JP5228366B2 - 走行情報収集システムおよび走行情報の学習方法 - Google Patents
走行情報収集システムおよび走行情報の学習方法 Download PDFInfo
- Publication number
- JP5228366B2 JP5228366B2 JP2007115572A JP2007115572A JP5228366B2 JP 5228366 B2 JP5228366 B2 JP 5228366B2 JP 2007115572 A JP2007115572 A JP 2007115572A JP 2007115572 A JP2007115572 A JP 2007115572A JP 5228366 B2 JP5228366 B2 JP 5228366B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- travel information
- travel
- collected
- traffic flow
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
Description
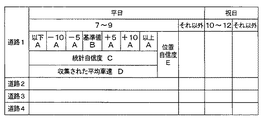
本実施形態における統計自信度は0〜100で表され、この数値が小さいほど走行情報のばらつきが大きいことを意味する。例えば、統計自信度を100として特定した場合、学習データベースの統計自信度の格納部に100を記憶する。
12…方位センサ、13…車速センサ、14…地図データ取得部、15…制御部、
15a…位置標定部、15b…学習制御部、15c…記憶媒体、
15d…目的地設定部、15e…走行支援部、15f…通信制御部、
20…ライト制御部、21…ハイブリッド制御部、22…車速制御部。
Claims (9)
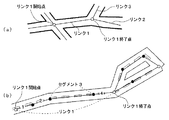
- 車両に搭載され、自車両の現在位置および走行中の道路区画を特定する位置特定手段と、前記自車両の走行に伴って収集した前記道路区画毎の走行情報を記憶媒体に記憶させる記憶制御手段とを備えた走行情報収集装置と、複数のプローブ車と、当該複数のプローブ車の走行に伴って収集された道路区画毎の交通流を表す交通流情報を格納するデータベースを有する情報センタと、を含む走行情報収集システムであって、
前記情報センタは、前記交通流情報を、当該交通流情報の特性に従って複数の時間帯別に分類して前記データベースに格納し、
前記走行情報収集装置は、
前記情報センタから、前記交通流情報を前記交通流情報の特性に従って分類した前記複数の時間帯別の分類構成を表す分類情報を取得し、この分類情報に従って、前記交通流情報を前記複数の時間帯別に分類した学習データベースを構築する学習データベース構築手段を備え、
前記記憶制御手段は、収集した前記走行情報を前記学習データベースの分類に従って学習させることを特徴とする走行情報収集システム。 - 前記走行情報には、車速、電力消費量、燃料消費量、シフトレバー位置情報、アクセル開度情報、エンジン回転数、ブレーキ操作回数、道路勾配、道路屈曲率の少なくとも1つが含まれることを特徴とする請求項1に記載の走行情報収集システム。
- 前記学習データベース構築手段は、更に、前記学習データベースを曜日および祝祭日別に分類することを特徴とする請求項1または2に記載の走行情報収集システム。
- 前記記憶制御手段は、前記走行情報の学習回数を前記記憶媒体に記憶するとともに、収集された前記走行情報と前記記憶媒体に記憶された過去の走行情報とから、前記学習回数に応じた前記走行情報の平均値を求め、その平均値を新たな走行情報として前記学習データベースの分類に従って学習させることを特徴とする請求項1ないし3のいずれか1つに記載の走行情報収集システム。
- 前記走行情報収集装置は、予め定められた基準値と収集された前記走行情報の乖離に応じて、収集された前記走行情報のばらつきの度合いを表す統計自信度を特定し、収集された前記走行情報に前記統計自信度を関連付けて記憶媒体に記憶させる統計自信度記憶手段を備えたことを特徴とする請求項4に記載の走行情報収集システム。
- 前記統計自信度記憶手段は、収集された前記走行情報の統計自信度と前記記憶媒体に記憶された過去の走行情報の統計自信度とから、前記学習回数に応じた統計自信度の平均値を求め、その平均値を新たな統計自信度として前記記憶媒体に記憶させることを特徴とする請求項5に記載の走行情報収集システム。
- 前記走行情報収集装置は、前記自車両の現在位置の精度を表す位置自信度を特定し、収集された前記走行情報に前記位置自信度を関連付けて前記記憶媒体に記憶させる位置自信度記憶手段を備えたことを特徴とする請求項1ないし6のいずれか1つに記載の走行情報収集システム。
- 前記位置自信度記憶手段は、収集された前記走行情報の位置自信度と前記記憶媒体に記憶された過去の走行情報の位置自信度とから、前記学習回数に応じた位置自信度の平均値を求め、その平均値を新たな位置自信度として前記記憶媒体に記憶させることを特徴とする請求項7に記載の走行情報収集システム。
- 車両に搭載され、自車両の現在位置および走行中の道路区画を特定し、前記自車両の走行に伴って収集した前記道路区画毎の走行情報を記憶媒体に記憶させる走行情報収集装置の走行情報の学習方法であって、
複数のプローブ車の走行に伴って収集された道路区画毎の交通流を表す交通流情報を、当該交通流情報の特性に従って複数の時間帯別に分類して格納するデータベースを有する情報センタから、前記交通流情報を前記交通流情報の特性に従って分類した前記複数の時間帯別の分類構成を表す分類情報を取得し、この分類情報に従って、前記交通流情報を前記複数の時間帯別に分類した学習データベースを構築し、収集した前記走行情報を前記学習データベースの分類に従って学習させることを特徴とする走行情報収集装置の走行情報の学習方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007115572A JP5228366B2 (ja) | 2007-04-25 | 2007-04-25 | 走行情報収集システムおよび走行情報の学習方法 |
| US12/148,805 US8666593B2 (en) | 1920-04-25 | 2008-04-22 | Travel information collection apparatus |
| DE102008020590.7A DE102008020590B4 (de) | 2007-04-25 | 2008-04-24 | Fahrinformationssammelvorrichtung und Verfahren zum Lernen von Fahrinformation eines Fahrzeugs |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007115572A JP5228366B2 (ja) | 2007-04-25 | 2007-04-25 | 走行情報収集システムおよび走行情報の学習方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008276286A JP2008276286A (ja) | 2008-11-13 |
| JP5228366B2 true JP5228366B2 (ja) | 2013-07-03 |
Family
ID=39777801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007115572A Active JP5228366B2 (ja) | 1920-04-25 | 2007-04-25 | 走行情報収集システムおよび走行情報の学習方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8666593B2 (ja) |
| JP (1) | JP5228366B2 (ja) |
| DE (1) | DE102008020590B4 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE49334E1 (en) | 2005-10-04 | 2022-12-13 | Hoffberg Family Trust 2 | Multifactorial optimization system and method |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5045210B2 (ja) * | 2007-04-25 | 2012-10-10 | 株式会社デンソー | 走行情報収集装置 |
| WO2010128998A1 (en) * | 2009-05-04 | 2010-11-11 | Tele Atlas North America Inc. | Navigation device & method |
| DE102009036673A1 (de) * | 2009-08-07 | 2011-02-10 | Daimler Ag | Navigationssystem mit Pendlerroutenfunktion und Verfahren zur Unterstützung eines Fahrers eines Fahrzeugs beim Fahren auf einer Pendlerroute |
| JP4955043B2 (ja) * | 2009-10-06 | 2012-06-20 | 本田技研工業株式会社 | 燃費情報管理サーバ、燃費情報管理システムおよび燃費情報管理方法 |
| GB2489655A (en) * | 2010-11-19 | 2012-10-10 | Fmg Support Ltd | Identify traffic incidents using acceleration and location data |
| JP6163309B2 (ja) * | 2013-02-04 | 2017-07-12 | 三菱重工メカトロシステムズ株式会社 | 車両電力消費シミュレーション装置、車両電力消費シミュレーション方法、およびプログラム |
| JP6387636B2 (ja) * | 2014-03-18 | 2018-09-12 | 富士通株式会社 | 抽出方法、推奨方法、情報処理装置及び道路補修工法決定支援プログラム |
| US9511767B1 (en) * | 2015-07-01 | 2016-12-06 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle action planning using behavior prediction |
| WO2018061162A1 (ja) * | 2016-09-29 | 2018-04-05 | 三菱電機株式会社 | 燃費推定システム、燃費推定方法および燃費推定プログラム |
| US11669675B2 (en) | 2016-11-23 | 2023-06-06 | International Business Machines Corporation | Comparing similar applications with redirection to a new web page |
| US10296004B2 (en) | 2017-06-21 | 2019-05-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous operation for an autonomous vehicle objective in a multi-vehicle environment |
| US10571916B2 (en) * | 2017-07-14 | 2020-02-25 | Uatc, Llc | Control method for autonomous vehicles |
| US10235881B2 (en) * | 2017-07-28 | 2019-03-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous operation capability configuration for a vehicle |
| CN110849382A (zh) * | 2018-08-21 | 2020-02-28 | 上海博泰悦臻网络技术服务有限公司 | 驾驶时长预测方法及装置 |
| DE102018221740A1 (de) | 2018-12-14 | 2020-06-18 | Volkswagen Aktiengesellschaft | Verfahren, Vorrichtung und Computerprogramm für ein Fahrzeug |
| CN112735124B (zh) * | 2020-12-16 | 2022-05-20 | 阿波罗智联(北京)科技有限公司 | 交通数据的分析方法、装置、设备、车辆及存储介质 |
| KR102464331B1 (ko) * | 2020-12-24 | 2022-11-09 | 한국교통연구원 | 교통 패턴 분류 장치 및 방법 |
| DE102022115448A1 (de) | 2022-06-21 | 2023-12-21 | Schleswig-Holstein Netz AG | Verfahren zur Ermittlung eines Systemzustands eines Verkehrssteuerungssystems |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5792969A (en) * | 1980-12-01 | 1982-06-09 | Ricoh Co Ltd | Inquiry system for facsimile receiving device |
| JPH0322115A (ja) | 1989-06-20 | 1991-01-30 | Omron Corp | 遠隔操作用カードと遠隔制御装置 |
| JP2937571B2 (ja) | 1991-09-03 | 1999-08-23 | マツダ株式会社 | 学習制御自動車 |
| US5521823A (en) | 1991-09-03 | 1996-05-28 | Mazda Motor Corporation | Learning control vehicle |
| JP3056856B2 (ja) * | 1991-12-05 | 2000-06-26 | マツダ株式会社 | 学習制御自動車 |
| JP3022115B2 (ja) | 1993-12-27 | 2000-03-15 | 日産自動車株式会社 | 車載制御システムの制御目標変更装置 |
| JP3496479B2 (ja) | 1997-10-16 | 2004-02-09 | トヨタ自動車株式会社 | 道路データメンテナンスシステム |
| US6480783B1 (en) * | 2000-03-17 | 2002-11-12 | Makor Issues And Rights Ltd. | Real time vehicle guidance and forecasting system under traffic jam conditions |
| KR100353649B1 (ko) * | 2000-08-18 | 2002-09-28 | 삼성전자 주식회사 | 무선망을 이용한 네비게이션 시스템 및 그에 의한 경로안내 방법 |
| US6560532B2 (en) * | 2001-05-25 | 2003-05-06 | Regents Of The University Of California, The | Method and system for electronically determining dynamic traffic information |
| US6577946B2 (en) * | 2001-07-10 | 2003-06-10 | Makor Issues And Rights Ltd. | Traffic information gathering via cellular phone networks for intelligent transportation systems |
| JP4132741B2 (ja) * | 2001-07-25 | 2008-08-13 | アルパイン株式会社 | ナビゲーション装置 |
| JP2003051095A (ja) * | 2001-08-07 | 2003-02-21 | Mazda Motor Corp | 自動車の制御ゲイン変更用サーバ、自動車の制御ゲイン変更方法、及び、自動車の制御ゲイン変更用プログラム |
| EP1422501A1 (en) * | 2001-08-31 | 2004-05-26 | Aisin Aw Co., Ltd. | Information display system |
| JPWO2003040925A1 (ja) * | 2001-10-22 | 2005-03-03 | アイシン・エィ・ダブリュ株式会社 | 情報管理システム、情報管理システム用サーバ及び情報管理システム用情報端末 |
| CN100353142C (zh) * | 2001-10-25 | 2007-12-05 | 爱信艾达株式会社 | 信息显示系统 |
| US20030135304A1 (en) * | 2002-01-11 | 2003-07-17 | Brian Sroub | System and method for managing transportation assets |
| US7565155B2 (en) * | 2002-04-10 | 2009-07-21 | Networks In Motion | Method and system for dynamic estimation and predictive route generation |
| US7499949B2 (en) * | 2002-08-07 | 2009-03-03 | Navteq North America, Llc | Method and system for obtaining recurring delay data using navigation systems |
| JP2004157768A (ja) * | 2002-11-06 | 2004-06-03 | Mitsubishi Electric Corp | 渋滞予測装置及び渋滞状況表示システム及び渋滞予測方法及び渋滞予測プログラム及び渋滞予測プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2004198158A (ja) * | 2002-12-17 | 2004-07-15 | Aisin Aw Co Ltd | 情報表示システム |
| JP4255007B2 (ja) * | 2003-04-11 | 2009-04-15 | 株式会社ザナヴィ・インフォマティクス | ナビゲーション装置、およびその旅行時間算出方法 |
| JP4254627B2 (ja) * | 2003-06-27 | 2009-04-15 | 株式会社デンソー | 車両用駆動力制御システム |
| JP4393222B2 (ja) * | 2004-02-25 | 2010-01-06 | 株式会社日立製作所 | 交通情報表示装置 |
| CN100511320C (zh) | 2004-03-25 | 2009-07-08 | 株式会社日立制作所 | 车载探测终端、数据探测采集系统及相应的方法 |
| US7289039B2 (en) * | 2004-09-10 | 2007-10-30 | Xanavi Informatics Corporation | Apparatus and method for processing and displaying traffic information in an automotive navigation system |
| JP4639720B2 (ja) | 2004-09-22 | 2011-02-23 | 日産自動車株式会社 | 車両用情報提供システム及びそのセンタ |
| WO2006039660A2 (en) * | 2004-10-01 | 2006-04-13 | Networks In Motion, Inc. | Off board navigation solution |
| JP4506440B2 (ja) | 2004-12-02 | 2010-07-21 | アイシン・エィ・ダブリュ株式会社 | データ処理装置、情報表示装置及びデータベース作成方法 |
| JP4728003B2 (ja) * | 2005-01-27 | 2011-07-20 | クラリオン株式会社 | ナビゲーションシステム |
| US7454442B2 (en) * | 2005-04-25 | 2008-11-18 | The Boeing Company | Data fusion for advanced ground transportation system |
| JP4852919B2 (ja) * | 2005-07-25 | 2012-01-11 | アイシン・エィ・ダブリュ株式会社 | 車両乗上制御システム及び車両乗上制御方法 |
| US8874477B2 (en) | 2005-10-04 | 2014-10-28 | Steven Mark Hoffberg | Multifactorial optimization system and method |
| CN1967524B (zh) * | 2005-11-15 | 2010-07-21 | 日电(中国)有限公司 | 路况信息收集和查询系统及其方法 |
| JP2007178126A (ja) * | 2005-12-26 | 2007-07-12 | Aisin Aw Co Ltd | 走行リンク特定システム |
| US8014936B2 (en) * | 2006-03-03 | 2011-09-06 | Inrix, Inc. | Filtering road traffic condition data obtained from mobile data sources |
| US7912628B2 (en) * | 2006-03-03 | 2011-03-22 | Inrix, Inc. | Determining road traffic conditions using data from multiple data sources |
| US7706964B2 (en) * | 2006-06-30 | 2010-04-27 | Microsoft Corporation | Inferring road speeds for context-sensitive routing |
| US7739031B2 (en) * | 2006-09-05 | 2010-06-15 | Nissan Technical Center North America, Inc. | Vehicle on-board unit |
| JP4840069B2 (ja) * | 2006-10-12 | 2011-12-21 | アイシン・エィ・ダブリュ株式会社 | ナビゲーションシステム |
| US7885285B2 (en) * | 2008-09-29 | 2011-02-08 | Toyota Infotechnology Center Co., Ltd. | Probabilistic routing for vehicular ad hoc network |
-
2007
- 2007-04-25 JP JP2007115572A patent/JP5228366B2/ja active Active
-
2008
- 2008-04-22 US US12/148,805 patent/US8666593B2/en not_active Expired - Fee Related
- 2008-04-24 DE DE102008020590.7A patent/DE102008020590B4/de not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE49334E1 (en) | 2005-10-04 | 2022-12-13 | Hoffberg Family Trust 2 | Multifactorial optimization system and method |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102008020590A1 (de) | 2008-10-30 |
| DE102008020590B4 (de) | 2015-05-21 |
| JP2008276286A (ja) | 2008-11-13 |
| US8666593B2 (en) | 2014-03-04 |
| US20080269985A1 (en) | 2008-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5228366B2 (ja) | 走行情報収集システムおよび走行情報の学習方法 | |
| JP5045210B2 (ja) | 走行情報収集装置 | |
| US9631940B2 (en) | Method and system for determining a route for efficient energy consumption | |
| JP4427759B2 (ja) | 車両挙動学習装置及び車両挙動学習プログラム | |
| CN110036424B (zh) | 用于预测未来的速度轨迹的速度信息的存储 | |
| EP2910444B1 (en) | Travel support device, travel support method, and drive support system | |
| JP4910510B2 (ja) | 制御用情報記憶装置及びプログラム | |
| US8694242B2 (en) | Traveling information creating device, traveling information creating method and program | |
| CN101795919B (zh) | 燃料节省驾驶辅助设备 | |
| US8897999B2 (en) | Section setting method, mileage information generation device, and operation assist device | |
| US8547211B2 (en) | Route retrieval apparatus and navigation apparatus | |
| US20090198398A1 (en) | Drive-and-control system for hybrid vehicles | |
| RU2554724C2 (ru) | Способ улучшения обеспечения дорожной информацией | |
| US9857183B2 (en) | Travel support device, travel support method, and drive support system | |
| US20150066270A1 (en) | Movement information processing device, movement information processing method, and driving assistance system | |
| KR20060126554A (ko) | 교통 정보 산출 장치, 교통 정보 산출 방법, 교통 정보표시 방법 및 교통 정보 표시 장치 | |
| JP2000321081A (ja) | 交通ルート網マップの更新方法及び自動車案内情報を生成するためのマップサポートされた方法 | |
| JP7173990B2 (ja) | 追越確率コレクションを生成する方法、自動車の制御装置を動作させる方法、追越確率コレクション装置および制御装置 | |
| CN112714715A (zh) | 用于对车辆进行里程估计的方法和设备 | |
| US9969382B2 (en) | Moving assist apparatus and method and driving assist system | |
| CN100587403C (zh) | 交通信息数据的校正方法以及校正装置 | |
| JP7437331B2 (ja) | データ配信装置、配信システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110426 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111101 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130304 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160329 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5228366 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |