JP5146233B2 - メディア搬送機構及びそれを備えたメディア処理装置 - Google Patents
メディア搬送機構及びそれを備えたメディア処理装置 Download PDFInfo
- Publication number
- JP5146233B2 JP5146233B2 JP2008252582A JP2008252582A JP5146233B2 JP 5146233 B2 JP5146233 B2 JP 5146233B2 JP 2008252582 A JP2008252582 A JP 2008252582A JP 2008252582 A JP2008252582 A JP 2008252582A JP 5146233 B2 JP5146233 B2 JP 5146233B2
- Authority
- JP
- Japan
- Prior art keywords
- media
- medium
- arm
- gripping
- transport
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Landscapes
- Sheets, Magazines, And Separation Thereof (AREA)
Description
びそれを備えたメディア処理装置に関する。
クダビング装置、データの書き込みとレーベル印刷を行ってメディアを制作して発行可能
なCD/DVDパブリッシャなどのメディア処理装置が用いられつつある。この種のメデ
ィア処理装置としては、メディアへデータを書き込むドライブ、メディアのレーベル面に
印刷を施すプリンタ及びこれらドライブやプリンタに対してメディアを把持して搬送する
メディア搬送機構を備えたものが知られている(例えば、特許文献1参照)。
状態で収容されるが、スタッカ内では上下のメディア同士が密着して貼り付き力が生じる
場合があり、最上部の1枚のメディアを持ち上げる際に、直下(すなわち2枚目)のメデ
ィアが貼り付いて持ち上げられることがある。
そして、2枚のメディアが貼り付いたまま搬送してしまうと、搬送する先のドライブ等
で不具合が生じる。また、最上部のメディアの把持不良も生じやすい。
ディア搬送機構及びそれを備えたメディア処理装置を提供することを目的としている。
この構成によれば、搬送アームの移動によってレバーを移動されるので、専用の駆動機構を設けることなく、レバーを移動させて把持対象のメディアの直下のメディアを蹴落とすことができる。
とを特徴とする。
この構成のメディア処理装置によれば、積層状態のメディアの最上部のメディアだけを
確実に把持することが可能なメディア搬送機構を備えているので、処理対象の所定のメデ
ィアを1枚のみ確実に搬送することができ、処理の信頼性の高い処理装置とすることがで
きる。
ついて図面を参照して説明する。
なお、本実施形態では、パブリッシャからなるメディア処理装置に適用した場合を例に
とって説明する。
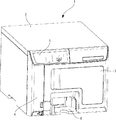
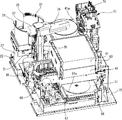
図1はパブリッシャ(メディア処理装置)の外観斜視図、図2はパブリッシャのケース
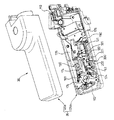
を外した状態の前方側の斜視図、図3はパブリッシャのケースを外した状態の後方側の斜
視図、図4はパブリッシャに設置されたレーベルプリンタ部分の斜視図である。
込みやメディアのレーベル面への印刷を行うメディア処理装置であり、ほぼ直方体形状の
ケース2を備えている。このケース2の前面には、左右に開閉可能な開閉扉3,4が取り
付けられている。ケース2の上側左端部には、表示ランプ、操作ボタンなどが配列された
操作面5が設けられており、また、ケース2の下端には、メディア排出口6が設けられて
いる。
成済みメディアMBを取り出すときに開閉する扉である。
また、正面視左側の開閉扉4は、レーベルプリンタ11のインクカートリッジ12の入
れ換え時に開閉するためのものであり、この開閉扉4を開けると、鉛直方向に配列された
複数のカートリッジホルダ13を有するカートリッジ装着部14(図2参照)が露出する
ようになっている。
が行われていない複数枚の未使用のブランクメディアMAをスタック可能なメディア保管
部としてのブランクメディアスタッカ21と、作成済みメディアMBが保管されるメディ
ア保管部としての作成済みメディアスタッカ22が同軸状態で上下に配置されている。ブ
ランクメディアスタッカ21及び作成済みメディアスタッカ22は、それぞれ図2に示し
た所定位置に対して着脱自在である。
これにより、ブランクメディアMAを上側から受け入れ、同軸に積層した状態で収納可能
な構成をなしている。ブランクメディアスタッカ21にブランクメディアMAを収納ある
いは補充する作業は、開閉扉3を開けてスタッカを取り出すことにより、簡単に行うこと
が可能となっている。
板27,28を備えており、これによって、作成済みメディアMBを上側から受け入れ、
同軸に積層した状態で収納可能なスタッカが構成されている。
ーベル面印刷が終了したメディア)を取り出すこともできる。
、メディア搬送機構31が配置されている。メディア搬送機構31は、ベース72に取り
付けられている水平支持板部34とシャーシ32の天板33との間に垂直に架け渡されて
いる垂直ガイド軸35を有している(図5参照)。この垂直ガイド軸35に搬送アーム3
6が昇降及び旋回可能な状態で支持されている。搬送アーム36は、駆動モータ37によ
って垂直ガイド軸35に沿って昇降可能であるとともに、垂直ガイド軸35を中心に左右
に旋回可能である。メディア搬送機構31によってメディア排出口6に搬送されてきたメ
ディアは、このメディア排出口6から外部に取り出すことが可能である。
れた2つのメディアドライブ41が配置され、これらメディアドライブ41の下側にレー
ベルプリンタ11の後述するキャリッジ62(図4参照)が移動可能に配置されている。
メディアドライブ41は、メディアへのデータ書き込み位置とメディアの受け取り受け
渡しを行うメディア受け渡し位置との間を移動可能なメディアトレイ41aをそれぞれ有
している。
メディアの受け取り受け渡しを行うメディア受け渡し位置との間を移動可能なメディアト
レイ51を有している。
出されてメディア受け渡し位置にある状態及び下側のレーベルプリンタ11のメディアト
レイ51が奥側のレーベル印刷可能位置にある状態が示されている。また、レーベルプリ
ンタ11はインクジェットプリンタであり、インク供給機構71として各色(本実施形態
ではブラック、シアン、マゼンタ、イエロー、ライトシアン、ライトマゼンタの6色)の
インクカートリッジ12が用いられ、これらのインクカートリッジ12がカートリッジ装
着部14の各カートリッジホルダ13に前方から装着されている。
メディアスタッカ22の左右一対の枠板27,28の間には、メディア搬送機構31の搬
送アーム36が昇降可能な隙間が形成されている。また、これら上下のブランクメディア
スタッカ21と作成済みメディアスタッカ22との間には、メディア搬送機構31の搬送
アーム36が水平に旋回して、作成済みメディアスタッカ22の真上に位置できるように
隙間が開いている。さらに、メディアトレイ41aをメディアドライブ41に押し込むと
、メディア搬送機構31の搬送アーム36を下降させて、メディア受け渡し位置にあるメ
ディアトレイ51にアクセス可能となっている。したがって、搬送アーム36の昇降及び
左右への旋回の組み合わせ動作によって、メディアを各部に搬送することが可能とされて
いる。
るための廃棄用スタッカ52が配置されており、この廃棄用スタッカ52には、例えば3
0枚程度の廃棄用メディアMDが保管可能とされている。メディアトレイ51が廃棄用ス
タッカ52の上方のメディア受け渡し位置からデータ書き込み位置へ退避した状態でメデ
ィア搬送機構31の搬送アーム36により、廃棄用メディアMDを廃棄用スタッカ52に
供給可能となっている。
ッカ21、作成済みメディアスタッカ22、廃棄用スタッカ52、メディアドライブ41
のメディアトレイ41a及びレーベルプリンタ11のメディアトレイ51間を、メディア
搬送機構31の搬送アーム36によって搬送される。
ッド61を有するキャリッジ62を備えており、このキャリッジ62は、キャリッジモー
タの駆動力でキャリッジガイド軸に沿って水平方向に往復移動する(図示省略)。
4を有するインク供給機構71を備えている。このインク供給機構71は、縦型構造を有
しており、パブリッシャ1のベース72上に立設されて鉛直方向に配設されている。この
インク供給機構71には、可撓性を有するインク供給チューブ73の一端が接続されてお
り、このインク供給チューブ73の他端は、キャリッジ62に接続されている。
供給チューブ73を介してキャリッジ62に供給され、このキャリッジ62に設けられた
ダンパユニット及び背圧調整ユニット(図示省略)を経てインクジェットヘッド61に供
給されインクノズル(図示省略)から吐出される。
なお、インク供給機構71には、その上部に主部を配置するように加圧機構74が設け
られており、この加圧機構74は、圧縮空気を送り出してインクカートリッジ12内を加
圧し、インクカートリッジ12内のインクパックに貯留しているインクを送り出す。
ッドメンテナンス機構81が設けられている。
このヘッドメンテナンス機構81は、ホームポジションに配置されたキャリッジ62の
下面に露出するインクジェットヘッド61のインクノズルを覆うヘッドキャップ82と、
インクジェットヘッド61のヘッドクリーニング動作やインク充填動作によってヘッドキ
ャップ82に排出されたインクを吸引する廃インク吸引ポンプ83とを備えている。
たインクは、チューブ84を介して、廃インク吸収タンク85へ送り込まれる。
この廃インク吸収タンク85は、ケース86内に吸収材を配設したもので、その上面は
、複数の通気孔87を有するカバー88によって覆われている。
なお、ヘッドメンテナンス機構81の下方には、廃インク吸収タンク85の一部である
廃インク受け部89が設けられ、ヘッドメンテナンス機構81から滴下したインクを受け
止め、吸収材によって吸収するようになっている。
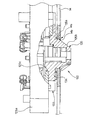
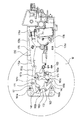
図5はメディア搬送機構を示す斜視図、図6はメディア搬送機構の一部の斜視図、図7
は搬送アームとタイミングベルトとの連結機構部分を示す斜視図である。
図5に示すように、メディア搬送機構31は、垂直に取り付けられているシャーシ32
を備え、ベース72に取り付けられている水平支持板部34とシャーシ32の天板33と
の間に、垂直ガイド軸35が取り付けられている。そして、この垂直ガイド軸35に搬送
アーム36が昇降可能かつ旋回可能な状態で支持されている。
7を備えており、この駆動モータ37の回転が、この駆動モータ37の出力軸に取り付け
たピニオン97及び伝達歯車98を介して駆動側プーリ101に伝達されるようになって
いる。駆動側プーリ101は、シャーシ32の上端近傍位置において、水平な回転軸を中
心として回転自在に支持されている。シャーシ32の下端近傍位置には、同じく水平な回
転軸を中心として回転自在で従動側プーリ103が支持されており、これら駆動側プーリ
101及び従動側プーリ103の間にタイミングベルト104が架け渡されている。この
タイミングベルト104の左右のベルト部分の一方には、図7に示すように、ベルトクリ
ップ112によって搬送アーム36の基部110が連結されている。
したがって、駆動モータ37を駆動すると、タイミングベルト104が上下方向に移動
し、そこに取り付けられている搬送アーム36が垂直ガイド軸35に沿って昇降する。
05を備えており、この駆動モータ105の出力軸にはピニオン(図示省略)が取り付け
られており、このピニオンの回転が、伝達歯車107を備えた減速歯車列を介して、扇形
の最終段歯車109に伝達されるようになっている。扇形の最終段歯車109は、垂直ガ
イド軸35を中心として左右に旋回可能である。また、この最終段歯車109には、搬送
アーム36の昇降機構の構成部品が組み付けられているシャーシ32が搭載されている。
駆動モータ105を駆動すると、扇形の最終段歯車109が左右に旋回するので、ここに
搭載されているシャーシ32が一体となって垂直ガイド軸35を中心として左右に旋回す
る。この結果、シャーシ32に搭載されている昇降機構によって保持されている搬送アー
ム36が垂直ガイド軸35を中心として左右に旋回する。
図8は図7に示した構成をその下方側から視た拡大斜視図である。
図7及び図8に示すように、搬送アーム36の基部110には、摺動軸111が鉛直方
向に沿って設けられており、この摺動軸111は、タイミングベルト104(図7参照)
を把持するベルトクリップ112の軸穴112aに摺動可能に挿通されている。これによ
り、ベルトクリップ112は、摺動軸111に沿って上下方向へ摺動可能である。
は、コイルばねである第1の引っ張りばね113の一端が接続されている。第1の引っ張
りばね113の他端は、搬送アーム36の基部110に形成されて係止片112bの上方
に配置された固定片115に接続されており、これにより、ベルトクリップ112は、第
1の引っ張りばね113によって上方へ付勢されている。
なお、ベルトクリップ112には、タイミングベルト104を挟んで固定する固定部1
12cが形成されている。
バー116は、ベルトクリップ112の側方における搬送アーム36の基部110の下面
に設けられた支持板部117に形成された挿通穴118に側方から挿通されており、この
支持板部117における支持箇所を支点として揺動可能とされている。この押圧レバー1
16には、その先端部に、第1の引っ張りばね113よりも付勢力の強いコイルばねから
なる第2の引っ張りばね119の一端が接続されており、この第2の引っ張りばね119
の他端部は、搬送アーム36の基部110に形成されて押圧レバー116の先端部の上方
に配置された固定片120に接続されている。これにより、押圧レバー116は、その先
端部が第2の引っ張りばね119によって上方へ付勢されている。また、押圧レバー11
6の先端部近傍における上方側には、基部110に形成された揺動規制片121が設けら
れており、第2の引っ張りばね119によって上方へ付勢されている押圧レバー116の
揺動が所定位置で規制されている。そして、ベルトクリップ112は、揺動規制片121
に当接して揺動が規制された押圧レバー116に対して隙間Sを設けた位置に配置されて
いる。
れると(図5参照)、タイミングベルト104に固定されているベルトクリップ112と
ともに搬送アーム36が一体となって昇降する。ここで、後述するメディアガイド133
、またはグリッピング機構(把持機構)130がメディアに当接し、搬送アーム36の下
方への負荷が大きくなると、搬送アーム36に対してベルトクリップ112のみが第1の
引っ張りばね113の付勢力に抗して下方へ移動する。また、ベルトクリップ112がタ
イミングベルト104により更に下方へ移動すると、ベルトクリップ112が押圧レバー
116に当接し、その後、搬送アーム36が多少撓んだ後、押圧レバー116が第2の引
っ張りばね119の付勢力に抗して支持板部117における支持箇所を支点として揺動す
る。
次に、搬送アーム36の内部機構について説明する。
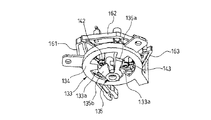
図9は、搬送アームの内部構造を示す斜視図、図10はメディアを把持した搬送アーム
の下面側から視た平面図、図11は搬送アームの把持部における断面図、図12は搬送ア
ームの把持部に設けられたメディアガイドの斜視図、図13は搬送アームの把持部に設け
られたメディアガイドの平面図、図14はグリッピング機構を説明するアームベースの平
面図、図15はグリッピング機構の把持爪部分の斜視図、図16はグリッピング機構の拡
大平面図、図17から図19は旋回板及び把持爪の動きを説明するそれぞれ平面図、図2
0は把持爪を説明する把持爪の断面図、図21は蹴落とし機構を示すアームベースの平面
図、図22は把持部を断面視した搬送アームの正面図、図23は蹴落とし機構の斜視図、
図24は蹴落とし機構に設けられた揺動機構部分の断面図、図25は蹴落とし機構に設け
られた揺動機構部分の平面図、図26及び図27は蹴落とし機構の動きを説明するそれぞ
れ概略平面図である。
、このアームベース125aの上に被せた同一輪郭形状のアームケース125bとを備え
ている。また、アームベース125aにはメディアMを把持するためのグリッピング機構
130、蹴落とし機構131及びメディア検出機構200が組み込まれており、これらグ
リッピング機構130、蹴落とし機構131及びメディア検出機構200がアームケース
125bによって覆い隠されている。
、メディアMを把持する把持部132であって、この把持部132には、メディアガイド
133が設けられている。
アMのピックアップ中心と一致されたもので、アームベース125aの下面側に固定され
る固定板部134の中心に、下方へ突出するガイド部135を有している。このガイド部
135は、メディアMの中心孔Maよりも僅かに小径に形成された円筒状の基端部135
aと、この基端部135aから下方へ向かって次第に窄まる円錐形状に形成されたガイド
面部135bとを有している。そして、このメディアガイド133は、メディアMに対し
て近接することにより、メディアMの中心孔Maに挿入され、メディアMの中心孔Maの
内周面Mbがガイド面部135bに接触すると、メディアMの中心位置がガイド面部13
5bによってメディアガイド133の中心位置に調心され、メディアMの中心孔Maが基
端部135aに案内されて、メディアMの中心孔Maに基端部135aが挿通される。
窓部133a内の空間で、グリッピング機構130の後述する3本の把持爪141〜14
3及び蹴落とし機構131のキックレバー182の作用片183が出没可能である。
(120°)間隔で配置された3本の円柱状の把持爪141〜143を備えており、これ
らの把持爪141〜143は、アームベース125aの先端部に形成された円形穴125
cから下方に垂直に突出され、それぞれメディアガイド133の窓部133aの内側に配
置されている。これら3本の把持爪141〜143は、メディアガイド133によって基
端部135aに案内されたメディアMの中心孔Maに挿入し、半径方向外方に押し広がり
、メディアガイド133の窓部133aから突出することにより、メディアMの中心孔M
aの内周面Mbに当接してメディアMを把持する。
けられている。各支持ピン151〜153は、アームベース125aの円形穴125cを
貫通してその上側に延び、アームベース125aの上面に配置されている3枚の旋回板1
61〜163にそれぞれ固定されている。アームベース125aには、その円形穴125
cを取り囲む状態で同一円上に等角度間隔で旋回中心軸171〜173が垂直に固定され
ており、各旋回板161〜163は、これらの旋回中心軸171〜173を中心として旋
回可能な状態で支持されている。
沿って、その円形穴125cのほぼ円周方向に沿って前方(上面視反時計回り方向)側に
延びる前方腕部161a〜163aと、円形穴125cのほぼ円周方向に沿って後方(上
面視時計回り方向)側に延びる後方腕部161b〜163bと、旋回中心から円形穴12
5cの内側に突出している支持腕161c〜163cとを備えている。支持腕161c〜
163cの先端部の裏面に、それぞれ支持ピン151〜153が垂直に固定されている。
が形成されており、この長孔161dには、旋回板163の前方腕部163aの後端で下
方へ突設されたスライドピン163fがスライド可能に挿通されている。
また、旋回板163の後方腕部163bの先端には、円形穴125cの略径方向に沿う
スライド面163eが形成されており、このスライド面163eには、旋回板162の前
方腕部162aの前端部が接触しないように設定されている。また、旋回板162の後方
腕部162bの先端には、円形穴125cの略径方向に沿うスライド面162eが形成さ
れており、このスライド面162eには、旋回板161の前方腕部161aの前端部が摺
接可能とされている。ここで、旋回板161の長穴161d及び旋回板162,163の
スライド面162e,163eは、各旋回板161〜163が同一方向に旋回するように
設定された凹状の湾曲形状に形成されている。
62の後方腕部162bと旋回板163の後方腕部163bとの間及び旋回板163の後
方腕部163bと旋回板161の後方腕部161bとの間には、それぞれ引っ張りコイル
ばね(付勢部材)174が架け渡されている。そして、これら引っ張りコイルばね174
の引っ張り力によって、旋回板161〜163はガタ付くことなく保持されると共に、各
旋回板161〜163に対して図16において矢印R1で示す方向(把持爪141〜14
3を広げる方向)の付勢力が加わっている。
付けられている把持爪141〜143の外接円は、メディアMの中心孔Maの内径より大
きな径となっている。この状態において、一枚の旋回板161を矢印R2で示す方向に旋
回すると、これに連動して、他の二枚の旋回板162,163も同一方向に旋回する。こ
の結果、旋回板161〜163の支持腕161c〜163cが円形穴125cの中心に向
けて移動し、これらの先端部に取り付けられている把持爪141〜143がメディアMの
中心孔Maに挿入可能な状態まで狭められる。
この状態で把持爪141〜143をメディアMの中心孔Maに挿入し、しかる後に、旋
回板161〜163を逆方向R1に旋回すると、把持爪141〜143が半径方向の外側
に押し広げられる。この結果、それら把持爪141〜143がメディアMの中心孔Maの
内周面Mbに押し付けられ、メディアMが把持された状態になる。
腕161gが形成されている。この操作腕161gの先端部には、リンク175の一方の
腕部175aの先端が回転自在の状態で連結されている。リンク175は、その中間部を
中心としてアームベース125aに回動可能に支持されており、反対側の腕部175bの
先端部は電磁ソレノイド176の作動ロッド176aに連結されている。電磁ソレノイド
176は、オフ状態において、その作動ロッド176aが内蔵のばねのばね力によって突
出状態とされる。
ばね力に逆らって引き込まれ、リンク175が旋回し、旋回板161がR2方向に旋回す
る。すると、図17に示すように、旋回板162の後方腕部162bのスライド面162
eが旋回板161の前方腕部161aの先端に摺接するとともに、旋回板161の後方腕
部161bの長穴161dの内面が旋回板163の前方腕部163aのスライドピン16
3fに摺接する。これにより、旋回板162のスライド面162eが旋回板161の前方
腕部161aの先端に摺接して円形穴125cの径方向外方へスライドすることにより旋
回板162がR2方向に旋回し、また、旋回板163の前方腕部163aのスライドピン
163fに旋回板161の後方腕部161bの長穴161dの内面が摺接して旋回板16
3の前方腕部163aが円形穴125cの中心方向へスライドすることにより旋回板16
3もR2方向に旋回する。
旋回力が他の旋回板162,163に伝達され、図18に示すように、旋回板162,1
63もR2方向に旋回し、旋回板161〜163の支持腕161c〜163cに設けられ
た把持爪141〜143がメディアMの中心孔Maよりも十分に小さな外接円内に配置さ
れ、メディアMの中心孔Maに挿入可能な状態まで狭められる。
のばねのばね力によって突出され、リンク175が旋回する。すると、リンク175の旋
回運動が旋回板161に伝わり、この旋回板161がR1方向に旋回する。これに連動し
て他の二枚の旋回板162,163は、引っ張りコイルばね174の引っ張り力によって
、それぞれの後方腕部162b,163bが円形穴125cの中心方向へ引っ張られ、こ
れにより、これら旋回板162,163も旋回板161と同様にR1方向に旋回する。こ
の結果、図19に示すように、把持爪141〜143が押し広げられ、把持爪141〜1
43がメディアMの中心孔Maの内周面Mbに押し付けられ、メディアMが把持された状
態になる。
の引っ張り力によってR1方向に独立して旋回されるので、各把持爪141〜143も、
それぞれ独立して半径方向外方へ移動してメディアMの中心孔Maの内周面Mbへ押し付
けられることとなる。
から突出した円柱状のピン141a〜143aと、このピン141a〜143aを同心状
態で取り囲んでいるゴムなどからなる弾性円筒141b〜143bとを備えている。そし
て、これら3本の把持爪141〜143は、下方への突出長さlの寸法が、把持するメデ
ィアMの厚さt1の寸法以下とされている。この突出長さlは、メディアMの中心孔Ma
の内周面Mbの厚さt2以上で環状突起部Mcの高さを含んだメディアMの厚さt1以下
が望ましい。これにより、厚さ方向に積層状態のメディアMを把持する際に、把持爪14
1〜143が2枚目のメディアMの内周面Mbに接触することなく、最上部である1枚目
のメディアMだけを把持するようになっている。
蹴落とし機構131は、中間部が連結点181でアームベース125aに回動可能に支持
されたキックレバー182を備えている。このキックレバー182は、連結点181を境
に、先端側が先端レバー部182a、後端側が後端レバー部182bとされている。先端
レバー部182aには、先端で下方に屈曲され、さらに側方にL字状に屈曲された作用片
183を有しており、この作用片183が、把持部132のメディアガイド133内に配
置されている。
ディアMを把持した状態で、そのメディアMの下方側で水平に配置されている。具体的に
は、厚さ方向に積層状態のメディアMの2枚目のメディアMの位置に配置されている。
そして、このキックレバー182は、その連結点181で図21中R3方向へ揺動する
と、作用片183がメディアガイド133の窓部133aから側方へ突出し、把持爪14
1〜143で把持する最上部のメディアMの下方側の2枚目のメディアMの中心孔Maの
内周面Mbに当接する。また、この状態からキックレバー182が逆のR4方向へ揺動す
ると、作用片183がメディアガイド133内に引き込まれる。
この揺動機構190は、複合クラッチ歯車191、鉛直複合伝達歯車192、水平複合伝
達歯車193及びラック194を備えている。
ラック194は、図5に示すように、メディア搬送機構31を構成するシャーシ32に
、垂直ガイド軸35と平行に垂直に支持されている。このラック194には、水平方向の
軸193aを中心として回転可能にアームベース125aに支持された水平複合伝達歯車
193のピニオン193bが噛み合わされており、搬送アーム36が昇降されることによ
り、ラック194に噛み合わされたピニオン193bを有する水平複合伝達歯車193が
回転する。
3cは、鉛直方向の軸192aを中心として回転可能にアームベース125aに支持され
た鉛直複合伝達歯車192のねじ歯車192bに噛み合わされている。これにより、水平
複合伝達歯車193が回転されると、互いに噛み合わされたねじ歯車192b,193c
によって水平の軸193aを有する水平複合伝達歯車193の回転が鉛直の軸192aを
有する鉛直複合伝達歯車192に伝達され、この鉛直複合伝達歯車192が回転する。
鉛直複合伝達歯車192には、平歯車192cが設けられており、この平歯車192c
は、鉛直方向の軸191aを中心として回動可能にアームベース125aに支持された複
合クラッチ歯車191の平歯車191bに噛み合わされている。これにより、鉛直複合伝
達歯車192が回転されると、互いに噛み合わされた平歯車191b,192cによって
鉛直複合伝達歯車192の回転が複合クラッチ歯車191に伝達され、この複合クラッチ
歯車191が回転する。
相対的に回転可能とされた間欠歯車191cを備えている。また、この平歯車191bと
間欠歯車191cとの間には、クラッチ機構195が設けられている。平歯車191bは
、軸191aが挿通された円筒軸191dを有しており、この円筒軸191dは、間欠歯
車191cに形成された円筒軸191eに挿通されている。
図25に示すように、間欠歯車191cは、周面の一部に複数の歯196aからなる歯
列196を有しており、この歯列196は、鉛直複合伝達歯車192の平歯車192cと
歯合可能とされている。
軸191eの周囲に巻回されたねじりコイルばね197を有している。平歯車191bが
鉛直複合伝達歯車192の平歯車192cによって、図25において上面視反時計回りの
R5方向へ回転されると、このねじりコイルばね197により発生する摩擦力によって、
間欠歯車191cを平歯車191bと供回りさせる。これにより、間欠歯車191cは、
歯列196が鉛直複合伝達歯車192の平歯車192cに歯合し、平歯車191bととも
にR5方向へ回転される。これとは逆に、平歯車191bが鉛直複合伝達歯車192の平
歯車192cによって、図25において上面視時計回りのR6方向へ回転されると、ねじ
りコイルばね197により発生する摩擦力によって、間欠歯車191cを平歯車191b
と供回りさせる。これにより、間欠歯車191cは、歯列196が鉛直複合伝達歯車19
2の平歯車192cに歯合し、平歯車191bとともにR6方向へ回転される。
には、キックレバー182の後端レバー部182bの後端近傍で下方へ突出するカムピン
182cが摺動可能に配置されている。カム穴198は、上面視時計回りに向かって中心
側から外周側に変化する経路を有している。これにより、図26に示す状態で、間欠歯車
191cが上面視反時計回りのR5方向へ回転すると、カム穴198内のカムピン182
cが外周側へ変位し、これにより、図27に示すように、キックレバー182が連結点1
81を中心としてR3方向へ揺動し、作用片183がメディアガイド133の外方へ突出
される。また、この状態で、間欠歯車191cが上面視時計回りのR6方向へ回転すると
、カム穴198内のカムピン182cが内周側へ変位し、これにより、図26に示すよう
に、キックレバー182が連結点181を中心としてR4方向へ揺動し、作用片183が
メディアガイド133の内方へ引き込まれる。
合クラッチ歯車191がR5方向に回転し始め、さらに搬送アーム36が上昇して複合ク
ラッチ歯車191が図26の状態から図27の状態へ所定量(45°程度)回転する間に
、キックレバー182がR3(図22参照)方向へ揺動し、キックレバー182の作用片
183が2枚目のメディアMを蹴落とすようになっている。そして、搬送アーム36が下
降するときには、複合クラッチ歯車191がR6方向に回転して、それによりキックレバ
ー182がR4(図21参照)方向へ揺動し、作用片183が図26に示すようにメディ
アガイド133内に引き込まれる。その状態でさらに搬送アーム36が下降しても、複合
クラッチ歯車191の間欠歯車191cは、鉛直複合伝達歯車192の平歯車192cに
よってR6方向へ所定量(45°程度)回転された後は、平歯車192cから歯列196
が外れているため、平歯車191bに対して空回りする。
方へ屈曲されてアームベース125aの下面側へ突出する検出レバー201と、この検出
レバー201の側方に設けられた検出器202とを有している。そして、このメディア検
出機構200では、搬送アーム36が下降してメディアMの上面が検出レバー201の先
端に当接することにより、検出レバー201が上方へ揺動し、この検出レバー201が検
出器202の検出領域から外れると、検出器202がオンに切り替わり、この検出器20
2からの検出信号からメディアMへの近接状態を検出することができる。
作を説明する。
例えば、ブランクメディアスタッカ21から、積層状態で収納されているメディアMの
最上部のメディアMを把持して持ち上げる場合について説明する。
まず、搬送アーム36がブランクメディアスタッカ21の真上の所定高さ位置に配置さ
れた状態で、グリッピング機構130の電磁ソレノイド176をオンする。この状態では
、電磁ソレノイド176の作動ロッド176aが内蔵されたばねに逆らって引き込まれ、
この動きがリンク175を介して旋回板161に伝達され、この旋回板161が図16に
おける矢印R2方向に旋回した配置となる。これにより、残りの旋回板162,163も
同一方向に旋回した配置となり、これら3枚の旋回板161〜163の支持腕161c〜
163cの先端に取り付けられている把持爪141〜143が相互に接近した位置に移動
されて、メディアMの中心孔Maに挿入可能な状態に窄まった状態となる。
降動作が開始される。搬送アーム36が下降して最上部のメディアMに接近すると、把持
部132のメディアガイド133がメディアMの中心孔Maに挿入される。ここで、ブラ
ンクメディアスタッカ21内のメディアMの中心が、把持部132の中心に対してずれて
いたとしても、メディアMの中心孔Maの内周面Mbが円錐形状のガイド面部135bに
接触することにより、メディアMの中心位置がガイド面部135bによってメディアガイ
ド133の中心位置に調心され、メディアMの中心孔Maが基端部135aに案内され、
メディアMの中心孔Maに基端部135aが挿通される。つまり、把持するメディアMの
中心がピックアップ中心である把持部132の中心に位置決めされる。
ー201の先端がメディアMの表面に当たると、検出レバー201が搬送アーム36の下
降に伴って相対的に上方へ揺動し、検出レバー201が検出器202の検出領域から外れ
、検出器202がオンに切り替わり、メディアMへの近接状態が検出される。その後、搬
送アーム36を予め定めた量だけ下降させて停止させ、搬送アーム36に組み込まれてい
るグリッピング機構130の把持爪141〜143をメディアMの中心孔Maに挿入した
状態とする。
るが、このように積層されたメディアMは、上下のメディアMと密着していることにより
、貼り付き力が生じている場合がある。
したがって、最上部のメディアMに2枚目のメディアMが貼り付いている場合、把持爪
141〜143をメディアMの中心孔Maの内周面Mbに当接させただけでは、最上部の
メディアMを側方へずらして位置決めするのが困難である。
このため、メディア搬送機構31では、最上部のメディアMに対して上方側から所定の
押圧力を作用させることにより、メディアガイド133のガイド面部135bによるメデ
ィアMの側方へ向かう押圧力を作用させて、メディアMを確実に側方へ移動させて位置決
めするようになっている。
について説明する。
図28は搬送アームのベルトクリップの下降ストロークとメディアにかかる荷重との関
係を示すグラフ図である。
まず、搬送アーム36の把持部132が最上部のメディアMに接触した状態(図28に
おけるAの状態)から駆動モータ37の駆動が継続されると、タイミングベルト104に
固定されたベルトクリップ112が弱いばね力の第1の引っ張りばね113の付勢力に抗
して下方へ引き下げられ、ベルトクリップ112が隙間Sの寸法分下降し、その後、ベル
トクリップ112が押圧レバー116に当接する(図28におけるBの状態)。これによ
り、最上部のメディアMには、把持部132が接触してからベルトクリップ112が押圧
レバー116に当接するまで、弱いばね力の第1の引っ張りばね113の付勢力からなる
第1の弾性押圧力が付与される(図28におけるA〜Bの領域)。
。このとき、ベルトクリップ112は押圧レバー116に当接していることより、ベルト
クリップ112の引き下げ力は、搬送アーム36に伝わることにより、この搬送アーム3
6が撓み、その撓み力が押圧力として最上部のメディアMに付与される(図28における
B〜Cの領域)。
駆動モータ37の駆動がさらに継続されてベルトクリップ112が下降されることによ
り、搬送アーム36の撓み力が強いばね力の第2の引っ張りばね119よりも大きくなる
と(図28におけるCの状態)、押圧レバー116が第2の引っ張りばね119の付勢力
に抗して支持板部117における支持箇所を支点として揺動する。これにより、最上部の
メディアMには、第1の引っ張りばね113の付勢力及び搬送アーム36の撓み力に第2
の引っ張りばね119の付勢力が加わった第2の弾性押圧力が付与される(図28におけ
るC〜Eの領域)。
ね113の付勢力及び搬送アーム36の撓み力に第2の引っ張りばね119の付勢力が加
わった押圧力がメディアMに付与される領域(図28におけるC〜Eの領域)の適切な位
置(例えば、図28におけるDの位置)で駆動モータ37を停止させる。
このようにすると、ブランクメディアスタッカ21内の積層状態のメディアMには、そ
の最上部のメディアMに、適当な荷重(約10N)を付与することができ、これにより、
2枚目のメディアMとの貼り付きに関わらず、メディアMをメディアガイド133のガイ
ド面部135bによって確実に側方へ移動させて位置決めすることができる。
また、荷重を付与することにより、メディアMの中心位置がずれていたとしても、メデ
ィアガイド133を確実にメディアMの中心孔Maに挿入して位置決めすることができる
。
送アーム36の撓み力を生じさせる際のベルトクリップ112のストローク(図28にお
けるB〜Cの領域)を短くして必要な荷重を得ることができる。
ディアトレイ41a,51からメディアMを持ち上げる場合は、搬送アーム36の把持部
132がメディアMに接触してからベルトクリップ112が押圧レバー116に当接する
までの弱いばね力の第1の引っ張りばね113の付勢力からなる第1の弾性押圧力が付与
される状態(図28におけるA〜Bの領域)でグリッピング機構130によってメディア
Mを把持すれば良く、このようにすれば、メディアMの取り出しの際にメディアトレイ4
1a,51にかかる荷重を極力小さくすることができ、メディアトレイ41a,51への
荷重による過負荷の影響を抑えることができる。
の弾性押圧力を付与した状態で、メディアMの中心孔Maに挿入された把持爪141〜1
43を中心孔Maの径方向に押し広げて中心孔Maの内周面Mbに押し付ける。
具体的には、まず、電磁ソレノイド176をオフに切り替え、その作動ロッド176a
が、ばねのばね力によって突出すると、作動ロッド176aに、リンク175を介して連
結されている旋回板161がR1方向に旋回する。これに連動して他の二枚の旋回板16
2,163が、引っ張りコイルばね174の引っ張り力によって、旋回板161と同様に
R1方向に旋回する。この結果、把持爪141〜143が押し広げられ、把持爪141〜
143がメディアMの中心孔Maの内周面Mbに押し付けられ、メディアMが把持された
状態になる。
の引っ張り力によってR1方向に独立して旋回されるので、各把持爪141〜143も、
それぞれ独立して半径方向外方に移動してメディアMの中心孔Maの内周面Mbへ押し付
けられる。
したがって、万一、最上部のメディアMの中心位置がピックアップ中心からずれていた
としても、各把持爪141〜143が、それぞれ独立して外周側へ広がるので、メディア
Mの中心孔Maの内周面Mbに全ての把持爪141〜143が当接し、把持不良などが確
実に防止される。
厚さ寸法以下であるため、最上部のメディアMに対して2枚目のメディアMの中心位置が
ずれていたとしても、把持爪141〜143が2枚目のメディアMの中心孔Maの縁部な
どに接触して把持不良を生じるような不具合も防止される。
状態のままで、搬送アーム36を上昇させ、把持したメディアMを持ち上げる。このとき
、把持した最上部のメディアMは、全ての把持爪141〜143によって確実に把持され
ているので、把持不良なく円滑に持ち上げられる。
1のキックレバー182が連結点181を中心として図21中矢印R3方向へ揺動し、作
用片183がメディアガイド133の外方へ突出される。
これにより、万一、持ち上げるメディアMに貼り付いて2枚目のメディアMが持ち上げ
られそうになっても、キックレバー192の作用片183が2枚目のメディアMの中心孔
Maの内周面Mbに当接することにより、2枚目のメディアMを確実に蹴落として最上部
のメディアMだけを持ち上げることができる。
構130によって把持して持ち上げる最上部のメディアMの直下のメディアMを蹴落とす
蹴落とし機構131を備えているため、把持対象の1枚のメディアMの直下(2枚目)の
メディアMが密着して貼り付いていたとしても、この直下のメディアMを蹴落として、最
上部のメディアMだけを、把持不良なく持ち上げて搬送することができる。
能なキックレバー182を備えているので、最上部のメディアMを把持して持ち上げる際
に、キックレバー182を揺動させて作用片183を突出させることにより、把持対象の
メディアMに密着して貼り付いていた直下のメディアMを容易に蹴落とすことができる。
しかも、搬送アーム36の昇降によってキックレバー182を揺動させる揺動機構19
0を備えているので、専用の駆動機構を設けることなく、キックレバー182を揺動させ
て把持対象のメディアMの直下のメディアMを蹴落とすことができる。
歯合したピニオン193bとを有し、搬送アーム36の昇降運動によって回転されるピニ
オン193bの回転力によってキックレバー182を揺動させるので、搬送アーム36を
昇降させることにより、容易にキックレバー182を揺動させて作用片183を径方向外
方へ出没させることができる。
クラッチ歯車191を備えるので、搬送アーム36を上昇させて把持対象のメディアMを
持ち上げるときは、搬送アーム36の上昇の際に所定角度だけ回転した複合クラッチ歯車
191によってキックレバー182が所定量だけ揺動され、これにより、作用片183を
径方向外方に所定量だけ突出させて把持対象の直下のメディアMを蹴落とすことができる
。
るために搬送アーム36を下降させるときは、搬送アーム36の下降の際に所定角度だけ
逆回転した複合クラッチ歯車191によってキックレバー182が所定量だけ逆方向へ揺
動され、これにより、作用片183を引き込むことができ、把持対象のメディアMや載置
するメディアMへの作用片183の干渉を防止することができる。
容されたメディアMを確実に把持することが可能なメディア搬送機構31を備えているの
で、処理対象の所定のメディアMを確実に搬送することができ、処理の信頼性の高い処理
装置とすることができる。
、130…グリッピング機構(把持機構)、131…蹴落とし機構、182…キックレバ
ー、183…作用片、190…揺動機構、191…複合クラッチ歯車(クラッチ歯車)、
193b…ピニオン、194…ラック、M…メディア、Ma…中心孔。
Claims (3)
- 移動可能な搬送アームに、積層状態の円板状のメディアの最上部のメディアを把持する把持機構が設けられたメディア搬送機構であって、
前記搬送アームは、前記把持機構によって把持された前記最上部のメディアの直下のメディアに当接して前記直下のメディアを前記最上部のメディアに対して移動させる作用片を有する移動可能なレバーと、前記最上部のメディアに押圧力を付与する把持部とを備え、
前記把持部は、前記最上部のメディアを把持するときに前記最上部のメディアを押圧した状態で、当該メディアの中心孔の内周面を把持し、
前記レバーは、前記搬送アームの上昇時には、前記最上部のメディアが前記把持部の押圧から解放された状態で、前記作用片が前記最上部のメディアの前記直下のメディアの中心孔の内周面に当接して径方向に移動させる位置となり、前記搬送アームの下降時には、前記作用片が前記最上部のメディアの前記直下のメディアに当接しない位置となるように移動されることを特徴とするメディア搬送機構。 - 請求項1に記載のメディア搬送機構であって、
前記レバーは、前記搬送アームの移動によって移動されることを特徴とするメディア搬送機構。 - 請求項1または2に記載のメディア搬送機構を備えていることを特徴とするメディア処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008252582A JP5146233B2 (ja) | 2008-09-30 | 2008-09-30 | メディア搬送機構及びそれを備えたメディア処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008252582A JP5146233B2 (ja) | 2008-09-30 | 2008-09-30 | メディア搬送機構及びそれを備えたメディア処理装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007099879A Division JP4375425B2 (ja) | 2007-04-05 | 2007-04-05 | メディア搬送機構、それを備えたメディア処理装置、及びメディア搬送方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009026457A JP2009026457A (ja) | 2009-02-05 |
| JP2009026457A5 JP2009026457A5 (ja) | 2010-05-13 |
| JP5146233B2 true JP5146233B2 (ja) | 2013-02-20 |
Family
ID=40398116
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008252582A Expired - Fee Related JP5146233B2 (ja) | 2008-09-30 | 2008-09-30 | メディア搬送機構及びそれを備えたメディア処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5146233B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5863266B2 (ja) | 2011-04-12 | 2016-02-16 | メルクパフォーマンスマテリアルズIp合同会社 | シロキサン樹脂含有塗布組成物 |
| JP5874294B2 (ja) | 2011-10-13 | 2016-03-02 | セイコーエプソン株式会社 | メディア搬送機構、メディア搬送機構の制御方法およびメディア処理装置 |
| JP6172929B2 (ja) * | 2012-12-14 | 2017-08-02 | キヤノン株式会社 | ロボット装置及び部品の組立て方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62176131U (ja) * | 1986-04-30 | 1987-11-09 | ||
| JPH0772017B2 (ja) * | 1986-12-22 | 1995-08-02 | 株式会社日立製作所 | 積み重ね部品の分離方法 |
| JPH0929506A (ja) * | 1995-07-11 | 1997-02-04 | Showa Alum Corp | 旋盤への磁気ディスク基板用ブランクの供給装置 |
| JP3852367B2 (ja) * | 2002-05-14 | 2006-11-29 | ティアック株式会社 | ディスク装置 |
| JP4839621B2 (ja) * | 2005-01-19 | 2011-12-21 | ティアック株式会社 | ディスク処理装置 |
-
2008
- 2008-09-30 JP JP2008252582A patent/JP5146233B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009026457A (ja) | 2009-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4375425B2 (ja) | メディア搬送機構、それを備えたメディア処理装置、及びメディア搬送方法 | |
| JP4375426B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5056127B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP4882864B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP4918888B2 (ja) | メディア処理装置及びその制御方法 | |
| JP5146233B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5532080B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5018720B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5644817B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5408297B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5920425B2 (ja) | メディア搬送機構及びそれを備えたメディア処理装置 | |
| JP5228874B2 (ja) | メディア搬送機構及びメディア処理装置 | |
| JP2010146684A (ja) | 媒体搬送機構及び媒体処理装置 | |
| JP4962154B2 (ja) | メディア受渡機構及びそれを備えたメディア処理装置 | |
| JP4930221B2 (ja) | メディア搬送機構の制御方法及びメディア処理装置 | |
| JP2009015928A (ja) | メディア搬送機構の制御方法、メディア搬送機構及びメディア処理装置 | |
| JP2009176377A (ja) | メディア処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100330 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111214 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120928 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20121009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5146233 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |