JP5227419B2 - 車両用の安全手段を駆動制御する方法および装置 - Google Patents
車両用の安全手段を駆動制御する方法および装置 Download PDFInfo
- Publication number
- JP5227419B2 JP5227419B2 JP2010537345A JP2010537345A JP5227419B2 JP 5227419 B2 JP5227419 B2 JP 5227419B2 JP 2010537345 A JP2010537345 A JP 2010537345A JP 2010537345 A JP2010537345 A JP 2010537345A JP 5227419 B2 JP5227419 B2 JP 5227419B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- yaw acceleration
- drive control
- sensor
- acceleration signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R21/0133—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by integrating the amplitude of the input signal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R21/01332—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis
- B60R21/01336—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis using filtering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R21/01332—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis
- B60R21/01338—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis using vector analysis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
- B60T8/17551—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve determining control parameters related to vehicle stability used in the regulation, e.g. by calculations involving measured or detected parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R2021/0002—Type of accident
- B60R2021/0004—Frontal collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R2021/0002—Type of accident
- B60R2021/0006—Lateral collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R2021/0002—Type of accident
- B60R2021/0018—Roll-over
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R2021/0104—Communication circuits for data transmission
- B60R2021/01047—Architecture
- B60R2021/01054—Bus
- B60R2021/01068—Bus between different sensors and airbag control unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R2021/01122—Prevention of malfunction
- B60R2021/01184—Fault detection or diagnostic circuits
- B60R2021/0119—Plausibility check
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R2021/01204—Actuation parameters of safety arrangents
- B60R2021/01252—Devices other than bags
- B60R2021/01259—Brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R2021/01327—Angular velocity or angular acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/024—Collision mitigation systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
Description
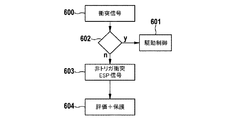
本発明は、車両用の安全手段を駆動制御するための方法ないしは相応の装置に関する。
独立請求項の特徴部分に記載されている構成を有する、車両用安全手段を駆動制御するための本発明の方法ないし本発明の装置は、これらの従来技術に対して、次のような利点を有している。すなわち、主に、ヨー加速度が、安全手段に対する駆動制御信号を形成するために使用される、という利点を有している。ヨー加速度は、例えばヨーレートに比べて、ヨーレートが含むことのできない、驚くほど多くの情報を示す。このような付加的な情報によって、殊に連続衝突の衝突シーンにおいて、効果的な保護が得られる。ここで例えばこのような場合には、次のことが考慮されるべきである。すなわち、乗員保護手段のトリガが必要ないほど弱い衝突である第1の非トリガ衝突が存在しているのだが、生じ得る危険な連続衝突を生起させ得る、高軸(Hochachse)を中心としたモーメントが誘導している、ということが考慮されるべきである。これは、ヨー加速度の評価によって効果的に実現される。
Claims (11)
- 車両(FZ)用の安全手段(PS;ABS,ESP,LW)を駆動制御するための方法であって、
・センサ装置(ESP−S)によって、少なくとも1つのヨー加速度信号
を形成するステップと、
・当該少なくとも1つのヨー加速度信号
を10msよりも短いスキャン時間でスキャンするステップと、
・駆動制御信号を、前記少なくとも1つのヨー加速度信号
に依存して形成するステップとを有しており、
前記少なくとも1つのヨー加速度信号
が最小分散方法によって定められるように、少なくとも1つのヨー加速度信号
を形成する、
ことを特徴とする、方法。 - 前記少なくとも1つのヨー加速度信号の形成において、最小二乗評価機器が使用されることを特徴とする、請求項1記載の方法。
- 前記少なくとも1つのヨー加速度信号
から導出された信号を少なくとも三次元のベクトル(VA)内に供給し、前記駆動制御信号を、当該三次元ベクトル(VA)のクラス分けに依存して形成する、請求項1記載の方法。 - 前記駆動制御信号を出力するために、データの送信および受信をする通信インタフェース(IF3)を設ける、請求項1記載の方法。
- 前記駆動制御信号を、妥当性検査部または閾値制御部としての駆動制御アルゴリズム(800)によって使用する、請求項1記載の方法。
- 前記少なくとも1つのヨー加速度信号
および少なくとも1つの別のセンサ信号に依存して非トリガ衝突を識別および評価し、前記安全手段(PA,ABS,ESP,LW)を前記駆動制御信号に依存して、少なくとも1つの連続衝突からの保護が実現されるように駆動制御する、請求項1から5までのいずれか1項記載の方法。 - 前記少なくとも1つの別のセンサ信号としてヨー角(αz)を使用する、請求項6記載の方法。
- 前記駆動制御信号に依存して、前記別のセンサ信号の少なくとも1つを評価する、請求項1から7までのいずれか1項記載の方法。
- 車両(FZ)用の安全手段(PS,ABS,ESP,LW)を駆動制御するための装置であって、
・少なくとも1つのヨー加速度信号
を形成するセンサ装置(ESP−S)と、
・当該少なくとも1つのヨー加速度信号
を10msよりも短いスキャン時間でスキャンし、前記少なくとも1つのヨー加速度信号
に依存して駆動制御信号を生成する評価回路(μC)とを有しており、
前記少なくとも1つのヨー加速度信号
が最小分散方法によって定められるように、少なくとも1つのヨー加速度信号
を形成する、
ことを特徴とする、装置。 - 前記少なくとも1つのヨー加速度信号を形成する最小二乗評価機器をさらに有することを特徴とする、請求項9記載の装置。
- 前記センサ装置(EPS−S)は、前記評価回路(μC)を備えた制御機器(ABSG)内に組み込まれている、請求項9または10記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007059414.5 | 2007-12-10 | ||
| DE102007059414A DE102007059414A1 (de) | 2007-12-10 | 2007-12-10 | Verfahren und Anordnung zur Ansteuerung von Sicherheitsmitteln für ein Fahrzeug |
| PCT/EP2008/064331 WO2009074391A1 (de) | 2007-12-10 | 2008-10-23 | Verfahren und anordnung zur ansteuerung von sicherheitsmitteln für ein fahrzeug |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011506170A JP2011506170A (ja) | 2011-03-03 |
| JP5227419B2 true JP5227419B2 (ja) | 2013-07-03 |
Family
ID=40377590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010537345A Expired - Fee Related JP5227419B2 (ja) | 2007-12-10 | 2008-10-23 | 車両用の安全手段を駆動制御する方法および装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US20100292887A1 (ja) |
| EP (1) | EP2229293B1 (ja) |
| JP (1) | JP5227419B2 (ja) |
| KR (1) | KR20100095578A (ja) |
| CN (1) | CN101888941B (ja) |
| DE (1) | DE102007059414A1 (ja) |
| ES (1) | ES2390634T3 (ja) |
| RU (1) | RU2010128007A (ja) |
| WO (1) | WO2009074391A1 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008040713B4 (de) * | 2008-07-25 | 2018-10-25 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Betätigung eines aktiven und/oder passiven Sicherheitssystems in einem Kraftfahrzeug |
| DE102008039957A1 (de) | 2008-08-27 | 2010-03-04 | Continental Automotive Gmbh | Verfahren zur Ermittlung eines Unfallschwerekriteriums mittels eines Beschleunigungssignals und eines Körperschallsignals |
| DE102009046067A1 (de) * | 2009-10-28 | 2011-05-05 | Robert Bosch Gmbh | Verfahren und Steuergerät zur Erkennung eines sicherheitskritischen Aufpralls eines Objektes auf ein Fahrzeug |
| DE102010017659A1 (de) * | 2010-06-30 | 2012-01-05 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zur Bereitstellung von Bremsunterstützung in einem Kraftfahrzeug nach einer Erstkollision |
| DE102010039296B4 (de) * | 2010-08-13 | 2020-06-10 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Erzeugung eines Steuersignals |
| IT1402544B1 (it) * | 2010-10-29 | 2013-09-13 | Dainese Spa | Apparecchi, sistema e procedimento per la protezione personale |
| IT1402545B1 (it) | 2010-10-29 | 2013-09-13 | Cefriel Società Consortile A Responsabilità Limitata | Apparecchi, sistema e procedimento per rilevare incidenti |
| DE102010062210A1 (de) * | 2010-11-30 | 2012-05-31 | Robert Bosch Gmbh | Kombiniertes ABS/Airbag-Steuergerät |
| KR102055020B1 (ko) * | 2011-03-02 | 2020-01-22 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 지능형 차량 센서 디바이스 |
| GB2489910B (en) * | 2011-03-29 | 2013-11-27 | Jaguar Cars | Control of active devices during cornering |
| CN102259661A (zh) * | 2011-05-23 | 2011-11-30 | 奇瑞汽车股份有限公司 | 汽车侧滑方向校正控制系统及其控制方法 |
| DE102011080511A1 (de) * | 2011-08-05 | 2013-02-07 | Robert Bosch Gmbh | Schaltungsanordnung und Verfahren zur Plausibilisierung von Sensorsignalen |
| EP2928730B1 (en) * | 2012-12-06 | 2018-11-28 | TRW Automotive U.S. LLC | Method and apparatus for controlling an actuatable restraining device using multi-region enchanced discrimination |
| JP6183257B2 (ja) * | 2014-03-19 | 2017-08-23 | トヨタ自動車株式会社 | 車両運動状態決定装置及び車両運動制御装置 |
| JP6201928B2 (ja) * | 2014-08-04 | 2017-09-27 | トヨタ自動車株式会社 | 車両制御装置 |
| DE102015111154A1 (de) * | 2015-07-30 | 2017-02-02 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren und System zur Verminderung von Folgen einer Kollision |
| DE102016203177A1 (de) * | 2016-02-29 | 2017-08-31 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Verifizieren einer Auslöseentscheidung zum Auslösen einer Sicherheitseinrichtung für ein Fahrzeug, Verfahren und Vorrichtung zum Auslösen einer Sicherheitseinrichtung für ein Fahrzeug, Sensoreinrichtung für ein Fahrzeug und Sicherheitssystem für ein Fahrzeug |
| CN106364443B (zh) * | 2016-08-31 | 2019-03-12 | 杭州好好开车科技有限公司 | 一种基于汽车智能终端数据实时检测碰撞行为的方法 |
| DE102017202534A1 (de) * | 2017-02-16 | 2018-08-16 | Robert Bosch Gmbh | Verfahren zur Aktivierung von mindestens einer Sekundärfunktion eines Insassenschutzsystems eines Fahrzeugs |
| US11648900B2 (en) * | 2020-07-27 | 2023-05-16 | Robert Bosch Gmbh | Off-zone crash detection using lateral accelerations at different positions in a vehicle |
| DE102021130478A1 (de) * | 2021-11-22 | 2023-05-25 | Man Truck & Bus Se | Verfahren zur Erkennung einer Unfallsituation eines Nutzfahrzeugs |
| DE102022208013A1 (de) * | 2022-08-03 | 2024-02-08 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betreiben einer inertialen Messeinheit, inertiale Messeinheit und Steuersystem für ein Fahrzeug |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1137872A (ja) * | 1997-07-24 | 1999-02-12 | Aisin Seiki Co Ltd | タイヤトルク計測装置およびアンチスキッド制御装置 |
| DE10029061C2 (de) * | 2000-06-13 | 2003-12-11 | Breed Automotive Tech | Rückhaltevorrichtung |
| DE10061040A1 (de) | 2000-12-08 | 2002-06-13 | Daimler Chrysler Ag | Verfahren zur Ansteuerung eines reversiblen Gurtstraffers |
| DE10149112B4 (de) | 2001-10-05 | 2004-11-25 | Robert Bosch Gmbh | Verfahren zur Bestimmung einer Auslöseentscheidung für Rückhaltemittel in einem Fahrzeug |
| DE10317640A1 (de) | 2003-04-17 | 2004-11-04 | Robert Bosch Gmbh | Vorrichtung zur Ansteuerung von Rückhaltemitteln |
| EP1625039B1 (de) * | 2003-05-08 | 2008-10-01 | Continental Teves AG & Co. oHG | Verfahren und vorrichtung zum regeln der fahrdynamik eines fahrzeugs |
| DE10344613A1 (de) * | 2003-09-25 | 2005-05-04 | Bosch Gmbh Robert | Verfahren zur Bildung einer Auslöseentscheidung |
| US20050107933A1 (en) * | 2003-11-17 | 2005-05-19 | Fujitsu Ten Limited | Airbag apparatus |
| DE10360666A1 (de) * | 2003-12-23 | 2005-07-28 | Robert Bosch Gmbh | Vorrichtung zur koordinierten Steuerung wenigstens des Antriebs- und des Bremssystems eines Kraftfahrzeugs |
| DE102004004491A1 (de) | 2004-01-29 | 2005-08-18 | Robert Bosch Gmbh | Vorrichtung zur Bestimmung einer Drehgeschwindigkeit |
| US7409290B2 (en) * | 2004-04-17 | 2008-08-05 | American Gnc Corporation | Positioning and navigation method and system thereof |
| DE102004021174A1 (de) | 2004-04-30 | 2005-11-24 | Daimlerchrysler Ag | Verfahren zum Steuern einer sicherheitsrelevanten Komponente eines Kraftfahrzeugs und Kraftfahrzeug mit einem präventiv auslösenden Sicherheitssystem |
| DE102004042959A1 (de) * | 2004-09-02 | 2006-03-09 | Robert Bosch Gmbh | Passagierschutzeinrichtung in einem Fahrzeug |
| JP4387287B2 (ja) | 2004-11-05 | 2009-12-16 | 三菱電機株式会社 | 車両の事故解析装置 |
| WO2007044744A2 (en) * | 2005-10-11 | 2007-04-19 | Ford Global Technologies, Llc. | Enhanced yaw stability control to mitigate a vehicle's abnormal yaw motion due to a disturbance force applied to vehicle body |
-
2007
- 2007-12-10 DE DE102007059414A patent/DE102007059414A1/de not_active Withdrawn
-
2008
- 2008-10-23 JP JP2010537345A patent/JP5227419B2/ja not_active Expired - Fee Related
- 2008-10-23 ES ES08860273T patent/ES2390634T3/es active Active
- 2008-10-23 WO PCT/EP2008/064331 patent/WO2009074391A1/de active Application Filing
- 2008-10-23 EP EP08860273A patent/EP2229293B1/de not_active Not-in-force
- 2008-10-23 RU RU2010128007/11A patent/RU2010128007A/ru not_active Application Discontinuation
- 2008-10-23 KR KR1020107012658A patent/KR20100095578A/ko not_active Application Discontinuation
- 2008-10-23 US US12/734,768 patent/US20100292887A1/en not_active Abandoned
- 2008-10-23 CN CN2008801198205A patent/CN101888941B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101888941B (zh) | 2013-03-27 |
| CN101888941A (zh) | 2010-11-17 |
| RU2010128007A (ru) | 2012-01-20 |
| ES2390634T3 (es) | 2012-11-14 |
| JP2011506170A (ja) | 2011-03-03 |
| EP2229293B1 (de) | 2012-09-12 |
| WO2009074391A1 (de) | 2009-06-18 |
| DE102007059414A1 (de) | 2009-06-18 |
| US20100292887A1 (en) | 2010-11-18 |
| KR20100095578A (ko) | 2010-08-31 |
| EP2229293A1 (de) | 2010-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5227419B2 (ja) | 車両用の安全手段を駆動制御する方法および装置 | |
| US9387819B2 (en) | Method and device for controlling a seat belt device, which is connected to a seat belt, of a vehicle with a predictive collision detection unit | |
| JP4072059B2 (ja) | 自動車における乗員拘束手段のトリガのための方法 | |
| US7908059B2 (en) | Motor vehicle having a preventive action protection system | |
| US10759369B2 (en) | Apparatus and method for controlling vehicular active seatbelt | |
| US7912609B2 (en) | Motor vehicle comprising a preventive protective system | |
| US20070131468A1 (en) | Motor vehicle provided with a pre-safe system | |
| EP2048039A2 (en) | Post impact safety system with vehicle contact information. | |
| US20090038873A1 (en) | Method And Device For Controlling Automatic Emergency Braking | |
| US7706946B2 (en) | Safety system for vehicle occupants | |
| US8275519B2 (en) | Motor vehicle having a preventatively acting safety system | |
| US7422086B2 (en) | Vehicle impact sensor using both accelerometer and pressure sensing for side impact detection | |
| US20120259515A1 (en) | Method for activating and/or controlling at least one reversible restraining device | |
| JP2002337639A (ja) | 乗員保護装置を活性化する方法 | |
| US8244437B2 (en) | Method and system for restraint deployment using lateral kinetic energy | |
| JP4448846B2 (ja) | 乗員拘束システムのためのトリガ決定の形成のための方法 | |
| JP5185396B2 (ja) | 車両安全システム | |
| CN113386698A (zh) | 实施集成的主动-被动正面撞击控制算法的车辆安全系统 | |
| US11912306B2 (en) | Low impact detection for automated driving vehicles | |
| US20190100177A1 (en) | Method for changing a forward displacement of an occupant of a vehicle during braking of the vehicle and control unit | |
| KR20210003343A (ko) | 차량의 안전 장비 제어 장치 및 방법 | |
| US20240140344A1 (en) | System and method for estimating occupant movement in response to automatic emergency braking | |
| JP2017207829A (ja) | 車両情報記録装置及び車両情報記録方法 | |
| JP2024508297A (ja) | 自動緊急ブレーキに応答して乗員の動きを推定するためのシステムおよび方法 | |
| KR20220139065A (ko) | 차량 제어 시스템 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120711 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121011 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121018 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130315 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160322 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |