JP4889812B2 - 車外への音発生装置 - Google Patents
車外への音発生装置 Download PDFInfo
- Publication number
- JP4889812B2 JP4889812B2 JP2011029597A JP2011029597A JP4889812B2 JP 4889812 B2 JP4889812 B2 JP 4889812B2 JP 2011029597 A JP2011029597 A JP 2011029597A JP 2011029597 A JP2011029597 A JP 2011029597A JP 4889812 B2 JP4889812 B2 JP 4889812B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- warning sound
- determination
- dangerous area
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






























Landscapes
- Traffic Control Systems (AREA)
Description
また、近年、車外の道路状況や時間帯、歩行者の有無等の様々な条件で警告音を自動的に発生させるシステムが提案されているが、使用者が、警告音の発生を停止させた場合、停止してから自動的に警告音が出力されるまでに不可避的にタイムラグが発生する。
しかしながら、この装置では、使用者が、警報の発生及び停止を制御可能な場合を前提としておらず、また車両の発進時における動作に制限されている。
このため、車外に警告音を発生する必要があるエリアに自車が存在する場合において、使用者が警告音を停止する危険を回避するものではない。
実施の形態1.
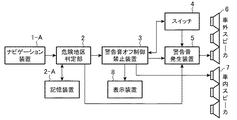
図1は、この発明の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図1において、このシステムは、危険地区情報取得装置(情報取得部)1、危険地区判定部(判定部)2、記憶装置(記憶部)2−A、警告音オフ制御禁止装置(制御部)3、スイッチ4、警告音発生装置(制御部)5、車外スピーカ6、車内スピーカ(提示部)7、及び表示装置(提示部)8を備える。なお、以降の説明では、自車の走行を周囲の歩行者等に警告する(認知させる)車外への音を、警告音と記載する。警告音と呼んでも、必ずしもサイレンなどのように緊急事態を連想させるような音である必要はなく、車両が存在することを歩行者等に認識できるような音であれば、どのような音でもよい。警告音は、従来の内燃機関を動力源とするガソリン車やディーゼル車やバイクなどの車両の走行状態を想起させる連続音のような音が望ましいが、笛、ベル、太鼓などから出るような音でもよい。
危険地区情報取得装置1は、自車両が走行中の区間情報を取得する装置であり、ナビゲーション装置、センサ部、カメラ部及び車載装置のうちの少なくとも1つで構成される。これらの態様は、本実施の形態、実施の形態2〜5で後述する。
警告音オフ制御禁止装置3は、危険地区判定部2によって自車の走行区間が危険地区であると判定されると、警告音オフ制御禁止信号をスイッチ4及び警告音発生装置5へ出力する装置である。
スイッチ4は、使用者が警告音をオンオフ制御するためのスイッチ(一時発音停止スイッチ)である。つまり、当該スイッチ4の操作が、外部から警告音(車外への音)の出力停止を指示する所定操作に相当する。なお、スイッチ4は、警告音オフ制御禁止信号を受けると、使用者が任意に警告音を停止できないように出力信号を制御する。
ナビゲーション装置1−Aは、地図情報データベースやGPS受信機、走行道路の情報を受信する通信部を備え、現在時刻情報や現在位置情報、走行道路情報(道幅、一般・高速道路等の道路の種類、制限速度、交差点、カーブ等)、事故多発地区情報、周辺施設情報などを取得して、危険地区判定部2に通知する。
なお、危険地区判定部2が、ナビゲーション装置1−Aによって取得される上記情報の内容を常に監視し、内容に変化があると、当該情報をナビゲーション装置1−Aから取得するようにしてもよい。
危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報に基づいて、図4に示す判定テーブルの条件内容が追加条件とともに自車の走行区間に対して成り立つか否かで危険地区を判定する。
なお、判定2の「周辺に小学校があるか?」の条件に合致しても、自車の走行時間が、追加条件の「登下校時間中」に合致しない場合は危険地区と判定しない。
図5に示した判定テーブルでは、例えば「周辺に小学校があるか?」という条件内容に危険度“5”を付与していたが、登下校時間外の人通りが少なくなっている時間帯では、当該危険度は過剰である。
そこで、図6に示すように、「周辺に小学校があるか?」という条件内容においても、追加条件として、時間帯が「登下校時間外」であれば、危険度を“3”とし、「登下校時間中」であれば、人通りの増加が予想されるので、危険度を最高の“10”とする。
先ず、走行道路情報から特定された自車の走行道路の道幅が狭い場合(所定の道幅以下)や、自車が交差点又はカーブを走行する場合、右左折を行う場合には、自車の走行区間を危険地区と判定してもよい。
また、高速道路では危険地区を走行中でないと判定し、サービスエリアでは危険地区を走行中であると判定してもよい。
さらに、自車の走行道路の制限速度が低い場合は、住宅街等の歩行者が多い地区である可能性が高いので、制限速度が任意の閾値以下であれば、自車が危険地区を走行中であると判定してもよい。
例えば、周囲の騒音が大きくなる時間帯は、車両の走行音が聞こえにくくなるため、危険地区を走行中と判定する。また、周囲が暗くなる時間帯では、運転手の視野角が狭まるため、危険地区を走行中と判定してもよい。この場合、ライトの点灯があれば、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
例えば、商店街が周辺に存在しても、店舗が閉店すると人通りが少なくなるため、現在時刻情報と組み合わせて、開店時間中は危険地区と判定し、閉店時間以降は危険地区ではないと判定してもよい。
これについては、危険地区から安全地区へと判定を更新する場合には、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
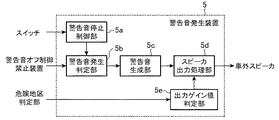
警告音オフ制御禁止信号生成部3aは、危険地区判定部2よって走行区間が危険地区と判定されると、警告音のオフ制御を禁止する信号を生成して、スイッチ4又は警告音発生装置5に通知する構成部である。
警告音オフ制御禁止告知信号とは、例えば、警告音オフ制御禁止の開始又は停止、危険地区の開始又は停止、スイッチ4の利用不可の開始又は停止といった警告音オフ制御の状態をユーザに告知するための信号である。
警告音オフ制御禁止装置3よってスイッチ4が警告音オフ制御禁止信号を受け取った場合には、ユーザが、スイッチ4を用いて警告音のオフ操作を行っても、警告音をオフ制御することができないようにする。例えば、オン状態でロックをかけることで、オフ操作が不可能な機構にする。
また、スイッチ4にLED(Light Emitting Diode)等の表示機器を取り付けて、警告音オフ制御禁止かオフ制御可能かの状態を直接表示させることで、ユーザが、わざわざ車内スピーカ7や表示装置8の確認をすることなく、スイッチ4の操作と同時に警告音オフ制御状態を確認できるようにする。
警告音停止制御部5aは、スイッチ4が押下された場合に、スイッチ4がオン操作されたのか、オフ操作されたのかを判定し、警告音オン信号もしくは警告音オフ信号を警告音発生判定部5bに通知する構成部である。
なお、警告音発生判定部5bは、警告音オフ制御禁止装置3から、警告音オフ制御禁止信号が通知された場合は、スイッチ4の操作に応じた警告音オフ信号の有無に拘わらず、警告音の発生を停止しないと判定する。つまり、警告音オフ制御禁止装置3から通知される警告音オフ制御禁止信号の方が、スイッチ4の操作信号(警告音オフ制御信号)よりも警告音発生の判定の優先度が高い。
表示装置8は、車内に備え付けられたディスプレイ等の表示機器であり、カーナビゲーションやLED、インストルパネルの表示機器を含む。
車内スピーカ7又は表示装置8は、警告音オフ制御禁止装置3から警告音オフ制御禁止告知信号を受け取り、スイッチ4で警告音のオフ操作が実行されない旨又は警告音を停止できない旨をユーザに伝える。また、危険地区を走行中にユーザが誤ってスイッチ4を警告音オフに押下した場合は、スイッチ4でオフ操作が実行されない旨又は警告音を停止できない旨をユーザに伝える。なお、ユーザへの上記通知は、車内スピーカ7又は表示装置8のうちの少なくとも一方で行われる。
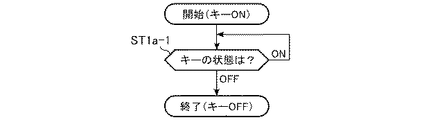
図11は、実施の形態1の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、ナビゲーション装置1−Aが、主電源であるバッテリから電力供給されて起動する。続いて、ナビゲーション装置1−Aは、GPS受信機によって現在時刻情報を取得し(ステップST1−1a)、現在位置情報を取得する(ステップST1−1b)。また、自車の走行に伴い、ナビゲーション装置1−Aは、現在位置情報に基づいて、地図情報データベースから、走行道路情報、事故多発地区情報、周辺施設情報を取得する(ステップST1−1c、ステップST1−1d、ステップST1−1e)。これらの情報は、ナビゲーション装置1−Aから危険地区判定部2へ出力される。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST1−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、告知信号生成部3bは、例えば、スイッチ4が警告音オフ制御禁止信号を受けているか否かに基づいて、警告音のオフ制御の状態の変化を認識する。
なお、警告音のオフ制御の禁止の開始及び停止時のみ、ユーザへ通知するのではなく、警告音のオフ制御の禁止中は、常に警告音のオフ制御が禁止されている等の旨を車内スピーカ7又は表示装置8から、ユーザに通知し続けてもよい。
先ず、告知信号生成部3bは、スイッチ4の押下による操作信号(警告音オフ制御信号)を入力した時点で、当該スイッチ4に警告音オフ制御禁止信号が出力されていれば(ステップST1b−1;禁止中)、警告音のオフ制御が禁止中であることを示す警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
これにより、車内スピーカ7及び表示装置8は、音声信号処理部3d及び表示信号処理部3cの制御によって警告音のオフ制御が禁止中である旨をユーザに通知し(ステップST1b−2)、割り込みが終了する。
なお、危険地区判定部2が、スイッチ4で警告音のオフ制御をしてはいけない理由として、危険地区と判定した結果の条件(自車の状況に合致した判定項目)を、警告音オフ制御禁止装置3を介して車内スピーカ7又は表示装置8を介してユーザに提示するようにしてもよい。
先ず、警告音停止制御部5aが、スイッチ4の操作内容から、オフ制御されたか、オン制御されたかを判定する(ステップST1c−1)。この判定結果は、警告音停止制御部5aから警告音発生判定部5bへ出力される。
なお、危険地区判定部2が、スイッチ4で警告音のオフ制御の操作をしてはいけない理由として、危険地区と判定した結果の条件(自車の状況に合致した判定項目)を、警告音オフ制御禁止装置3を介して車内スピーカ7又は表示装置8を介してユーザに提示するようにしてもよい。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、ナビゲーション装置1−Aとしては、車載機器として既存のものを利用することが可能である。
図15は、この発明の実施の形態2による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図15において、実施の形態2における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、センサ部1−Bを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
センサ部1−Bは、車両の周辺の歩行者や軽車両・バイク、他車両等の障害物を検知して、当該障害物の種類を示す情報及び当該障害物と車両との距離情報を取得する情報処理部も備える。このようにしてセンサ部1−Bで取得された情報は危険地区判定部2に通知される。
危険地区判定部2は、センサ部1−Bから取得した上記情報に基づいて、図16に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図16は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「周辺に歩行者がいるか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
図17に示した判定テーブルでは、例えば「周辺に歩行者がいるか?」という条件内容に危険度“8”を付与していたが、歩行者と車両とが所定の距離範囲以上離れている場合には、当該危険度は過剰である。
そこで、図18に示すように「周辺に歩行者がいるか?」という条件内容においても、追加条件として、歩行者と自車との距離が、歩行者を検知したセンサ部1−Bのセンサを中心とした「半径3m〜5m」であれば、危険度を“5”とし、歩行者と自車の距離が「半径3m以内」では、歩行者との接触の危険が予想されるので、危険度を“9”とする。
先ず、センサ部1−Bで検知された障害物と自車の距離が近い場合(障害物を検知したセンサ部1−Bのセンサを中心とした半径が所定距離の範囲内)や、障害物が複数存在する場合、障害物と自車との距離が時間経過に伴って近付いている場合には、自車の走行区間を危険地区と判定してもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
以降の説明において、実施の形態2における車外への音発生装置の構成については、図15に加え、図8〜10を参照する。
図19は、実施の形態2の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、センサ部1−Bを構成する、車体の前方、側面、及び後方のいずれかあるいは全部に1つもしくは複数取り付けたセンサが、車両の周辺の歩行者や、軽車両・バイク、他車両等の障害物を検知し、当該障害物の種類を示す情報と、当該障害物と車両との間における距離情報を取得する(ステップST2−1)。センサ部1−Bで取得された上記情報は、危険地区判定部2に通知される。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST2−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、センサ部1−Bとしては、車両に予め搭載されたコーナーセンサ等のセンサを利用することが可能である。
図20は、この発明の実施の形態3による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図20において、実施の形態3における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、カメラ部1−Cを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
また、カメラ部1−Cは、車外を撮影した映像データを画像解析して、車両周辺の歩行者や軽車両・バイク、他車両等の障害物の有無、障害物と車両との距離情報、標識情報、走行道路情報、天候や時間帯の情報を取得する情報処理部を備える。
なお、走行道路情報とは、道幅、一般道路又は高速道路等の道路の種類、制限速度、交差点、カーブ等を示す情報であり、撮影された道路形態や標識等から判断される。
また、天候や時間帯は、撮影された車外映像内の空の状況や日照量の変化を画像解析で特定することで判断する。
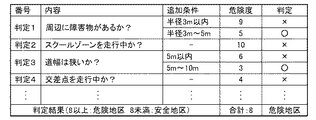
危険地区判定部2は、カメラ部1−Cから取得した上記情報に基づいて、図21に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図21は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「周辺に障害物があるか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
図22に示した判定テーブルでは、一定の道幅(例えば10m)を基準として「道幅は狭いか?」という条件内容に危険度“5”を付与していたが、上記一定幅以内の道路であっても、道路脇の歩行者との距離を十分にあけられる道幅である場合には、当該危険度は過剰である。
そこで、図23に示すように「道幅は狭いか?」という条件内容においても、追加条件として、道路脇の歩行者との距離を十分にあけられる「5m〜10m」であれば、危険度を“3”とし、道路脇の歩行者との距離が近い状態での走行が予想される「5m以内」では、危険度を“6”とする。
先ず、カメラ部1−Cで検知された障害物と自車の距離が近い場合(障害物を検知したカメラ部1−Cのカメラを中心とした半径が所定距離の範囲内)や、障害物が複数存在する場合、障害物と自車との距離が時間経過に伴って近付いている場合には、自車の走行区間を危険地区と判定してもよい。
高速道路では危険地区を走行中でないと判定し、サービスエリアでは危険地区を走行中であると判定してもよい。
自車の走行道路の制限速度が低い場合は、住宅街等の歩行者が多い地区である可能性が高いので、制限速度が任意の閾値以下であれば、自車が危険地区を走行中であると判定してもよい。
また、周囲が暗くなる時間帯は、運転手の視野角が狭まるため、危険地区を走行中と判定してもよい。この場合、ライトの点灯があれば、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
以降の説明において、実施の形態3における車外への音発生装置の構成については、図20に加え、図8〜10を参照する。
図24は、実施の形態3の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、カメラ部1−Cが、車両周辺の障害物情報を取得し(ステップST3−1a)、標識情報を取得する(ステップST3−1b)。
さらに、カメラ部1−Cは、走行道路情報、天候又は時間帯の少なくとも一方の情報を取得する(ステップST3−1c、ステップST3−1d)。これらの情報は、カメラ部1−Cから危険地区判定部2へ出力される。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST3−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
ここで、危険地区であると判定すると(ステップST3−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST3−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、カメラ部1−Cとしては、車両に予め搭載されたドライブレコーダやリアカメラ等のカメラを利用することが可能である。
図25は、この発明の実施の形態4による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図25において、実施の形態4における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、車載装置1−Dを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
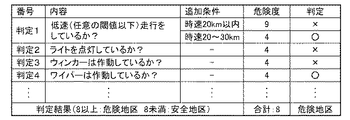
危険地区判定部2は、車載装置1−Dから取得した車速情報、ライト点灯の有無、ウィンカーの作動の有無、ワイパーの作動の有無、バック走行するか否かを示す情報等に基づいて、図26に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図26は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「低速(任意の閾値以下)走行をしているか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
図27に示した判定テーブルでは、任意の閾値(例えば、時速30km)を基準として「低速走行をしているか?」という条件内容に危険度“8”を付与していたが、上記閾値以下の車速であっても、歩行者に自車の存在を認知させる場面が少ないことが予想されるある程度速い車速範囲である場合には、当該危険度は過剰である。
そこで、図28に示すように「低速走行をしているか?」という条件内容においても、追加条件として、歩行者に自車の存在を認知させる場面が少ないことが予想される「時速20〜30km」であれば、危険度を“4”とし、歩行者に自車の存在を認知させる場面が多いことが予想される「時速20km以内」では、危険度を“9”とする。
電気自動車は、低速走行時の騒音が非常に小さく周囲に認知されにくい。
そこで、車速信号から得られる走行速度情報を用いて、走行速度が任意の閾値よりも小さい場合、危険地区を走行中であると判定する。
逆に、高速走行時は速度が出ている分、危険度が増すので、走行速度が任意の閾値以上である場合に危険地区を走行中であると判定してもよい。
そこで、バック信号から得られる車両の後方進行時は、危険地区を走行中であると判定してもよい。
ライトが点灯されている場合、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
逆に、ライトが点灯されているときは、車両周辺が暗く、運転手は障害物の認知が難しくなるため、危険地区を走行中と判定してもよい。
左折又は右折時は、死角が多く、警告音がない状態の走行は大変危険である。
そこで、ウィンカーの操作信号によって車両の左折又は右折が認知された場合は、危険地区を走行中であると判定してもよい。
また、ウィンカーの操作信号からは車線変更の情報も得られる。
車線変更時は、周囲の他の車両に自車両の存在に気付いてもらう必要があるので、危険地区を走行中であると判定してもよい。
雨が降っている場合、雨によって走行音がさらに聞こえにくくなる可能性がある。
そこで、ワイパーの作動時には、危険地区を走行中であると判定してもよい。
また、ワイパーの速度にあわせて危険地区を走行中か否かを判定してもよい。
この場合、高速道路では、歩行者はいないため危険地区を走行中でないと判定する。
しかし、サービスエリア内は歩行者が存在するので危険地区を走行中であると判定してもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
以降の説明において、実施の形態4における車外への音発生装置の構成については、図25に加え、図8〜10を参照する。
図29は、実施の形態4の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、車載装置1−Dが、車速信号を取得し(ステップST4−1a)、バック信号を取得する(ステップST4−1b)。
さらに、車載装置1−Dは、ライト情報、ウィンカー情報、ワイパー情報、及び路車間通信情報を取得する(ステップST4−1c、ステップST4−1d、ステップST4−1e、ステップST4−1f)。これらの情報は、車載装置1−Dから危険地区判定部2へ出力される。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST4−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
ここで、危険地区であると判定すると(ステップST4−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST4−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、車載装置1−Dとしては、車両に予め搭載された車速信号を検知する車速センサ、後退ギアが入ったことを示すバック信号や、ライト、ウィンカー及びワイパーが操作されたことを示す操作信号を取得する機器、及び路車間通信装置を利用することが可能である。
図30は、この発明の実施の形態5による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図30において、実施の形態5における車外への音発生装置は、危険地区判定情報取得装置として、上記実施の形態1で説明したナビゲーション装置1−A、上記実施の形態2で説明したセンサ部1−B、上記実施の形態3で説明したカメラ部1−C、及び上記実施の形態4で説明した車載装置1−Dを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した情報に基づいて、図31に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。
例えば、図31は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が、センサ部1−Bで取得された情報によって判定11の「周辺に歩行者がいるか?」の条件に合致し、カメラ部1−Cで取得された情報によって判定21の「周辺に障害物があるか?」の条件に合致した場合を示している。つまり、センサ部1−Bで検出された歩行者が、カメラ部1−Cで障害物として検出されている。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した上記情報に基づいて、図32に示す判定テーブルの条件内容が追加条件とともに自車の走行区間に対して成り立つか否かで危険地区を判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
図33に示した判定テーブルでは、任意の閾値(例えば、時速30km)を基準として「低速走行をしているか?」という条件内容に危険度“8”を付与していたが、上記閾値以下の車速であっても、歩行者に自車の存在を認知させる場面が少ないことが予想されるある程度速い車速範囲である場合には、当該危険度は過剰である。
そこで、図34に示すように「低速走行をしているか?」という条件内容においても、追加条件として、歩行者に自車の存在を認知させる場面が少ないことが予想される「時速20〜30km」であれば、危険度を“4”とし、歩行者に自車の存在を認知させる場面が多いことが予想される「時速20km以内」では、危険度を“9”とする。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
以降の説明において、実施の形態5における車外への音発生装置の構成については、図30に加え、図8〜10を参照する。
図35は、実施の形態5の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、ナビゲーション装置1−Aは、GPS受信機によって現在時刻情報を取得し、現在位置情報を取得し、走行道路情報、事故多発地区情報、周辺施設情報を取得する(ステップST5−1a)。
また、センサ部1−Bが、車両の周辺の歩行者や、軽車両・バイク、他車両等の障害物を検知し、当該障害物の種類を示す情報と、当該障害物と車両との間における距離情報を取得する(ステップST5−1b)。
カメラ部1−Cが、車両周辺の障害物情報を取得し、標識情報を取得し、走行道路情報、天候又は時間帯の少なくとも一方の情報を取得する(ステップST5−1c)。
車載装置1−Dが、車速信号を取得し、バック信号を取得し、ライト情報、ウィンカー情報、ワイパー情報、及び路車間通信情報を取得する(ステップST5−1d)。
これらの情報は、実施の形態5の危険地区判定情報取得装置からの危険地区判定情報として、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C及び車載装置1−Dから危険地区判定部2へ出力される。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST5−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
ここで、危険地区であると判定すると(ステップST5−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST5−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
Claims (1)
- 車両に搭載され、車外に音を出力する車外への音発生装置であって、
車外への音を発生させる音発生部と、
走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶部と、
前記車両の状況を示す情報を取得する情報取得部と、
前記情報取得部によって取得された前記車両の状況を示す情報と、前記記憶部から読み出した前記判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定する判定部と、
使用者が音をオンオフ制御するためのスイッチ部と、
前記音発生部の出力を制御するとともに、前記判定部によって前記車両が危険地区を走行していると判定されている場合は、前記スイッチ部からの制御信号にかかわらず、前記音発生部の出力を停止しない制御部とを備えた車外への音発生装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011029597A JP4889812B2 (ja) | 2011-02-15 | 2011-02-15 | 車外への音発生装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011029597A JP4889812B2 (ja) | 2011-02-15 | 2011-02-15 | 車外への音発生装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010547907A Division JP4688981B1 (ja) | 2010-05-26 | 2010-05-26 | 車外への音発生装置 |
Related Child Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011228985A Division JP4889826B1 (ja) | 2011-10-18 | 2011-10-18 | 車外への音発生装置 |
| JP2011228965A Division JP4889823B1 (ja) | 2011-10-18 | 2011-10-18 | 車外への音発生装置 |
| JP2011228958A Division JP4889822B1 (ja) | 2011-10-18 | 2011-10-18 | 車外への音発生装置 |
| JP2011228969A Division JP4889824B1 (ja) | 2011-10-18 | 2011-10-18 | 車外への音発生装置 |
| JP2011228977A Division JP4889825B1 (ja) | 2011-10-18 | 2011-10-18 | 車外への音発生装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011246103A JP2011246103A (ja) | 2011-12-08 |
| JP2011246103A5 JP2011246103A5 (ja) | 2012-01-26 |
| JP4889812B2 true JP4889812B2 (ja) | 2012-03-07 |
Family
ID=45411889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011029597A Expired - Fee Related JP4889812B2 (ja) | 2011-02-15 | 2011-02-15 | 車外への音発生装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4889812B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6291838B2 (ja) * | 2013-12-26 | 2018-03-14 | 富士通株式会社 | 運転支援プログラム、方法及び装置 |
| KR101875922B1 (ko) * | 2015-12-28 | 2018-08-02 | 자동차부품연구원 | Aeb 시스템을 제어하기 위한 장치 및 그 방법 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004136831A (ja) * | 2002-10-21 | 2004-05-13 | Takumakkusu:Kk | 音響発生装置および自動車 |
| JP3149916U (ja) * | 2008-10-16 | 2009-04-23 | 安弘 熊谷 | 低駆動音車両用の接近報知装置、およびこれを搭載した車両 |
-
2011
- 2011-02-15 JP JP2011029597A patent/JP4889812B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011246103A (ja) | 2011-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4688981B1 (ja) | 車外への音発生装置 | |
| JP6935800B2 (ja) | 車両制御装置、車両制御方法、および移動体 | |
| US20120166042A1 (en) | Sound output device for electric vehicle | |
| CN112298024B (zh) | 一种避让提醒系统、方法、车辆及计算机存储介质 | |
| KR101918230B1 (ko) | 차량용 램프 및 차량 | |
| JP4350563B2 (ja) | 自車存在報知装置および自車存在報知方法 | |
| US10926778B2 (en) | Autonomous vehicle control device | |
| JP4889822B1 (ja) | 車外への音発生装置 | |
| JP7088899B2 (ja) | 自動運転車用情報提示装置 | |
| JP6971300B2 (ja) | 車両制御装置、車両制御方法及びプログラム | |
| JP2020052863A (ja) | 車両監視装置 | |
| CN112298022A (zh) | 一种迎宾系统、方法、车辆及计算机存储介质 | |
| CN112298016A (zh) | 一种远光灯提醒系统、方法、车辆及计算机存储介质 | |
| CN112298021A (zh) | 一种环境交互系统、方法、车辆及计算机存储介质 | |
| CN111098864B (zh) | 提示方法、装置、自动驾驶车辆及存储介质 | |
| JP2021092981A (ja) | 自動運転車用情報提示装置 | |
| JP4889823B1 (ja) | 車外への音発生装置 | |
| JP4889812B2 (ja) | 車外への音発生装置 | |
| JP4889824B1 (ja) | 車外への音発生装置 | |
| JP4889826B1 (ja) | 車外への音発生装置 | |
| CN112298017A (zh) | 一种互动系统、方法及计算机存储介质 | |
| JP2021107974A (ja) | 車両制御装置、車両制御方法及びプログラム | |
| JP4889825B1 (ja) | 車外への音発生装置 | |
| JP2022118028A (ja) | 自動運転車及び自動運転車用プログラム | |
| CN112365729A (zh) | 一种路况提醒系统、方法、车辆及计算机存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111018 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111018 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20111018 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20111104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111115 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4889812 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141222 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |