JP5119082B2 - 洗濯機 - Google Patents
洗濯機 Download PDFInfo
- Publication number
- JP5119082B2 JP5119082B2 JP2008204981A JP2008204981A JP5119082B2 JP 5119082 B2 JP5119082 B2 JP 5119082B2 JP 2008204981 A JP2008204981 A JP 2008204981A JP 2008204981 A JP2008204981 A JP 2008204981A JP 5119082 B2 JP5119082 B2 JP 5119082B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation speed
- casing
- resonance
- vibration
- washing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Description
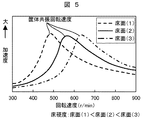
図6および図7において、床面の硬さは床面(1),床面(2),床面(3)の順に硬くなっている。図6に470r/minと700r/minに一定時間を持つ起動パターンを一例として示す。ここで、回転速度を上昇する過程である回転速度(以下、保持回転速度)で一定時間を保持するのは、回転速度が上昇する前に十分に脱水を行うために必要だからである。また、図中に示すように筐体共振回転速度はピークのことを指し、それぞれの床面に設置した場合の筐体共振回転速度は、床面(1):480r/min,床面(2):570r/min,床面(3):640r/minとなっている。
まず、ドラムの回転を停止し(Step301)、リトライ回数が0より大きいか判定する(Step302)。リトライ回数はあらかじめ初期値Nを与える。リトライ回数が0より大きい場合は、リトライ回数nを1つ減らし、低回転領域のStep102に移行し、脱水運転を継続する。リトライ回数が0以下だった場合、衣類の偏りが解消されないとして、すすぎ工程での脱水運転では次の工程に移行し、脱水工程での脱水運転では運転を中断し、操作・表示パネル2を使って使用者に知らせる。
2 操作・表示パネル
3 扉
4 底部
5 胴部
6 天板部
7 スタートスイッチ
8 回転速度記録変更スイッチ
10 給水口
11 外槽
12 ダンパ
13 洗濯兼脱水槽
14 バッフル
15 支持板
16 モータ
17 排水弁
18 排水ホース
19 給水弁
20 洗剤ケース
21 水位センサ
22 空気室
23 チューブ
24 外槽振動センサ
25 操作・表示パネルの回路基板
26 筐体振動センサ
Claims (8)
- 洗濯を行う洗濯兼脱水槽と、前記洗濯兼脱水槽を内包する外槽と、前記外槽を支持する筐体と、前記洗濯兼脱水槽を回転駆動する駆動手段と、前記駆動手段を制御する制御手段と、前記筐体の振動を検出する検出手段を備えた洗濯機において、
前記検出手段の出力に基づいて前記筐体が共振する筐体共振回転速度を測定する手段と、前記筺体共振回転速度を記録する手段を備え、前記測定された筐体共振回転速度に基づいて前記駆動手段を制御することを特徴とする洗濯機。 - 請求項1において、
以前の運転で測定した筐体共振回転速度を基に、今回の筐体共振回転速度を推定し、前記推定した回転速度に応じて前記駆動機構を制御することを特徴とする洗濯機。 - 請求項1又は2において、
前記駆動手段は前記筐体共振回転速度付近の回転速度で回転する時間を短縮するように制御することを特徴とする洗濯機。 - 請求項1において、
記録した筐体共振回転速度と測定した筐体共振回転速度を比較する手段と、この手段の出力に応じて使用者に報知する手段を設けたことを特徴とする洗濯機。 - 請求項1において、
記録した筐体共振回転速度と測定した筐体共振回転速度を比較し大きく異なる場合は、前回と運転状況や設置状況が異なることを使用者に知らせることを特徴とする洗濯機。 - 請求項1の洗濯機において,筐体が共振する回転速度もしくは前記回転速度に依存した情報を使用者に知らせる表示器を有することを特徴とする洗濯機。
- 請求項1において、
前記筐体の振動が回転速度ごとに設定したしきい値よりも大きい場合に回転を停止し再起動を行う制御手段を備え、前記筐体が共振するドラム回転速度付近の回転速度では他の回転速度領域よりもしきい値を大きくすることを特徴とする洗濯機。 - 洗濯を行う洗濯兼脱水槽と、前記洗濯兼脱水槽を内包する外槽と、前記外槽を支持し、底部と胴部を有する筐体と、前記洗濯兼脱水槽を回転駆動する駆動手段と、前記駆動手段を制御する制御手段と、前記筐体の振動を検出する検出手段を備えた洗濯機において、
前記検出手段は前記筐体の胴部と底部の締結部よりも上方にある既存の回路基板上に設置することを特徴とする洗濯機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008204981A JP5119082B2 (ja) | 2008-08-08 | 2008-08-08 | 洗濯機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008204981A JP5119082B2 (ja) | 2008-08-08 | 2008-08-08 | 洗濯機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010035953A JP2010035953A (ja) | 2010-02-18 |
| JP5119082B2 true JP5119082B2 (ja) | 2013-01-16 |
Family
ID=42009075
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008204981A Expired - Fee Related JP5119082B2 (ja) | 2008-08-08 | 2008-08-08 | 洗濯機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5119082B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5289229B2 (ja) * | 2009-07-31 | 2013-09-11 | シャープ株式会社 | 洗濯機 |
| JP6151094B2 (ja) * | 2013-06-06 | 2017-06-21 | 日立アプライアンス株式会社 | 洗濯機 |
| JP2016137091A (ja) * | 2015-01-28 | 2016-08-04 | 日立アプライアンス株式会社 | 洗濯機 |
| JP2019154481A (ja) * | 2018-03-07 | 2019-09-19 | パナソニックIpマネジメント株式会社 | 洗濯機を制御する制御方法、制御装置及びプログラム |
| JP2023053434A (ja) * | 2021-10-01 | 2023-04-13 | パナソニックIpマネジメント株式会社 | 洗濯機 |
| KR20240028854A (ko) * | 2022-08-25 | 2024-03-05 | 삼성전자주식회사 | 세탁기 및 그 제어 방법 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4867631B2 (ja) * | 2006-12-08 | 2012-02-01 | パナソニック株式会社 | 洗濯機 |
| JP5010431B2 (ja) * | 2007-10-24 | 2012-08-29 | 株式会社東芝 | 洗濯機 |
-
2008
- 2008-08-08 JP JP2008204981A patent/JP5119082B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010035953A (ja) | 2010-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5119082B2 (ja) | 洗濯機 | |
| KR20100064655A (ko) | 세탁기의 제어방법 | |
| KR20120055992A (ko) | 세탁기 및 그 거품감지방법 | |
| JP5010431B2 (ja) | 洗濯機 | |
| JP5753974B2 (ja) | ドラム式洗濯機 | |
| JP2012223439A (ja) | 洗濯機 | |
| CN108796981B (zh) | 洗衣机及其控制方法 | |
| KR101463809B1 (ko) | 세탁기의 거품감지방법 | |
| JP4748973B2 (ja) | 洗濯機 | |
| JP6151094B2 (ja) | 洗濯機 | |
| JP2010046298A (ja) | 洗濯機 | |
| KR101054431B1 (ko) | 세탁기 및 그 탈수 제어 방법 | |
| WO2008148844A2 (en) | A washer/dryer and the control method thereof | |
| JP2009273544A (ja) | 洗濯機 | |
| JP5823070B2 (ja) | 洗濯機 | |
| JP5753980B2 (ja) | ドラム式洗濯機 | |
| KR20190076230A (ko) | 세탁장치 및 세탁장치의 제어방법 | |
| KR20200093210A (ko) | 세탁기 및 그 제어방법 | |
| KR101326300B1 (ko) | 세탁기와 그 제어방법 | |
| JPH05269290A (ja) | 洗濯機の脱水制御装置 | |
| JP2020103517A (ja) | 洗濯機 | |
| KR101526985B1 (ko) | 진동감지기능을 갖는 세탁기 및 이를 이용한 세탁기 제어방법 | |
| JP5852835B2 (ja) | ドラム式洗濯機 | |
| JP2002119787A (ja) | 洗濯機の制御方法および洗濯機 | |
| JP5331644B2 (ja) | 洗濯機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110223 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120925 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121022 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5119082 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |