JP5328187B2 - 羽根駆動装置および撮像装置 - Google Patents
羽根駆動装置および撮像装置 Download PDFInfo
- Publication number
- JP5328187B2 JP5328187B2 JP2008075757A JP2008075757A JP5328187B2 JP 5328187 B2 JP5328187 B2 JP 5328187B2 JP 2008075757 A JP2008075757 A JP 2008075757A JP 2008075757 A JP2008075757 A JP 2008075757A JP 5328187 B2 JP5328187 B2 JP 5328187B2
- Authority
- JP
- Japan
- Prior art keywords
- blade
- stepping motor
- coil
- signal
- light shielding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Diaphragms For Cameras (AREA)
- Shutters For Cameras (AREA)
Description
本発明の目的は、ステッピングモータを大型化することなく、脱調現象の発生を無くすることのできる羽根駆動装置および撮像装置を提供しようとするものである。
遮光羽根4が、本発明の、光量を規制する羽根部材に相当し、ステッピングモータ1が、本発明の、羽根部材を駆動するステッピングモータに相当する。また、スリット41および位置センサ3や不図示の永久磁石および不図示の磁気式センサが、本発明の、羽根部材の位置を検出する位置検出手段に相当する。また、デコーダ101、コイル駆動部102が、本発明の、位置検出手段の出力信号にしたがって前記ステッピングモータへの通電状態を切り換える駆動制御手段に相当する。また、スリット41や不図示の永久磁石が本発明の信号発生部に相当し、位置センサ3や不図示の磁気式センサが本発明のセンサ部に相当する。また、伝達機構103が、本発明の、ステッピングモータの動力を羽根部材に伝達し、羽根部材を回転させる伝達機構に相当する。
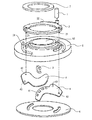
1a 第1のコイル
1b 第2のコイル
2 ロータリープレート
3 位置センサ
4 遮光羽根
5 地板
101 デコーダ
102 コイル駆動部
103 伝達機構
Claims (5)
- 被検出部が形成され、駆動されることで光量を規制する羽根部材と、
第1のコイルおよび第2のコイルを有し、前記羽根部材を駆動するステッピングモータと、
前記羽根部材が駆動されるとき、前記被検出部の有無を検出し、前記ステッピングモータを1ステップ分動かしたときに1パルスの出力信号を出力する検出手段と、
前記出力信号の出力を受けて前記第1のコイルまたは前記第2のコイルの通電方向を切り換える駆動制御手段と、を備えることを特徴とする羽根駆動装置。 - 前記羽根部材には、前記被検出部としてスリットが複数形成され、
前記検出手段は、前記スリットの有無を光学的に検出する光学センサを含むことを特徴とする請求項1に記載の羽根駆動装置。 - 前記羽根部材には、前記被検出部としてN極とS極が交互に着磁され、
前記検出手段は、前記N極または前記S極を磁気的に検出する磁気センサを含むことを特徴とする請求項1に記載の羽根駆動装置。 - 前記被検出部は、前記ステッピングモータの進角に基づいて形成されることを特徴とする請求項1または2に記載の羽根駆動装置。
- 請求項1ないし4のいずれかに記載の羽根駆動装置を具備することを特徴とする撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008075757A JP5328187B2 (ja) | 2008-03-24 | 2008-03-24 | 羽根駆動装置および撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008075757A JP5328187B2 (ja) | 2008-03-24 | 2008-03-24 | 羽根駆動装置および撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009229862A JP2009229862A (ja) | 2009-10-08 |
| JP5328187B2 true JP5328187B2 (ja) | 2013-10-30 |
Family
ID=41245322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008075757A Expired - Fee Related JP5328187B2 (ja) | 2008-03-24 | 2008-03-24 | 羽根駆動装置および撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5328187B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5322501B2 (ja) * | 2008-05-29 | 2013-10-23 | キヤノン株式会社 | 駆動装置及び電子機器 |
| JP5631673B2 (ja) * | 2010-09-10 | 2014-11-26 | キヤノン株式会社 | 光量調整装置 |
| CN107407854B (zh) | 2015-02-27 | 2020-09-29 | 日本电产科宝株式会社 | 叶片驱动装置 |
| WO2016136932A1 (ja) * | 2015-02-27 | 2016-09-01 | 日本電産コパル株式会社 | 羽根駆動装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07333680A (ja) * | 1994-06-10 | 1995-12-22 | Fuji Photo Film Co Ltd | シャッタ羽根の駆動制御装置 |
-
2008
- 2008-03-24 JP JP2008075757A patent/JP5328187B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009229862A (ja) | 2009-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5419360B2 (ja) | 光学機器 | |
| CN101729010B (zh) | 具有步进电动机的驱动设备 | |
| CN104885348B (zh) | 马达驱动设备 | |
| JP5656354B2 (ja) | 駆動装置 | |
| US6713985B2 (en) | Drive control apparatus for stepping motor | |
| US20190052786A1 (en) | Motor drive device that reduces collision noise of moving member, method of controlling same, and storage medium | |
| CN104038686A (zh) | 摄像装置、电动机驱动装置以及摄像方法 | |
| JP5328187B2 (ja) | 羽根駆動装置および撮像装置 | |
| JP5241184B2 (ja) | モータ | |
| JP2005091496A (ja) | セクタ駆動機構 | |
| JP5322501B2 (ja) | 駆動装置及び電子機器 | |
| JP4261752B2 (ja) | 駆動装置 | |
| JP4181955B2 (ja) | 光量調節装置及びカメラ | |
| JP5665383B2 (ja) | モータ制御装置及び制御方法 | |
| JP2012078690A (ja) | 光量調節装置 | |
| JP2019071028A (ja) | モータ制御装置、モータ制御方法、及び撮像装置 | |
| JP5464987B2 (ja) | モータ駆動装置 | |
| JP5828678B2 (ja) | モータ制御装置およびモータ駆動装置 | |
| JP5631023B2 (ja) | 撮像装置 | |
| JP5511445B2 (ja) | モータ及びモータの駆動制御方法 | |
| JP2015033191A (ja) | モータ制御装置 | |
| JP6135927B2 (ja) | ステッピングモータの駆動装置、駆動システム、及び駆動方法、及びそれを有するレンズユニット、カメラ | |
| JP5159287B2 (ja) | 像振れ補正装置、撮像装置および像振れ補正装置の制御方法 | |
| JP2002136189A (ja) | ステップモータの駆動装置とレンズ移動装置 | |
| JP4676337B2 (ja) | セクタ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100520 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130723 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5328187 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |