JP5190712B2 - 障害物検出装置 - Google Patents
障害物検出装置 Download PDFInfo
- Publication number
- JP5190712B2 JP5190712B2 JP2009071790A JP2009071790A JP5190712B2 JP 5190712 B2 JP5190712 B2 JP 5190712B2 JP 2009071790 A JP2009071790 A JP 2009071790A JP 2009071790 A JP2009071790 A JP 2009071790A JP 5190712 B2 JP5190712 B2 JP 5190712B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- dimensional object
- region
- extracting
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 16
- 238000006243 chemical reaction Methods 0.000 claims description 43
- 230000009466 transformation Effects 0.000 claims description 34
- 230000003287 optical effect Effects 0.000 claims description 29
- 238000000605 extraction Methods 0.000 claims description 24
- 238000000034 method Methods 0.000 claims description 21
- 230000008569 process Effects 0.000 claims description 18
- 239000007787 solid Substances 0.000 claims description 17
- 239000000284 extract Substances 0.000 claims description 8
- 238000009825 accumulation Methods 0.000 claims description 2
- 240000004050 Pentaglottis sempervirens Species 0.000 description 6
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 6
- 230000006870 function Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/26—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view to the rear of the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/586—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of parking space
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/302—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing combining image information with GPS information or vehicle data, e.g. vehicle speed, gyro, steering angle data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8093—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for obstacle warning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Description
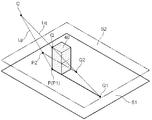
前記カメラで撮影された1フレームの撮影画像を、路面上に設定した仮想平面及び路面と平行する姿勢で路面との高さが異なる複数の仮想平面のうち、少なくとも2つの仮想平面に対して上方視点から見下ろした変換画像に射影変換する射影変換手段と、
前記射影変換手段で生成された複数の変換画像から輪郭を抽出し、この輪郭が抽出された複数の変換画像を重ねた状態において重複する画像領域で、かつ、光学中心から放射状に形成される領域に沿って存在する前記画像領域から立体物画像が存在する立体物領域を抽出する立体物領域抽出手段とを備えている点にある。
その結果、1つのカメラを用いタイムラグを生ずることなく立体物の抽出が可能な障害物検出装置が構成された。
この立体物領域特定手段は、前記撮影画像から射影変換手段によって生成された変換画像上、又は、前記カメラで撮影された撮影画像上に前記特定情報を表示するための位置情報を生成するものであっても良い。
前記立体物領域抽出手段が、前記第1射影変換手段で生成された変換画像と、前記第2射影変換手段で生成された変換画像とから前記画像領域を抽出し、これらを重ねた状態において重複する前記画像領域で、かつ、光学中心から放射状に形成される領域に沿って存在する前記画像領域を立体物領域として抽出する処理を行っても良い。
〔全体構成〕
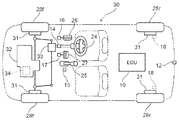
本発明の障害物検出装置は、例えば、駐車支援装置や運転支援装置などに利用される。図1及び図2は、障害物検出装置が搭載される車両30の基本構成を示したものである。運転席に備えられたステアリングホイール24は、パワーステアリングユニット33と連動し、回転操作力を前輪28fに伝えて車両30の操舵を行う。前輪28fは本発明の操舵輪に相当する。車体前部にはエンジン32と、このエンジン32からの動力を変速して前輪28fや後輪28rに伝えるトルクコンバータやCVT等を有する変速機構34とが配置されている。車両30の駆動方式(前輪駆動、後輪駆動、四輪駆動)に応じて、前輪28f及び後輪28rの双方もしくは何れかに動力が伝達される。運転席の近傍には走行速度を制御するアクセル操作手段としてのアクセルペダル26と、前輪28f及び後輪28rのブレーキ装置31を介して前輪28f及び後輪28rに制動力を作用させるブレーキペダル27とが並列配置されている。
ECU10は、マイクロプロセッサを有しプログラムを実行することにより必要とする処理を実現する。また、このECUは、図6に示すように、ステアリングセンサ14、シフト位置センサ15、アクセルセンサ16、ブレーキセンサ17、回転センサ18夫々からの信号を取得する自車位置演算部1と、この自車位置演算部1からの情報に基づいてカメラ12を制御する画像制御部2と、この画像制御部を介してカメラ12から取得した撮影画像を保存するフレームメモリMとを備えている。更に、このECU10は、フレームメモリMからの1フレーム(1コマ)の撮影画像から上方視点のから見下ろした2種の変換画像を生成する射影変換手段Tと、射影変換手段Tを構成する第1射影変換手段T1及び第2射影変換手段T2から立体物領域を抽出する立体物領域抽出手段4と、立体物領域抽出手段4からの情報に基づいて立体物が存在する領域を特定する立体物領域特定手段5と、立体物領域特定手段5で特定される立体物の画像の歪みを補正してモニタ20に出力する射影歪補正部6と、立体物領域特定手段4で特定される立体物領域に含まれる立体物を重畳してモニタ20に出力する重畳部7とを備えている。
この障害物検出装置での処理の概要を図7のフローチャートに示しており、図6に示すECU10の制御構成における情報の流れと併せて説明する。
本発明は、上記した実施の形態以外に以下のように構成しても良い。
5 立体物領域特定手段
12 カメラ
C 光学中心
S 仮想平面
S1 第1仮想平面
S2 第2仮想平面
T 射影変換手段
T1 第1射影変換手段
T2 第2射影変換手段
Claims (4)
- 車両周辺を撮影するカメラと、
前記カメラで撮影された1フレームの撮影画像を、路面上に設定した仮想平面及び路面と平行する姿勢で路面との高さが異なる複数の仮想平面のうち、少なくとも2つの仮想平面に対して上方視点から見下ろした変換画像に射影変換する射影変換手段と、
前記射影変換手段で生成された複数の変換画像から輪郭を抽出し、この輪郭が抽出された複数の変換画像を重ねた状態において重複する画像領域で、かつ、光学中心から放射状に形成される領域に沿って存在する前記画像領域から立体物画像が存在する立体物領域を抽出する立体物領域抽出手段とを備えている障害物検出装置。 - 前記立体物領域抽出手段で抽出された立体物領域の位置を特定するための特定情報を生成する立体物領域特定手段が備えられると共に、
この立体物領域特定手段は、前記撮影画像から射影変換手段によって生成された変換画像上、又は、前記カメラで撮影された撮影画像上に前記特定情報を表示するための位置情報を生成する請求項1記載の障害物検出装置。 - 前記立体物領域抽出手段が、複数の前記変換画像から輪郭抽出フィルタでの輪郭を抽出する画像領域抽出処理と、前記複数の射影画像を重ね合わせて前記画像領域の累積を取ることで重複する前記画像領域を立体物候補領域として抽出する立体物候補領域抽出処理と、前記立体物候補領域のうち前記光学中心から放射状に形成される領域に沿って形成されたものを立体物領域として抽出する立体物画像抽出処理とを行う請求項1又は2記載の障害物検出装置。
- 前記射影変換手段が、1フレームの撮影画像を、路面上に設定した仮想平面又は路面と平行する姿勢の第1仮想平面に対して射影変換を行う第1射影変換手段と、前記1フレームの撮影画像を、前記第1仮想平面と平行姿勢で、これより高い高さとなる第2仮想平面に対して射影変換を行う第2射影変換手段とで構成され、
前記立体物領域抽出手段が、前記第1射影変換手段で生成された変換画像と、前記第2射影変換手段で生成された変換画像とから前記画像領域を抽出し、これらを重ねた状態において重複する前記画像領域で、かつ、光学中心から放射状に形成される領域に沿って存在する前記画像領域を立体物領域として抽出する処理を行う請求項1〜3のいずれか一項に記載の障害物検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009071790A JP5190712B2 (ja) | 2009-03-24 | 2009-03-24 | 障害物検出装置 |
| US12/729,752 US20100245578A1 (en) | 2009-03-24 | 2010-03-23 | Obstruction detecting apparatus |
| EP10003065.9A EP2233358B1 (en) | 2009-03-24 | 2010-03-23 | Obstruction detecting apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009071790A JP5190712B2 (ja) | 2009-03-24 | 2009-03-24 | 障害物検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010226449A JP2010226449A (ja) | 2010-10-07 |
| JP5190712B2 true JP5190712B2 (ja) | 2013-04-24 |
Family
ID=42173479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009071790A Expired - Fee Related JP5190712B2 (ja) | 2009-03-24 | 2009-03-24 | 障害物検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20100245578A1 (ja) |
| EP (1) | EP2233358B1 (ja) |
| JP (1) | JP5190712B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5068779B2 (ja) * | 2009-02-27 | 2012-11-07 | 現代自動車株式会社 | 車両周囲俯瞰画像表示装置及び方法 |
| JP5870608B2 (ja) * | 2011-10-13 | 2016-03-01 | アイシン精機株式会社 | 画像生成装置 |
| US9019347B2 (en) | 2011-10-13 | 2015-04-28 | Aisin Seiki Kabushiki Kaisha | Image generator |
| US9082021B2 (en) * | 2011-11-01 | 2015-07-14 | Aisin Seiki Kabushiki Kaisha | Obstacle alert device |
| WO2013094242A1 (ja) * | 2011-12-19 | 2013-06-27 | 日産自動車株式会社 | 立体物検出装置 |
| EP2610778A1 (en) * | 2011-12-27 | 2013-07-03 | Harman International (China) Holdings Co., Ltd. | Method of detecting an obstacle and driver assist system |
| WO2013129355A1 (ja) * | 2012-03-01 | 2013-09-06 | 日産自動車株式会社 | 立体物検出装置 |
| JP6025365B2 (ja) * | 2012-04-04 | 2016-11-16 | 京セラ株式会社 | 較正処理装置、カメラ較正装置、カメラシステム、およびカメラ較正方法 |
| JP5961472B2 (ja) | 2012-07-27 | 2016-08-02 | 日立建機株式会社 | 作業機械の周囲監視装置 |
| US9013286B2 (en) * | 2013-09-23 | 2015-04-21 | Volkswagen Ag | Driver assistance system for displaying surroundings of a vehicle |
| EP3048558A1 (en) | 2015-01-21 | 2016-07-27 | Application Solutions (Electronics and Vision) Ltd. | Object detecting method and object detecting apparatus |
| US10157452B1 (en) | 2015-09-28 | 2018-12-18 | Amazon Technologies, Inc. | Image processing system for image rectification |
| JP6091586B1 (ja) * | 2015-11-12 | 2017-03-08 | 三菱電機株式会社 | 車両用画像処理装置および車両用画像処理システム |
| JP6658054B2 (ja) * | 2016-02-16 | 2020-03-04 | トヨタ車体株式会社 | 車体部品の施工部位判定システム及び施工部位判定方法 |
| JP6944328B2 (ja) * | 2017-09-29 | 2021-10-06 | 株式会社デンソー | 車両の周辺監視装置と周辺監視方法 |
| CN108665448B (zh) * | 2018-04-27 | 2022-05-13 | 武汉理工大学 | 一种基于双目视觉的障碍物检测方法 |
| JP7117177B2 (ja) * | 2018-06-29 | 2022-08-12 | 株式会社パスコ | 領域特定装置及びプログラム |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5640222A (en) * | 1996-03-15 | 1997-06-17 | Paul; Eddie | Method and apparatus for producing stereoscopic images |
| JP3286306B2 (ja) | 1998-07-31 | 2002-05-27 | 松下電器産業株式会社 | 画像生成装置、画像生成方法 |
| JP4861574B2 (ja) | 2001-03-28 | 2012-01-25 | パナソニック株式会社 | 運転支援装置 |
| EP1291668B1 (en) * | 2001-09-07 | 2005-11-30 | Matsushita Electric Industrial Co., Ltd. | Vehicle surroundings display device and image providing system |
| JP2003102001A (ja) * | 2001-09-19 | 2003-04-04 | Matsushita Electric Ind Co Ltd | 後方視界表示装置 |
| EP1637836A1 (en) * | 2003-05-29 | 2006-03-22 | Olympus Corporation | Device and method of supporting stereo camera, device and method of detecting calibration, and stereo camera system |
| JP4406381B2 (ja) * | 2004-07-13 | 2010-01-27 | 株式会社東芝 | 障害物検出装置及び方法 |
| JP3937414B2 (ja) * | 2004-08-11 | 2007-06-27 | 本田技研工業株式会社 | 平面検出装置及び検出方法 |
| JP2006151125A (ja) * | 2004-11-26 | 2006-06-15 | Omron Corp | 車載用画像処理装置 |
| US8164628B2 (en) * | 2006-01-04 | 2012-04-24 | Mobileye Technologies Ltd. | Estimating distance to an object using a sequence of images recorded by a monocular camera |
| JP4820221B2 (ja) * | 2006-06-29 | 2011-11-24 | 日立オートモティブシステムズ株式会社 | 車載カメラのキャリブレーション装置およびプログラム |
| JP4642723B2 (ja) * | 2006-09-26 | 2011-03-02 | クラリオン株式会社 | 画像生成装置および画像生成方法 |
| JP4257356B2 (ja) * | 2006-09-26 | 2009-04-22 | 株式会社日立製作所 | 画像生成装置および画像生成方法 |
| JP2008085710A (ja) | 2006-09-28 | 2008-04-10 | Sanyo Electric Co Ltd | 運転支援システム |
| JP4969269B2 (ja) * | 2007-02-21 | 2012-07-04 | アルパイン株式会社 | 画像処理装置 |
| JP2008271308A (ja) * | 2007-04-23 | 2008-11-06 | Sanyo Electric Co Ltd | 画像処理装置及び方法並びに車両 |
| JP2009060499A (ja) * | 2007-09-03 | 2009-03-19 | Sanyo Electric Co Ltd | 運転支援システム及び連結車両 |
| JP5057936B2 (ja) * | 2007-11-09 | 2012-10-24 | アルパイン株式会社 | 鳥瞰画像生成装置および方法 |
-
2009
- 2009-03-24 JP JP2009071790A patent/JP5190712B2/ja not_active Expired - Fee Related
-
2010
- 2010-03-23 EP EP10003065.9A patent/EP2233358B1/en not_active Not-in-force
- 2010-03-23 US US12/729,752 patent/US20100245578A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP2233358A1 (en) | 2010-09-29 |
| JP2010226449A (ja) | 2010-10-07 |
| US20100245578A1 (en) | 2010-09-30 |
| EP2233358B1 (en) | 2013-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5190712B2 (ja) | 障害物検出装置 | |
| JP6094266B2 (ja) | 駐車支援装置、駐車支援方法およびプログラム | |
| JP3947375B2 (ja) | 駐車補助装置 | |
| JP5067632B2 (ja) | 鳥瞰画像生成装置 | |
| KR101670847B1 (ko) | 차량 주변 이미지 생성 장치 및 방법 | |
| EP3664014B1 (en) | Display control device | |
| JP2017520133A (ja) | 車両周辺イメージ生成装置および方法 | |
| JP4797877B2 (ja) | 車両用映像表示装置及び車両周囲映像の表示方法 | |
| JP2012076483A (ja) | 駐車支援装置 | |
| EP3002727B1 (en) | Periphery monitoring apparatus and periphery monitoring system | |
| JP6958163B2 (ja) | 表示制御装置 | |
| US9162621B2 (en) | Parking support apparatus | |
| JP6554866B2 (ja) | 画像表示制御装置 | |
| JP6398675B2 (ja) | 画像生成装置 | |
| CN110997409B (zh) | 周边监控装置 | |
| JP2021154969A (ja) | 障害物検知装置、障害物検知方法、および、プログラム | |
| JP2022023870A (ja) | 表示制御装置 | |
| JP2004104478A (ja) | 駐車アシスト装置及び駐車アシスト方法 | |
| JP2013062692A (ja) | 車載カメラの較正装置及び方法 | |
| JP5651491B2 (ja) | 画像表示システム、画像表示装置、及び、画像表示方法 | |
| JP2010128795A (ja) | 障害物検出装置 | |
| JP5182589B2 (ja) | 障害物検出装置 | |
| JP2012061989A (ja) | 画像処理装置、及び、画像処理方法 | |
| JP7110592B2 (ja) | 画像処理装置 | |
| JP2005035542A (ja) | 駐車補助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121025 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130117 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5190712 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160208 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |