JP4936799B2 - 電子カメラ - Google Patents
電子カメラ Download PDFInfo
- Publication number
- JP4936799B2 JP4936799B2 JP2006164118A JP2006164118A JP4936799B2 JP 4936799 B2 JP4936799 B2 JP 4936799B2 JP 2006164118 A JP2006164118 A JP 2006164118A JP 2006164118 A JP2006164118 A JP 2006164118A JP 4936799 B2 JP4936799 B2 JP 4936799B2
- Authority
- JP
- Japan
- Prior art keywords
- setting
- focus
- degree
- lens
- imaging surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 claims description 65
- 238000003384 imaging method Methods 0.000 claims description 39
- 238000001514 detection method Methods 0.000 claims description 33
- 238000011156 evaluation Methods 0.000 description 50
- 230000003287 optical effect Effects 0.000 description 10
- 230000007423 decrease Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000002131 composite material Substances 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images




Landscapes
- Studio Devices (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Description
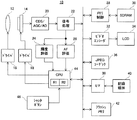
12 …フォーカスレンズ
14 …イメージセンサ
16,18 …ドライバ
26 …AF評価回路
44 …CPU
Claims (7)
- レンズを経た被写界像を捉える撮像面を有する撮像手段、
前記レンズから前記撮像面までの距離を設定幅ずつ変更する変更手段、
前記撮像面で捉えられた被写界像の合焦度を前記変更手段の変更処理と並行して検出する検出手段、
第1変更幅を前記変更手段に設定する第1設定手段、
前記第1変更幅よりも短い第2変更幅を前記変更手段に設定する第2設定手段、
前記第2設定手段の設定に対応して前記検出手段によって検出された合焦度の信頼性を示すパラメータ値を前記第1設定手段の設定に対応して前記検出手段によって検出された合焦度の大きさに対する前記第2設定手段の設定に対応して前記検出手段によって検出された合焦度の大きさの割合として算出する算出手段、
前記算出手段によって算出されたパラメータ値が既定値範囲に属するとき前記検出手段によって検出された合焦度に基づいて前記レンズから前記撮像面までの適正距離を決定する決定手段、および
前記算出手段によって算出されたパラメータ値が前記既定値範囲から下側に外れるとき前記検出手段を前記第2設定手段の設定に対応した状態でのみ再起動する第1再起動手段を備える、電子カメラ。 - 前記決定手段は、前記パラメータ値が前記既定値範囲内の下側に分布する第1値範囲に属するとき前記第1設定手段の設定に対応して前記検出手段によって検出された合焦度に基づいて前記適正距離を決定する第1距離決定手段を含む、請求項1記載の電子カメラ。
- 前記決定手段は、前記パラメータ値が前記既定値範囲内の上側に分布する第2値範囲に属するとき前記第2設定手段の設定に対応して前記検出手段によって検出された合焦度に基づいて前記適正距離を決定する第2距離決定手段を含む、請求項1または2記載の電子カメラ。
- 前記算出手段によって算出されたパラメータ値が前記既定値範囲から上側に外れるとき前記検出手段を前記第1設定手段の設定に対応した状態で再起動した後に前記第2設定手段の設定に対応した状態で再起動する第2再起動手段をさらに備える、請求項1ないし3のいずれかに記載の電子カメラ。
- 距離調整操作を受け付ける受付手段をさらに備え、
前記第1設定手段は前記第2設定手段の設定処理に先立って設定処理を実行する、請求項1ないし4のいずれかに記載の電子カメラ。 - レンズを経た被写界像を捉える撮像面を有する撮像手段、前記レンズから前記撮像面までの距離を設定幅ずつ変更する変更手段、前記撮像面で捉えられた被写界像の合焦度を前記変更手段の変更処理と並行して検出する検出手段を備える電子カメラのプロセサに、
第1変更幅を前記変更手段に設定する第1設定ステップ、
前記第1変更幅よりも短い第2変更幅を前記変更手段に設定する第2設定ステップ、
前記第2設定ステップの設定に対応して前記検出手段によって検出された合焦度の信頼性を示すパラメータ値を前記第1設定ステップの設定に対応して前記検出手段によって検出された合焦度の大きさに対する前記第2設定ステップの設定に対応して前記検出手段によって検出された合焦度の大きさの割合として算出する算出ステップ、
前記算出ステップによって算出されたパラメータ値が既定数値範囲に属するとき前記検出手段によって検出された合焦度に基づいて前記レンズから前記撮像面までの適正距離を決定する決定ステップ、および
前記算出ステップによって算出されたパラメータ値が前記既定値範囲から下側に外れるとき前記検出手段を前記第2設定ステップの設定に対応した状態でのみ再起動する再起動ステップを実行させるための、距離制御プログラム。 - レンズを経た被写界像を捉える撮像面を有する撮像手段、前記レンズから前記撮像面までの距離を設定幅ずつ変更する変更手段、前記撮像面で捉えられた被写界像の合焦度を前記変更手段の変更処理と並行して検出する検出手段を備える電子カメラによって実行される距離制御方法であって、
第1変更幅を前記変更手段に設定する第1設定ステップ、
前記第1変更幅よりも短い第2変更幅を前記変更手段に設定する第2設定ステップ、
前記第2設定ステップの設定に対応して前記検出手段によって検出された合焦度の信頼性を示すパラメータ値を前記第1設定ステップの設定に対応して前記検出手段によって検出された合焦度の大きさに対する前記第2設定ステップの設定に対応して前記検出手段によって検出された合焦度の大きさの割合として算出する算出ステップ、
前記算出ステップによって算出されたパラメータ値が既定値範囲に属するとき前記検出手段によって検出された合焦度に基づいて前記レンズから前記撮像面までの適正距離を決定する決定ステップ、および
前記算出ステップによって算出されたパラメータ値が前記既定数値範囲から下側に外れるとき前記検出手段を前記第2設定ステップの設定に対応した状態でのみ再起動する再起動ステップを備える、距離制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006164118A JP4936799B2 (ja) | 2006-06-14 | 2006-06-14 | 電子カメラ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006164118A JP4936799B2 (ja) | 2006-06-14 | 2006-06-14 | 電子カメラ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007333909A JP2007333909A (ja) | 2007-12-27 |
| JP4936799B2 true JP4936799B2 (ja) | 2012-05-23 |
Family
ID=38933462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006164118A Expired - Fee Related JP4936799B2 (ja) | 2006-06-14 | 2006-06-14 | 電子カメラ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4936799B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5063381B2 (ja) * | 2008-01-17 | 2012-10-31 | 三洋電機株式会社 | 電子カメラ |
| JP2010134210A (ja) * | 2008-12-05 | 2010-06-17 | Sanyo Electric Co Ltd | 電子カメラ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63125910A (ja) * | 1986-11-17 | 1988-05-30 | Sanyo Electric Co Ltd | オ−トフオ−カス回路 |
| JP4241591B2 (ja) * | 2001-08-10 | 2009-03-18 | キヤノン株式会社 | レンズ鏡筒 |
| JP2005266784A (ja) * | 2004-02-18 | 2005-09-29 | Canon Inc | 撮像装置、その制御方法、その制御プログラムおよび記憶媒体 |
-
2006
- 2006-06-14 JP JP2006164118A patent/JP4936799B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007333909A (ja) | 2007-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5088118B2 (ja) | 焦点調節装置 | |
| CN103733607B (zh) | 用于检测运动物体的装置和方法 | |
| US8988529B2 (en) | Target tracking apparatus, image tracking apparatus, methods of controlling operation of same, and digital camera | |
| US8717490B2 (en) | Imaging apparatus, focusing method, and computer-readable recording medium recording program | |
| JP6137840B2 (ja) | カメラシステム | |
| JP4286292B2 (ja) | 電子カメラ | |
| US20130293766A1 (en) | Imaging device and main photographic subject recognition method | |
| US10237488B2 (en) | Image capturing apparatus and image capturing method | |
| KR20090071471A (ko) | 촬상 장치 및 그 셔터 구동 모드 선택 방법 | |
| US8471953B2 (en) | Electronic camera that adjusts the distance from an optical lens to an imaging surface | |
| US20100149342A1 (en) | Imaging apparatus | |
| KR20150078275A (ko) | 움직이는 피사체 촬영 장치 및 방법 | |
| US7567753B2 (en) | Video camera and image extracting apparatus utilized for same | |
| JP5407373B2 (ja) | 撮影装置、及びプログラム | |
| JP4936799B2 (ja) | 電子カメラ | |
| JP2007052061A (ja) | 撮像装置、合焦動作制御方法および電子情報機器 | |
| JP5195663B2 (ja) | 撮像装置、合焦方法及びプログラム | |
| KR101720775B1 (ko) | 촬상 장치 및 촬상 방법 | |
| JP5477345B2 (ja) | 撮像装置、合焦方法及びプログラム | |
| JP2007049320A (ja) | 電子カメラ | |
| JP2006079069A (ja) | 電子カメラ | |
| JP5561392B2 (ja) | 撮像装置、合焦方法及びプログラム | |
| JP2010169825A (ja) | 撮像装置 | |
| JP4420651B2 (ja) | 光学装置 | |
| JP2006243609A (ja) | オートフォーカス装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090601 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120221 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |