバネ定数を乗算し前記可変分光素子の移動部分の質量で除算した値との和を、前記アクチュエータのバネ定数を前記可変分光素子の移動部分の質量で除算した値で除算した値を出力値として出力する制御であることを特徴とする請求項1に記載の可変分光素子。 - 前記フィードバック制御が、PID制御であり、
前記フィードフォワード制御が、入力値pに対し、
y(t)=(d2 p/dt2+B・dp/dt+C・p)/A
という出力値を出力する制御であることを特徴とする請求項1または請求項2に記載の可変分光素子。
ただし、A=4k/m(kは前記アクチュエータのバネ定数、mは前記可変分光素子の移動部分の質量)、B=4c/m(cは前記アクチュエータのバネ定数がk、前記可変分光素子の移動部分の質量をmとして信号を入力した場合に前記可変分光素子の移動部分の振動の減衰から求められる定数)、C=4k/mである。 - 間隔を隔てて対向するように配置された一対の光学基板と、各々が前記一対の光学基板の対向する面の夫々に配置された一対の電極部を有していて各々の配置位置における前記一対の光学基板の対向する面同士の面間隔を検出する第1乃至第4静電容量センサと、前記一対の光学基板の少なくとも一方を他方に対して相対的に移動させて前記一対の光学基板の対向する面同士の面間隔を変化させる第1乃至第4アクチュエータを備えた可変分光素子において、
前記第1静電容量センサと第3静電容量センサとが、前記一対の光学基板の対向する面の各々の重心を結んだ線を軸として対称となる位置に配置されており、
前記第2静電容量センサと第4静電容量センサとが、前記一対の光学基板の対向する面の各々の重心を結んだ線を軸として対称となる位置に配置されており、
前記第1乃至第4静電容量センサと前記第1乃至第4アクチュエータが、前記一対の光学基板の対向する面の各々の重心を結んだ線を軸として該軸に沿う方向からみて交互に等角度となるように配置されており、
前記第1乃至第4静電容量センサによる信号から前記一対の光学基板の対向する面の各々の重心同士の間隔を算出し、前記第1乃至第4の静電容量センサによる信号から求めた第1及び第3アクチュエータの配置位置における前記一対の光学基板の対向する面同士の面間隔の値を用いて前記重心を結んだ線に垂直な面と移動させる前記光学基板の前記対向する面とがなす第1の角度を算出し、前記第1乃至第4の静電容量センサによる信号から求めた第2及び第4アクチュエータの配置位置における前記一対の光学基板の対向する面同士の面間隔の値を用いて前記重心を結んだ線に垂直な面と移動させる前記光学基板の前記対向する面とがなす第2の角度を算出し、前記重心同士の間隔、前記第1の角度及び前記第2の角度に基づいて前記第1乃至第4アクチュエータを駆動し、前記重心同士の間隔、前記第1の角度及び前記第2の角度についてフィードバック制御を行うとともに、前記重心同士の間隔、前記第1の角度又は前記第2の角度の少なくとも一つについてフィードフォワード制御を行う制御部を備えていることを特徴とする可変分光素子。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010078214A JP5363394B2 (ja) | 2010-03-30 | 2010-03-30 | 可変分光素子 |
| CN201180017455.9A CN102822720B (zh) | 2010-03-30 | 2011-03-15 | 可变分光元件 |
| EP11762564A EP2555038A1 (en) | 2010-03-30 | 2011-03-15 | Variable spectral element |
| PCT/JP2011/055996 WO2011122324A1 (ja) | 2010-03-30 | 2011-03-15 | 可変分光素子 |
| US13/617,939 US8422020B2 (en) | 2010-03-30 | 2012-09-14 | Variable spectral element |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010078214A JP5363394B2 (ja) | 2010-03-30 | 2010-03-30 | 可変分光素子 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011209575A JP2011209575A (ja) | 2011-10-20 |
| JP2011209575A5 JP2011209575A5 (ja) | 2013-05-16 |
| JP5363394B2 true JP5363394B2 (ja) | 2013-12-11 |
Family
ID=44712045
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010078214A Expired - Fee Related JP5363394B2 (ja) | 2010-03-30 | 2010-03-30 | 可変分光素子 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8422020B2 (ja) |
| EP (1) | EP2555038A1 (ja) |
| JP (1) | JP5363394B2 (ja) |
| CN (1) | CN102822720B (ja) |
| WO (1) | WO2011122324A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5363393B2 (ja) * | 2010-03-30 | 2013-12-11 | オリンパス株式会社 | 可変分光素子 |
| JP5363394B2 (ja) | 2010-03-30 | 2013-12-11 | オリンパス株式会社 | 可変分光素子 |
| JP5530375B2 (ja) * | 2011-02-01 | 2014-06-25 | オリンパス株式会社 | 可変分光素子 |
| JP2015141209A (ja) * | 2014-01-27 | 2015-08-03 | セイコーエプソン株式会社 | アクチュエーター制御装置、光学モジュール、及び電子機器 |
| US9568301B2 (en) * | 2014-04-11 | 2017-02-14 | General Electric Company | Systems and methods for capacitive proximity sensing |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06241899A (ja) * | 1993-01-29 | 1994-09-02 | Shimadzu Corp | エタロン駆動機構 |
| CN2276676Y (zh) * | 1996-05-02 | 1998-03-18 | 华中理工大学 | 一种可变形反射镜 |
| US7068415B2 (en) * | 2002-01-29 | 2006-06-27 | Matsushita Electric Industrial Co., Ltd. | Deformable mirror and optical controller including the deformable mirror |
| CN100405122C (zh) * | 2002-11-06 | 2008-07-23 | 松下电器产业株式会社 | 带有位移检测功能的微执行器 |
| JP3812550B2 (ja) * | 2003-07-07 | 2006-08-23 | セイコーエプソン株式会社 | 波長可変光フィルタ |
| CN100528735C (zh) * | 2004-03-08 | 2009-08-19 | 松下电器产业株式会社 | 微致动器以及具有微致动器的装置 |
| JP4710737B2 (ja) | 2006-06-23 | 2011-06-29 | 日産自動車株式会社 | 車両用ブレーキ装置 |
| JP5085101B2 (ja) * | 2006-11-17 | 2012-11-28 | オリンパス株式会社 | 可変分光素子 |
| JP2008183350A (ja) * | 2007-01-31 | 2008-08-14 | Olympus Corp | 可変分光素子、分光装置および内視鏡システム |
| JP2008197362A (ja) * | 2007-02-13 | 2008-08-28 | Olympus Corp | 可変分光素子 |
| JP5798709B2 (ja) * | 2009-03-04 | 2015-10-21 | セイコーエプソン株式会社 | 光フィルター及びそれを備えた光モジュール |
| JP2010224011A (ja) * | 2009-03-19 | 2010-10-07 | Olympus Corp | エタロン装置及びそれを備えた光学ユニット |
| JP5363393B2 (ja) * | 2010-03-30 | 2013-12-11 | オリンパス株式会社 | 可変分光素子 |
| JP5363394B2 (ja) | 2010-03-30 | 2013-12-11 | オリンパス株式会社 | 可変分光素子 |
-
2010
- 2010-03-30 JP JP2010078214A patent/JP5363394B2/ja not_active Expired - Fee Related
-
2011
- 2011-03-15 CN CN201180017455.9A patent/CN102822720B/zh not_active Expired - Fee Related
- 2011-03-15 EP EP11762564A patent/EP2555038A1/en not_active Withdrawn
- 2011-03-15 WO PCT/JP2011/055996 patent/WO2011122324A1/ja active Application Filing
-
2012
- 2012-09-14 US US13/617,939 patent/US8422020B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20130010285A1 (en) | 2013-01-10 |
| CN102822720A (zh) | 2012-12-12 |
| EP2555038A1 (en) | 2013-02-06 |
| WO2011122324A1 (ja) | 2011-10-06 |
| JP2011209575A (ja) | 2011-10-20 |
| CN102822720B (zh) | 2014-11-26 |
| US8422020B2 (en) | 2013-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5363394B2 (ja) | 可変分光素子 | |
| US8272266B2 (en) | Gyroscopes using surface electrodes | |
| Chen et al. | An asymmetrical inertial piezoelectric rotary actuator with the bias unit | |
| Nastro et al. | Double-actuator position-feedback mechanism for adjustable sensitivity in electrostatic-capacitive MEMS force sensors | |
| CN109085382A (zh) | 一种基于机械超材料的加速度敏感机构及复合灵敏度微机械加速度计 | |
| KR101844813B1 (ko) | 가속도 측정 및 자이로스코피를 위한 광학 기계 센서 | |
| JP5363393B2 (ja) | 可変分光素子 | |
| CN1782678A (zh) | 电子天平 | |
| Gao et al. | A high-resolution MEMS capacitive force sensor with bionic swallow comb arrays for ultralow multiphysics measurement | |
| JP2011209575A5 (ja) | ||
| Schroedter et al. | Microcontroller based closed-loop control of a 2D quasi-static/resonant microscanner with on-chip piezo-resistive sensor feedback | |
| JP5822321B2 (ja) | 回転角加速度測定装置 | |
| JP4135054B2 (ja) | 光干渉計用移動ミラー支持装置 | |
| Schroedter et al. | Real-time closed-loop control for micro mirrors with quasistatic comb drives | |
| Cailliez et al. | Modeling and experimental characterization of an active MEMS based force sensor | |
| Teo et al. | Design optimization for an SOI MOEMS accelerometer | |
| JP6424479B2 (ja) | アクチュエータ及びアクチュエータの制御方法 | |
| JP5530375B2 (ja) | 可変分光素子 | |
| US11340251B2 (en) | Inertial measurement unit calibration stage, method, and applications | |
| Omidbeike | Design, Sensing and Control of Monolithic Nanopositioning Devices | |
| Nazdrowicz et al. | Estimation of Comb Structure Capacitance for MEMS Inertial Sensors | |
| Gao | A high resolution capacitive MEMS force sensor with novel bionic swallow comb arrays for multiphysics measurement | |
| Arcila | High resolution Fabry-Pérot interferometer–dynamic system modeling and nanopositioning control system design. | |
| Molina Arcila | High resolution Fabry-Pérot interferometer-dynamic system modeling and nanopositioning control system design. | |
| JP2019521863A (ja) | 微小機械素子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130227 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130312 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130327 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130905 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5363394 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |