JP4934086B2 - 医療装置 - Google Patents
医療装置 Download PDFInfo
- Publication number
- JP4934086B2 JP4934086B2 JP2008066305A JP2008066305A JP4934086B2 JP 4934086 B2 JP4934086 B2 JP 4934086B2 JP 2008066305 A JP2008066305 A JP 2008066305A JP 2008066305 A JP2008066305 A JP 2008066305A JP 4934086 B2 JP4934086 B2 JP 4934086B2
- Authority
- JP
- Japan
- Prior art keywords
- wire
- camera
- hook
- medical
- tube
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
































Landscapes
- Endoscopes (AREA)
- Surgical Instruments (AREA)
Description
(第1の実施の形態)
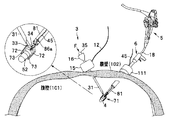
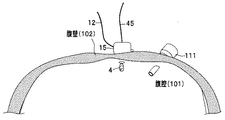
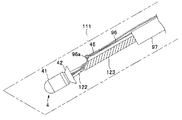
先ず、腹腔鏡下外科手術に用いられる本発明の医療装置である内視鏡システム1について、以下に説明する。尚、図1から図22は本発明の第1実施形態に係り、図1は医療装置である内視鏡システムの構成を示す図、図2は体外装置の構成を示す断面図、図3は体外装置のフック針の作用を示す上面図、図4は腹腔内設置カメラの構成を示す断面図、図5は医療機器用把持器具の構成を示す図、図6は医療機器用把持器具の先端部分を示す部分断面図、図7は医療機器用把持器具の先端部分を示す図、図8は腹腔内設置カメラを把持した医療機器用把持器具の先端部分を示す部分断面図、図9は腹腔内設置カメラを把持した医療機器用把持器具の先端部分を示す図、図10は患者の腹壁にトラカールが穿刺された状態を示す図、図11は腹腔内設置カメラを腹腔内へ導入する手順を説明するための図、図12は図11の状態のおける医療用把持器具に挿入された内視鏡の観察画像を示す図、図13は腹腔内設置カメラのワイヤを掛止する前のフック針の先端部分と腹腔内設置カメラを把持した医療機器用把持器具の先端部分を示す図、図14はフック針を腹壁に穿刺して、腹腔内設置カメラのワイヤを掛止した状態を示し、腹腔内設置カメラを腹腔内へ導入する手順を説明するための図、図15は図14の状態における医療用把持器具に挿入された内視鏡の観察画像を示す図、図16は腹腔内設置カメラのワイヤを掛止したフック針を引き上げた状態であって、腹腔内設置カメラの把持を開放した状態の医療機器用把持器具の先端部分を示す図、図17は腹腔内設置カメラのワイヤを掛止したフック針を引き上げた状態を示し、腹腔内設置カメラを腹壁へ固定する手順を説明するための図、図18はフック針を引き上げると共に、固定ユニットをフック針に沿って下ろす状態を示し、腹腔内設置カメラを腹壁へ固定する手順を説明するための図、図19は体外装置の作用を説明するための断面図、図20は固定ユニットが腹部上に設置され、腹腔内設置カメラが腹壁へ固定された状態を示す図、図21は図20の状態における固定ユニット、及び腹腔内設置カメラの断面図、図22は腹腔内設置カメラが腹壁へ固定された状態を示す内視鏡システムの全体構成図である。
硬性鏡2は、硬質な挿入部10と、この挿入部10の基端に連接された操作部11と、から主に構成されている。硬性鏡2の挿入部10は、内部にイメージガイド、及びライトガイドバンドルが挿通されており、先端面にイメージガイドを介して被写体像を後述の硬性鏡用カメラへ集光する撮影光学系、及びライトガイドバンドルからの照明光を被写体へ向けて照射する照明光学系が配設されている。
体外装置3は、図2、及び図3に示すように、カメラ4を体腔内で牽引して固定する固定ユニット15と、カメラ4を掛止して引き上げる穿刺針であるフック針16と、を有して構成されている。
固定ユニット15は、非磁性体から形成された筐体21内に受信機22、及びこの受信機22と電気的に接続された電気コネクタ部23が内蔵されている。この電気コネクタ部23は、CCU8に接続される電気ケーブル14に接続されている。固定ユニット15は、電気ケーブル14を介して、CCU8からの電源、及び受信機22からの信号をCCU8へ伝送する。
カメラ4は、図4に示すように、カメラ本体41と体内壁への接触部となる腹壁固定部42が連設して主に構成されている。
図5、及び図6に示すように、本実施の形態の医療機器用把持器具6は、上述のカメラ4を保持するための把持部71と、この把持部71が先端に配設された金属製、又は硬質な合成樹脂から形成されたアダプタ外管81と、このアダプタ外管81の内部に配設され、軟性鏡5の挿入部18が挿通配置される、金属製、又は硬質な合成樹脂から形成されたアダプタ内管77と、これら各管81,77と連通するように基端に連設された略円筒形状の操作部83と、を有して構成されている。
尚、本実施の形態のアダプタ外管81、及びアダプタ内管77は、硬質管としたが、軟性の合成樹脂から形成された軟性チューブ体でも良い。
ここで、腹腔鏡下外科手術のため、本実施の形態の内視鏡システム1が患者の体腔である腹腔101へ設置する手順、及び作用について、図8〜図22を用いて、以下に詳しく説明する。
先ず、術者は、患者100の腹壁102の1箇所に、メスなどにより小さな切開部を処置し、図8に示すように、この切開部にトラカール111を穿刺する。
次に、図23〜図26を用いて、本発明の内視鏡システム1に係る第2の実施の形態について、以下に説明する。尚、図23〜図26は、本発明の第2の実施の形態に係り、図23は医療機器用把持器具の構成を示す図、図24はワイヤ留管の回動作用を説明するための斜視図、図25はワイヤ留管の回動作用を説明するための断面図、図26は軟性鏡の撮影画像を示す図である。また、以下の説明において、上述した第1の実施の形態の内視鏡システム1と同一の構成について同じ符号を用い、それら構成の詳細な説明を省略する。
次に、図27〜図30を用いて、本発明の内視鏡システム1に係る第3の実施の形態について、以下に説明する。尚、図27〜図30は、本発明の第3の実施の形態に係り、図27はフックユニットが処置具チャンネル内に挿通された軟性鏡の挿入部が医療機器用把持器具に挿通配置された状態を示す図、図28は図27の医療機器用把持器具によりカメラを把持した状態を示す図、図29は図28の状態から、フック針がワイヤを引っ掛け易いようにフックユニットがカメラより前方へ押し出された状態を示す図、図30はカメラの撮影画像を示す図である。また、以下の説明においても、上述した第1の実施の形態の内視鏡システム1と同一の構成について同じ符号を用い、それら構成の詳細な説明を省略する。
次に、図31〜図35を用いて、本発明の内視鏡システム1に係る第4の実施の形態について、以下に説明する。尚、図31〜図35は、本発明の第4の実施の形態に係り、図31は把持鉗子を挿通配置したワイヤ操作器具の構成を示す図、図32は図31の進退操作管、及びカメラを把持した把持鉗子がトラカール内に挿通された状態を示す図、図33は腹腔内において、カメラをトラカールから導出させ、進退操作管を把持鉗子に対して前方へスライドさせた状態を示す図、図34は変形例を示し、進退操作管、及びカメラを把持した把持鉗子が軟性鏡の処置具チャンネル内に挿通された状態を示す図、図35は腹腔内において、図34の状態から、カメラを軟性鏡から導出させた進退操作管の状態を示す図である。また、以下の説明においても、上述した第1の実施の形態の内視鏡システム1と同一の構成について同じ符号を用い、それら構成の詳細な説明を省略する。
2…硬性鏡
3…体外装置
4…カメラ
5…軟性鏡
6…医療機器用把持器具
15…固定ユニット
16…フック針
18…挿入部
19…操作部
45…ワイヤ
71…把持部
72…開閉ジョー
73a…トーションスプリング
73…保持パット
74…リンク機構
77…アダプタ内管
81…アダプタ外管
83…操作部
84…グリップ
85…トリガ
86a…ワイヤフック部
86…ワイヤ留管
100…患者
101…腹腔
102…腹壁
110、111…トラカール
Claims (3)
- 腹腔鏡下外科手術に用いられる医療装置であって、
所定の画角が設定された撮像装置と、
上記撮像装置から所定の距離に離間した位置において、腹腔内に導入され、上記撮像装置の上記所定の画角よりも大きな所定の画角で撮影可能な小型撮像装置としての医療機器と、
上記医療機器から延設されたワイヤと、
上記撮像装置が挿通配置され、上記医療機器を把持する把持部および上記ワイヤを掛止するフック部を有する医療機器用把持器具と、
を備えたことを特徴とする医療装置。 - 更に、上記医療機器用把持器具は、上記フック部が長手軸回りに回動自在に配設され、該フック部を回動操作自在な操作部を有したことを特徴とする請求項1に記載の医療装置。
- 上記医療機器用把持器具は、挿通配置された上記撮像装置が上記医療機器の上記ワイヤを撮影できるように、上記撮像装置の撮影領域内で上記把持部により上記医療機器を把持可能なことを特徴とする請求項1、又は請求項2に記載の医療装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008066305A JP4934086B2 (ja) | 2008-03-14 | 2008-03-14 | 医療装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008066305A JP4934086B2 (ja) | 2008-03-14 | 2008-03-14 | 医療装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009219612A JP2009219612A (ja) | 2009-10-01 |
| JP4934086B2 true JP4934086B2 (ja) | 2012-05-16 |
Family
ID=41237066
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008066305A Expired - Fee Related JP4934086B2 (ja) | 2008-03-14 | 2008-03-14 | 医療装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4934086B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010060877B4 (de) | 2010-11-29 | 2013-08-29 | Reiner Kunz | Trokaranordnung |
| JP2017035436A (ja) * | 2015-08-11 | 2017-02-16 | 三鷹光器株式会社 | 手術用立体観察装置 |
| CN109567732B (zh) * | 2019-02-01 | 2024-07-02 | 福建骏格科技有限公司 | 胸腹腔镜的多角度影像系统 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000032442A (ja) * | 1998-07-13 | 2000-01-28 | Olympus Optical Co Ltd | 内視鏡システム |
| JP4898709B2 (ja) * | 2006-01-06 | 2012-03-21 | オリンパスメディカルシステムズ株式会社 | 経自然開口的または経皮的な医療システム |
-
2008
- 2008-03-14 JP JP2008066305A patent/JP4934086B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009219612A (ja) | 2009-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4971209B2 (ja) | 医療装置 | |
| JP5161714B2 (ja) | 医療機器 | |
| JP4898709B2 (ja) | 経自然開口的または経皮的な医療システム | |
| JP4599474B1 (ja) | 医療装置 | |
| JP4472728B2 (ja) | 内視鏡システム | |
| JP5204564B2 (ja) | 医療装置 | |
| CN101322638B (zh) | 内窥镜系统 | |
| EP2130483B1 (en) | Medical apparatus | |
| EP2189100B1 (en) | Medical apparatus | |
| JP4675241B2 (ja) | 内視鏡システム | |
| US20070161855A1 (en) | Medical procedure through natural body orifice | |
| JP2010035825A (ja) | 医療装置 | |
| EP2371264B1 (en) | Medical apparatus | |
| JP4934086B2 (ja) | 医療装置 | |
| JP2615301B2 (ja) | 電子腹腔鏡 | |
| JP2010119580A (ja) | 内視鏡システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100305 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4934086 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |