JP5072811B2 - 複数の伝達経路を有する変速機及びその制御方法 - Google Patents
複数の伝達経路を有する変速機及びその制御方法Info
- Publication number
- JP5072811B2 JP5072811B2 JP2008314226A JP2008314226A JP5072811B2 JP 5072811 B2 JP5072811 B2 JP 5072811B2 JP 2008314226 A JP2008314226 A JP 2008314226A JP 2008314226 A JP2008314226 A JP 2008314226A JP 5072811 B2 JP5072811 B2 JP 5072811B2
- Authority
- JP
- Japan
- Prior art keywords
- continuously variable
- switching
- variable transmission
- path
- transmission path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66254—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling of shifting being influenced by a signal derived from the engine and the main coupling
- F16H61/66259—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling of shifting being influenced by a signal derived from the engine and the main coupling using electrical or electronical sensing or control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/021—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing
- F16H37/022—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing the toothed gearing having orbital motion
Description
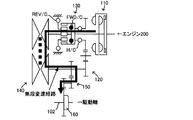
120 直結駆動用ギヤ列(直結駆動機構)
130 切換え機構
140 無段変速機構
200 エンジン(原動機)
300 変速機コントローラ(切換え制御手段、無段変速機構変速制御手段、待機中変速制御手段、急踏込み判断手段)
302 記憶装置(変速マップ記憶手段、切換えマップ記憶手段)
Claims (3)
- 原動機を備えた車両に搭載され、前記原動機から入力される回転駆動力を変速して出力軸に伝達する伝達経路として、変速比を無段階に変更する無段変速機構を経由する無段変速経路と、変速比固定の直結駆動機構を経由する直結駆動経路と、を並列に有し、切換え機構により前記伝達経路を切り換える変速機であって、
前記車両の現在の走行状態(以下、「実走行状態」という。)に基づいて前記伝達経路の切換えを判断し、該判断に基づき前記切換え機構を制御する切換え制御手段と、
前記無段変速経路が用いられている間、前記実走行状態に基づいて前記無段変速機構の目標変速比を設定し、前記無段変速機構の変速比を前記目標変速比に制御する無段変速機構変速制御手段と、
前記直結駆動経路が用いられている間、前記切換え制御手段により前記伝達経路が前記直結駆動経路から前記無段変速経路に切り換えられることが予定されている前記車両の走行状態(以下、「切換え予定走行状態」という。)に基づき前記無段変速機構の待機変速比を設定し、前記無段変速機構の変速比を前記待機変速比に制御する待機中変速制御手段と、
を備え、
前記切換え予定走行状態が、現在の車速で前記切換え制御手段により前記伝達経路が前記直結駆動経路から前記無段変速経路に切り換えることが予定されている前記車両の走行状態であり、
前記走行状態が、車速と前記原動機のスロットル開度とで定義される走行状態であり、
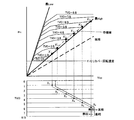
前記走行状態と前記無段変速機構の目標変速比との関係を規定する変速マップを記憶する変速マップ記憶手段と、
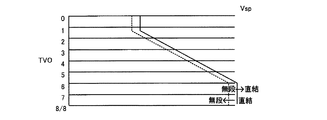
前記走行状態に基づき前記無段変速経路と前記直結駆動経路とのいずれを用いるかを規定する切換えマップを記憶する切換えマップ記憶手段と、
をさらに備え、
前記切換え制御手段が、前記実走行状態に基づき前記切換えマップを参照することで前記伝達経路との切換えを判断し、
前記無段変速機構変速制御手段が、前記無段変速経路が用いられている間、前記実走行状態に基づき前記変速マップを参照することで前記目標変速比を設定し、
前記待機中変速制御手段が、前記直結駆動経路が用いられている間、前記切換え予定走行状態を、現在の車速と、前記切換えマップにより現在の車速で前記直結駆動経路から前記無段変速経路への切換えが予定されているスロットル開度とで定義し、前記切換え予定走行状態に基づき前記変速マップを参照して前記待機変速比を設定する、
ことを特徴とする変速機。 - 請求項1に記載の変速機であって、
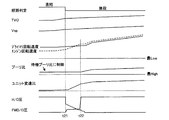
前記切換え制御手段により前記直結駆動経路から前記無段変速経路への切換えが判断されたときに、前記スロットル開度の変化に基づきアクセルペダルの急踏込みがあったかを判断する急踏込み判断手段を備え、
前記切換え制御手段が、
前記急踏込み判断手段により前記アクセルペダルの急踏込みがあったと判断された場合は、前記実走行状態に基づき前記変速マップを参照して前記目標変速比を設定して前記無段変速機構の変速比を前記目標変速比とする変速制御を開始し、かつ、前記変速機を前記原動機からの回転駆動力を前記出力軸に伝達しないニュートラル状態として前記原動機の回転速度を前記無段変速機構の入力側回転速度に同期させる同期制御を開始し、
前記無段変速機構の変速比が前記目標変速比となり、かつ、前記原動機の回転速度が前記無段変速機構の入力側回転速度に同期してから、前記伝達経路を前記無段変速経路に切り換えるよう前記切換え機構を制御する、
ことを特徴とする変速機。 - 原動機を備えた車両に搭載され、前記原動機から入力される回転駆動力を変速して出力軸に伝達する伝達経路として、変速比を無段階に変更する無段変速機構を経由する無段変速経路と、変速比固定の直結駆動機構を経由する直結駆動経路と、を並列に有し、切換え機構により前記伝達経路を切り換える変速機の制御方法であって、
前記車両の現在の走行状態(以下、「実走行状態」という。)に基づいて前記伝達経路の切換えを判断し、該判断に基づき前記切換え機構を制御する切換え制御手順と、
前記無段変速経路が用いられている間、前記実走行状態に基づいて前記無段変速機構の目標変速比を設定し、前記無段変速機構の変速比を前記目標変速比に制御する無段変速機構変速制御手順と、
前記直結駆動経路が用いられている間、前記切換え制御手順により前記伝達経路が前記直結駆動経路から前記無段変速経路に切り換えられることが予定されている前記車両の走行状態に基づき前記無段変速機構の待機変速比を設定し、前記無段変速機構の変速比を前記待機変速比に制御する待機中変速制御手順と、
を含み、
前記切換え予定走行状態が、現在の車速で前記切換え制御手順により前記伝達経路が前記直結駆動経路から前記無段変速経路に切り換えることが予定されている前記車両の走行状態であり、
前記走行状態が、車速と前記原動機のスロットル開度とで定義される走行状態であり、
前記走行状態と前記無段変速機構の目標変速比との関係を規定する変速マップを記憶する変速マップ記憶手順と、
前記走行状態に基づき前記無段変速経路と前記直結駆動経路とのいずれを用いるかを規定する切換えマップを記憶する切換えマップ記憶手順と、
をさらに含み、
前記切換え制御手順が、前記実走行状態に基づき前記切換えマップを参照することで前記伝達経路との切換えを判断し、
前記無段変速機構変速制御手順が、前記無段変速経路が用いられている間、前記実走行状態に基づき前記変速マップを参照することで前記目標変速比を設定し、
前記待機中変速制御手順が、前記直結駆動経路が用いられている間、前記切換え予定走行状態を、現在の車速と、前記切換えマップにより現在の車速で前記直結駆動経路から前記無段変速経路への切換えが予定されているスロットル開度とで定義し、前記切換え予定走行状態に基づき前記変速マップを参照して前記待機変速比を設定する、
ことを特徴とする変速機の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008314226A JP5072811B2 (ja) | 2008-12-10 | 2008-12-10 | 複数の伝達経路を有する変速機及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008314226A JP5072811B2 (ja) | 2008-12-10 | 2008-12-10 | 複数の伝達経路を有する変速機及びその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010138961A JP2010138961A (ja) | 2010-06-24 |
| JP5072811B2 true JP5072811B2 (ja) | 2012-11-14 |
Family
ID=42349263
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008314226A Expired - Fee Related JP5072811B2 (ja) | 2008-12-10 | 2008-12-10 | 複数の伝達経路を有する変速機及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5072811B2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6115631B2 (ja) * | 2013-04-04 | 2017-04-19 | トヨタ自動車株式会社 | 車両の制御装置および方法 |
| JP6015852B2 (ja) * | 2013-04-16 | 2016-10-26 | トヨタ自動車株式会社 | 車両の制御装置および方法 |
| DE112014005606A5 (de) | 2013-12-09 | 2016-11-03 | Schaeffler Technologies AG & Co. KG | CVT-Getriebe |
| WO2015086016A1 (de) * | 2013-12-09 | 2015-06-18 | Schaeffler Technologies AG & Co. KG | Cvt-antriebsstrang |
| JP6349544B2 (ja) * | 2014-01-31 | 2018-07-04 | ダイハツ工業株式会社 | 油圧制御装置 |
| JP5811203B2 (ja) | 2014-02-06 | 2015-11-11 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| CN106104095B (zh) * | 2014-03-18 | 2017-11-14 | 本田技研工业株式会社 | 无级变速器的控制装置 |
| US9829102B2 (en) | 2014-04-03 | 2017-11-28 | Toyota Jidosha Kabushiki Kaisha | Control system for vehicle |
| JP6070623B2 (ja) * | 2014-04-25 | 2017-02-01 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6052239B2 (ja) * | 2014-05-30 | 2016-12-27 | トヨタ自動車株式会社 | 車両用変速機の制御装置 |
| JP6241445B2 (ja) * | 2015-04-17 | 2017-12-06 | トヨタ自動車株式会社 | 動力伝達装置の制御装置 |
| JP6790750B2 (ja) * | 2016-11-16 | 2020-11-25 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP6888544B2 (ja) * | 2017-12-27 | 2021-06-16 | トヨタ自動車株式会社 | 経路切換制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6293561A (ja) * | 1985-10-19 | 1987-04-30 | Daihatsu Motor Co Ltd | 変速機の切換制御方法 |
| JPS6328740A (ja) * | 1986-07-23 | 1988-02-06 | Daihatsu Motor Co Ltd | 直結機構付無段変速機の制御方法 |
| JPS6338759A (ja) * | 1986-08-01 | 1988-02-19 | Daihatsu Motor Co Ltd | 直結機構付無段変速機の制御方法 |
| JPS6441428A (en) * | 1987-08-06 | 1989-02-13 | Daihatsu Motor Co Ltd | Switching control for continuously variable transmission equipped with direct connection mechanism |
| JP3915395B2 (ja) * | 2000-11-06 | 2007-05-16 | トヨタ自動車株式会社 | 無段変速機構付き変速機の制御装置 |
| JP2003336736A (ja) * | 2002-05-22 | 2003-11-28 | Fuji Heavy Ind Ltd | 車両用自動変速機 |
-
2008
- 2008-12-10 JP JP2008314226A patent/JP5072811B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010138961A (ja) | 2010-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5072811B2 (ja) | 複数の伝達経路を有する変速機及びその制御方法 | |
| KR101647513B1 (ko) | 무단 변속기 및 그 제어 방법 | |
| JP4923079B2 (ja) | 無段変速機及びその制御方法 | |
| JP5027179B2 (ja) | 無段変速機及びその制御方法 | |
| EP2169278A1 (en) | Continuously variable transmission and control method thereof | |
| EP2275710B1 (en) | Control device of and control method for vehicle continuously variable transmission | |
| EP2169277A1 (en) | Continuously variable transmission and control method thereof | |
| US9421978B2 (en) | Continuously variable transmission and control method therefor | |
| JP5669779B2 (ja) | 無段変速機の変速制御装置 | |
| WO2016017271A1 (ja) | 無段変速機及びその制御方法 | |
| JP5849102B2 (ja) | 無段変速機及びその制御方法 | |
| CN108474468B (zh) | 车辆的控制装置、及车辆的控制方法 | |
| CN108603590B (zh) | 车辆的控制装置 | |
| KR20160043007A (ko) | 부변속기를 구비한 무단 변속기의 제어 장치 | |
| WO2014061563A1 (ja) | 無段変速機及びその制御方法 | |
| CN108351023B (zh) | 车辆的控制装置及车辆的控制方法 | |
| JP2009014105A (ja) | 車両用無段変速機の制御装置 | |
| JP2017166600A (ja) | 自動変速機の制御装置 | |
| JP2015232380A (ja) | 車両用駆動装置の制御装置 | |
| JP5993391B2 (ja) | 変速機及びその制御方法 | |
| JP2015135165A (ja) | 無段変速機及びその制御方法 | |
| JP5292494B2 (ja) | 無段変速機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120216 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120814 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120821 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150831 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313114 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |