JP5111589B2 - 送り軸反転時の補正方法 - Google Patents
送り軸反転時の補正方法 Download PDFInfo
- Publication number
- JP5111589B2 JP5111589B2 JP2010241212A JP2010241212A JP5111589B2 JP 5111589 B2 JP5111589 B2 JP 5111589B2 JP 2010241212 A JP2010241212 A JP 2010241212A JP 2010241212 A JP2010241212 A JP 2010241212A JP 5111589 B2 JP5111589 B2 JP 5111589B2
- Authority
- JP
- Japan
- Prior art keywords
- command
- time
- servo motor
- torque
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/182—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by the machine tool function, e.g. thread cutting, cam making, tool direction control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/404—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by control arrangements for compensation, e.g. for backlash, overshoot, tool offset, tool wear, temperature, machine construction errors, load, inertia
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41078—Backlash acceleration compensation when inversing, reversing direction
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41084—Compensation speed axis with changing, reversing direction, quadrant circle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41115—Compensation periodical disturbance, like chatter, non-circular workpiece
Landscapes
- Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Numerical Control (AREA)
Description
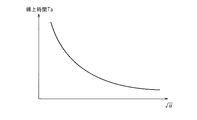
さらに、1番目の発明においては、記憶部に記憶された複数の位置指令から求められる加速度を利用しているので、新たな特別な情報を必要とすることなしに、繰上時間を簡易に求めることができる。なお、加速度の平方根と繰上時間との間の関係を予め求めておき、この関係から繰上時間を決定するのが好ましい。
さらに、1番目の発明においては、位置指令とサーボモータの実際の位置とから得られる位置偏差を用いているので、ロストモーションの影響が十分に考慮された繰上時間を求めることができる。
さらに、1番目の発明においては、トルク偏差または電流偏差を用いて繰上時間を調節している。従って、トルク偏差または電流偏差が考慮された、より正確な繰上時間を求めることができる。
14 テーブル
16 コラム
20 主軸
22 工具
24 送りねじ
26 ナット
28 Z軸ガイドレール
36 X軸ガイドレール
40 数値制御部
42 NCプログラム
44 プログラム読取解釈部
46 解釈済みプログラム記憶部
48 プログラム実行指令部
50 分配制御部
52 サーボ制御部
54 送り軸モータ駆動部
60 位置制御部
62 減算器
64 速度制御部
72 トルク検出部
74 電流検出部
90 バッファ(記憶部)
92 反転補正繰上時間計算部
94 反転補正計算部
Claims (1)
- 数値制御工作機械の送り軸の移動方向反転時に生ずる象限突起を補正する象限突起補正方法において、
前記数値制御工作機械のNCプログラムから、前記送り軸のサーボモータに指令されるべき位置指令を現在の位置指令から所定時間後の位置指令まで所定の制御周期毎に記憶部に記憶し、
記憶された前記位置指令に基づいて反転補正指令を算出し、
前記記憶部に記憶された位置指令から求めた加速度、前記位置指令と前記サーボモータの実際の位置との間の位置偏差、前記サーボモータのトルク指令と実際のトルクとの間のトルク偏差、前記サーボモータの電流指令と実際の電流との間の電流偏差のいずれかと、前記反転補正指令を前記サーボモータの速度指令またはトルク指令に付加する時刻を前記サーボモータの反転時刻から繰上げる繰上時間との関係を予め求め、
実際の前記送り軸の移動に際し、前記予め求めた関係に基づいて、前記記憶部に記憶された位置指令から求めた加速度、前記位置指令と前記サーボモータの実際の位置との間の位置偏差、前記サーボモータのトルク指令と実際のトルクとの間のトルク偏差、前記サーボモータの電流指令と実際の電流との間の電流偏差のいずれかに対応した前記繰上時間を算出し、
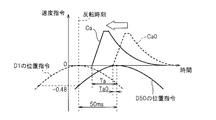
前記サーボモータの反転時刻よりも前記繰上時間だけ繰上げた時刻に前記反転補正指令を前記サーボモータの速度指令またはトルク指令に付加して象限突起を補正する、ことを特徴とする象限突起補正方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010241212A JP5111589B2 (ja) | 2010-10-27 | 2010-10-27 | 送り軸反転時の補正方法 |
| US13/823,797 US9588509B2 (en) | 2010-10-27 | 2011-10-26 | Correction method at time of feed axis reversal |
| CN201180049883.XA CN103154839B (zh) | 2010-10-27 | 2011-10-26 | 进给轴反转时的补正方法 |
| PCT/JP2011/074722 WO2012057231A1 (ja) | 2010-10-27 | 2011-10-26 | 送り軸反転時の補正方法 |
| EP11836364.7A EP2634656B1 (en) | 2010-10-27 | 2011-10-26 | Correction method during feed shaft reversal |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010241212A JP5111589B2 (ja) | 2010-10-27 | 2010-10-27 | 送り軸反転時の補正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012093989A JP2012093989A (ja) | 2012-05-17 |
| JP5111589B2 true JP5111589B2 (ja) | 2013-01-09 |
Family
ID=45993936
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010241212A Active JP5111589B2 (ja) | 2010-10-27 | 2010-10-27 | 送り軸反転時の補正方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9588509B2 (ja) |
| EP (1) | EP2634656B1 (ja) |
| JP (1) | JP5111589B2 (ja) |
| CN (1) | CN103154839B (ja) |
| WO (1) | WO2012057231A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014002228A1 (ja) * | 2012-06-28 | 2014-01-03 | 株式会社牧野フライス製作所 | 工作機械の制御装置および工作機械 |
| EP2966521A4 (en) * | 2013-03-07 | 2016-11-23 | Makino Milling Machine | PULL SPINDLE CONTROL PROCESS AND PULLING SPINDLE CONTROL DEVICE FOR WORKING MACHINE |
| KR101748337B1 (ko) * | 2013-03-29 | 2017-06-16 | 마키노 밀링 머신 주식회사 | 워크의 가공면 평가방법, 제어장치 및 공작기계 |
| JP6081954B2 (ja) * | 2014-04-24 | 2017-02-15 | ファナック株式会社 | 工作機械の反転動作を高速化する数値制御装置 |
| JP5890473B2 (ja) * | 2014-06-13 | 2016-03-22 | ファナック株式会社 | モータを制御するモータ制御装置 |
| US10295475B2 (en) | 2014-09-05 | 2019-05-21 | Rolls-Royce Corporation | Inspection of machined holes |
| JP5905556B1 (ja) | 2014-10-07 | 2016-04-20 | ファナック株式会社 | モータの反転遅れを補正するモータ制御装置 |
| US10228669B2 (en) * | 2015-05-27 | 2019-03-12 | Rolls-Royce Corporation | Machine tool monitoring |
| JP6346206B2 (ja) * | 2016-01-14 | 2018-06-20 | ファナック株式会社 | ブロック時間表示手段を有する数値制御装置 |
| WO2018066048A1 (ja) * | 2016-10-04 | 2018-04-12 | 三菱電機株式会社 | 数値制御装置 |
| JP6834528B2 (ja) * | 2017-01-25 | 2021-02-24 | オムロン株式会社 | 制御装置、制御プログラムおよび制御システム |
| JP7448658B2 (ja) | 2020-07-10 | 2024-03-12 | ファナック株式会社 | 工作機械の制御装置と制御方法及びスレーブ軸制御装置 |
| WO2025013209A1 (ja) * | 2023-07-11 | 2025-01-16 | ファナック株式会社 | 制御装置、及びコンピュータ読み取り可能な記録媒体 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6421609A (en) * | 1987-07-17 | 1989-01-25 | Mitsubishi Electric Corp | Dead zone corrector for electric working equipment |
| US4988935A (en) * | 1989-05-24 | 1991-01-29 | Universal Instruments Corporation | Advanced digital motion control |
| JP2826391B2 (ja) * | 1991-05-24 | 1998-11-18 | ファナック株式会社 | バックラッシ加速制御方法 |
| JP2875646B2 (ja) * | 1991-07-04 | 1999-03-31 | ファナック株式会社 | バックラッシ加速補正装置 |
| EP0754317B1 (de) * | 1994-04-08 | 1998-09-23 | Siemens Aktiengesellschaft | Einrichtung zur kompensation von nichtlinearitäten an maschinenachsen |
| KR100241148B1 (ko) * | 1995-07-13 | 2000-03-02 | 이종수 | 수치 제어기의 백래시 보정 장치 및 그 방법 |
| JPH09288508A (ja) * | 1996-04-19 | 1997-11-04 | Toshiba Mach Co Ltd | Nc工作機械におけるスティックモーション補正方法および装置 |
| JP3215067B2 (ja) * | 1997-03-21 | 2001-10-02 | ファナック株式会社 | 移動方向反転時の位置補正方法 |
| US6060854A (en) * | 1998-11-12 | 2000-05-09 | Vickers, Inc. | Method and apparatus for compensating for windup in a machine |
| JP3687958B2 (ja) * | 2001-03-30 | 2005-08-24 | 東芝機械株式会社 | 位置制御装置および位置制御方法 |
| JP4424350B2 (ja) * | 2004-07-29 | 2010-03-03 | 三菱電機株式会社 | 位置制御装置及びその制御方法 |
| CA2747118C (en) * | 2005-03-23 | 2015-02-10 | Hurco Companies, Inc. | Method of curvature controlled data smoothing |
| JP2008126327A (ja) * | 2006-11-17 | 2008-06-05 | Fanuc Ltd | 移動軌跡表示装置 |
| DE102008050863B4 (de) * | 2007-10-09 | 2018-05-30 | Okuma Corporation | Positionssteuerungsvorrichtung |
| CN101952084B (zh) * | 2008-02-20 | 2012-08-08 | 兄弟工业株式会社 | 进给驱动装置的间隙量检测方法和进给驱动装置的间隙量检测装置 |
| JP5308249B2 (ja) * | 2009-06-22 | 2013-10-09 | 三菱重工業株式会社 | サーボ制御装置 |
-
2010
- 2010-10-27 JP JP2010241212A patent/JP5111589B2/ja active Active
-
2011
- 2011-10-26 WO PCT/JP2011/074722 patent/WO2012057231A1/ja not_active Ceased
- 2011-10-26 EP EP11836364.7A patent/EP2634656B1/en active Active
- 2011-10-26 CN CN201180049883.XA patent/CN103154839B/zh active Active
- 2011-10-26 US US13/823,797 patent/US9588509B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9588509B2 (en) | 2017-03-07 |
| EP2634656A4 (en) | 2017-10-18 |
| US20130173046A1 (en) | 2013-07-04 |
| CN103154839A (zh) | 2013-06-12 |
| JP2012093989A (ja) | 2012-05-17 |
| EP2634656B1 (en) | 2019-02-20 |
| CN103154839B (zh) | 2015-09-09 |
| WO2012057231A1 (ja) | 2012-05-03 |
| EP2634656A1 (en) | 2013-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5111589B2 (ja) | 送り軸反転時の補正方法 | |
| JP5506945B2 (ja) | 工作機械の数値制御方法及び数値制御装置 | |
| JP4361071B2 (ja) | サーボ制御装置 | |
| JP4351281B2 (ja) | 5軸加工機を制御する数値制御装置 | |
| US10031507B2 (en) | Servo control device | |
| JP2020071734A (ja) | 数値制御装置 | |
| JPWO2012057235A1 (ja) | 数値制御方法 | |
| JP4620148B2 (ja) | サーボモータ制御装置 | |
| JP2006227886A (ja) | サーボ制御装置及びサーボ系の調整方法 | |
| US20160026169A1 (en) | Numerical controller supporting left-handed coordinate system | |
| JP7614235B2 (ja) | 数値制御装置 | |
| JP4796936B2 (ja) | 加工制御装置 | |
| US20040059460A1 (en) | Numerical controller | |
| JP3426779B2 (ja) | 数値制御工作機械のバックラッシ補正装置 | |
| JP2012056005A (ja) | パラメータ設定方法およびパラメータ設定装置 | |
| JP2018106279A (ja) | 数値制御装置 | |
| WO2016051542A1 (ja) | 送り軸制御方法および数値制御工作機械 | |
| JP6666234B2 (ja) | 数値制御装置 | |
| JP2009070089A (ja) | 数値制御装置及び数値制御方法 | |
| JP2012093982A (ja) | 象限突起補正方法 | |
| JP4036502B2 (ja) | Ncプログラム作成方法、作成装置及びnc工作機械の制御方法 | |
| JPH0474205A (ja) | 数値制御装置 | |
| JPH0771781B2 (ja) | 数値制御工作機械のバックラッシ補正方式 | |
| JPH04100123A (ja) | 数値制御装置の加減速時定数設定方式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120911 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121009 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5111589 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |