JP4886432B2 - 超音波診断装置 - Google Patents
超音波診断装置 Download PDFInfo
- Publication number
- JP4886432B2 JP4886432B2 JP2006238878A JP2006238878A JP4886432B2 JP 4886432 B2 JP4886432 B2 JP 4886432B2 JP 2006238878 A JP2006238878 A JP 2006238878A JP 2006238878 A JP2006238878 A JP 2006238878A JP 4886432 B2 JP4886432 B2 JP 4886432B2
- Authority
- JP
- Japan
- Prior art keywords
- scanning
- data
- doppler
- cursor
- diagnostic apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 claims description 45
- 239000000523 sample Substances 0.000 claims description 18
- 210000004204 blood vessel Anatomy 0.000 claims description 15
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000002604 ultrasonography Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 36
- 238000010586 diagram Methods 0.000 description 3
- 230000017531 blood circulation Effects 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 239000013589 supplement Substances 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
Description
しかし、設定したドプラカーソルが血管を外れていないか、4つの2D画像を操作者が見比べて確認する必要があり、必ずしも操作が容易ではなかった。また、角度カーソルが血管の方向に沿っていることを容易に確認できない問題点があった。
そこで、本発明の目的は、ドプラカーソルや角度カーソルの設定を行う際にドプラカーソルや角度カーソルが的確に設定されているか否かを容易に確認することが出来る超音波診断装置を提供することにある。
上記第1の観点による超音波診断装置では、3D画像上に、ドプラ計測のための2D走査面の位置とドプラカーソルとが表示される。そして、操作者が投影方向を変更する指示を与えることによって、視線方向を変えた3D画像を見ることが出来る。よって、ドプラカーソルが的確に設定されているか否かを容易に確認することが出来る。なお、操作者がドプラカーソルの位置を変更する指示を与えることによって、ドプラカーソルを適正な位置へ動かすことも出来る。
上記第2の観点による超音波診断装置では、現在の2Dデータや3Dデータに関係なく、最初はデフォルトの位置にドプラカーソルを設定する。デフォルトの位置を記憶しておけばよいので、処理が簡単になる。
上記第3の観点による超音波診断装置では、現在のデータを基にドプラ計測のための2D走査面を通る血管を抽出し、その位置にドプラカーソルを設定する。ある程度、操作者の手間を省くことが出来る。
上記第4の観点による超音波診断装置では、操作者が超音波探触子を動かすことによって、ドプラ計測のための2D走査面を動かすことが出来る。
上記第5の観点による超音波診断装置では、被検体が動いたり、操作者が意図せずに超音波探触子を動かしてしまっても、ドプラ計測のための2D走査面を追従させることが出来る。
上記第6の観点による超音波診断装置では、操作者が指定した2D走査面の位置を記憶しておけばよいので、処理が簡単になる。
上記第7の観点による超音波診断装置では、リアルタイムの3D画像(または4D画像)を操作者が見ることが出来るので、被検体が動いたり、操作者が意図せずに超音波探触子を動かしてしまっても、ドプラカーソルの位置の適否を正確に視認できる。
上記第8の観点による超音波診断装置では、被検体が動いたり、操作者が意図せずに超音波探触子を動かしてしまっても、ドプラ計測のための2D走査面を追従させることが出来る。
上記第9の観点による超音波診断装置では、3D画像上に、角度カーソルが表示される。そして、操作者が投影方向を変更する指示を与えることによって、視線方向を変えた3D画像を見ることが出来る。よって、角度カーソルが的確に設定されているか否かを容易に確認することが出来る。なお、操作者が角度カーソルの位置を変更する指示を与えることによって、角度カーソルを適正な方向に動かすことも出来る。
上記第10の観点による超音波診断装置では、現在の2Dデータや3Dデータに関係なく、最初はデフォルトの方向に角度カーソルを設定する。デフォルトの方向を記憶しておけばよいので、処理が簡単になる。
上記第11の観点による超音波診断装置では、現在の3Dデータを基にドプラ計測する血管の方向を抽出し、その方向に角度カーソルを設定する。ある程度、操作者の手間を省くことが出来る。
上記第12の観点による超音波診断装置では、ドプラ計測のための2D走査面の位置とドプラカーソルの位置も同時に確認できる。
上記第13の観点による超音波診断装置では、操作者が超音波探触子を動かすことによって、ドプラ計測のための2D走査面を動かすことが出来る。
上記第14の観点による超音波診断装置では、被検体が動いたり、操作者が意図せずに超音波探触子を動かしてしまっても、ドプラ計測のための2D走査面を追従させることが出来る。
上記第15の観点による超音波診断装置では、操作者が指定した2D走査面の位置を記憶しておけばよいので、処理が簡単になる。
上記第16の観点による超音波診断装置では、リアルタイムの3D画像を操作者が見ることが出来るので、被検体が動いたり、操作者が意図せずに超音波探触子を動かしてしまっても、角度カーソルの位置の適否を正確に視認することが出来る。
上記第17の観点による超音波診断装置では、被検体が動いたり、操作者が意図せずに超音波探触子を動かしてしまっても、ドプラ計測のための2D走査面を追従させることが出来る。
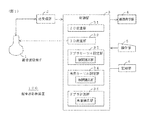
この超音波診断装置100は、電子走査による2D走査および電動走査(モータによる走査)または電子走査による3D走査が可能な超音波探触子1と、超音波探触子1を駆動して被検体内を超音波ビームで2D走査および3D走査する送受信部2と、制御部3と、2D画像等を表示する画像表示部4と、操作者が指示やデータを与えるための操作部5と、2D画像等を記録する記録部6とを具備している。
3D走査部32は、3D走査を制御し、3Dデータを記憶し、3Dデータを所定の投影方向に投影した3D画像の作成を行う。
ドプラカーソル設定部33は、後述するドプラカーソル設定処理を実行する。2Dデータと3Dデータの相関をとって位置関係を補正する相関補正部を含んでいる。
角度カーソル設定部34は、後述する角度カーソル設定処理を実行する。2Dデータと3Dデータの相関をとって位置関係を補正する相関補正部を含んでいる。
ドプラ計測部35は、ドプラカーソルの位置をドプラ計測点として流速をドプラ計測し、流速分布画像(流速分布の時間変化のグラフ)を作成する。ドプラ計測した結果を超音波ビームと角度カーソルの成す角度で補正する角度補正部を含んでいる。
ステップS1では、2D走査モードにする。すなわち、2D走査部31で、2D走査による2Dデータを得て記憶し、2D画像を作成する。そして、2D画像を画像表示部4に表示する。なお、2D走査モードでの2D走査面の位置は、予め設定されているデフォルトの走査面の位置とする。
ステップS4では、操作者が3D画像によるドプラカーソルの位置の確認をする操作をしたらステップS6へ進み、その操作をしない場合はステップS3に戻る。
図4に、3DデータVを概念的に示す。図4の(a)は正面図、(b)は側面図、(c)は上面図である。fは、血管である。
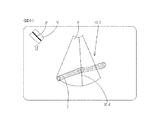
図5に、3D画像G2を例示する。pは2D走査面の位置である。画面の左上に、3次元データVの平面図と、2D走査面の位置Pと、投影方向を示す矢印とが表示されている。
ステップS10では、操作者による投影方向の変更とドプラカーソルの位置変更とを受け付ける。
ステップS11では、操作者の指示に応じて投影方向の変更とドプラカーソルの位置変更とを行う。そして、ステップS7に戻る。
図6に、投影方向の変更をした後の3D画像G2を例示する。なお、この例では、投影方向を水平方向に回転しているが、垂直方向に回転させてもよい。
ステップA1では、3D走査部32で3D走査による3Dデータを得て記憶する。
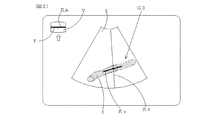
図8に、3D画像G3を例示する。Kaは角度カーソルである。画面の左上に、3次元データVの平面図と、2D走査面の位置Pと、投影方向を示す矢印と、角度カーソルKaの平面図KAとが表示されている。
ステップA5では、操作者による投影方向の変更と角度カーソルの方向変更とを受け付ける。
ステップA6では、操作者の指示に応じて投影方向の変更と角度カーソルの方向変更とを行う。そして、ステップA2に戻る。
図9に、投影方向の変更をした後の3D画像G4を例示する。なお、この例では、投影方向を水平方向に回転しているが、垂直方向に回転させてもよい。
ステップF1では、ドプラカーソルで規定されたドプラ計測点でドプラ計測を行って血流の流速を得る。この計測結果は実際の流速の超音波ビーム方向成分であるから、超音波ビームの方向と角度カーソルの方向の成す角度により流速補正を行って実際の流速を得る。そして、流速分布画像を作成し、画像表示部4に表示する。
ステップF2では、操作者が処理を終了する操作をしたら処理を終了し、そうでなければステップF1に戻る。
実施例2のドプラカーソル設定処理では、3Dデータがリアルタイムに更新され、2D走査面の位置はリアルタイムに更新されない。
ステップS1〜S3は、実施例1と同じである。
ステップS4では、操作者が3D画像によるドプラカーソルの位置の確認をする操作をしたらステップS5へ進み、その操作をしない場合はステップS3に戻る。
ステップS5では、現在の2D走査面の位置を記憶する。そして、ステップS6へ進む。
ステップS8〜S10は、実施例1と同じである。
ステップS11では、操作者の指示に応じて投影方向の変更とドプラカーソルの位置変更とを行う。そして、ステップS6に戻る。
実施例3の角度カーソル設定処理では、3Dデータがリアルタイムに更新され、2D走査面の位置はリアルタイムに更新されない。
ステップA1では、3D走査部32で3D走査による3Dデータを得て記憶する。そして、ステップA3へ進む。
ステップA3〜A5は、実施例1と同じである。
ステップA6では、操作者の指示に応じて投影方向の変更と角度カーソルの方向変更とを行う。そして、ステップA1に戻る。
ステップA7は、実施例1と同じである。
2 送受信部
3 制御部
4 画像表示部
5 操作部
100 超音波診断装置
Kd ドプラカーソル
Ka 角度カーソル
V 3Dデータ
Claims (7)
- 電子走査による2D走査および電動走査または電子走査による3D走査が可能な超音波探触子と、
前記超音波探触子を駆動して被検体内を超音波ビームで2D走査および3D走査を行う送受信手段と、
3D走査を行って得た3Dデータを記憶する記憶手段と、
前記記憶手段に記憶された3Dデータと、前記3Dデータが形成する3D空間内に存在する、ドプラ計測のための2D走査面のデータ及びドプラカーソルのデータとを用いて、所定の視線方向から見た3D画像を表示装置に表示する表示手段と、
操作者の指示を受け付けて該指示に応じて前記視線方向および前記ドプラカーソルの位置を変更する指示対応変更手段と、
位置が確定された、前記ドプラ計測のための2D走査面のデータ及び前記ドプラカーソルを用いてドプラ計測を行うドプラ計測手段とを具備し、
前記送受信手段は、ドプラ計測前に3D走査を行った後、3D走査をリアルタイムに行わず、2D走査をリアルタイムに行って2D走査面のデータを順次更新してドプラ計測を行うことを特徴とする超音波診断装置。 - 請求項1に記載の超音波診断装置において、
前記ドプラカーソルの最初の位置は、予め設定された位置又はデータから抽出した血管の位置であることを特徴とする超音波診断装置。 - 請求項1又は請求項2に記載の超音波診断装置において、
前記表示手段は、更にドプラ観測点での血管の方向を表す角度カーソルのデータとを用いて、所定の視線方向から見た3D画像を表示装置に表示し、
前記指示対応変更手段は、更に操作者の指示を受け付けて該指示に応じて前記角度カーソルの方向を変更し、
前記ドプラ計測での超音波ビームの方向と確定した角度カーソルの方向との成す角度により前記ドプラ計測の結果を補正する補正手段とを具備したことを特徴とする超音波診断装置。 - 請求項3に記載の超音波診断装置において、
前記角度カーソルの最初の方向は、予め設定された方向又は3Dデータから抽出した血管の方向であることを特徴とする超音波診断装置。 - 請求項1から請求項4のいずれかに記載の超音波診断装置において、
前記表示手段は、3Dデータにおける前記ドプラ計測のための2D走査面位置及び前記視線方向を前記表示装置に表示することを特徴とする超音波診断装置。 - 請求項1から請求項5のいずれかに超音波診断装置において、
前記3Dデータと前記リアルタイムに2D走査して得たリアルタイム2Dデータとの相関により前記2D走査面の位置を補正する位置補正手段を具備したことを特徴とする超音波診断装置。 - 請求項1から請求項6のいずれかに記載の超音波診断装置において、
前記ドプラ計測のための2D走査面の位置は、操作者が指定した2D走査面の位置であることを特徴とする超音波診断装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006238878A JP4886432B2 (ja) | 2006-09-04 | 2006-09-04 | 超音波診断装置 |
| US11/848,771 US7905837B2 (en) | 2006-09-04 | 2007-08-31 | Ultrasound diagnostic apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006238878A JP4886432B2 (ja) | 2006-09-04 | 2006-09-04 | 超音波診断装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008055101A JP2008055101A (ja) | 2008-03-13 |
| JP2008055101A5 JP2008055101A5 (ja) | 2011-05-26 |
| JP4886432B2 true JP4886432B2 (ja) | 2012-02-29 |
Family
ID=39152754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006238878A Active JP4886432B2 (ja) | 2006-09-04 | 2006-09-04 | 超音波診断装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7905837B2 (ja) |
| JP (1) | JP4886432B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8781555B2 (en) | 2007-11-26 | 2014-07-15 | C. R. Bard, Inc. | System for placement of a catheter including a signal-generating stylet |
| ES2651898T3 (es) | 2007-11-26 | 2018-01-30 | C.R. Bard Inc. | Sistema integrado para la colocación intravascular de un catéter |
| US9456766B2 (en) | 2007-11-26 | 2016-10-04 | C. R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| US9521961B2 (en) | 2007-11-26 | 2016-12-20 | C. R. Bard, Inc. | Systems and methods for guiding a medical instrument |
| US9532724B2 (en) | 2009-06-12 | 2017-01-03 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation using endovascular energy mapping |
| US20110028845A1 (en) * | 2009-07-31 | 2011-02-03 | Bruno Hans Haider | Reconfigurable Ultrasound Array with Low Noise CW Processing |
| JP6081299B2 (ja) * | 2013-06-13 | 2017-02-15 | 東芝メディカルシステムズ株式会社 | 超音波診断装置 |
| EP2989992B1 (en) | 2014-09-01 | 2022-11-16 | Samsung Medison Co., Ltd. | Medical imaging apparatus and method of generating medical image |
| US11020563B2 (en) | 2016-07-14 | 2021-06-01 | C. R. Bard, Inc. | Automated catheter-to-vessel size comparison tool and related methods |
| EP3852622A1 (en) | 2018-10-16 | 2021-07-28 | Bard Access Systems, Inc. | Safety-equipped connection systems and methods thereof for establishing electrical connections |
| WO2021055289A1 (en) | 2019-09-20 | 2021-03-25 | Bard Access Systems, Inc. | Automatic vessel detection tools and methods |
| CN216675901U (zh) | 2020-07-21 | 2022-06-07 | 巴德阿克塞斯系统股份有限公司 | 用于跟踪超声探头以创建三维(3d)可视化的基于磁的跟踪系统 |
| EP4203801A1 (en) | 2020-09-03 | 2023-07-05 | Bard Access Systems, Inc. | Portable ultrasound systems and methods |
| WO2022067101A1 (en) | 2020-09-25 | 2022-03-31 | Bard Access Systems, Inc. | Minimum catheter length tool |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06217975A (ja) * | 1993-01-28 | 1994-08-09 | Toshiba Medical Eng Co Ltd | 超音波ドプラ診断装置 |
| US5682896A (en) | 1996-03-28 | 1997-11-04 | Diasonics Ultrasound, Inc. | Method and apparatus for generating volume flow measurement |
| JP3936450B2 (ja) * | 1997-11-25 | 2007-06-27 | ジーイー横河メディカルシステム株式会社 | 投影画像生成装置及び医用画像装置 |
| JP4282130B2 (ja) * | 1999-01-19 | 2009-06-17 | 株式会社東芝 | 3次元超音波診断装置 |
| JP4659950B2 (ja) * | 1999-08-20 | 2011-03-30 | 株式会社東芝 | 超音波診断装置 |
| US6599244B1 (en) | 1999-12-23 | 2003-07-29 | Siemens Medical Solutions, Usa, Inc. | Ultrasound system and method for direct manipulation interface |
| US6390984B1 (en) | 2000-09-14 | 2002-05-21 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for locking sample volume onto moving vessel in pulsed doppler ultrasound imaging |
| JP2003061958A (ja) * | 2001-06-15 | 2003-03-04 | Toshiba Medical System Co Ltd | 超音波診断装置 |
| JP4177217B2 (ja) * | 2003-09-24 | 2008-11-05 | アロカ株式会社 | 超音波診断装置 |
| JP4113485B2 (ja) * | 2003-09-24 | 2008-07-09 | アロカ株式会社 | 超音波画像処理装置 |
| JP4634814B2 (ja) * | 2005-02-03 | 2011-02-16 | 株式会社東芝 | 超音波診断装置 |
-
2006
- 2006-09-04 JP JP2006238878A patent/JP4886432B2/ja active Active
-
2007
- 2007-08-31 US US11/848,771 patent/US7905837B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20080058645A1 (en) | 2008-03-06 |
| JP2008055101A (ja) | 2008-03-13 |
| US7905837B2 (en) | 2011-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4886432B2 (ja) | 超音波診断装置 | |
| US8617075B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic imaging method | |
| US8585600B2 (en) | Ultrasound volume probe navigation and control method and device | |
| CN108784735B (zh) | 用于显示采集质量水平的超声成像系统和方法 | |
| JP6063454B2 (ja) | 超音波診断装置及び軌跡表示方法 | |
| JP2008055101A5 (ja) | ||
| JP4958455B2 (ja) | 超音波診断装置 | |
| JP5636467B2 (ja) | 超音波診断装置 | |
| JPH09192131A (ja) | 超音波診断装置におけるリアルタイムバイプレーン像表示方法 | |
| JP2016523164A (ja) | 解剖学的にインテリジェントな心エコー検査法における肋骨妨害物描出 | |
| KR101656127B1 (ko) | 계측 장치 및 그 제어 프로그램 | |
| JP2007202829A (ja) | 超音波診断装置 | |
| JP2014121434A (ja) | 超音波診断装置およびその収集状態表示方法 | |
| JP4865575B2 (ja) | 超音波診断装置 | |
| JP3410404B2 (ja) | 超音波診断装置 | |
| WO2016190328A1 (ja) | 超音波診断装置 | |
| JP2009261520A (ja) | 超音波撮像装置 | |
| JP2007195854A (ja) | 超音波診断装置 | |
| US8942453B2 (en) | Ultrasonograph and method of diagnosis using same | |
| JP2009011449A (ja) | 超音波診断装置 | |
| JP6082783B2 (ja) | 超音波診断装置 | |
| JP2006081640A (ja) | 超音波撮像装置、画像処理装置およびプログラム | |
| KR102598211B1 (ko) | 방광내 요량 측정용 초음파 스캐너 | |
| KR102615722B1 (ko) | 초음파 스캐너 및 초음파 스캐너에서의 조준 가이드 방법 | |
| JP5809302B2 (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20090114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110412 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111209 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4886432 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |