JP5259052B2 - 電気駆動車両用のブレーキ制御システム - Google Patents
電気駆動車両用のブレーキ制御システム Download PDFInfo
- Publication number
- JP5259052B2 JP5259052B2 JP2005177735A JP2005177735A JP5259052B2 JP 5259052 B2 JP5259052 B2 JP 5259052B2 JP 2005177735 A JP2005177735 A JP 2005177735A JP 2005177735 A JP2005177735 A JP 2005177735A JP 5259052 B2 JP5259052 B2 JP 5259052B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- brake
- control
- torque
- operating parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 claims description 11
- 238000012937 correction Methods 0.000 claims description 6
- 230000005540 biological transmission Effects 0.000 description 25
- 238000010586 diagram Methods 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000008929 regeneration Effects 0.000 description 2
- 238000011069 regeneration method Methods 0.000 description 2
- 244000145845 chattering Species 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/18—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/02—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels
- B60T1/06—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels
- B60T1/062—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels acting on transmission parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/58—Combined or convertible systems
- B60T13/585—Combined or convertible systems comprising friction brakes and retarders
- B60T13/586—Combined or convertible systems comprising friction brakes and retarders the retarders being of the electric type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/411—Bulldozers, Graders
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Regulating Braking Force (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Description
Tc(s)−Tbm(s)/Nmb=(Jms+cm)ωm(s)
Tb(s)+Tbm(s)=k/sNbs[ωm(s)/Ntr−ωs(s)]
−Tl(s)=(Jvs+cs)ωs(s)+k/s[ωs(s)−ωm(s)/Ntr]
さらに、
ωm(s)={Ntr 2(Jvs2+css+k)[Tb(s)/Nmb+Tc(s)]−kNtrTl(s)}/{JmNtr 2Jvs3+Ntr 2(Jmcs+Jvcm)s2+(kJmNtr 2+kJv+Ntr 2cmcs)s+k(cs+Ntr 2cm)2}
P(s)=Ntr 2(Jvs2+css+k)/{JmNtr 2Jvs3+Ntr 2(Jmcs+Jvcm)s2+(kJmNtr 2+kJv+Ntr 2cmcs)s+k(cs+Ntr 2cm)2}
D(s)=k/[Ntr(Jvs2+css+k)]
ωd’=kwWl/Pb、Pbωm≧kwWlである場合、ここで、kwは、ブレーキモータ伝達比および他のパラメータと関係する定数である。一実施形態において、制御システムのチャタリングを防止するためにローパスフィルタまたは境界制御を付加することが可能である。
δωd=0、Pbωm<kwWlである場合
δωd=kbpp(kwWl−Pbωm)+I(kwWl−Pbωm)dt、Pbωm≧kwWlである場合。
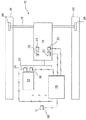
12 電動モータ
14 トランスミッションユニット
16 駆動伝達系
18 制御ユニット
20 ギヤ減速ユニット
22 ブレーキ
23 圧力制御弁
24 スプロケット
26 駆動履帯
28 操作者入力ユニット
29 モータトルクセンサ
30 モータ速度センサ
32 モータ制御器
34 ブレーキ制御器
36 ブレーキパワー制御器
37 修正器
38 モータトルク−電流変換器
39 修正器
40 トランスミッション上部
41 修正器
42 トランスミッション下部
44 増倍器
46 修正器
Claims (6)
- モータとブレーキとを有する車両の制動を制御するための方法であって、
モータの実際の動作パラメータを感知するステップと、
モータの所望の動作パラメータを受信するステップと、
モータの実際の動作パラメータと所望の動作パラメータとに基づきモータを制御するステップと、
モータの実際の動作パラメータと所望の動作パラメータとモータ制御部からの出力とに基づきブレーキを制御するステップとを含み、
モータの実際の動作パラメータがモータ速度であり、モータの所望の動作パラメータが所望のモータ速度であり、
ブレーキパワーのフィードバック値とブレーキパワー限度とを比較して、比較に基づきブレーキパワーがブレーキパワー限度内となるように所望のモータ速度を修正するステップをさらに含む方法。 - モータ速度とモータトルクとを感知することによってモータの動作モードを決定するステップと、モータトルクがモータのトルク限界を越えているかどうかを決定するステップとをさらに含み、決定されたモータの動作モードが減速モードである場合およびモータトルクがモータのトルク限界を越えている場合、モータおよびブレーキが制御される、請求項1に記載の方法。
- モータが、モータ制御トルクを決定することによって制御され、ブレーキが、ブレーキ制御トルクを決定することによって制御され、モータおよびブレーキが閉ループで制御される、請求項1に記載の方法。
- モータとブレーキとを有する車両の制動を制御するためのシステムであって、
モータ動作パラメータセンサと、
操作者入力ユニットと、
モータ動作パラメータセンサと操作者入力ユニットとに結合された制御ユニットとを備え、制御ユニットが、
モータ制御出力を決定して、モータ動作パラメータセンサおよび操作者入力ユニットからの信号に基づきモータを制御するように構成されたモータ制御器と、
モータ制御器と、モータ動作パラメータセンサと、操作者入力ユニットとに結合されたブレーキ制御器であって、ブレーキ制御出力を決定して、モータ動作パラメータセンサ、操作者入力ユニットおよびモータ制御出力からの信号に基づきブレーキを制御するように構成されるブレーキ制御器とを含み、
モータ制御出力がモータ制御トルクであり、ブレーキ制御出力がブレーキ制御トルクであり、
ブレーキパワー制御器をさらに含み、ブレーキパワー制御器が、操作者入力ユニットからの所望のモータ速度の信号を修正するために、ブレーキ制御出力のフィードバック値とブレーキパワー限度との比較に基づき、ブレーキパワーがブレーキパワー限度内となるように修正信号を提供するように構成されるシステム。 - 動作パラメータセンサがモータ速度を感知し、操作者入力ユニットが所望のモータ速度を提供する、請求項4に記載のシステム。
- 制御ユニットが、モータがモータ速度とモータトルクとに基づく減速モードにあるかどうか、かつモータトルクがモータのトルク限界を越えているかどうかを決定し、またモータが減速モードにある場合およびモータトルクがモータのトルク限界を越えている場合、モータおよびブレーキが制御される、請求項4に記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/869,067 US7493205B2 (en) | 2004-06-17 | 2004-06-17 | Brake control system for an electric drive vehicle |
| US10/869,067 | 2004-06-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006001543A JP2006001543A (ja) | 2006-01-05 |
| JP5259052B2 true JP5259052B2 (ja) | 2013-08-07 |
Family
ID=35481702
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005177735A Expired - Fee Related JP5259052B2 (ja) | 2004-06-17 | 2005-06-17 | 電気駆動車両用のブレーキ制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7493205B2 (ja) |
| JP (1) | JP5259052B2 (ja) |
| DE (1) | DE102005019824A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006024239A1 (de) * | 2006-05-23 | 2007-11-29 | Siemens Ag | Verfahren zur Bremsung von elektrisch angetriebenen Fahrzeugen |
| US20070284170A1 (en) * | 2006-06-13 | 2007-12-13 | Kuras Brian D | Retarding control for hydromechanical drive machine |
| US8935009B2 (en) | 2011-05-06 | 2015-01-13 | Caterpillar Inc. | Method and apparatus for controlling multiple variable displacement hydraulic pumps |
| US8911216B2 (en) | 2011-05-06 | 2014-12-16 | Caterpillar Inc. | Method, apparatus, and computer-readable storage medium for controlling torque load of multiple variable displacement hydraulic pumps |
| US9676280B2 (en) * | 2015-06-09 | 2017-06-13 | Caterpillar Inc. | Braking management in a dual braking system |
| DE102018203206A1 (de) * | 2018-03-05 | 2019-09-05 | Zf Friedrichshafen Ag | Schaltverfahren für ein elektrisches Antriebssystem |
| US12180672B2 (en) | 2020-03-02 | 2024-12-31 | Doosan Bobcat North America, Inc. | Electrically powered power machine |
| CA3220521A1 (en) | 2021-09-02 | 2023-03-09 | Brent DURKIN | Lift arm arrangements for power machines |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57930A (en) * | 1980-06-04 | 1982-01-06 | Komatsu Ltd | Automatic controller for retarder braking |
| JP3160268B2 (ja) * | 1999-07-13 | 2001-04-25 | 川崎重工業株式会社 | 鉄道用低速作業車両等の簡易ブレーキシステム |
| JP3659146B2 (ja) * | 2000-08-31 | 2005-06-15 | 日産自動車株式会社 | 制動制御装置 |
| US6551212B2 (en) | 2001-02-16 | 2003-04-22 | Caterpillar Inc | Decelerator system for a work machine |
| JP3802356B2 (ja) * | 2001-02-28 | 2006-07-26 | 松下電工株式会社 | 電動車の走行制御装置 |
| JP3966035B2 (ja) * | 2001-09-27 | 2007-08-29 | 日産自動車株式会社 | 制動制御装置 |
| JP3932979B2 (ja) * | 2002-05-27 | 2007-06-20 | 日産自動車株式会社 | 車速制御装置 |
| JP2004058902A (ja) * | 2002-07-30 | 2004-02-26 | Nissan Motor Co Ltd | 制動制御装置 |
| JP2004268901A (ja) * | 2003-02-18 | 2004-09-30 | Nissan Motor Co Ltd | 制動制御装置 |
| US6986727B2 (en) | 2003-12-23 | 2006-01-17 | Caterpillar Inc. | Retarding control for an electric drive machine |
-
2004
- 2004-06-17 US US10/869,067 patent/US7493205B2/en active Active
-
2005
- 2005-04-28 DE DE102005019824A patent/DE102005019824A1/de not_active Withdrawn
- 2005-06-17 JP JP2005177735A patent/JP5259052B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20050283299A1 (en) | 2005-12-22 |
| US7493205B2 (en) | 2009-02-17 |
| JP2006001543A (ja) | 2006-01-05 |
| DE102005019824A1 (de) | 2006-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102131684B (zh) | 用于对静液压驱动机械进行制动的控制系统和方法 | |
| KR101524323B1 (ko) | 차량 클러치의 슬립을 제어하기 위한 방법 및 장치 | |
| JP4675036B2 (ja) | 車両用摩擦回生複合制動システム及びその方法 | |
| JP5790782B2 (ja) | 車両の制御装置 | |
| KR101234645B1 (ko) | 드라이브 샤프트 보호장치 및 방법 | |
| CN110382318B (zh) | 车辆的动力传动系以及用于操控车辆动力传动系的方法 | |
| JP4434212B2 (ja) | 車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体 | |
| JP7207004B2 (ja) | 電動車両の制御装置 | |
| JP5259052B2 (ja) | 電気駆動車両用のブレーキ制御システム | |
| KR20220088455A (ko) | 차량 제어 장치, 차량 제어 방법 및 차량 제어 시스템 | |
| WO2002094602A1 (en) | A method for reversing the driving direction | |
| CN111942170B (zh) | 车辆蠕行控制装置以及车辆蠕行控制方法 | |
| CN111086394B (zh) | 至少暂时电驱动的车辆的制动系统、机动车和制动控制方法 | |
| JP2000145924A (ja) | 油圧機械式駆動システムに関連したエンジンの負の負荷を制御するための装置及び方法 | |
| JP2020199814A (ja) | 車両の制動制御装置 | |
| US20220153243A1 (en) | Estimation of the temperature of an electric motor of a vehicle brake actuator and control of the motor | |
| JP2014204538A (ja) | 電動車両の制御装置 | |
| US11453389B2 (en) | Vehicle equipped with electric motor and parking control method therefor | |
| CN103109063B (zh) | 车辆的发电控制装置及发电控制方法 | |
| JP2008195379A (ja) | ブレーキ応答性の車両電気駆動装置 | |
| JP5251319B2 (ja) | 電動ブレーキ装置 | |
| JP4581308B2 (ja) | 電気自動車の制御装置 | |
| US20220258618A1 (en) | Braking control device | |
| JP5990337B2 (ja) | 作業機械のためのギヤボックス及びギヤボックスを制御する方法 | |
| JP7058047B2 (ja) | 車両制動装置および車両制動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080616 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20081010 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110722 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20111019 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20111024 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120518 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120820 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120823 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |