JP4852425B2 - 自動移動可能な床塵収集装置 - Google Patents
自動移動可能な床塵収集装置 Download PDFInfo
- Publication number
- JP4852425B2 JP4852425B2 JP2006543553A JP2006543553A JP4852425B2 JP 4852425 B2 JP4852425 B2 JP 4852425B2 JP 2006543553 A JP2006543553 A JP 2006543553A JP 2006543553 A JP2006543553 A JP 2006543553A JP 4852425 B2 JP4852425 B2 JP 4852425B2
- Authority
- JP
- Japan
- Prior art keywords
- floor dust
- dust collecting
- floor
- obstacle
- tactile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/009—Carrying-vehicles; Arrangements of trollies or wheels; Means for avoiding mechanical obstacles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0227—Control of position or course in two dimensions specially adapted to land vehicles using mechanical sensing means, e.g. for sensing treated area
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Electric Vacuum Cleaner (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Suction Cleaners (AREA)
- Manipulator (AREA)
- Geophysics And Detection Of Objects (AREA)
- Electrostatic Separation (AREA)
Description
さらに、擾乱と事象が不正確な障害物検知の原因となる。例えば、カーペットから硬い床への移動及びその逆におけるような不均一さ、床カバーリング(床被覆材)の浮き彫り状の表面構造に起因する不均一さと共に、曲線的な加速、ターンまたは移動のときの動作に起因する振動により、計測が不正確となる。公知の感度のよいセンサ技術は、移動動作に起因する振動等の擾乱の影響を受けやすい。この問題は、強力なバネを用いたサスペンションにより対応可能であり、センサがトリガされる前に、例えばロボットのフードの動きを制限する効果を得ることもできる。このような障害物検知は、究極的には擾乱の影響を受けないが、感度が鈍くもある。その結果、この解決手段は、感度が不適切であることが判明しており、衝突の事象の際には、物体や家具が損傷を受ける結果となる。
さらに、床塵収集装置が外殻を有し、それらの触覚要素が外殻から突出した位置にある。好適には、床塵収集装置は円周の外殻形状を有する。好適には、触覚要素は外周の25%以上に対応する領域を覆う。さらに好適には、触覚要素が床塵収集装置の全周囲に亘って設置されることにより、突出位置に設けられた触覚要素がバンパーリングの形態でともに作用する。これに関して、触覚要素が剛性部品として形成されてもよく、それがその脚部にて弾性的に装着される。脚部は床塵収集装置の外殻と結合している。障害物と接触するとき、このような触覚要素により摩擦要素が変位させられてもよい。摩擦力は一般的に直接的な衝突により誘起される力より小さく、触覚要素を介してこの摩擦要素を変位させる。例えば衝撃に対して引っ張られるバネによる復帰力が、摩擦要素を再び初期位置に戻す。
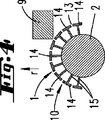
掃除ロボットの形態での床塵収集装置1について図示しかつ説明する。この床塵収集装置1は、処理対象である床に対向する下側に、電気モータにより駆動される移動輪3と、同じく電気モータにより駆動されシャーシベース4の下端面を超えて突出するブラシ5を設けている。シャーシ2を覆う装置フード6が取り付けられ、この床塵収集装置1は円形の外殻形状を有している。しかしながら、床塵収集装置1はまた円形外殻形状以外でもよく、半円形状部分とそれに連結された長方形状部分とから形成されてもよい。
Claims (9)
- 電気モータ駆動手段と、塵収集容器と、フードと、障害物検知手段(10)と、を備えた自動移動可能な床塵収集装置(1)において、
前記障害物検知手段(10)は、前記床塵収集装置(1)の外殻から突出した位置に設けられた複数の触覚要素(14)を具備しており、
少なくとも1つの前記触覚要素(14)は、床から距離を以て配置され、かつ、前記床塵収集装置(1)が障害物の下側を走行することを避けるために前記床塵収集装置(1)の頂部を超えて突出した位置にて能動的に可動であることを特徴とする自動移動可能な床塵収集装置。 - 前記触覚要素(14)が、前記床塵収集装置(1)の中心に位置する垂直軸(x)の周りで可動であることを特徴とする請求項1に記載の自動移動可能な床塵収集装置。
- 前記触覚要素(14)が、前記床塵収集装置(1)の水平面内で可動であることを特徴とする請求項1に記載の自動移動可能な床塵収集装置。
- 前記触覚要素(14)が、前記床塵収集装置(1)の垂直面内で可動であることを特徴とする請求項1に記載の自動移動可能な床塵収集装置。
- 前記触覚要素(14)が、前記床塵収集装置の外殻の外側にある垂直軸(y)の周りで可動であることを特徴とする請求項1に記載の自動移動可能な床塵収集装置。
- 多数の前記触覚要素(14)が、前記外殻の周囲に亘って分布するように設けられることを特徴とする請求項5に記載の自動移動可能な床塵収集装置。
- 前記触覚要素(14)がブラシ(16)を設けられ、前記ブラシ(16)が前記垂直軸(y)の周りで回転することを特徴とする請求項5又は6に記載の自動移動可能な床塵収集装置。
- 前記触覚要素(14)が、前記床塵収集装置(1)の外殻上に装着された外周触覚バンド(18)の一部であり、前記外周触覚バンド(18)が具備する径方向に突出する剛毛(17)の形態であることを特徴とする請求項1に記載の自動移動可能な床塵収集装置。
- 前記触覚要素(14)の評価が、前記触覚要素(14)の運動のために必要な駆動電流をモニタリングすることにより行われる請求項1〜8のいずれかに記載の自動移動可能な床塵収集装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10357636.3 | 2003-12-10 | ||
| DE10357636A DE10357636B4 (de) | 2003-12-10 | 2003-12-10 | Selbsttätig verfahrbares Bodenstaub-Aufsammelgerät |
| PCT/EP2004/053390 WO2005087071A2 (de) | 2003-12-10 | 2004-12-10 | Selbsttätig verfahrbares bodenstaub-aufsammelgerät |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010063771A Division JP4914925B2 (ja) | 2003-12-10 | 2010-03-19 | 自動移動可能な床塵収集装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007513661A JP2007513661A (ja) | 2007-05-31 |
| JP4852425B2 true JP4852425B2 (ja) | 2012-01-11 |
Family
ID=34672535
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006543553A Expired - Fee Related JP4852425B2 (ja) | 2003-12-10 | 2004-12-10 | 自動移動可能な床塵収集装置 |
| JP2010063771A Expired - Fee Related JP4914925B2 (ja) | 2003-12-10 | 2010-03-19 | 自動移動可能な床塵収集装置 |
| JP2011150506A Pending JP2011218210A (ja) | 2003-12-10 | 2011-07-07 | 自動移動可能な床塵収集装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010063771A Expired - Fee Related JP4914925B2 (ja) | 2003-12-10 | 2010-03-19 | 自動移動可能な床塵収集装置 |
| JP2011150506A Pending JP2011218210A (ja) | 2003-12-10 | 2011-07-07 | 自動移動可能な床塵収集装置 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP1691656B1 (ja) |
| JP (3) | JP4852425B2 (ja) |
| CN (6) | CN101310665B (ja) |
| DE (1) | DE10357636B4 (ja) |
| RU (1) | RU2006124564A (ja) |
| WO (1) | WO2005087071A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210117628A (ko) * | 2020-03-19 | 2021-09-29 | 엘아이지넥스원 주식회사 | 로봇용 감지장치 |
Families Citing this family (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US6956348B2 (en) | 2004-01-28 | 2005-10-18 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US7571511B2 (en) | 2002-01-03 | 2009-08-11 | Irobot Corporation | Autonomous floor-cleaning robot |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US7663333B2 (en) | 2001-06-12 | 2010-02-16 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US9128486B2 (en) | 2002-01-24 | 2015-09-08 | Irobot Corporation | Navigational control system for a robotic device |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| WO2005098476A1 (en) | 2004-03-29 | 2005-10-20 | Evolution Robotics, Inc. | Method and apparatus for position estimation using reflected light sources |
| JP2008508572A (ja) | 2004-06-24 | 2008-03-21 | アイロボット コーポレーション | 携帯ロボットのプログラミングおよび診断ツール |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| WO2006089307A2 (en) | 2005-02-18 | 2006-08-24 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US7620476B2 (en) | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| DE102005046639A1 (de) * | 2005-09-29 | 2007-04-05 | Vorwerk & Co. Interholding Gmbh | Selbständig verfahrbares Bodenstaub-Aufsammelgerät |
| EP2544066B1 (en) | 2005-12-02 | 2018-10-17 | iRobot Corporation | Robot system |
| EP2829939B1 (en) | 2005-12-02 | 2019-11-13 | iRobot Corporation | Autonomous coverage robot navigation system |
| JP4972100B2 (ja) | 2005-12-02 | 2012-07-11 | アイロボット コーポレイション | モジュール式ロボット |
| KR101300493B1 (ko) | 2005-12-02 | 2013-09-02 | 아이로보트 코퍼레이션 | 커버리지 로봇 이동성 |
| EP2816434A3 (en) | 2005-12-02 | 2015-01-28 | iRobot Corporation | Autonomous coverage robot |
| DE102006006465A1 (de) * | 2006-02-10 | 2007-08-16 | Miele & Cie. Kg | Vorrichtung zur Hinderniserkennung |
| US8528157B2 (en) | 2006-05-19 | 2013-09-10 | Irobot Corporation | Coverage robots and associated cleaning bins |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| EP2995236B1 (en) | 2007-05-09 | 2022-10-05 | iRobot Corporation | Compact autonomous coverage robot |
| DE102007036223B4 (de) * | 2007-08-02 | 2019-05-09 | BSH Hausgeräte GmbH | Stoßfängervorrichtung für ein fahrbares Gerät sowie fahrbares Gerät, insbesondere akkumulatorbetriebener, selbstständig verfahrbarer Staubsammelroboter mit einer Stoßfängervorrichtung |
| TWI421054B (zh) | 2007-12-17 | 2014-01-01 | Vorwerk Co Interholding | 吸塵器 |
| EP2240836B1 (en) * | 2008-02-01 | 2011-11-30 | Koninklijke Philips Electronics N.V. | Device comprising at least a body and a bumper, and robot cleaner comprising such a device |
| DE102008009615B4 (de) | 2008-02-18 | 2017-12-21 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Bodenstaub-Aufsammelgerät sowie Sensoranordnung |
| CN101554304B (zh) * | 2008-04-11 | 2012-05-02 | 乐金电子(天津)电器有限公司 | 一种主动驱动式真空吸尘器 |
| DE102009035149A1 (de) | 2009-07-29 | 2011-02-03 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Bodenstaub-Aufsammelgerät |
| DE102009041362A1 (de) | 2009-09-11 | 2011-03-24 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betreiben eines Reinigungsroboters |
| DE102009052629A1 (de) | 2009-11-10 | 2011-05-12 | Vorwerk & Co. Interholding Gmbh | Verfahren zur Steuerung eines Roboters |
| DE102010000174B4 (de) | 2010-01-22 | 2022-09-01 | Vorwerk & Co. Interholding Gesellschaft mit beschränkter Haftung | Verfahren zur Reinigung eines Raumes mittels eines selbsttätig verfahrbaren Reinigungsgerätes |
| EP3192419B1 (en) | 2010-02-16 | 2021-04-07 | iRobot Corporation | Vacuum brush |
| CN102221240B (zh) * | 2010-04-14 | 2014-02-19 | 泰怡凯电器(苏州)有限公司 | 地面处理装置 |
| CN102221256B (zh) * | 2010-04-14 | 2014-02-19 | 泰怡凯电器(苏州)有限公司 | 空气处理装置 |
| DE102010017689A1 (de) * | 2010-07-01 | 2012-01-05 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Gerät sowie Verfahren zur Orientierung eines solchen Gerätes |
| KR101302149B1 (ko) * | 2011-08-18 | 2013-08-30 | 이상열 | 로봇청소기의 장애물 감지장치 및 이를 구비한 로봇청소기 |
| DE102011085565A1 (de) * | 2011-11-02 | 2013-05-02 | Robert Bosch Gmbh | Autonomes Arbeitsgerät |
| CN102689313A (zh) * | 2012-06-11 | 2012-09-26 | 长安大学 | 基于飞行机器人的高空危险环境物品清理系统及清理方法 |
| CN103505140B (zh) * | 2012-06-28 | 2016-12-21 | 科沃斯机器人股份有限公司 | 擦玻璃装置 |
| CN103622643A (zh) * | 2012-08-29 | 2014-03-12 | 科沃斯机器人科技(苏州)有限公司 | 自移动清洁装置 |
| KR101395888B1 (ko) * | 2013-03-21 | 2014-05-27 | 엘지전자 주식회사 | 로봇 청소기 및 그 동작방법 |
| TWI483704B (zh) * | 2013-05-28 | 2015-05-11 | Uni Ring Tech Co Ltd | Self - propelled cleaning equipment - Dust detection method and device |
| CN104414573B (zh) * | 2013-08-23 | 2017-12-22 | 科沃斯机器人股份有限公司 | 擦窗装置 |
| DE102014100013A1 (de) * | 2014-01-02 | 2015-07-02 | Miele & Cie. Kg | Autonomes Bodenbearbeitungsgerät |
| CN104000543B (zh) * | 2014-06-16 | 2016-05-04 | 成都北斗群星智能科技有限公司 | 扫地机器人碰撞避障结构 |
| EP3166463A1 (de) * | 2014-07-07 | 2017-05-17 | Carl Freudenberg KG | Verfahrbare vorrichtung |
| KR101649665B1 (ko) | 2015-04-29 | 2016-08-30 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| US9505140B1 (en) * | 2015-06-02 | 2016-11-29 | Irobot Corporation | Contact sensors for a mobile robot |
| CN105137994A (zh) * | 2015-09-10 | 2015-12-09 | 珠海市一微半导体有限公司 | 机器人障碍物检测系统及方法 |
| CN105182981B (zh) * | 2015-10-14 | 2020-03-10 | 珠海格力电器股份有限公司 | 机器人的行进方法、控制方法、控制系统和服务器 |
| WO2017133638A1 (zh) | 2016-02-03 | 2017-08-10 | 苏州宝时得电动工具有限公司 | 自移动设备及自移动设备的控制方法 |
| CN107149435A (zh) * | 2016-03-04 | 2017-09-12 | 科沃斯机器人股份有限公司 | 自移动机器人 |
| CN206443655U (zh) * | 2016-09-13 | 2017-08-29 | 深圳市银星智能科技股份有限公司 | 一种机器人的触碰传感装置和机器人 |
| FR3055787B1 (fr) * | 2016-09-13 | 2019-03-22 | Seb S.A. | Robot de nettoyage des sols |
| CN106333631B (zh) * | 2016-11-11 | 2022-03-08 | 北京地平线机器人技术研发有限公司 | 可移动清洁设备及其控制方法 |
| JP6335372B2 (ja) * | 2017-06-22 | 2018-05-30 | シャープ株式会社 | 自走式電子機器 |
| CN108577701B (zh) * | 2018-04-18 | 2020-06-02 | 绍兴市华获智能装备有限公司 | 一种智能家居机器人 |
| CN109222771A (zh) * | 2018-11-02 | 2019-01-18 | 珠海市微半导体有限公司 | 一种基于清洁机器人的凸起感应装置及脱困方法 |
| CN109786600A (zh) * | 2018-12-30 | 2019-05-21 | 浙江众泰汽车制造有限公司 | 一种新能源汽车动力电池的碰撞防护系统和方法 |
| GB2583081B (en) * | 2019-04-10 | 2021-07-21 | Ross Robotics Ltd | Mobile device capable of autonomous travel |
| CN112711250B (zh) * | 2019-10-25 | 2022-07-05 | 科沃斯机器人股份有限公司 | 一种自行走设备移动控制方法与自行走设备 |
| CN113648666B (zh) * | 2021-08-23 | 2023-01-13 | 浙江飞神车业有限公司 | 一种遥控模型车及其障碍自主规避机构 |
| WO2023112690A1 (ja) * | 2021-12-13 | 2023-06-22 | ソニーグループ株式会社 | 移動ロボット、制御方法、プログラム、およびスイッチモジュール |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58115384A (ja) * | 1981-12-29 | 1983-07-09 | Fuji Heavy Ind Ltd | 自動車の障害物検知装置 |
| JPS60191855A (ja) * | 1984-03-12 | 1985-09-30 | Toshiba Corp | 無人搬送車の衝突検知装置 |
| JPS63155306A (ja) * | 1986-12-19 | 1988-06-28 | Hitachi Ltd | 自律走行移動車 |
| DE3863282D1 (de) * | 1987-11-11 | 1991-07-18 | Siemens Ag | Fahrbarer staubsauger. |
| US4962453A (en) * | 1989-02-07 | 1990-10-09 | Transitions Research Corporation | Autonomous vehicle for working on a surface and method of controlling same |
| JP2847929B2 (ja) * | 1990-08-10 | 1999-01-20 | 松下電器産業株式会社 | 移動体の壁沿い移動装置並びにこれを有する床面掃除機 |
| JPH0496717A (ja) * | 1990-08-13 | 1992-03-30 | Matsushita Electric Ind Co Ltd | 移動体のバンパー及びこれを有する自走式掃除機 |
| JPH064130A (ja) * | 1992-06-23 | 1994-01-14 | Sanyo Electric Co Ltd | 掃除ロボット |
| JP2692725B2 (ja) * | 1993-09-21 | 1997-12-17 | 工業技術院長 | 自律型移動ロボット群システムの制御方法 |
| KR970000582B1 (ko) * | 1994-03-31 | 1997-01-14 | 삼성전자 주식회사 | 로보트청소기의 주행제어방법 |
| JP3267116B2 (ja) * | 1995-09-19 | 2002-03-18 | ミノルタ株式会社 | 接触式センサおよび移動体 |
| SE506907C2 (sv) * | 1996-04-30 | 1998-03-02 | Electrolux Ab | System och anordning vid självorienterande anordning |
| JPH09319434A (ja) * | 1996-06-03 | 1997-12-12 | Minolta Co Ltd | 移動ロボット |
| US6226830B1 (en) * | 1997-08-20 | 2001-05-08 | Philips Electronics North America Corp. | Vacuum cleaner with obstacle avoidance |
| ATE259508T1 (de) * | 1997-11-27 | 2004-02-15 | Solar & Robotics S A | Verbesserungen bei beweglichen robotern und bei ihren steuerungssystemen |
| DE19916427B4 (de) * | 1998-07-31 | 2004-07-01 | Sommer, Volker, Dr.-Ing. | Haushaltsroboter zum automatischen Staubsaugen von Bodenflächen |
| GB2344884A (en) * | 1998-12-18 | 2000-06-21 | Notetry Ltd | Light Detection Apparatus - eg for a robotic cleaning device |
| DE10064836A1 (de) * | 2000-12-19 | 2002-06-27 | Iris Gmbh Infrared & Intellige | Roboter |
| ES2600352T3 (es) * | 2001-06-12 | 2017-02-08 | Irobot Corporation | Robot móvil |
| JP2003038402A (ja) * | 2001-08-02 | 2003-02-12 | Toshiba Tec Corp | 掃除装置 |
| KR100420171B1 (ko) * | 2001-08-07 | 2004-03-02 | 삼성광주전자 주식회사 | 로봇 청소기와 그 시스템 및 제어방법 |
| JP3724637B2 (ja) * | 2001-08-08 | 2005-12-07 | 東芝テック株式会社 | 掃除装置 |
| JP2003070703A (ja) * | 2001-09-03 | 2003-03-11 | Toshiba Tec Corp | 掃除装置 |
| DE10242257C5 (de) * | 2001-09-14 | 2017-05-11 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Bodenstaub-Aufsammelgerät, sowie Kombination eines derartigen Aufsammelgerätes und einer Basisstation |
| EP1331537B1 (en) * | 2002-01-24 | 2005-08-03 | iRobot Corporation | Method and system for robot localization and confinement of workspace |
-
2003
- 2003-12-10 DE DE10357636A patent/DE10357636B4/de not_active Expired - Lifetime
-
2004
- 2004-12-10 CN CN2008100926156A patent/CN101310665B/zh not_active Expired - Lifetime
- 2004-12-10 CN CN2008100832680A patent/CN101305895B/zh not_active Expired - Lifetime
- 2004-12-10 JP JP2006543553A patent/JP4852425B2/ja not_active Expired - Fee Related
- 2004-12-10 WO PCT/EP2004/053390 patent/WO2005087071A2/de not_active Ceased
- 2004-12-10 CN CN2008100926137A patent/CN101310664B/zh not_active Expired - Lifetime
- 2004-12-10 CN CN2008100926141A patent/CN101342065B/zh not_active Expired - Lifetime
- 2004-12-10 CN CN201010200732A patent/CN101856207A/zh active Pending
- 2004-12-10 RU RU2006124564/12A patent/RU2006124564A/ru not_active Application Discontinuation
- 2004-12-10 CN CNB200480036903XA patent/CN100411574C/zh not_active Expired - Lifetime
- 2004-12-10 EP EP04821629A patent/EP1691656B1/de not_active Expired - Lifetime
-
2010
- 2010-03-19 JP JP2010063771A patent/JP4914925B2/ja not_active Expired - Fee Related
-
2011
- 2011-07-07 JP JP2011150506A patent/JP2011218210A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210117628A (ko) * | 2020-03-19 | 2021-09-29 | 엘아이지넥스원 주식회사 | 로봇용 감지장치 |
| KR102337274B1 (ko) * | 2020-03-19 | 2021-12-08 | 엘아이지넥스원(주) | 로봇용 감지장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1691656B1 (de) | 2012-09-26 |
| CN101342065A (zh) | 2009-01-14 |
| JP4914925B2 (ja) | 2012-04-11 |
| CN101310665B (zh) | 2011-12-21 |
| RU2006124564A (ru) | 2008-01-20 |
| DE10357636A1 (de) | 2005-07-14 |
| CN101856207A (zh) | 2010-10-13 |
| JP2010162366A (ja) | 2010-07-29 |
| DE10357636B4 (de) | 2013-05-08 |
| JP2011218210A (ja) | 2011-11-04 |
| CN101305895A (zh) | 2008-11-19 |
| CN101305895B (zh) | 2010-10-20 |
| CN101310664B (zh) | 2010-10-13 |
| WO2005087071A3 (de) | 2005-11-24 |
| CN100411574C (zh) | 2008-08-20 |
| CN101310665A (zh) | 2008-11-26 |
| EP1691656A2 (de) | 2006-08-23 |
| JP2007513661A (ja) | 2007-05-31 |
| CN101342065B (zh) | 2010-09-22 |
| WO2005087071A2 (de) | 2005-09-22 |
| CN101310664A (zh) | 2008-11-26 |
| CN1889878A (zh) | 2007-01-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4852425B2 (ja) | 自動移動可能な床塵収集装置 | |
| CN107874708B (zh) | 自主行进的表面处理设备 | |
| CN107024933B (zh) | 包括传感器阵列的用于机器人的缓冲器 | |
| JP5301255B2 (ja) | 床掃除用集塵装置 | |
| US6999850B2 (en) | Sensors for robotic devices | |
| JP2011530369A (ja) | 衝突センサを持つ可動ロボット装置 | |
| CN110123213A (zh) | 一种扫地机 | |
| JP2005211494A (ja) | 自走式掃除機 | |
| CN100567922C (zh) | 碰撞检测装置、碰撞检测方法及应用其的机器人和吸尘器 | |
| KR20150139732A (ko) | 로봇 청소기 | |
| CN217168571U (zh) | 一种机器人及其碰撞检测装置 | |
| CN119632457A (zh) | 延边检测装置、清洁设备及其障碍物检测方法 | |
| AU2002214829B2 (en) | Sensors for robotic devices | |
| CN120436506A (zh) | 清洁机器人的控制方法及装置、清洁机器人 | |
| CN117297448A (zh) | 保险杠组件和洗地机 | |
| JPH0231357B2 (ja) | ||
| AU2002214829A1 (en) | Sensors for robotic devices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100319 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100615 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100811 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110405 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110708 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111004 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111024 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4852425 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |