JP5127748B2 - 質問信号送信方法 - Google Patents
質問信号送信方法 Download PDFInfo
- Publication number
- JP5127748B2 JP5127748B2 JP2009056929A JP2009056929A JP5127748B2 JP 5127748 B2 JP5127748 B2 JP 5127748B2 JP 2009056929 A JP2009056929 A JP 2009056929A JP 2009056929 A JP2009056929 A JP 2009056929A JP 5127748 B2 JP5127748 B2 JP 5127748B2
- Authority
- JP
- Japan
- Prior art keywords
- lockout
- coverage
- function
- aircraft
- question
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
この発明は上記事情によりなされたもので、その目的は、ロックアウト機能により応答信号の受信効率が低下することを防止した質問信号送信方法を提供することにある。
これに対しこの実施形態では、スイープ方向に応じてPR値を変化させ、重なりの無い距離が長いスイープではPR値を高くして応答率を高めるようにする。以下に詳しく説明する。
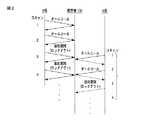
地上局において1スイープに相当するアジマスが変化すると(ステップS2)、そのアジマスに相当する重複領域の割合に応じてPR値を可変し、その値を記したロックアウトオーバライドのオールコール質問を送信する(ステップS3)。
Claims (2)
- 個別質問に対する航空機からの応答を抑制するロックアウト機能と、複数のセンサ覆域の重複する重複領域において前記ロックアウト機能を抑圧するロックアウト覆域制限機能とを備えるモードS二次監視レーダシステムにおける質問信号送信方法であって、
前記質問信号を送出するスイープごとの前記重複領域の距離範囲を、磁方位単位ごとに予め対応付けたデータベースを作成することと、
前記データベースにおける磁方位に対応付けられた距離範囲の長さに対応して、ロックアウトオーバライドの確率指示に係わるPR値を可変することと、
前記PR値を含むロックアウトオーバライドのオールコール質問を送信することとを含むことを特徴とする質問信号送信方法。 - さらに、前記オールコール質問に対する応答を返送した航空機の位置がロックアウト覆域制限領域内にあるか否かを判定することと、
前記位置がロックアウト覆域制限領域にあればロックアウト指示を出さずに次のスイープに移行することとを含むことを特徴とする請求項1に記載の質問信号送信方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009056929A JP5127748B2 (ja) | 2009-03-10 | 2009-03-10 | 質問信号送信方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009056929A JP5127748B2 (ja) | 2009-03-10 | 2009-03-10 | 質問信号送信方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010211517A JP2010211517A (ja) | 2010-09-24 |
| JP5127748B2 true JP5127748B2 (ja) | 2013-01-23 |
Family
ID=42971601
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009056929A Expired - Fee Related JP5127748B2 (ja) | 2009-03-10 | 2009-03-10 | 質問信号送信方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5127748B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5958528B2 (ja) * | 2012-02-15 | 2016-08-02 | 日本電気株式会社 | 移動体位置測定システム、中央処理部及びそれらに用いる質問制御方法 |
| JP2014199214A (ja) * | 2013-03-29 | 2014-10-23 | 株式会社東芝 | 二次監視レーダ装置、及びレーダシステム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04332892A (ja) * | 1991-05-09 | 1992-11-19 | Toshiba Corp | 二次監視レーダ装置 |
| JPH09159755A (ja) * | 1995-12-06 | 1997-06-20 | Toyo Commun Equip Co Ltd | 2次レーダシステム |
| JP3042469B2 (ja) * | 1997-10-30 | 2000-05-15 | 日本電気株式会社 | 航空機監視システム |
| JP4723961B2 (ja) * | 2004-09-14 | 2011-07-13 | 株式会社東芝 | 二次監視レーダ装置とその質問送信方法 |
| JP4664841B2 (ja) * | 2006-03-16 | 2011-04-06 | 株式会社東芝 | 二次監視レーダ |
| JP4377894B2 (ja) * | 2006-06-30 | 2009-12-02 | 株式会社東芝 | モードs二次監視レーダ |
| JP4498332B2 (ja) * | 2006-09-14 | 2010-07-07 | 株式会社東芝 | モードs二次監視レーダ装置 |
-
2009
- 2009-03-10 JP JP2009056929A patent/JP5127748B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010211517A (ja) | 2010-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| de Ponte Müller | Survey on ranging sensors and cooperative techniques for relative positioning of vehicles | |
| US9310477B1 (en) | Systems and methods for monitoring airborne objects | |
| EP2270535B1 (en) | Indoor/outdoor decision apparatus and indoor/outdoor decision method | |
| US8446310B2 (en) | Method and system for locating signal jammers | |
| ES2525034T3 (es) | Algoritmo antirreflejos de modo S para eliminar falsas derrotas debidas a respuestas reflejadas en sistemas de radar terrestre | |
| US9063208B2 (en) | Assisted global navigation satellite system for indoor positioning | |
| Papi et al. | Radiolocation and tracking of automatic identification system signals for maritime situational awareness | |
| US7809496B2 (en) | Error control in a traffic management system | |
| CN110913331A (zh) | 一种基站干扰源定位系统和方法 | |
| CN109407049B (zh) | 一种全被动探测的目标定位方法和系统 | |
| CN104134373A (zh) | 用于ads-b验证和导航的使用到达角测量的装置、系统和方法 | |
| CN104808197A (zh) | 一种多监视源飞行目标并行跟踪处理方法 | |
| CN109085573A (zh) | 车载无人机管控系统及方法 | |
| Zhao et al. | An RSSI gradient-based AP localization algorithm | |
| CN106373433A (zh) | 一种飞行器的飞行路线设置方法及装置 | |
| US11687072B2 (en) | Automatic UAV landing pad | |
| CN106597369A (zh) | 一种无人机的控制方法、控制平台、控制系统 | |
| EP3761062A1 (en) | Position determination of mobile objects | |
| BR102016002937A2 (pt) | método de detecção de intrusão, método para detectar um objeto intrusivo e sistema de navegação | |
| US8340936B2 (en) | Methods and systems for locating targets | |
| CN110045328A (zh) | 基于小型无人机平台的反黑飞无人机探测定位方法 | |
| KR20160113841A (ko) | 드론을 이용한 위치 추적 서비스를 운영하는 방법과 시스템 및 이 방법을 기록한 컴퓨터로 읽을 수 있는 기록 매체 | |
| Tang et al. | Improving performance of pedestrian positioning by using vehicular communication signals | |
| Wang et al. | UGV‐UAV robust cooperative positioning algorithm with object detection | |
| CN105243364A (zh) | 光电吊舱搜索方法、装置以及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110427 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120921 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121030 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151109 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |