JP5116750B2 - 位置特定方法、測位システム及びプログラム - Google Patents
位置特定方法、測位システム及びプログラム Download PDFInfo
- Publication number
- JP5116750B2 JP5116750B2 JP2009255046A JP2009255046A JP5116750B2 JP 5116750 B2 JP5116750 B2 JP 5116750B2 JP 2009255046 A JP2009255046 A JP 2009255046A JP 2009255046 A JP2009255046 A JP 2009255046A JP 5116750 B2 JP5116750 B2 JP 5116750B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- terminal
- communication
- communication terminal
- reference terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Description
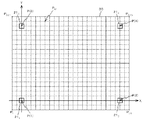
以下、本発明の第1の実施形態を、図面を参照しつつ説明する。図1は、本実施形態に係る測位システム10の概略的な構成を示す図である。測位システム10は、多数のユーザによって共有されるスペース30を利用するユーザ51の位置を測位するためのシステムである。

次に本発明の第2の実施形態について、図面を参照しつつ説明する。なお、第1の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
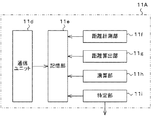
11A〜11E 通信端末
11a CPU
11b 主記憶部
11c 補助記憶部
11d 通信ユニット
11e 記憶部
11f 距離計測部
11g 距離算出部
11h 演算部
11i 特定部
211〜214 基準端末
21a CPU
21b 主記憶部
21c 補助記憶部
21d 通信ユニット
22 管理端末
22a CPU
22b 主記憶部
22c 補助記憶部
22d 通信ユニット
22e 記憶部
22f 選択部
22g 距離計測部
22h 距離算出部
22i 演算部
22j 特定部
30 スペース
51 ユーザ
Claims (12)
- 所定の範囲に存在する通信端末と、複数の基準位置との間の距離に基づいて、前記通信端末の位置を特定するための位置特定方法であって、
前記基準位置にそれぞれ配置された基準端末と、前記通信端末との通信結果に基づいて、前記通信端末と前記基準端末との間の第1距離を計測する工程と、
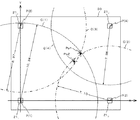
前記通信端末の、前記所定の範囲における仮定の位置を順次決定する工程と、
前記基準端末と前記仮定の位置との間の第2距離を順次算出する工程と、
前記第1距離と前記第2距離との差が、所定の閾値よりも大きい場合に、ほぼ零となる値を出力し、それ以外の場合に、前記差に応じた値を出力する評価関数を用いた演算を行う工程と、
前記演算により、前記基準端末毎に算出された前記値の合計が最も大きいときの、前記仮定の位置を前記通信端末の位置として特定する工程と、
を含む位置特定方法。 - 複数ある前記通信端末から、前記基準端末となる前記通信端末を選択する工程と、
前記基準端末が位置するところを前記基準位置に設定する工程と、
を更に含む請求項1に記載の位置特定方法。 - 位置が特定された前記通信端末を、前記基準端末に設定する工程を更に含む請求項2に記載の位置特定方法。
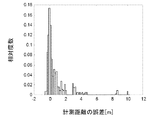
- 前記評価関数は、前記第1距離と前記第2距離との前記差を変数とする確率分布の確率密度関数である請求項1乃至3のいずれか一項に記載の位置特定方法。
- 前記確率密度関数は、前記第1距離の誤差が正規分布であるとするときの関数である請求項4に記載の位置特定方法。
- 前記確率密度関数は、算出された前記第1距離の誤差の分布に基づく関数である請求項4に記載の位置特定方法。
- 前記通信端末は、ウルトラワイドバンド方式の通信を行う請求項1乃至6のいずれか一項に記載の位置特定方法。
- 前記第1距離は、前記基準端末及び前記通信端末のうちの一方から発信された電波が、他方へ到達するまでの時間に基づいて算出される請求項1乃至7のいずれか一項に記載の位置特定方法。
- 前記第1距離は、前記基準端末及び前記通信端末のうちの一方から発信された電波の強度と、他方に到達した前記電波の強度との差に基づいて算出される請求項1乃至7のいずれか一項に記載の位置特定方法。
- 基準位置に配置された基準端末と、
所定の範囲に存在し、前記基準端末と無線通信を行う通信端末と、
前記基準端末と、前記通信端末との通信結果に基づいて、前記通信端末と前記基準端末との間の第1距離を計測する距離計測手段と、
前記通信端末の、前記所定の範囲における仮定の位置を順次決定し、前記基準端末と前記仮定の位置との間の第2距離を順次算出する距離算出手段と、
前記第1距離と前記第2距離との差が、所定の閾値よりも大きい場合に、ほぼ零となる値を出力し、それ以外の場合に、前記差に応じた値を出力する評価関数を用いた演算を行う演算手段と、
前記演算により、前記基準端末毎に算出された前記値の合計が最も大きいときの、前記仮定の位置を前記通信端末の位置として特定する位置特定手段と、
を備える測位システム。 - 所定の範囲に存在し、相互に通信を行う複数の通信端末と、
複数の前記通信端末のなかから、複数の前記通信端末の相対位置を特定するための基準となる前記通信端末を、基準端末として選択する選択手段と、
前記基準端末と、前記基準端末以外の前記通信端末との通信結果に基づいて、前記基準端末と、前記基準端末以外の前記通信端末との間の第1距離を計測する距離計測手段と、
前記基準端末以外の前記通信端末の、前記所定の範囲における仮定の位置を順次決定し、前記基準端末と前記仮定の位置との間の第2距離を順次算出する距離算出手段と、
前記第1距離と前記第2距離との差が、所定の閾値よりも大きい場合に、ほぼ零となる値を出力し、それ以外の場合に、前記差に応じた値を出力する評価関数を用いた演算を行う演算手段と、
前記演算により、前記基準端末毎に算出された前記値の合計が最も大きいときの、前記仮定の位置を前記通信端末の位置として特定する位置特定手段と、
を備える測位システム。 - コンピュータに、
基準位置にそれぞれ配置された基準端末と、通信端末との通信結果に基づいて、前記通信端末と前記基準端末との間の第1距離を算出する手順と、
前記通信端末の、前記所定の範囲における仮定の位置を順次決定する手順と、
前記基準端末の位置と、前記仮定の位置との間の第2距離を順次算出する手順と、
前記第1距離と前記第2距離との差が、所定の閾値よりも大きい場合に、ほぼ零となる値を出力し、それ以外の場合に、前記差に応じた値を出力する評価関数を用いた演算を行う手順と、
前記演算により、前記基準端末毎に算出された前記値の合計が最も大きいときの、前記仮定の位置を前記通信端末の位置として特定する手順と、
を実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009255046A JP5116750B2 (ja) | 2009-11-06 | 2009-11-06 | 位置特定方法、測位システム及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009255046A JP5116750B2 (ja) | 2009-11-06 | 2009-11-06 | 位置特定方法、測位システム及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011099778A JP2011099778A (ja) | 2011-05-19 |
| JP5116750B2 true JP5116750B2 (ja) | 2013-01-09 |
Family
ID=44191065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009255046A Active JP5116750B2 (ja) | 2009-11-06 | 2009-11-06 | 位置特定方法、測位システム及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5116750B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2505307B1 (en) | 2011-03-31 | 2014-01-08 | Makita Corporation | Power tool |
| JP2013110606A (ja) * | 2011-11-21 | 2013-06-06 | Fujitsu Ltd | 端末装置、位置特定方法、及びプログラム |
| JP6064347B2 (ja) * | 2012-03-22 | 2017-01-25 | カシオ計算機株式会社 | 情報処理装置及びプログラム |
| CN103379427B (zh) | 2012-04-13 | 2016-06-15 | 华为技术有限公司 | 一种定位方法、设备及系统 |
| JP2014215134A (ja) * | 2013-04-24 | 2014-11-17 | 株式会社東芝 | 位置推定装置、位置推定方法、及び無線通信システム |
| JP6177612B2 (ja) * | 2013-07-26 | 2017-08-09 | 株式会社田定工作所 | 航空機からの信号を用いた測位方法及び測位装置 |
| JP6311505B2 (ja) * | 2014-07-09 | 2018-04-18 | 株式会社デンソー | 測位装置 |
| JP6703094B2 (ja) * | 2016-03-16 | 2020-06-03 | アルプスアルパイン株式会社 | 位置検出システム |
| GB2551347B (en) * | 2016-06-13 | 2020-04-15 | Toshiba Kk | Indoor localisation using received signal quality weights |
| JP7036755B2 (ja) * | 2019-01-28 | 2022-03-15 | 大井電気株式会社 | 測位装置 |
| EP3928118A4 (en) * | 2019-02-24 | 2022-11-16 | Locix Inc. | SYSTEMS AND METHODS FOR ACCURATE RADIO FREQUENCY LOCATION USING ARRIVAL TIME SCAN TIME DIFFERENCE |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3461167B2 (ja) * | 2001-02-07 | 2003-10-27 | 株式会社日立製作所 | 位置計算方法及び位置算出装置 |
| JP5075396B2 (ja) * | 2006-11-09 | 2012-11-21 | アズビル株式会社 | 位置推定方法および位置推定システム |
| JP2008249396A (ja) * | 2007-03-29 | 2008-10-16 | Brother Ind Ltd | 移動局の静止判定を利用した位置検出システム |
| JP2009069026A (ja) * | 2007-09-13 | 2009-04-02 | Brother Ind Ltd | 移動局測位システム |
-
2009
- 2009-11-06 JP JP2009255046A patent/JP5116750B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011099778A (ja) | 2011-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5116750B2 (ja) | 位置特定方法、測位システム及びプログラム | |
| CN109963287B (zh) | 天线方向角优化方法、装置、设备及介质 | |
| US9883407B2 (en) | Radio wave propagation environment measuring apparatus, radio network construction system, and method for measuring radio wave propagation environment | |
| JP5818779B2 (ja) | フィンガープリント法を用いた位置検出システム及び位置検出方法 | |
| EP3404439A1 (en) | Cluster-based magnetic positioning method, device and system | |
| CN101923118B (zh) | 建筑物影响估计装置及建筑物影响估计方法 | |
| JP5075396B2 (ja) | 位置推定方法および位置推定システム | |
| TW201329486A (zh) | 定位方法 | |
| JP2018519506A (ja) | 追跡のためのデバイス及び方法 | |
| TWI544822B (zh) | 訊號強度分佈建立方法及無線定位系統 | |
| KR101709411B1 (ko) | 가중치 삼변측량법에 기반한 위치 측정 방법과 이를 이용한 실내 측위 방법 | |
| RU2573592C2 (ru) | Способ и узел для локализации узла в беспроводной сети | |
| JP5358386B2 (ja) | 室内環境制御システムおよび方法 | |
| JP2006090868A (ja) | 位置決定方法、装置およびシステム | |
| JP2011099809A (ja) | 無線測位システム、無線測位方法、及び、プログラム | |
| CN102573055B (zh) | 一种无线传感网络中的节点定位方法及系统 | |
| US20200209345A1 (en) | Method and apparatus for location estimation of terminal in wireless communication system | |
| WO2021186941A1 (ja) | 位置推定装置、位置推定方法及び位置推定プログラム | |
| US20180279078A1 (en) | Confirming work supporting device, confirming work supporting system, and computer program product | |
| CN109587631B (zh) | 室内定位方法及装置 | |
| CN103796303A (zh) | 一种终端定位方法及相关设备、系统 | |
| US20210329478A1 (en) | Radio wave strength estimation device, position estimation system, and radio wave strength estimation method | |
| KR102302807B1 (ko) | 위치 측위 방법 및 장치 | |
| Wattananavin et al. | REDUCTION OF RSSI VARIATION AND POSITION ESTIMATION ERROR CAUSED BY HUMAN MOVEMENTS IN AN RSSI-BASED INDOOR LOCALIZATION SYSTEM. | |
| JP2021047115A (ja) | 位置測定システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120918 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5116750 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |