JP5045557B2 - 走行車両 - Google Patents
走行車両 Download PDFInfo
- Publication number
- JP5045557B2 JP5045557B2 JP2008141533A JP2008141533A JP5045557B2 JP 5045557 B2 JP5045557 B2 JP 5045557B2 JP 2008141533 A JP2008141533 A JP 2008141533A JP 2008141533 A JP2008141533 A JP 2008141533A JP 5045557 B2 JP5045557 B2 JP 5045557B2
- Authority
- JP
- Japan
- Prior art keywords
- turning
- traveling
- seedling planting
- control
- turn
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Guiding Agricultural Machines (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
Description
特許文献1(特開2004−196000号公報)には、左右の後輪への伝動を各別に断続するサイドクラッチと、前輪が直進姿勢から設定角度以上に操向されると旋回内側のサイドクラッチを切り操作する機械式の自動操向機構を備えており、前輪が直進姿勢から設定角度以上に操向されている状態が検出されると、旋回内側の後輪に対するサイドクラッチをアクチュエータによって自動的かつ間欠的に入り切り制御する構成が開示されている。
請求項1記載の発明は、走行車体と、該走行車体の操縦席に設けた操向方向を決める操向手段と、該操向手段の操作に連動して進行方向に向かって左右に設けられた走行推進体の向きを変更できるステアリング機構と、該ステアリング機構に連動して旋回内側の走行推進体の駆動を断続的に入/切する旋回制御を実行する旋回連動機構と、走行推進体の旋回外側の伝動軸回転数検出手段と、走行推進体の旋回内側の伝動軸回転数検出手段と、走行車体の旋回時において、旋回内側の走行推進体の駆動を旋回連動機構により断続的に入/切する周期を、旋回外側の走行推進体の伝動軸回転数検出手段により検出される回転数に応じて変更する制御装置を備えた走行車両において、上記走行車体には、その前後進の方向を検出する前後進検出手段を設け、この前後進検出手段の後進検出信号を条件として上記制御装置により、走行車体の旋回時において、旋回内側の走行推進体の駆動を断続的に入/切する旋回制御を実行しない構成としたことを特徴とする。
図1及び図2は本発明を用いた一実施例である粉粒体繰出し装置として施肥装置を装着した乗用型田植機の側面図と平面図である。この施肥装置付き乗用型田植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に施肥装置5の本体部分が設けられている。
また、ロータ上下位置調節レバー81の下端部には折曲片82が固着されており、該折曲片82は支持枠体65に回動自在に支持されている。そして前記レバー81が車両の左右方向に回動操作されると、支持枠体65の両側辺部材65bに回動自在に支持された梁部材66に固着支持された突出部66aの近くを折曲片82が上下に回動する。折曲片82は前記突出部66aの下方を係止しているので、該突出部66aがレバー81の機体右方向の回動で、上向きに梁部材66を中心として回動する。該突出部66aの前記回動により第一リンク部材76の梁部材66との連結部と反対側の端部も梁部材66を中心として上向きに回動する。この第一リンク部材76の上方への回動により第二リンク部材77とスプリング78を介してロータ27bを上方に上げることができる。ロータ27bを上方に移動させると、駆動軸70bと駆動軸70aを介してロータ27aも同時に上方に移動する。
なお、ロータ上下位置調節レバー81は車体2のほぼ中央部に設けているので、ロータ27a,27bの上下動を行う場合に左右のバランスを取りやすい。
図3の平面図には、図1の乗用型田植機の操向操作に連動する後輪11のサイドクラッチ作動機構図を示す。
ハンドル34で旋回動作させる際に、ハンドル34の操作により作動するピットマンアーム175に出力軸174を介して作動ローラ177を連動させ、該作動ローラ177に従動体179を連動させて左右の後輪11の伝動軸のサイドクラッチ操作アーム86Iを作動させるクラッチ連動用の左右ロッド180が設けられているが、該クラッチ連動用左右ロッド180とサイドクラッチ操作アーム86Iとの間は左右のプルシリンダ217で連結した構成となっている。
上記した実施例では、ステアリングハンドル34の所定角以上の操作により、旋回内側の後輪11のサイドクラッチ(図示せず)を切る例を示したが、サイドクラッチスイッチを作業モニタ装置に備えた操作盤33に設けておき、手動でサイドクラッチの「切」が可能な構成にしても良い。または、サイドクラッチペダルにより、手動でサイドクラッチの「切」が可能な構成にしても良い。
次に、後進時に苗植付部4を自動的に上昇させる制御構成について説明する。先ず、チェンジレバー90(前後進レバー)を後進速に操作すると、チェンジレバー90の基部に設けた接当片が接当してONになるバックリフトスイッチ191が設けられており、制御装置163(図4)の苗植付装置上昇手段により電磁油圧バルブ(昇降バルブ)161を作動させる電磁ソレノイドを制御して油圧シリンダー46にて苗植付部4を最大位置まで上昇させるように構成されている。
この制御の考え方を図5と図6に示す。
すなわち、ステアリングハンドル34を切り、旋回内側の後輪11のサイドクラッチが切れた状態で、左右ドライブシャフトの回転数を検出し、旋回時の内側の後輪11の伝動軸回転数が設定値N1を超えると苗植付部4を下降させる。その後、後輪11の伝動軸回転数が設定値N2と苗植付け具126の作動が「切り」状態に入って(=苗植付装置52が上げ状態に移って)からステアリングハンドル34の切り操作開始までの後輪11の伝動軸の回転数nの合計値以上になると植付「入り」にする機構である。
上記旋回連動制御のフローを図7に示す。
まず、左右の後輪11,11の伝動軸の回転数を伝動軸回転数センサ205で検出し、また設定値N1(旋回開始から機体90°旋回までの旋回内側の後輪11のドライブシャフト(伝動軸)回転信号設定値)、N2(機体90°旋回から植付クラッチ「入り」までの前記ドライブシャフト回転信号設定値)、θ1((直進操作時のハンドル切り設定角度の)下限値)、θ2((直進操作時のハンドル切り設定角度の)上限値)をセットする。
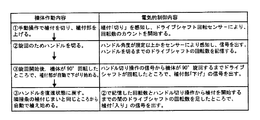
この制御フローの具体実施例を図8に示すが、ステアリングハンドル34を回して旋回する場合に、「後進」(S1)に該当せず、かつ、ドライブシャフト回転信号カウント中(S2)であることを条件に、すなわち、前後進のチェンジレバー90等の前後進検出手段の信号により前進動作中であることを条件に、旋回を始めてから旋回外側の後輪11の回転数が所定値(a0)に達すると(この間は旋回「内」側後輪11のサイドクラッチは「切」)、前記旋回「内」側の後輪11のサイドクラッチは「入」にして、それから旋回「外」側の後輪11が所定の回転数(a1)になるまで旋回「内」側の後輪11のサイドクラッチを「入」にしておく。
この様な図8のフローに示す制御を行うと湿田での作業性が従来より向上する。
前記自動植付開始モードの設定は植始め調節ダイヤル212(図11)で行い、また前記旋回開始時からの苗の植付け始めまでの走行距離は、図11に示す植始め調節ダイヤル212を回して設定する。
前記植始め調節ダイヤル212の回転角度に応じて前記走行距離を適宜選択できる構成であるが、該ダイヤル212の前記走行距離の調節範囲より外れたダイヤル旋回角度領域(しかも自動植付開始モードに入る前のダイヤル旋回角度領域)に、車両の旋回開始時に自動的に苗植付装置4を上昇させる制御モードを選択できるオ−トリフト機能及び車両の後進時に自動的に苗植付装置4を上昇させる制御モードを選択できるバックリフト機能を兼用させている。
こうしてスリップし易い条件下での車両の旋回走行を容易に行うことができるようになる。
畦クラッチの制御系は、制御カム構成図を図13に示すように、カム231の回動によって2つのポジション間を揺動する上部配置の左右のレバー232,232と下部配置の左右のレバー233,233を設け、引き動作する側に延びる2本の上部ケーブル234,234と2本の下部ケーブル235,235を8条植付部に4機を配置した2条伝動用の電動畦クラッチにそれぞれ連結する。また、上記4系統の操作ケーブル234,235は、カム231の中心からの距離を略同等にとり、かつ、左右対称に構成する。
このように、4系統の操作ケーブル234,235をカム231の上下に振り分けて構成することにより配索を容易化することができる。
レーキ制御については、レーキを跳ね上げ位置まで揺動可能に軸支持し、回動駆動用の電動機を設けるとともに、その昇降制御のためにレーキの前側に堆積した夾雑物を検出するセンサーを設けて自動上昇可能に構成する。植付け走行中に夾雑物が溜まったときにセンサー信号によりレーキを跳ね上げる方向に回動制御することにより、レーキを一旦上昇させて夾雑物を後方に流すことができる。
ローター制御については、水深センサーの信号に応じてローターの高さ位置を制御するように構成する。
具体的には、水深センサーが高く検出したときに、ローターは、逆に高くするように制御する。このようにローターの高さを水深に応じて自動調節して水を逃がすことにより、水の抵抗を減らすことができる。
施肥制御については、薬剤送出管の側面図および要部拡大図をそれぞれ図14、図15に示すように、各施肥ホース62を受けるエア抜部62aの出口側にシャッター63を設け、また、薬剤送出管の要部平面図を図16に示すように、これら左右に横並びに配置されたシャッター63…同士を車幅方向に延びるロッド63aで接続するとともに、植付部4の上下でシャッター63が開閉動作するように、ケーブル63bをリンクベースフレーム42に連結して構成する。
10 前輪(走行推進体)
11 後輪(走行推進体)
31 座席(操縦席)
34 ステアリングハンドル(操向手段)
90 チェンジレバー(前後進検出手段)
163 制御装置
175 ピットマンアーム(ステアリング機構)
180 該クラッチ連動用左右ロッド(ステアリング機構)
205a 伝動軸回転数センサ(伝動軸回転数検出手段)
205b 伝動軸回転数センサ(伝動軸回転数検出手段)
217 プルシリンダ
A 旋回連繋機構
Claims (5)
- 走行車体(2)と、該走行車体(2)の操縦席(31)に設けた操向方向を決める操向手段(34)と、該操向手段(34)の操作に連動して進行方向に向かって左右に設けられた走行推進体(10,11)の向きを変更できるステアリング機構(175,180など)と、該ステアリング機構(175,180など)に連動して旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回制御を実行する旋回連動機構(A)と、走行推進体(11)の旋回外側の伝動軸回転数検出手段(205a)と、走行推進体(11)の旋回内側の伝動軸回転数検出手段(205b)と、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を旋回制御により断続的に入/切する周期を、旋回外側の走行推進体(11)の伝動軸回転数検出手段(205a)により検出される回転数(a1)に応じて変更する制御装置(163)を備えた走行車両において、
上記走行車体(2)には、その前後進の方向を検出する前後進検出手段(90)を設け、この前後進検出手段(90)の後進検出信号を条件として上記制御装置(163)により、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回制御を実行しない構成としたことを特徴とする走行車両。 - 苗植付装置(4)を昇降可能に装着し、旋回開始時に自動的に苗植付装置(4)を上昇させるオートリフト機能を選択したとき、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回制御を実行する構成としたことを特徴とする請求項1に記載の走行車両。
- 前後進検出手段(90)の後進検出信号を条件として、旋回内側の走行推進体(11)の駆動を連続的に入とする構成としたことを特徴とする請求項1に記載の走行車両。
- 苗植付装置(4)を昇降可能に装着し、苗植付装置(4)を自動的に作動させて植付を開始する制御を実行する自動植付開始モードを選択していないとき、旋回内側の走行推進体(11)の駆動を連続的に切とする構成としたことを特徴とする請求項1に記載の走行車両。
- 苗植付装置(4)を昇降可能に装着し、カム(231)の回動により揺動する左右のレバー(232、233)を、カム(231)の上下に各々設け、上下左右のレバー(232、233)に各々操作ケーブル(234,235)を連結して4系統の操作ケーブルにより4機の畦クラッチを制御する構成としたことを特徴とする請求項1に記載の走行車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008141533A JP5045557B2 (ja) | 2008-05-29 | 2008-05-29 | 走行車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008141533A JP5045557B2 (ja) | 2008-05-29 | 2008-05-29 | 走行車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009284833A JP2009284833A (ja) | 2009-12-10 |
| JP2009284833A5 JP2009284833A5 (ja) | 2012-04-12 |
| JP5045557B2 true JP5045557B2 (ja) | 2012-10-10 |
Family
ID=41454654
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008141533A Expired - Fee Related JP5045557B2 (ja) | 2008-05-29 | 2008-05-29 | 走行車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5045557B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5418214B2 (ja) * | 2009-12-25 | 2014-02-19 | 井関農機株式会社 | 乗用田植機 |
| JP5577720B2 (ja) * | 2010-01-29 | 2014-08-27 | 井関農機株式会社 | 作業機 |
| JP6056428B2 (ja) * | 2012-11-30 | 2017-01-11 | 井関農機株式会社 | 苗移植機 |
-
2008
- 2008-05-29 JP JP2008141533A patent/JP5045557B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009284833A (ja) | 2009-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4998324B2 (ja) | 走行車両 | |
| JP5045654B2 (ja) | 乗用型田植機 | |
| JP2012244939A5 (ja) | ||
| JP5045557B2 (ja) | 走行車両 | |
| JP2010035422A5 (ja) | ||
| JP5418214B2 (ja) | 乗用田植機 | |
| JP5504687B2 (ja) | 苗移植機 | |
| JP5434409B2 (ja) | 作業車両 | |
| JP5761298B2 (ja) | 苗移植機 | |
| JP2008271880A (ja) | 対地作業機 | |
| JP5656344B2 (ja) | 走行車両 | |
| JP5304164B2 (ja) | 走行車両 | |
| JP5218268B2 (ja) | 作業機 | |
| JP2013014172A (ja) | 作業車両 | |
| JP5212236B2 (ja) | 作業車両 | |
| JP2010173486A (ja) | 走行車両 | |
| JP2007295816A (ja) | 苗植機 | |
| JP5561316B2 (ja) | 走行車両 | |
| JP5577720B2 (ja) | 作業機 | |
| JP2011087525A (ja) | 作業車両 | |
| JP2011045262A (ja) | 作業車両 | |
| JP2010052605A (ja) | 走行車両 | |
| JP2012095557A (ja) | 苗移植機 | |
| JP5402554B2 (ja) | 作業機 | |
| JP5540511B2 (ja) | 苗移植機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110519 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120613 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120619 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120702 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150727 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5045557 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |