JP5225523B2 - セル検出機構 - Google Patents
セル検出機構 Download PDFInfo
- Publication number
- JP5225523B2 JP5225523B2 JP2001031486A JP2001031486A JP5225523B2 JP 5225523 B2 JP5225523 B2 JP 5225523B2 JP 2001031486 A JP2001031486 A JP 2001031486A JP 2001031486 A JP2001031486 A JP 2001031486A JP 5225523 B2 JP5225523 B2 JP 5225523B2
- Authority
- JP
- Japan
- Prior art keywords
- claw
- cassette
- path
- detection mechanism
- claw portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/26—Accessories or devices or components used for biocidal treatment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/28—Measuring arrangements characterised by the use of mechanical techniques for measuring roughness or irregularity of surfaces
- G01B5/285—Measuring arrangements characterised by the use of mechanical techniques for measuring roughness or irregularity of surfaces for controlling eveness
Landscapes
- Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- General Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Epidemiology (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Apparatus For Disinfection Or Sterilisation (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Investigating Or Analysing Biological Materials (AREA)
- External Artificial Organs (AREA)
Description
この発明はカセットについての器具の状況を検出するための装置及び方法、特に液体滅菌剤を保持するカセットについてのカセット取り扱い装置の状況を検出するための装置及び方法に関する。
本明細書で援用する米国特許第4,643,876号は滅菌システムを開示している。この滅菌システムは、過酸化水素等の揮発性の殺菌剤を真空滅菌チャンバに導入する。揮発性殺菌剤は気化してチャンバ全体及び滅菌すべきアイテムに拡散することが可能となる。所定の時間経過後、電気的エネルギーを電極に印加してプラズマを生成することで滅菌サイクルを完了する。
したがって、既に説明したシステムと比較してより一層単純でより一層安価であり、操作者の手の接触を最小限に抑える送達システムが求められている。さらに、カセットに関する送達システム及び注入システムの状況が単にタイマを当てにするよりもより一層確かに判断できる送達システムが求められている。
本発明の第1の態様は、少なくとも第1の経路と第2の経路とが存在する表面を持つ器具の表面の凹凸の検出を行うための検出機構に関する。検出機構は、少なくとも1つのコネクタ、第1の爪部、第2の爪部、及び第1の爪部又は第2の爪部の上に設けられたセンサを有する。第1の爪部の第1の端部は第1の爪部の移動が可能となるようにしてコネクタに接続されており、また第1の爪部の第2の端部はその表面上の第1の経路の一部分に接触する。第2の爪部の第1の端部は、第2の爪部の移動が可能となるようにしてコネクタに接続されており、また第2の爪部の第2の端部は第2の経路の一部分に接触する。センサは、第2の爪部に対する第1の爪部の位置を検出する。
本発明の装置は、カセットアセンブリからカセットを抜き取り、カセットを送達システムの中に送り、送達システム内のカセットの位置を検出し、カセットを注入システムで利用可能にし、送達システム内でカセットの位置を進めることでカセットの別の部分を注入システムで利用可能にし、カセット内のセルを使い切るまでこの操作を繰り返し、空になったカセットをカセットアセンブリに戻し、さらに送達システムから空になったカセットアセンブリを排出することを目的とした送達システム及びカセット検出機構を備える。カセット検出機構は、カセット上の溝部に隣接する平坦な隆起部と比較して、カセットの溝部上での溝部内の溝と溝部内の平坦な隆起部との間の高さの変化を検出することで、カセットに関する送達システムの状況の直接表示を提供する。
図1は、カセット24が含まれるスリーブ22を有するカセットアセンブリ20を示す図である。図2はカセットアセンブリ20の構成要素をより詳細に説明するための分解図である。スリーブ22は、開口端部23と閉端部25とを有し、段ボール紙からなる内層26と吸引性のある板紙材料からなる外層28とを有する。カセット24は、細長い矩形状のプラスチック製カセットケース30を有する。このカセットケース30は、58重量%の過酸化水素の溶液を含む複数のセル32を有する。図3(A)に示すように、カセットケース30はセルストリップ38を取り込んで囲むもので、下側ハウジング部分36と該下側ハウジング部分36と嵌合する上側ハウジング部分34とからなる。セルストリップ38は、可撓性材料からなり、複数のセル32を有する。各セル32は、正確に定量された所定量の過酸化水素40を含む。もちろん、過酸化水素40の代わりに他の液状滅菌剤を含むものであってもよい。好ましくは、カセットケース30及びセルストリップ38は、それぞれ適当なポリマー、例えばポリスチレン及びポリエチレンからなる。しかし、当業者はそれらの材料を他の材料に置き換えることが可能であることを認識するであろう。
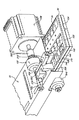
カセットアセンブリ20は、米国特許第5,882,611号に開示されたカセット自動抜き取り機構での使用を意図していたものである。以下に説明するように、既に説明された抜き取り機構を単純化し、さらに該抜き取り機構に対してカセット割り出し(indexing)機構を付け加える。図11乃至図17は、カセット自動抜き取り機構160の一実施形態を説明するためのものである。図11は、カセット自動抜き取り機構160と、これに挿入されるカセットアセンブリ20を示す図である。図11のカセット24は、カセットアセンブリ20のスリーブ22から部分的に抜き出されている。注入アセンブリ162は、図11の下端部、すなわちカセット24の下に位置している。注入アセンブリ162は、米国特許第4,869,286号、同第4,909,287号、同第4,913,196号、同第4,938、262号、及び同第4,941,518号に記載された注入アセンブリと基本的に同じである。なお、本明細書ではこれらの米国特許の開示内容を援用することで、インクジェットアセンブリ162についての詳細な説明を省略する。
カセット感知機構を有するカセット自動抜き取り機構160の操作を次に説明する。
カセットアセンブリ20は、そのスリーブ開口端部23が先になるように、カセット自動抜き取り機構160の収納スロット220に挿入される。カセット自動抜き取り機構160にカセットアセンブリ20を挿入することで、フラグ198の第2の端部が持ち上がる。フラグ198の第2の端部は、スリーブセンサ216に接触し、制御ユニット(図示せず)、例えば滅菌プロセスで使用する制御ユニットへ信号を送る。任意の適当な制御ユニットを用いることができ、例えばマイクロプロセッサに基づく自動制御システム及び並行処理コントローラをここに記載した操作の様々な局面を制御するために使用することができる。制御ユニットはバーコードリーダ172を起動する。このバーコードリーダ172は、スリーブ外層28の矩形状の窓部108及び内層26の横方向に延びる矩形状の窓開口部74を通してカセット24のラベル表示部72を読み取る。ロットコード及び貯蔵期限を含むラベル情報は制御ユニットに送られる。もし、カセット42が貯蔵期限を過ぎているか、もしくは欠陥を有するものであるならば、該カセット42は拒絶され、カセットアセンブリ20はカセット自動抜き取り機構160から取り除かれる。
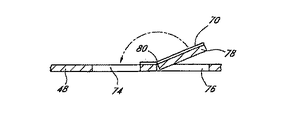
図15は、カセット24が部分的にスリーブ22から抜き出された後のカセット自動抜き取り機構160内のカセット24を示す図である。ソレノイド248を含むカセット自動抜き取り機構160のいくつかの構成要素は、明瞭化のために図15から除いてある。爪部202の第2の端部の先端は、図18(A)に示すように、ブラケット爪部206の先端にあるセンサ212の“U”字をなす2本の腕部間に位置している。爪舌部208及びブラケット爪部206の第2の端部の底部は、カセットケース30の上側ハウジング部分34に置かれている。
図16及び図17は、どのようにして爪部202とブラケット爪部206との垂直方向の相対的な位置がカセットケース30の上側ハウジング部分34上の爪舌部208の位置の判断に使用することができるかを説明するためのものである。
再びカセット自動抜き取り機構160の動作について説明する。ユーザがカセットアセンブリ20をカセット自動抜き取り機構160に挿入すると、フラグ198がカセットアセンブリ20によって持ち上がり、スリーブセンサ216に接触する。スリーブセンサ216は中央処理装置(図示せず)に信号を送り、モータ178を起動させて反時計方向に回転させる。上部ローラガイド192はスリーブ22からカセット24を引き出す。スリーブ20の前方の縁部164は爪部202及びブラケット爪部206の両方を持ち上げる。爪部202はブラケット爪部206のセンサ212の光線252を阻止する(図17参照)。
(A)少なくとも第1の経路と第2の経路とを有する表面を持つ器具のこの表面の凹凸を検出するための検出機構であって、
少なくとも1つのコネクタと、第1の爪部と、第2の爪部と、センサとを備え、
前記第1の爪部の第1の端部は、前記第1の爪部が移動可能となるようにして前記コネクタに接続されており、前記第1の爪部の第2の端部は前記表面上の前記第1の経路の一部分に接触し、
前記第2の爪部の第1の端部は、前記第2の爪部が移動可能となるようにして前記コネクタに接続されており、前記第2の爪部の第2の端部は前記表面上の前記第2の経路の一部分に接触し、
前記センサは、前記第2の爪部に対する前記第1の爪部の位置を検出するために前記第1の爪部又は前記第2の爪部に取り付けられていることを特徴とする検出機構。
(1)前記第1の経路及び前記第2の経路が同一ではない実施態様(A)に記載の検出機構。
(2)前記少なくとも1つのコネクタはピボットであり、前記第1の爪部及び前記第2の爪部は前記ピボットを軸にして回転する実施態様(A)に記載の検出機構。
(3)前記第1の爪部及び前記第2の爪部の動作は重力によるものである実施態様(A)に記載の検出機構。
(4)前記第1の爪部及び前記第2の爪部の動作は液圧機構、空気圧機構、及び少なくとも1本のバネからなる群から選択される移動機構によるものである実施態様(A)に記載の検出機構。
(5)前記表面の前記凹凸は前記器具の上面、底面、又は側面にある実施態様(A)に記載の検出機構。
(7)前記第1の経路は前記第2の経路に隣接している実施態様(1)に記載の検出機構。
(8)制御ユニットをさらに有する実施態様(A)に記載の検出機構。
(9)前記器具はカセットである実施態様(A)に記載の検出機構。
(10)前記カセットは殺菌剤を含む実施態様(9)に記載の検出機構。
(12)前記第1の経路は少なくとも1つの溝部を有し、また前記第2の経路は比較的滑らかである実施態様(A)に記載の検出機構。
(13)前記第1の経路及び前記第2の経路はカセットの一面上にある実施態様(12)に記載の検出機構。
(B)器具の一面の凹凸を検出する方法であって、
第1の経路及び第2の経路を有する面を持つ器具を提供することと、
少なくとも1つのコネクタ、
第1の爪部が移動可能となるようにして前記コネクタに接続した第1の端部を有する前記第1の爪部、
第2の爪部が移動可能となるようにして前記コネクタに接続した第1の端部とを有する前記第2の爪部、及び、
前記第1の爪部又は前記第2の爪部に取り付けられたセンサを有する検出機構を提供することと、
前記第1の爪部の第2の端部が前記器具の前記表面上の前記第1の経路の一部分に接し、前記第2の爪部の第2の端部が前記器具の前記表面上の前記第2の経路の一部分に接するように、前記器具を前記検出機構に挿入することと、
前記センサによって前記第2の爪部に対する前記第1の爪部の位置を判断することと、
前記検出機構中で前記器具を動かすことと、
前記センサによって前記第1の爪部に対する前記第2の爪部の第2の位置を判断することと、
前記表面の凹凸を判断することと
を有することを特徴とする方法。
(14)前記器具を移動させることと、前記第2の爪部に対する前記第1の爪部の位置を判断することとを繰り返すことを備える実施態様(B)に記載の方法。
(15)前記第1の経路及び前記第2の経路は同一ではない実施態様(B)に記載の方法。
(17)前記センサは光電式センサ、電子機械式センサ、及び近接センサからなる群から選択される実施態様(B)に記載の方法。
(18)前記第1の経路は前記第2の経路に隣接している実施態様(15)に記載の方法。
(19)前記検出機構はさらに制御ユニットを備える実施態様(B)に記載の方法。
(20)前記器具はカセットである実施態様(B)に記載の方法。
(22)前記カセットは殺菌剤を含む実施態様(21)に記載の方法。
(23)前記殺菌剤は過酸化水素である実施態様(22)に記載の方法。
(24)前記第1の経路は少なくとも1つの溝部を有し、また前記第2の経路は比較的滑らかである実施態様(22)に記載の方法。
(25)前記第1の爪部の前記第2の端部が前記カセットの前記面上の前記第1の経路にある前記少なくとも1つの溝部に接するまで前記カセットを動かすことをさらに備え、それによって前記滅菌システムに殺菌剤を注入するための前記カセットを位置決めする実施態様(24)に記載の方法。
(26)前記殺菌剤を前記滅菌システムに注入することをさらに有する実施態様(25)に記載の方法。
【図面の簡単な説明】
【図1】
スリーブ内にあるカセットの斜視図である。
【図2】
図1のカセット及びスリーブの分解組立図である。
【図3】
(A)は図2の2A−2A線に沿う断面図であり、(B)は図2の2B−2B線に沿う断面図である。
【図4】
図1のスリーブの内層を形成する広げられた半加工板の平面図である。
【図5】
図1の外層を形成する広げられた半加工板の平面図である。
【図6】
図4のスリーブ内層に取り付けられる識別ラベルの斜視図である。
【図7】
収納位置で示された図6のラベルの断面図である。
【図8】
移動位置にあるラベルを示す図7と同様の断面図である。
【図9】
ラベルが開口部を通して目で見える露出位置にあるラベルを示す図7と同様の断面図である。
【図10】
スリーブから部分的に取り外されたカセットを有するカセットアセンブリの斜視図である。
【図11】
本発明にもとづくカセット検出機構及び送達システムに置かれた図1のカセット及びスリーブの斜視図である。
【図12】
図11の送達システム及びカセット検出機構の別の斜視図である。
【図13】
図11の送達システム及びカセット検出機構の上面図である。
【図14】
図11の送達システム及びカセット検出機構の側面図である。
【図15】
図11の送達システム及びカセット検出機構に置かれた図1のカセット及びスリーブの部分切欠斜視図であり、カセット検出機構の爪部がカセットの溝部に乗っている状態を示す図である。
【図16】
カセット検出機構上の爪部が該カセットの溝部の底部にある場合にセンサーの光線の位置を示す図11の送達システム及びカセット検出機構に置かれた図1のカセット及びスリーブの部分切欠斜視図である。
【図17】
カセットが送達システムに入る時に爪部がカセット上の平坦な隆起部の上部にある状態での光線の位置を想像線で示す図11の送達システム及びカセット検出機構に置かれた図1のカセット及びスリーブの部分切欠斜視図である。
【図18】
(A)は爪部及びブラケット爪部が共通のピボットに取り付けられているカセット検出機構の一実施形態の一部分の概略上面図であり、(B)は(A)のカセット検出機構の概略側面図である。
【図19】
(A)は爪部及びブラケット爪部が2つの異なるピボットに取り付けられているカセット検出機構の一実施形態の一部分を示す概略上面図であり、(B)は(A)のカセット検出機構の概略側面図である。
【図20】
支持体のバネに爪部及びブラケット爪部が取り付けられ、かつ爪部及びブラケット爪部が回転するのではなく横方向に移動するカセット検出機構の一実施形態の一部分を示す模式的側面図である。
【図21】
滅菌装置の略図である。
Claims (20)
- 器具の表面の凹凸を検出するための検出機構であって、前記表面はこの表面に沿った少なくとも第1の経路と前記第1の経路とは別の第2の経路とを有し、前記第1の経路は少なくとも1つの溝部を有し、前記第2の経路は比較的滑らかである、検出機構において、
前記器具よりも上側に位置し、前記溝部を横切る方向に前記器具に対して直線的に移動することができる少なくとも1つのコネクタと、
第1の爪部であって、前記第1の爪部の第1の端部は、前記コネクタの移動中、前記第1の爪部が上下方向に移動可能となるように前記コネクタに接続されており、前記第1の爪部の第2の端部は、当該第2の端部から下側に向って延びる爪舌部を備え、当該爪舌部は前記表面上の前記第1の経路の一部分に接触し、前記爪舌部は、前記第2の端部から延びる第1の面と前記第1の面に向って傾斜した第2の面とを含み、前記第2の面は、前記コネクタの進行方向を向いている、第1の爪部と、
第2の爪部であって、前記第2の爪部の第1の端部は、前記コネクタの移動中、前記第2の爪部が、前記第1の爪部とは独立して上下方向に移動可能となるように前記コネクタに接続されており、前記第2の爪部の第2の端部は、当該第2の端部から延びる下側部分が前記表面上の前記第2の経路の一部分に接触する、第2の爪部と、
前記第1の爪部又は前記第2の爪部に取り付けられていて、前記第2の爪部に対する前記第1の爪部の位置を検出するセンサと、
を備えている、検出機構。
- 前記センサは、前記第2の爪部の前記第2の端部に対する前記第1の爪部の前記第2の端部の位置を検出するために前記第1の爪部の前記第2の端部又は前記第2の爪部の前記第2の端部に取り付けられている、請求項1に記載の検出機構。
- 前記少なくとも1つのコネクタはピボットであり、前記第1の爪部及び前記第2の爪部は前記ピボットを軸にして回転する、請求項1または2に記載の検出機構。
- 前記第1の爪部及び前記第2の爪部の動作は、重力によるものである、請求項1〜3のいずれかに記載の検出機構。
- 前記第1の爪部及び前記第2の爪部の動作は、液圧機構、空気圧機構、及び少なくとも1つのバネからなる群から選択される移動機構によるものである、請求項1〜3のいずれかに記載の検出機構。
- 前記センサは、光電式センサ、電子機械式センサ、及び近接センサからなる群から選択される、請求項1〜5のいずれかに記載の検出機構。
- 前記第1の経路は、前記第2の経路に隣接している、請求項1〜6のいずれかに記載の検出機構。
- 制御ユニットをさらに備える、請求項1〜7のいずれかに記載の検出機構。
- 前記器具は殺菌剤を収容するためのカセットである、請求項1〜8のいずれかに記載の検出機構。
- カセット自動抜き取りシステムにおける前記カセットの場所の表示を提供するために、前記カセット自動抜き取りシステムに組み込まれる、請求項9に記載の検出機構。
- 器具の表面の凹凸を検出する方法であって、
表面にその表面に沿った第1の経路及び前記第1の経路とは別の第2の経路を有し、前記第1の経路は少なくとも1つの溝部を有し、前記第2の経路は比較的滑らかである器具を提供することと、
前記器具よりも上側に位置し、前記溝部を横切る方向に前記器具に対して直線的に移動することができる少なくとも1つのコネクタ、
第1の爪部であって、前記コネクタの移動中、前記第1の爪部が上下方向に移動可能となるように前記コネクタに接続された第1の端部、および第2の端部を有し、前記第2の端部が当該第2の端部から下側に向って延びる爪舌部を備え、前記爪舌部は、前記第2の端部から延びる第1の面と前記第1の面に向って傾斜した第2の面とを含み、前記第2の面は、前記コネクタの進行方向を向いている、第1の爪部、
第2の爪部であって、前記コネクタの移動中、前記第2の爪部が前記第1の爪部とは独立して上下方向に移動可能となるように前記コネクタに接続された第1の端部、および第2の端部を有する、第2の爪部、及び、
前記第1の爪部又は前記第2の爪部に取り付けられたセンサ
を備えた検出機構を提供することと、
前記第1の爪部の第2の端部から延びる前記爪舌部が前記器具の前記表面上の前記第1の経路の一部分に接し、前記第2の爪部の第2の端部から延びる下側部分が前記器具の前記表面上の前記第2の経路の一部分に接するように、前記器具を前記検出機構に挿入することと、
前記センサによって前記第2の爪部に対する前記第1の爪部の位置を判断することと、
前記検出機構中で前記器具を動かすことによって前記コネクタを前記器具に対して移動させることと、
前記センサによって前記第2の爪部に対する前記第1の爪部の第2の位置を判断することと、
前記表面の凹凸を判断することと
を含む、方法。
- 前記器具を動かすことと、前記第2の爪部に対する前記第1の爪部の位置を判断することとを繰り返すことを含む、請求項11に記載の方法。
- 前記少なくとも1つのコネクタはピボットであり、前記第1の爪部及び前記第2の爪部は前記ピボットを軸にして回転する、請求項11または12に記載の方法。
- 前記センサは、光電式センサ、電子機械式センサ、及び近接センサからなる群から選択される、請求項11〜13のいずれかに記載の方法。
- 前記第1の経路は、前記第2の経路に隣接している、請求項11〜14のいずれかに記載の方法。
- 前記検出機構はさらに制御ユニットを備える、請求項11〜15のいずれかに記載の方法。
- 前記器具は殺菌剤を収容するためのカセットである、請求項11〜16のいずれかに記載の方法。
- 前記検出機構は滅菌システムに設けられる、請求項17に記載の方法。
- 前記第1の爪部の前記第2の端部が前記カセットの前記表面上の前記第1の経路にある前記少なくとも1つの溝部に接するまで前記カセットを動かし、それによって前記滅菌システムに殺菌剤を注入するための前記カセットの位置を決めることをさらに含む、請求項17または18に記載の方法。
- 前記殺菌剤を前記滅菌システムに注入することをさらに含む、請求項19に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US500182 | 2000-02-07 | ||
| US09/500,182 US6412340B1 (en) | 2000-02-07 | 2000-02-07 | Cell detection mechanism |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001289629A JP2001289629A (ja) | 2001-10-19 |
| JP2001289629A5 JP2001289629A5 (ja) | 2010-12-02 |
| JP5225523B2 true JP5225523B2 (ja) | 2013-07-03 |
Family
ID=23988372
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001031486A Expired - Fee Related JP5225523B2 (ja) | 2000-02-07 | 2001-02-07 | セル検出機構 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6412340B1 (ja) |
| EP (1) | EP1122510B1 (ja) |
| JP (1) | JP5225523B2 (ja) |
| AU (1) | AU783034B2 (ja) |
| CA (1) | CA2334140C (ja) |
| DE (1) | DE60119401T2 (ja) |
| ES (1) | ES2262607T3 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60028964T2 (de) | 1999-03-17 | 2007-02-08 | Ethicon, Inc. | Behälter für sterilisierungsmittelkapseln und sterilisator |
| US7101512B2 (en) * | 2000-12-15 | 2006-09-05 | Ethicon, Inc. | Cassette and delivery system |
| TW501505U (en) * | 2001-10-12 | 2002-09-01 | Che Central Mint Of China | Breakdown alarming apparatus for casting workpiece |
| US8440139B2 (en) | 2004-03-04 | 2013-05-14 | Ethican, Inc. | Method of delivering liquid sterilant to a sterilizer |
| US7309014B2 (en) * | 2004-03-04 | 2007-12-18 | Ethicon, Inc. | Sterilizer cassette handling system with dual visual code reading |
| US7602284B2 (en) * | 2004-03-04 | 2009-10-13 | Ethicon, Inc. | Sterilizer cassette handling system with data link |
| US20050263422A1 (en) * | 2004-05-28 | 2005-12-01 | Kohler James P | Cassette assembly |
| US20050263421A1 (en) * | 2004-05-28 | 2005-12-01 | Kohler James P | Cassette with encoded lumen claim |
| US7452504B2 (en) | 2004-05-28 | 2008-11-18 | Ethicon, Inc. | Sterilization/disinfection cycle control |
| US7811530B2 (en) * | 2004-10-29 | 2010-10-12 | Ethicon, Inc. | Sterilization cassette and packaging |
| CA2881319C (en) | 2012-08-07 | 2017-03-28 | Scican Ltd. | Container for washing, sterilization, transportation and sterile storage of articles |
| JP5696740B2 (ja) * | 2012-12-13 | 2015-04-08 | キヤノンマーケティングジャパン株式会社 | 滅菌装置、滅菌方法、プログラム |
| BR112021000179A2 (pt) * | 2018-07-27 | 2021-05-11 | Sanofi Pasteur | unidade de embalagem pronta para venda que contém pelo menos um produto farmacêutico, um conjunto que inclui uma pluralidade de tais unidades de embalagem e método para produzir tal unidade de embalagem |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB552675A (en) * | 1941-09-16 | 1943-04-20 | Kapella Ltd | Improvements in or relating to apparatus for measuring or indicating the shape of a surface or the degree of roughness thereof |
| DE1250135B (ja) * | 1963-04-01 | 1967-09-14 | ||
| US3741054A (en) | 1971-10-26 | 1973-06-26 | Philadelphia College Of Textil | Material thickness detector |
| JPS6067811A (ja) * | 1983-09-26 | 1985-04-18 | Toshiba Corp | 識別装置 |
| JPS60134108U (ja) * | 1984-02-18 | 1985-09-06 | 田中 清作 | 帯状連続体の継目検出装置 |
| US4643876A (en) | 1985-06-21 | 1987-02-17 | Surgikos, Inc. | Hydrogen peroxide plasma sterilization system |
| US4756882A (en) | 1985-06-21 | 1988-07-12 | Surgikos Inc. | Hydrogen peroxide plasma sterilization system |
| JPS62194401A (ja) * | 1985-08-08 | 1987-08-26 | Tokyo Seimitsu Co Ltd | 載置型表面粗さ測定機 |
| JPS6230103U (ja) * | 1985-08-08 | 1987-02-23 | ||
| JPS63173908A (ja) * | 1987-01-14 | 1988-07-18 | Kanai Hiroyuki | 段差測定装置 |
| JPH0743257B2 (ja) * | 1987-02-25 | 1995-05-15 | オムロン株式会社 | 紙葉類の判定装置 |
| US4817800A (en) | 1987-05-20 | 1989-04-04 | Surgikos, Inc. | Fluid injection system cassette and fluid packaging methods |
| US4869286A (en) | 1987-05-20 | 1989-09-26 | Surgikos, Inc. | Fluid injection system coupling and injector valve |
| US4941518A (en) | 1987-05-20 | 1990-07-17 | Johnson & Johnson Medical, Inc. | Fluid injection system |
| US4909287A (en) | 1987-05-20 | 1990-03-20 | Surgikos, Inc. | Fluid injection system |
| US4913196A (en) | 1987-05-20 | 1990-04-03 | Surgikos, Inc. | Fluid injection system pumping methods |
| US4938262A (en) | 1987-05-20 | 1990-07-03 | Johnson & Johnson Medical, Inc. | Fluid injection system |
| JPH06100441B2 (ja) * | 1991-05-24 | 1994-12-12 | ハリコム株式会社 | 帯状連続体の継目検出装置 |
| FR2677116B1 (fr) | 1991-06-03 | 1993-09-10 | Mecamarc | Detecteur de relief sur surface mobile. |
| US5656238A (en) | 1994-10-11 | 1997-08-12 | Johnson & Johnson Medical, Inc. | Plasma-enhanced vacuum drying |
| US5887716A (en) | 1997-06-02 | 1999-03-30 | Johnson & Johnson Medical, Inc. | Liquid sterilant cassette and indicia system |
| US5882611A (en) | 1997-06-02 | 1999-03-16 | Ethicon, Inc. | Cassette and delivery system |
-
2000
- 2000-02-07 US US09/500,182 patent/US6412340B1/en not_active Expired - Fee Related
-
2001
- 2001-02-05 AU AU18295/01A patent/AU783034B2/en not_active Ceased
- 2001-02-05 CA CA2334140A patent/CA2334140C/en not_active Expired - Fee Related
- 2001-02-06 ES ES01301020T patent/ES2262607T3/es not_active Expired - Lifetime
- 2001-02-06 DE DE60119401T patent/DE60119401T2/de not_active Expired - Lifetime
- 2001-02-06 EP EP01301020A patent/EP1122510B1/en not_active Expired - Lifetime
- 2001-02-07 JP JP2001031486A patent/JP5225523B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CA2334140C (en) | 2010-05-25 |
| EP1122510A1 (en) | 2001-08-08 |
| EP1122510B1 (en) | 2006-05-10 |
| ES2262607T3 (es) | 2006-12-01 |
| DE60119401D1 (de) | 2006-06-14 |
| US6412340B1 (en) | 2002-07-02 |
| AU783034B2 (en) | 2005-09-15 |
| DE60119401T2 (de) | 2007-04-19 |
| JP2001289629A (ja) | 2001-10-19 |
| AU1829501A (en) | 2001-08-09 |
| CA2334140A1 (en) | 2001-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5225523B2 (ja) | セル検出機構 | |
| EP0882458B1 (en) | Cassette and indicia system | |
| EP0882457B1 (en) | Cassette and delivery system | |
| TWI494859B (zh) | 具有資料鏈結之消毒器盒處理系統 | |
| CA2507090C (en) | Sterilization/disinfection cycle control | |
| CA2523617C (en) | Sterilization cassette and packaging | |
| JP4219586B2 (ja) | カセットおよびスリーブを含むアセンブリならびに前記スリーブを製作する方法 | |
| JP4767587B2 (ja) | 手術器具の滅菌装置に滅菌剤を配給するためのカセット | |
| US20230398252A1 (en) | Apparatus And Method For Detecting Improper Positioning Of Removable Component Of Sterilizing System | |
| EP1570864B1 (en) | Sterilizer cassette handling system with dual visual code reading | |
| JP2005334655A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080206 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100611 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100706 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101006 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20101012 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101014 |
|
| A524 | Written submission of copy of amendment under section 19 (pct) |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20101014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111014 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121026 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121205 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20121213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130313 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160322 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |