JP5140157B2 - プランジャを移動する空動シリンダ装置を備える電子部品、特にicの取扱装置 - Google Patents
プランジャを移動する空動シリンダ装置を備える電子部品、特にicの取扱装置 Download PDFInfo
- Publication number
- JP5140157B2 JP5140157B2 JP2010522269A JP2010522269A JP5140157B2 JP 5140157 B2 JP5140157 B2 JP 5140157B2 JP 2010522269 A JP2010522269 A JP 2010522269A JP 2010522269 A JP2010522269 A JP 2010522269A JP 5140157 B2 JP5140157 B2 JP 5140157B2
- Authority
- JP
- Japan
- Prior art keywords
- pneumatic cylinder
- electronic component
- plunger
- pneumatic
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/26—Testing of individual semiconductor devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2893—Handling, conveying or loading, e.g. belts, boats, vacuum fingers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
Description
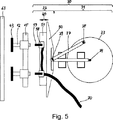
その場合に、空動シリンダ58のピストンロッド59が、プランジャ12の後端61を押圧することにより、図7に示す前方の接触位置にプランジャ12が移動される。その場合に、予め決められた長さだけ空動シリンダ58のピストンロッド59が引き出される。空動シリンダ58に対するピストンロッド59を引出し位置に維持することができる。従って、各試験工程後にピストンロッド59を引き込んで、それぞれ新しい試験工程前に再び引き出すことは、不要である。各空動シリンダ58を個別に駆動できるので、各空動シリンダ58を作動し又は非作動状態に維持することは容易である。更に、空動シリンダ58は、接触させる際の誤差を補償することが可能である。接点ソケット又は電子部品の接点位置が、移動方向に互いにずれると、対応するピストンロッド59は、より多い距離又はより少ない距離だけ自動的に移動距離を戻して、電子部品と接点ソケットとの間に実質的に同一の接触圧力を保持することができる。また、例えば、操作を停止する接点ソケット64があれば、接触すべき接点ソケット64に対して作動すべき所望の空動シリンダ58を選択することができる。この場合に、非作動のピストンロッド59は、引込み状態に維持されるので、対応するプランジャ12は、接触位置に移動されない。
Claims (6)
- 試験装置の接触装置に対向する位置に試験すべき複数の電子部品(43)を移送する少なくとも1つの移送ユニットと、
対応する電子部品(43)を保持しかつ対応する接触装置に電子部品(43)を接触させる前方の接触位置に軸方向に移動可能に移送ユニット上に配置された複数のプランジャ(12)と、
複数のプランジャ(12)を移動する操作装置(30)とを備える電子部品の取扱装置において、
操作装置(30)は、複数のプランジャ(12)に対して接近分離可能な複数の空動シリンダ(58)を設けた空動シリンダ装置(32)と、
プランジャ(12)の軸方向にかつプランジャ(12)に対して進退自在に空動シリンダ装置(32)を移動させて移送ユニットから離間する方向にプランジャ(12)を移動する空動シリンダ移動装置と、
複数の空圧導管(66,67)を介して対応する空動シリンダ(58)に連絡される複数の制御弁(69)とを備え、
各制御弁(69)を開放し又は閉鎖することにより、各空動シリンダ(58)又は空動シリンダ(58)群を個別に作動して、選択されたプランジャ(12)のみを接触位置に移動することを特徴とする電子部品の取扱装置。 - 空動シリンダ移動装置は、駆動装置(35)と、駆動装置(35)により回転されるクランク(33)と、クランク(33)に偏心して軸承された少なくとも1つのクランクロッド(37)とを有するクランク装置(31)を備え、
空動シリンダ装置(32)に駆動連結されるクランクロッドは、空動シリンダ装置(32)をプランジャ(12)の軸方向に移動させる請求項1に記載の取扱装置。 - 空動シリンダ装置(32)は、クランクロッドで駆動される請求項1に記載の取扱装置。
- 空動シリンダ装置(32)は、支持板連結体(50)と、支持板連結体(50)に固定されたシリンダ支持板(51)とを有し、
支持板連結体(50)は、ガイドロッド(54)に接して移動可能に案内され、
シリンダ支持板(51)に空動シリンダ(58)を固定した請求項1〜3のいずれか1項に記載の取扱装置。 - 移送ユニットの各プランジャ(12)に空動シリンダ(58)を対向させた請求項1〜4のいずれか1項に記載の取扱装置。
- 空動シリンダ(58)は、シリンダハウジングと、シリンダハウジング内に保持されるピストンロッド(59)とを有する短行程シリンダであり、
ピストンロッドは、空気圧によりシリンダハウジング内に軽く挿入されかつ保持され、
シリンダハウジング内への挿入路の少なくとも最初の導入路でのピストンロッド(59)の挿入力は、実質的に一定に保持される請求項1〜5のいずれか1項に記載の取扱装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007047678.9 | 2007-10-05 | ||
| DE102007047678A DE102007047678B4 (de) | 2007-10-05 | 2007-10-05 | Handhabungsvorrichtung für elektronische Bauelemente, insbesondere IC's, mit Pneumatikzylinderbewegungseinrichtung zum Verschieben von Plungern |
| PCT/EP2008/008152 WO2009046882A2 (de) | 2007-10-05 | 2008-09-25 | Handhabungsvorrichtung für elektronische bauelemente, insbesondere ic's, mit pneumatikzylinderbewegungseinrichtung zum verschieben von plungern |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010537209A JP2010537209A (ja) | 2010-12-02 |
| JP5140157B2 true JP5140157B2 (ja) | 2013-02-06 |
Family
ID=40451035
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010522269A Expired - Fee Related JP5140157B2 (ja) | 2007-10-05 | 2008-09-25 | プランジャを移動する空動シリンダ装置を備える電子部品、特にicの取扱装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8684168B2 (ja) |
| EP (1) | EP2195671B1 (ja) |
| JP (1) | JP5140157B2 (ja) |
| KR (1) | KR101203770B1 (ja) |
| CN (1) | CN101611325B (ja) |
| AT (1) | ATE495457T1 (ja) |
| DE (2) | DE102007047678B4 (ja) |
| MY (1) | MY147809A (ja) |
| WO (1) | WO2009046882A2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013117247A1 (en) * | 2012-02-07 | 2013-08-15 | Ismeca Semiconductor Holding Sa | Pusher |
| CN103630827B (zh) * | 2013-11-27 | 2016-07-06 | 杭州友旺电子有限公司 | 集成电路自动测试装置 |
| US11027931B1 (en) * | 2020-02-01 | 2021-06-08 | Blockwise Engineering Llc | Marker band locator system |
| US11498207B2 (en) * | 2021-01-08 | 2022-11-15 | Teradyne, Inc. | Test head manipulator configured to address uncontrolled test head rotation |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3881362A (en) * | 1973-12-20 | 1975-05-06 | Stelron Cam Co | Adjustable X and Y axis controlled movement mechanism |
| US4370092A (en) * | 1980-09-22 | 1983-01-25 | Healy Francis L | Parts handling machine |
| EP0175642B1 (de) * | 1984-09-18 | 1990-10-10 | H. Obrist & Co. AG | Verfahren und Vorrichtung zum Herstellen eines Formkörpers aus Kunststoffmaterial |
| JPH0664180U (ja) * | 1993-02-17 | 1994-09-09 | 株式会社アドバンテスト | Icハンドラにおける搬送装置 |
| US5456570A (en) * | 1993-04-19 | 1995-10-10 | Bill Davis Engineering, Inc. | Rotary placer |
| US5330043A (en) * | 1993-05-25 | 1994-07-19 | Delta Design, Inc. | Transfer apparatus and method for testing facility |
| US5649804A (en) * | 1995-05-12 | 1997-07-22 | Schychuck; James | Pick and place machine |
| JPH0989983A (ja) * | 1995-09-25 | 1997-04-04 | Ando Electric Co Ltd | Icの接触圧をデータで変えるic搬送装置 |
| US6168009B1 (en) * | 1995-12-28 | 2001-01-02 | Fuji Machine Mfg. Co. Ltd. | Apparatus for positioning electronic component holder head and apparatus for transferring electronic component |
| JP2930565B2 (ja) * | 1996-10-05 | 1999-08-03 | 三星電子株式会社 | サーボモータを用いた半導体チップパッケージのローディング及びアンローディング装置 |
| US6031384A (en) * | 1996-12-25 | 2000-02-29 | Advantest Corporation | IC testing method and apparatus |
| JP3583883B2 (ja) * | 1997-01-24 | 2004-11-04 | 日本エレクトロプレイテイング・エンジニヤース株式会社 | 自動ウェーハめっき装置 |
| JPH10227834A (ja) * | 1997-02-17 | 1998-08-25 | Ando Electric Co Ltd | Icのicソケットへの接触機構 |
| JPH10329944A (ja) * | 1997-05-28 | 1998-12-15 | Advantest Corp | 直線可動装置 |
| NL1006370C2 (nl) * | 1997-06-20 | 1998-12-22 | Kloeckner Haensel Tevopharm | Transportinrichting voor het versnellen van een reeks producten. |
| JP2001208797A (ja) * | 2000-01-28 | 2001-08-03 | Nec Machinery Corp | Ic試験装置 |
| JP2003225878A (ja) * | 2002-02-04 | 2003-08-12 | Smc Corp | 吸着ユニット |
| US6942086B2 (en) * | 2002-11-22 | 2005-09-13 | The Procter & Gamble Company | Transfer apparatus for transferring a workpiece from a moving anvil to a moving carrier |
| MX2007003195A (es) * | 2004-09-17 | 2007-05-16 | Indag Gmbh | Aparato para limentar bolsas y sus boquillas surtidoras respectivas a una maquina giratoria para el procesamiento de las mismas y metodo relativo. |
| WO2006059360A1 (ja) * | 2004-11-30 | 2006-06-08 | Advantest Corporation | 電子部品ハンドリング装置 |
| WO2006114836A1 (ja) * | 2005-04-07 | 2006-11-02 | Advantest Corporation | 電子部品のピックアンドプレース機構、電子部品ハンドリング装置および電子部品の吸着方法 |
| EP1832886B1 (de) * | 2006-03-08 | 2015-04-01 | Rasco GmbH | Vorrichtung und Verfahren zum Testen von elektronischen Bauteilen |
| JP2006279076A (ja) * | 2006-07-07 | 2006-10-12 | Matsushita Electric Ind Co Ltd | 電子部品実装方法 |
| EP1884227B1 (en) * | 2006-08-02 | 2011-06-15 | MG2 S.r.l | Method and device for conveying articles on a machine for filling capsules with at least one pharmaceutical product |
| DE102007047596B4 (de) * | 2007-10-05 | 2013-02-07 | Multitest Elektronische Systeme Gmbh | Handhabungsvorrichtung für elektronische Bauelemente, insbesondere ICs, mit einer Mehrzahl von auf einer Umlaufbahn geführten Umlaufwagen |
| US20110315512A1 (en) * | 2010-06-23 | 2011-12-29 | Serpa Fernando M | Product collating system |
| US9015929B2 (en) * | 2010-07-16 | 2015-04-28 | Tecnomatic S.P.A. | Apparatus and method for inserting preformed electrical bar conductors in a twisting device |
-
2007
- 2007-10-05 DE DE102007047678A patent/DE102007047678B4/de not_active Expired - Fee Related
-
2008
- 2008-09-25 EP EP08838310A patent/EP2195671B1/de not_active Not-in-force
- 2008-09-25 WO PCT/EP2008/008152 patent/WO2009046882A2/de active Application Filing
- 2008-09-25 DE DE502008002341T patent/DE502008002341D1/de active Active
- 2008-09-25 AT AT08838310T patent/ATE495457T1/de active
- 2008-09-25 JP JP2010522269A patent/JP5140157B2/ja not_active Expired - Fee Related
- 2008-09-25 CN CN2008800041466A patent/CN101611325B/zh not_active Expired - Fee Related
- 2008-09-25 MY MYPI20093165A patent/MY147809A/en unknown
- 2008-09-25 KR KR1020097015729A patent/KR101203770B1/ko active IP Right Grant
- 2008-09-25 US US12/526,728 patent/US8684168B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR101203770B1 (ko) | 2012-11-21 |
| KR20100033470A (ko) | 2010-03-30 |
| DE102007047678B4 (de) | 2010-02-11 |
| MY147809A (en) | 2013-01-31 |
| US8684168B2 (en) | 2014-04-01 |
| DE502008002341D1 (de) | 2011-02-24 |
| EP2195671A2 (de) | 2010-06-16 |
| DE102007047678A1 (de) | 2009-04-23 |
| JP2010537209A (ja) | 2010-12-02 |
| CN101611325A (zh) | 2009-12-23 |
| ATE495457T1 (de) | 2011-01-15 |
| US20100150686A1 (en) | 2010-06-17 |
| CN101611325B (zh) | 2012-08-29 |
| EP2195671B1 (de) | 2011-01-12 |
| WO2009046882A2 (de) | 2009-04-16 |
| WO2009046882A3 (de) | 2009-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017098980A1 (ja) | 移載装置 | |
| KR101832523B1 (ko) | 핸들러 및 부품 검사 장치 | |
| KR101527106B1 (ko) | 이재 장치 | |
| JP6049155B1 (ja) | ピックアップ装置及び電子部品搬送装置 | |
| JP5140157B2 (ja) | プランジャを移動する空動シリンダ装置を備える電子部品、特にicの取扱装置 | |
| JPH0786376A (ja) | 物品整列装置 | |
| US5919024A (en) | Parts handling apparatus | |
| TWI677685B (zh) | 電子元件測試設備 | |
| EP1286168B1 (en) | Member exchanger, method of controlling member exchanger, ic inspection method, ic handler, and ic inspector | |
| JP5083701B2 (ja) | 部品搬送装置 | |
| CN113539872B (zh) | 半导体元件平移式测试打码编带一体机 | |
| CN110114930B (zh) | 上导针装置及电池机 | |
| US6137286A (en) | Test handler | |
| JP5737767B1 (ja) | 点灯試験装置 | |
| JP5305159B2 (ja) | ターレットによる複数ヘッド式リッド溶接装置 | |
| CN113770041A (zh) | 摆臂上料式分光机 | |
| KR100433788B1 (ko) | 테스트 로봇 시스템 | |
| CN110732498B (zh) | 分类装置 | |
| TWI769664B (zh) | 測試裝置及其應用之測試設備 | |
| JPS63202032A (ja) | 電気または電子部品用吸引ピックアップ装置 | |
| JP2017105618A (ja) | 処理ユニット及び電子部品搬送装置 | |
| JP5828180B1 (ja) | 外観検査付搬送装置、外観検査付搬送方法 | |
| JP5803034B1 (ja) | 搬送装置、搬送方法 | |
| JPH1140582A (ja) | 半導体装置製造用プレス搬送装置 | |
| JP2005538538A (ja) | 電子構成部品の反転装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120306 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120606 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120704 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5140157 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151122 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |